

Geregelte Gleichstrommaschine (Aufgaben und Lösungen)
Geregelte Gleichstrommaschine (Aufgaben und Lösungen)
Geregelte Gleichstrommaschine (Aufgaben und Lösungen)

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Lehrstuhl für Elektrische Antriebssysteme, TU München<br />
Elektrische Antriebs– <strong>und</strong> Umrichtertechnik<br />
Gr<strong>und</strong>lagen der elektrischen Antriebe<br />
Lösung:<br />
*<br />
n<br />
Übung 5<br />
Blatt 3<br />
1. Der Umrichter wird als P T1–Glied angenähert. Damit weist die Strecke zur Stromregelung<br />
ein P T2–Verhalten auf mit einer großen Zeitkonstante T1 = TA, einer kleinen<br />
Zeitkonstante Tσ = Tt <strong>und</strong> der Verstärkung VS = VStr/rA = 1/rA = 10.<br />
Die Nachstellzeit des Reglers bestimmt sich damit zu TRi = TA = 20 ms <strong>und</strong> die Reglerverstärkung<br />
zu VRi = T1/(2TσVS) = TArA/(2Tt) = 0, 60. Die Übertragungsfunktionen<br />
der Strecke GSi <strong>und</strong> des Reglers GRi sind damit:<br />
GSi(s) =<br />
1<br />
1 + sTσ<br />
· 1<br />
rA<br />
1<br />
·<br />
1 + sTA<br />
GRi(s) =<br />
1 + sTRi<br />
VRi · = 0, 60 ·<br />
sTRi<br />
1 + s 20 ms<br />
s 20 ms<br />
Die Ersatzzeitkonstante des gesamten Stromregelkreises ist Ters i = 2Tt = 3, 33 ms.<br />
Die obige Optimierung des Stromreglers nach BO garantiert ein gutes Führungsverhalten.<br />
Hier tritt jedoch mit eA auch eine Störgröße auf, die ausgeregelt werden muß. Daher<br />
wäre eine Reglerauslegung noch SO günstiger (<strong>und</strong> wegen T1/Tσ = TA/Tt = 12 > 4<br />
auch zulässig). Allerdings ändert sich die Drehzahl (<strong>und</strong> damit auch eA) aufgr<strong>und</strong> der<br />
Trägheitszeitkonstante TΘN ≫ TA vergleichsweise langsam, wodurch der Unterschied<br />
zwischen beiden Auslegungen hier kaum auffällt.<br />
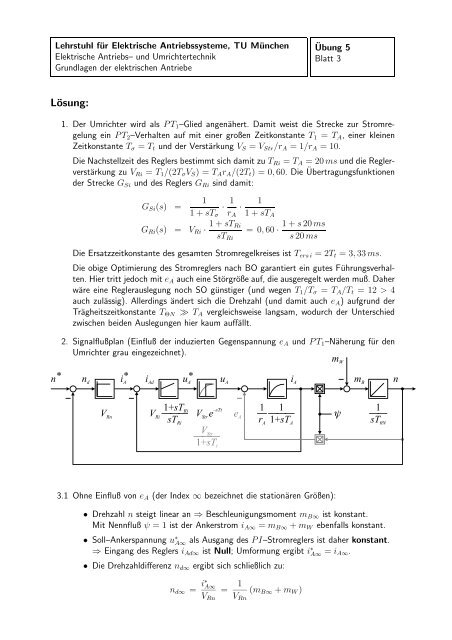
2. Signalflußplan (Einfluß der induzierten Gegenspannung eA <strong>und</strong> P T1–Näherung für den<br />
Umrichter grau eingezeichnet).<br />
mW n d<br />
V Rn<br />
*<br />
i A<br />
i Ad<br />
1+sTRi<br />
VRi <br />
sT<br />
Ri<br />
*<br />
u A<br />
–sTt<br />
VStre VStr<br />
<br />
1+ sT<br />
t<br />
u A<br />
e A<br />
1<br />
<br />
rA<br />
i A<br />
1<br />
<br />
1+sTA<br />
3.1 Ohne Einfluß von eA (der Index ∞ bezeichnet die stationären Größen):<br />
<br />
m B<br />
1<br />
<br />
sTN<br />
• Drehzahl n steigt linear an ⇒ Beschleunigungsmoment mB∞ ist konstant.<br />
Mit Nennfluß ψ = 1 ist der Ankerstrom iA∞ = mB∞ + mW ebenfalls konstant.<br />
• Soll–Ankerspannung u ∗ A∞ als Ausgang des P I–Stromreglers ist daher konstant.<br />
⇒ Eingang des Reglers iAd∞ ist Null; Umformung ergibt i ∗ A∞ = iA∞.<br />
• Die Drehzahldifferenz nd∞ ergibt sich schließlich zu:<br />
nd∞ = i∗ A∞<br />
VRn<br />
= 1<br />
(mB∞ + mW )<br />
VRn<br />
n














