Kapitel 6 (fast komplett) - homepages.uni-regensburg.de
Kapitel 6 (fast komplett) - homepages.uni-regensburg.de
Kapitel 6 (fast komplett) - homepages.uni-regensburg.de

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
6 Gewöhnliche Differentialgleichungen<br />
6.1 Einleitung<br />
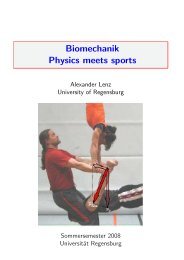
6.1.1 Einführen<strong>de</strong>s Beispiel: Die Traktrix<br />
Wir leiten dieses <strong>Kapitel</strong> durch ein Beispiel ein. Das eine En<strong>de</strong> eines gestreckten Fa<strong>de</strong>ns<br />
<strong>de</strong>r Länge L wer<strong>de</strong> auf einer horizontalen Tischplatte entlang einer Gera<strong>de</strong>n (x-Achse)<br />
gezogen. Auf welcher Kurve y = y(x) (“Schleppkurve” o<strong>de</strong>r “Traktrix”) wird ein am<br />
an<strong>de</strong>ren Fa<strong>de</strong>nen<strong>de</strong> befestigtes Gewichtstück nachgezogen, wenn dieses sich zu Beginn an<br />
einer gegebenen Position (x, y) = (0, a), mit |a| ≤ L, befin<strong>de</strong>t ?<br />
y(x)<br />
a<br />
y(x1)<br />
x1<br />
x2<br />
Zu einem beliebigen Punkt (x1, y(x1)) auf <strong>de</strong>r Kurve, mit x1 > 0 liegt das ziehen<strong>de</strong><br />
Fa<strong>de</strong>nen<strong>de</strong> auf <strong>de</strong>r x-Achse bei x = x2 > x1, wobei nach Pythagoras gilt<br />
y(x1) 2 + (x2 − x1) 2 = L 2<br />
⇒ x2 − x1 = L 2 − y(x1) 2 . (347)<br />
An<strong>de</strong>rerseits bil<strong>de</strong>t <strong>de</strong>r ziehen<strong>de</strong> Fa<strong>de</strong>n gera<strong>de</strong> die Tangente an die Kurve im Punkt<br />
(x1, y(x1)). Die entsprechen<strong>de</strong> Tangentensteigung ist daher gegeben durch<br />
y ′ (x1) = − y(x1)<br />
x2 − x1<br />
x<br />
, (348)<br />
worin y ′ (x) die Ableitung <strong>de</strong>r gesuchten Funktion y(x) bezeichnet. Es folgt also<br />
y ′ y(x)<br />
(x) = −<br />
, (349)<br />
L2 − y(x) 2<br />
worin wir x1 durch x ersetzt haben. Diese Beziehung muß für alle x > 0 erfüllt sein. Sie<br />
stellt aber auch, wie wir in Abschnitt 6.2.1 sehen wer<strong>de</strong>n, eine hinreichen<strong>de</strong> Bedingung<br />
zur ein<strong>de</strong>utigen Bestimmung <strong>de</strong>r unbekannten Funktion y(x) dar, sofern die Anfangsbedingung<br />
y(0) = a, mit einer fest vorgegebenen Zahl a mit |a| < L, bekannt ist.<br />
60
6.1.2 Allgemeine Definition<br />
Gl. (349) ist eine sog. Differentialgleichung, da sie eine Beziehung zwischen einer gesuchten<br />
Funktion y(x) und <strong>de</strong>ren Ableitung y ′ (x) herstellt. Aus eben diesem Grund kann man<br />
die gesuchte Funktion y(x) nicht einfach durch algebraisches “Auflösen nach y” fin<strong>de</strong>n.<br />
Ehe wir Lösungsverfahren besprechen wer<strong>de</strong>n, wollen wir zunächst Grundbegriffe klären.<br />
Während gewöhnliche Gleichungen, wie etwa die quadratischen Gleichung<br />
x 2 + 4x + 13 = 0, (350)<br />
Zahlen als Lösungen haben (hier: x1,2 = −2 ± 3 i ), wird eine Differentialgleichung (DGl)<br />
durch Funktionen gelöst. Unter einer DGl versteht man allgemein eine Beziehung zwischen<br />
einer unbekannten (gesuchten) Funktion und einer o<strong>de</strong>r mehrerer ihrer Ableitungen.<br />
Bsp.: Hier ist eine DGl für die unbekannte Funktion y(x),<br />
y ′′ (x) + 4y ′ (x) + 13y(x) = 0. (351)<br />
Ihre Lösungsmenge ist eine Funktionenschar (mit zwei Scharparametern a und b),<br />
<br />
L = y(x) = a cos(3x) + b sin(3x) e −2x<br />
<br />
<br />
a, b ∈ R . (352)<br />
Da in dieser DGl neben <strong>de</strong>r gesuchten Funktion y(x) auch <strong>de</strong>ren Ableitungen y ′ (x) und<br />
y ′′ (x) auftreten, kann sie nicht einfach nach <strong>de</strong>r Unbekannten y(x) “aufgelöst” wer<strong>de</strong>n,<br />
son<strong>de</strong>rn erfor<strong>de</strong>rt ein beson<strong>de</strong>res Lösungsverfahren.<br />
Def.: Eine DGl heißt gewöhnlich, wenn die Unbekannte eine Funktion y(x) von nur einer<br />
Variable x ist. Eine gewöhnliche DGl heißt von n-ter Ordnung, wenn y (n) (x) die höchste<br />
in ihr auftreten<strong>de</strong> Ableitung von y(x) ist. Gl. (351) ist also eine DGl zweiter Ordnung.<br />
Dagegen ist die Gleichung <strong>de</strong>r Traktrix von erster Ordnung.<br />
Bem.: Ist die Unbekannte einer DGl eine Funktion von mehreren Variablen, so spricht<br />
man von einer partiellen DGl. Ein Beispiel ist die Wellengleichung<br />
1<br />
c2 ∂2y(x, t)<br />
∂t2 6.1.3 Zwei beson<strong>de</strong>rs einfache, aber wichtige DGlen<br />
= ∂2y(x, t)<br />
∂x2 . (353)<br />
Bevor wir uns systematischen Lösungsverfahren zuwen<strong>de</strong>n, sollen zwei wichtige DGlen,<br />
<strong>de</strong>ren Lösungsmengen leicht zu erraten sind, vorweggenommen wer<strong>de</strong>n. Es han<strong>de</strong>lt sich<br />
um lineare DGlen mit konstanten Koeffizienten, siehe Abschnitt 6.4.4.<br />
61
Eine DGl erster Ordnung für die gesuchte Funktion N(t) ist die Wachstumsgleichung,<br />
˙N(t) = λN(t) (λ > 0). (354)<br />
Die Variable t ist meistens die Zeit. (Ableitungen nach t wer<strong>de</strong>n mit einem Punkt bezeichnet.)<br />
Die sog. Wachstumskonstante λ muß aus Dimensionsgrün<strong>de</strong>n die Einheit s −1 haben.<br />
Die allgemeine Lösung dieser DGl lautet<br />
N(t) = N0e λt<br />
(N0 ∈ R). (355)<br />
Wie es sein muss, ist <strong>de</strong>r Exponent λt für je<strong>de</strong>n Wert von t eine dimensionslose Zahl.<br />
N(t) könnte etwa die (näherungsweise als kontinuierlich angenommene) Anzahl <strong>de</strong>r<br />
Individuen einer Bakterienkolonie sein, die sich ungehin<strong>de</strong>rt vermehren kann. Dann ist<br />
die frei wählbare Integrationskonstante N0 gleich <strong>de</strong>r Anzahl <strong>de</strong>r Individuen zur Zeit t = 0,<br />
und die Wachstumsgleichung bringt das Gesetz zum Ausdruck, daß die Wachstumsrate<br />
˙N(t) stets <strong>de</strong>r momentanen Population N(t) proportional ist. Dann isi T = 1 gera<strong>de</strong> die<br />
λ<br />
Zeit, während <strong>de</strong>r sich die Population um <strong>de</strong>n Faktor e ≈ 2.72 vermehrt.<br />
Das Zerfallsgesetz ergibt sich, wenn man ein Minuszeichen einführt,<br />
˙N(t) = −λN(t) (λ > 0) ⇒ N(t) = N0e −λt<br />
Die mittlere Lebensdauer τ ergibt sich aus<br />
τ = 1<br />
∞ ∞<br />
dt N(t) = dt e −λt −λt e<br />
∞ =<br />
λ 0<br />
N0<br />
0<br />
0<br />
(N0 ∈ R).. (356)<br />
= 1<br />
. (357)<br />
λ<br />
Eine DGl zweiter Ordnung für die gesuchte Funktion x(t) ist die Oszillatorgleichung,<br />
m¨x(t) = −kx(t) (k > 0), (358)<br />
mit <strong>de</strong>r Masse m und <strong>de</strong>r Kraftkonstante k (Einheit: N/m = kg/s 2 ). Mit <strong>de</strong>r Frequenz<br />
ω = k/m (359)<br />
ist die allgemeine Lösung <strong>de</strong>r Oszillatorgleichung gegeben durch<br />
x(t) = a cos(ωt) + b sin(ωt) ≡ A cos(ωt − φ) (a, b ∈ R), (360)<br />
mit zwei frei wählbaren Integrationskonstanten a = A cosφ und b = A sin φ. Damit lassen<br />
sich die Anfangsbedingungen x(0) = x0 und ˙x(0) = v0 erfüllen,<br />
a = x0, b = v0<br />
. (361)<br />
ω<br />
Die DGl <strong>de</strong>r Traktrix ist nicht von dieser einfachen Sorte. Sie läßt sich aber auch mit<br />
einem einfachen Verfahren lösen, das wir jetzt behan<strong>de</strong>ln wer<strong>de</strong>n.<br />
62
6.2 DGlen erster Ordnung: Trennung <strong>de</strong>r Variablen<br />
Viele DGlen erster Ordnung lassen sich durch “Trennung <strong>de</strong>r Variablen” lösen. Dieses<br />
Verfahren wird hier am Beispiel <strong>de</strong>r Traktrix-Gleichung erläutert. Zwei weitere Anwendungsbeispiele<br />
folgen. (Als Gegenbeispiel, das diesem Verfahren nicht zugänglich ist,<br />
erwähnen wir die inhomogenen linearen DGlen erster Ordnung aus Abschnitt 6.4.2.)<br />
6.2.1 Lösung <strong>de</strong>r Traktrix-Gleichung<br />
Die spezielle DGl <strong>de</strong>r Traktrix besitzt die allgemeine Form<br />
f y(x) y ′ (x) = g(x), (362)<br />
mit zwei vorgegebenen Funktionen f(y) und g(x), hier<br />
<br />
a2 − y2 f(y) = ,<br />
y<br />
g(x) ≡ −1. (363)<br />
Gl. (362) heißt eine DGl mit getrennten Variablen. Sei nämlich f(y) = F ′ (y) und g(x) =<br />
G ′ (x). Dann ist y(x) offenbar eine Lösung <strong>de</strong>r DGl (362), wenn gilt<br />
F y(x) = G(x) + C (C ∈ R, beliebig). (364)<br />
Ist F(y) zu<strong>de</strong>m explizit invertierbar, so folgt direkt<br />
y(x) = F −1 G(x) + C <br />
(C ∈ R). (365)<br />
Dies ist eine ganze Schar (mit C als Parameter) von Lösungen <strong>de</strong>r DGl (362)!<br />
Bsp. 1: Für die DGl <strong>de</strong>r Traktrix haben wir die Stammfunktionen<br />
F(y) = a ln a + a 2 − y 2<br />
y<br />
− a 2 − y 2 , G(x) = −x. (366)<br />
Die Funktion F(y) ist zwar nicht explizit invertierbar, aber die inverse Funktion existiert,<br />
und man kann die exakte Lösung graphisch darstellen.<br />
Merkregel (Trennung <strong>de</strong>r Variablen): Läßt sich eine DGl auf die Form<br />
bringen [wobei y ′ (x) = dy<br />
dx<br />
f(y) dy = g(x) dx (367)<br />
formal als Quotient behan<strong>de</strong>lt wird], dann erhält man durch<br />
formale Integration bei<strong>de</strong>r Seiten<br />
F(y) + C1 = G(x) + C2 ⇒ y = F −1 <br />
G(x) + C1 + C2 <br />
C<br />
(368)<br />
63
6.2.2 Spiralbahn im klassischen Mo<strong>de</strong>ll <strong>de</strong>s Wasserstoffatoms<br />
Im klassischen Mo<strong>de</strong>ll <strong>de</strong>s Wasserstoffatoms wür<strong>de</strong> das Elektron (mit Masse m und<br />
Ladung −e) auf einer Kreisbahn mit gegebenem Radius r mit jener Geschwindigkeit<br />
v = v(r) um das Proton laufen, bei <strong>de</strong>r sich Zentrifugal- und Zentripetalkraft gera<strong>de</strong><br />
kompensieren. Mehr als v interessiert hier <strong>de</strong>r Betrag a = a(r) <strong>de</strong>s daraus resultieren<strong>de</strong>n,<br />
zum Kreiszentrum hin weisen<strong>de</strong>n Vektors a <strong>de</strong>r (Zentripetal-) Beschle<strong>uni</strong>gung,<br />
a(r) ≡ v2 |FCoul| 1 e<br />
= ≡<br />
r m 4πǫ0<br />
2<br />
mr2. (369)<br />
Als beschle<strong>uni</strong>gte Ladung müsste dieses Elektron ständig elektromagnetische Wellen aussen<strong>de</strong>n.<br />
Nach <strong>de</strong>r Larmor-Formel betrüge die abgestrahlte Leistung<br />
P(r) ≡ 1 2e<br />
4πǫ0<br />
2<br />
3c2 a(r)2 1<br />
=<br />
(4πǫ0) 3<br />
2e6 3m2c3 1<br />
r4. (370)<br />
Mit dieser Rate müsste die gesamte (kinetische plus potentielle) Energie <strong>de</strong>s Elektrons,<br />
E(r) = m<br />
2 v2 − 1 e<br />
4πǫ0<br />
2<br />
r<br />
1 e<br />
= −<br />
4πǫ0<br />
2<br />
, (371)<br />
2r<br />
kontinuierlich abnehmen. Als Folge wür<strong>de</strong> auch <strong>de</strong>r Bahnradius r abnehmen, r = r(t),<br />
mit Ableitung ˙r(t) < 0. Für <strong>de</strong>n Bohr-Radius r = rB = 4πǫ0 e2 schätzen wir die während<br />
c<br />
abgestrahlte Energie ∆E ab durch<br />
einer entsprechen<strong>de</strong>n Umlaufszeit T(rB) = 2πrB<br />
v(rB)<br />
∆E ≈ P(rB) T(rB) = 4π<br />
3<br />
(Hier ist α = e2 /4πǫ0(c) ≈ 1<br />
137<br />
α2 (c/rB) 3<br />
(mc 2 ) 2 = 10−17 eV ≪ E(rB) . (372)<br />
die Feinstrukturkonstante.) Da dies nur ein winziger<br />
Bruchteil <strong>de</strong>r Gesamtenergie E(rB) = −13.6 eV ist, ist zu erwarten, daß die Abnahme<br />
<strong>de</strong>s Bahnradius pro Umlauf sehr gering, die Bahn also sehr gut durch eine Kreisbahn mit<br />
kontinuierlich aber langsam abnehmen<strong>de</strong>m Radius r(t) angenähert wird. Wir setzen also<br />
P r(t) = − d<br />
dt E r(t) ≡ −E ′ r(t) ˙r(t) ≡ − 1<br />
4πǫ0<br />
e2 ˙r(t). (373)<br />
2r(t) 2<br />
Hier haben wir die Ableitung E ′ (r) <strong>de</strong>r Funktion (371) eingesetzt. Mit Gl. (370) wird<br />
daraus eine gewöhnliche DGl für die gesuchte Funktion r(t),<br />
˙r(t) = − b<br />
r(t) 2,<br />
b :=<br />
1<br />
(4πǫ0) 2<br />
4e 4<br />
3m 2 c<br />
3 = 3.17 × 10−21m3<br />
Nach Trennung <strong>de</strong>r Variablen, r 2 dr = −b dt, ergibt Integration<br />
s<br />
. (374)<br />
r 3<br />
3 + C1 = −bt + C2 ⇒ r(t) = 3(C2 − C1) − bt ≡ b(tf − t). (375)<br />
Die Integrationskonstante tf wird festgelegt durch <strong>de</strong>n Anfangswert r(0) = rB,<br />
tf = r3 B<br />
b = 5 × 10−11 s. (376)<br />
So lange dauert in dieser Näherung <strong>de</strong>r Sturz <strong>de</strong>s klassischen Elektrons in <strong>de</strong>n Kern.<br />
64
6.2.3 Die Kettenlinie<br />
Ein Seil <strong>de</strong>r Länge L sei zwischen zwei Punkten mit horizontalem Abstand B und vertikalem<br />
Abstand H aufgehängt (L 2 > H 2 + B 2 ). Welche Funktion y(x) beschreibt das<br />
durchhängen<strong>de</strong> Seil? (x-Achse horizontal und y-Achse vertikal nach oben.)<br />
Auf ein kurzes (leicht gekrümmtes) Seilstück <strong>de</strong>r Länge δs ≪ L, mit Schwerpunkt bei<br />
x = x0 und Endpunkten bei x = x1,2, wirken drei Kräfte: Im Schwerpunkt, senkrecht<br />
nach unten, seine Gewichtskraft G und an <strong>de</strong>n Endpunkten, jeweils in tangentialer Rich-<br />
tung, Zugkräfte F1 bzw. F2. Da die Vektorsumme aller Kräfte verschwin<strong>de</strong>n muß, gilt<br />
<br />
0<br />
−Fx<br />
Fx<br />
G = , F1 = , F2 = . (377)<br />
−γδs<br />
−Fy<br />
Fy + γδs<br />
γ ist die Wichte (Gewicht pro Längeneinheit) <strong>de</strong>s Seils.<br />
|Fx| ist die an je<strong>de</strong>r Stelle <strong>de</strong>s Seils gleich große Horizontalkomponente <strong>de</strong>r Seilspannung.<br />
Da die Zugkräfte tangential an <strong>de</strong>n En<strong>de</strong>n <strong>de</strong>s Seilstücks angreifen, folgt<br />
y ′ (x1) = Fy<br />
, y ′ (x2) = Fy + γδs<br />
, (378)<br />
Mit δs → 0 gelten: x1 → x0 − 0 und x2 → x0 + 0. Daher folgt weiter<br />
Fx<br />
y ′′ y<br />
(x0) := lim<br />
δs→0<br />
′ (x2) − y ′ (x1)<br />
=<br />
x2 − x1<br />
γ<br />
Fx<br />
Fx<br />
lim<br />
δs→0<br />
δs<br />
x2 − x1<br />
. (379)<br />
Mit δs → 0 wird die Krümmung <strong>de</strong>s Seilstücks vernachlässigbar und nach Pythagoras gilt<br />
δs → (δx) 2 + (δy) 2 → δx 1 + y ′ (x0) 2 ⇒ x2 − x1 ≡ δx →<br />
δs<br />
1 + y ′ (x0) 2.(380)<br />
Kombination <strong>de</strong>r bei<strong>de</strong>n letzten Beziehungen liefert (mit x0 =: x) die DGl <strong>de</strong>r Kettenlinie,<br />
y ′′ (x) = a 1 + y ′ (x) 2 , a := γ<br />
Fx<br />
. (381)<br />
Sie ist eine gewöhnliche DGl erster Ordnung für die Funktion η(x) := y ′ (x). Trennung<br />
<strong>de</strong>r Variablen, dη/ 1 + η 2 = a dx, und Integration (mit Integrationskonstante C) ergibt<br />
arcsinh(η) = a(x − C), C ∈ R. (382)<br />
Inversion, η(x) = sinh(a(x − C)) ≡ y ′ (x), und erneute Integration ergibt schließlich<br />
y(x) = 1<br />
a cosh a(x − C) + C ′ , C, C ′ ∈ R. (383)<br />
Die Integrationskonstante C ′ legt <strong>de</strong>n Nullpunkt <strong>de</strong>r y-Achse fest, spielt also keine Rolle.<br />
C und die horizontale Seilspannung Fx = a/γ ergeben sich aus <strong>de</strong>n bei<strong>de</strong>n Gleichungen<br />
L =<br />
B<br />
δs = dx<br />
0<br />
1 + y ′ (x) 2 = 1<br />
B<br />
dxy<br />
a 0<br />
′′ (x) = y′ (B) − y ′ (0)<br />
,<br />
a<br />
(384)<br />
H = y(B) − y(0). (385)<br />
65
6.3 Eindimensionale Bewegungsgleichungen<br />
6.3.1 Definition<br />
Bewegt sich ein Punktteilchen <strong>de</strong>r Masse m längs einer vorgegebenen glatten Kurve, so ist<br />
seine (von einem willkürlich gewählten Anfangspunkt an) entlang <strong>de</strong>r Kurve gemessene<br />
Bogenlänge s eine zweimal differenzierbare Funktion s(t) <strong>de</strong>r Zeit t. Die zweite Ableitung<br />
¨s(t) heißt die (Tangential-) Beschle<strong>uni</strong>gung <strong>de</strong>s Teilchens entlang <strong>de</strong>r Kurve. Nach <strong>de</strong>m<br />
Zweiten Newtonschen Gesetz gilt zu je<strong>de</strong>r Zeit t die sog. Bewegungsgleichung (BGl)<br />
m¨s(t) = F(t), (386)<br />
wobei F(t) die Tangential-Komponente <strong>de</strong>r zur Zeit t auf das Teilchen wirken<strong>de</strong>n Kraft<br />
F(t) (in positiver s-Richtung entlang <strong>de</strong>r Kurve) ist.<br />
Ist die Funktion F(t) von vorneherein bekannt, so fin<strong>de</strong>t man die gesuchte Bewegungsfunktion<br />
s(t) <strong>de</strong>s Teichens durch zwei elementare Integrationen,<br />
t<br />
˙s(t) = v0 +<br />
t0<br />
dτ 1<br />
m F(τ), s(t) = s0 +<br />
t<br />
dτ ˙s(τ). (387)<br />
Die Anfangswerte s0 := s(t0) bzw. v0 := ˙s(t0) für Ort und Geschwindigkeit zum Anfangszeitpunkt<br />
t = t0 sind frei wählbare Integrationskonstanten. Als Beispiel betrachten<br />
wir ein Teilchen mit Masse m und Ladung q (im schwerelosen Raum) zwischen <strong>de</strong>n Platten<br />
eines Kon<strong>de</strong>nsators mit vorgegebenem zeitlich variieren<strong>de</strong>n Feld E(t) = E0 cos(ωt).<br />
Bewegt sich das Teilchen in x-Richtung (senkrecht zu <strong>de</strong>n Platten), so lautet seine BGl<br />
t0<br />
m¨x(t) = qE0 cos(ωt). (388)<br />
Durch direkte Integration fin<strong>de</strong>t man ihre allgemeine Lösung,<br />
x(t) = x0 + v0t − qE0<br />
cos(ωt). (389)<br />
mω2 In <strong>de</strong>n meisten Fällen ist aber die Funktion F(t) nicht von vorneherein bekannt. Dann<br />
stellt die Bewegungsgleichung eine echte DGl dar. Dies soll ein Beispiel <strong>de</strong>monstrieren.<br />
Bsp. (Fa<strong>de</strong>npen<strong>de</strong>l): Eine Punktmasse m sei im Schwerefeld <strong>de</strong>r Er<strong>de</strong> an einem Fa<strong>de</strong>n<br />
<strong>de</strong>r Länge ℓ aufgehängt und führe Pen<strong>de</strong>lschwingungen in <strong>de</strong>r xz-Ebene aus (z-Richtung<br />
nach oben). Die Bahn <strong>de</strong>r Mase m ist offenbar eine vertikale Kreislinie in <strong>de</strong>r xz-Ebene<br />
mit Radius ℓ. Der Gleichgewichtslage (also <strong>de</strong>m tiefstem Punkt) dieser Bahn wählen<br />
wir als Nullpunkt <strong>de</strong>r Bogenlänge s. Ist das Pen<strong>de</strong>l um <strong>de</strong>n Winkel φ aus <strong>de</strong>r Verikalen<br />
ausgelenkt, so befin<strong>de</strong>t sich die Masse bei <strong>de</strong>r Bogenlänge s = ℓφ (mit φ, s > 0 für x > 0).<br />
66
z<br />
m<br />
Die Komponente F(t) <strong>de</strong>r auf die Masse einwirken<strong>de</strong>n Kraft in Richtung tangential<br />
zur Bahn ist die entsprechen<strong>de</strong> Komponente <strong>de</strong>r Gewichtskraft G = −mgez,<br />
x<br />
F(t) = −mg sin φ ≡ −mg sin s<br />
. (390)<br />
ℓ<br />
(Außer G wirkt zwar auch eine Seilzugkraft auf das Teilchen, doch die trägt nicht zur<br />
tangentialen Komponente <strong>de</strong>r Gesamtkraft bei.) F(t) ist also nicht explizit als Funktion<br />
von t gegeben, son<strong>de</strong>rn implizit als Funktion F(s) <strong>de</strong>r zeitabhängigen Bogenlänge s = s(t),<br />
F(t) = F s(t) , F(s) = −mg sin s<br />
. (391)<br />
ℓ<br />
Um also die rechte Seite F(t) <strong>de</strong>r Bewegungsgleichung explizit angeben zu können, müsste<br />
man <strong>de</strong>ren Lösung s(t) bereits kennen! Sie ist jetzt also eine echte DGl.<br />
m¨s(t) = −mg sin s(t)<br />
. (392)<br />
ℓ<br />
Sie muß von <strong>de</strong>r gesuchten Funktion s(t) und ihrer zweiten Ableitung ¨s(t) zu je<strong>de</strong>r Zeit t<br />
erfüllt sein. Wir wer<strong>de</strong>n diese DGl zweiter Ordnung im folgen<strong>de</strong>n Abschnitt lösen.<br />
Def.: Unter <strong>de</strong>r Bewegungsgleichung (BGl) eines Teilchens versteht man die DGl<br />
m¨s(t) = F s(t), ˙s(t), t ≡ F(t). (393)<br />
Dabei ist F(t) die Komponente <strong>de</strong>r auf das Teilchen zur Zeit t wirken<strong>de</strong>n Kraft tangential<br />
zur Bahn (in positiver s-Richtung). Sie ist selten als explizite Funktion F(t) = F(t)<br />
<strong>de</strong>r Zeit t gegeben. Meistens ist sie eine Funktion F(t) = F(s(t)) <strong>de</strong>s Ortes s = s(t),<br />
gelegentlich eine Funktion F(t) = F(s(t), t), die explizit von Ort s und Zeit t abhängt.<br />
Ein wichtiger Son<strong>de</strong>rfall ist eine (zusätzliche) explizite Abhängigkeit F(t) = F(s(t), ˙s(t), t)<br />
von <strong>de</strong>r Geschwindigkeit ˙s(t), siehe Abschnitt 6.3.3.<br />
67
Bem.: Ehe wir die exakte Lösung <strong>de</strong>r BGl <strong>de</strong>s Fa<strong>de</strong>npen<strong>de</strong>ls untersuchen, wollen wir sie<br />
im Grenzfall kleiner Auslenkungen |s(t)| ≪ ℓ näherungsweise lösen. In diesem Fall gilt<br />
sin s(t)<br />
ℓ<br />
s(t)<br />
≈ , (394)<br />
ℓ<br />
und wir erhalten die lineare DGl m¨s(t) = −mgs(t)/ℓ bzw.<br />
¨s(t) = −ω 2 s(t),<br />
<br />
g<br />
ω := ,<br />
ℓ<br />
(395)<br />
mit <strong>de</strong>r Lösung s(t) = A cos(ωt) (A ≪ ℓ). Die Schwingungsperio<strong>de</strong><br />
T = 2π<br />
<br />
ℓ<br />
= 2π<br />
ω g<br />
(396)<br />
ist in diesem Grenzfall unabhängig von <strong>de</strong>r Amplitu<strong>de</strong> A. Dies ist bei größeren Amplitu<strong>de</strong>n<br />
nicht <strong>de</strong>r Fall. Im Grenzfall A → πℓ, wenn das Pen<strong>de</strong>l (<strong>de</strong>ssen Fa<strong>de</strong>n durch einen starren,<br />
gewichtslosen Stab ersetzt ist) zu Beginn nahezu senkrecht nach oben zeigt, gilt sogar<br />
T → ∞.<br />
6.3.2 Energieerhaltung<br />
Bewegungsgleichungen sind DGlen zweiter Ordnung für die gesuchte Bewegungsfunktion<br />
s(t). Häufig lassen sie sich jedoch auf eine DGl erster Ordnung für s(t) zurückführen.<br />
Dies ist immer dann <strong>de</strong>r Fall, wenn die Kraft eine explizite Funktion nur <strong>de</strong>s Orts s ist,<br />
F(t) = F(s(t)). (397)<br />
Die bis auf eine willkürliche Konstante V (s0) festgelegte negative Stammfunktion V (s),<br />
s<br />
V (s) = V (s0) −<br />
s0<br />
d s ′ F(s ′ ) ⇔ F(s) = − d<br />
ds V (s) ≡ −V ′ (s), (398)<br />
heißt in diesem Fall die (ortsabhängige) potentielle Energie <strong>de</strong>s Teilchens am Ort s seiner<br />
Bahn. Um ihre Be<strong>de</strong>utung zu erkennen, berechnen wir die zeitliche Ableitung dieser<br />
Größe während das Teilchen sich bewegt,<br />
d<br />
dt V s(t) = V ′ s(t) ˙s(t) = −F s(t) ˙s(t). (399)<br />
Hier wur<strong>de</strong> im ersten Schritt die Kettenregel und im zweiten die Definition <strong>de</strong>r Funktion<br />
V (s) benutzt. Mit <strong>de</strong>r Bewegungsgleichung, F s(t) = m¨s(t), folgt schließlich<br />
d<br />
dt V s(t) = −m¨s(t) ˙s(t) ≡ d<br />
<br />
−<br />
dt<br />
m<br />
2 ˙s(t)2<br />
<br />
. (400)<br />
68
Dieses Ergebnis besagt offenbar, daß die Größe<br />
E := V s(t) + m<br />
2 ˙s(t)2 = const, (401)<br />
genannt die mechanische (Gesamt-) Energie <strong>de</strong>s Teilchens, während seiner Bewegung<br />
zeitlich konstant bleibt. Der geschwindigkeitsabhängige, “nicht-potentielle”, Teil davon<br />
heißt seine kinetische Energie,<br />
Ekin := m<br />
2 ˙s2 ≡ m<br />
2 v2 ≡ Ekin(˙s). (402)<br />
An<strong>de</strong>rs als die Masse m, die Geschwindigkeit v, etc. ist die Energie E keine anschauliche,<br />
“direkt meßbare” Größe. Sie wird nur <strong>de</strong>shalb thematisiert, weil für sie <strong>de</strong>r soeben<br />
aufgezeigte Erhaltungssatz gilt. Sie ist eine Konstante <strong>de</strong>r Bewegung.<br />
Der Nutzen <strong>de</strong>r Konstante E wird klar, wenn wir Gl. (401) nach ˙s(t) auflösen,<br />
<br />
2<br />
<br />
˙s(t) = E − V<br />
m<br />
s(t) <br />
. (403)<br />
Dies ist eine DGl erster Ordnung für s(t), die durch Trennung <strong>de</strong>r Variablen lösbar ist,<br />
dt =<br />
2<br />
m<br />
ds<br />
⇒ t =<br />
E − V (s)<br />
m<br />
2<br />
Bsp.: Im Fall <strong>de</strong>s Fa<strong>de</strong>npen<strong>de</strong>ls aus Abschnitt 6.3.1 haben wir<br />
F(s) = −mg sin s<br />
ℓ<br />
s<br />
s0<br />
ds ′<br />
E − V (s ′ ) + t0. (404)<br />
⇒ V (s) = −mgℓ cos s<br />
. (405)<br />
ℓ<br />
Es gilt also V (s) = mgz, mit <strong>de</strong>r “Höhe“ z = ℓ cos(s/ℓ) <strong>de</strong>r Masse m im Schwerefeld<br />
(Ursprung <strong>de</strong>r xz-Ebene im Aufhängepunkt <strong>de</strong>s Pen<strong>de</strong>ls). Könnte man das Integral<br />
t1 =<br />
m<br />
2<br />
s1<br />
s0<br />
ds<br />
E + mgℓ cos s<br />
ℓ<br />
<br />
φ1 ℓ<br />
≡<br />
2g<br />
φ0<br />
dφ<br />
<br />
E + cosφ<br />
mgℓ<br />
(406)<br />
explizit auswerten, so erhielte man durch Inversion <strong>de</strong>r resultieren<strong>de</strong>n Stammfunktion die<br />
gesuchte Bewegungsfunktion s(t). Bei <strong>de</strong>r Maximalauslenkung φ = α = A/ℓ muß wegen<br />
V (A) = E <strong>de</strong>r Nenner <strong>de</strong>s Integran<strong>de</strong>n verschwin<strong>de</strong>n,<br />
E<br />
mgℓ = − cosα, t1<br />
<br />
=<br />
ℓ<br />
2g<br />
69<br />
φ1<br />
φ0<br />
dφ<br />
√ cosφ − cosα . (407)
Die Schwingungsperio<strong>de</strong> T ist das 4-fache <strong>de</strong>r Zeit zwischen Maximalauslenkung φ = α<br />
und anschließen<strong>de</strong>r Tiefstlage φ = 0,<br />
<br />
<br />
<br />
α<br />
ℓ dφ<br />
ℓ<br />
T(α) = 4 √ =: 2π ξ(α) . (408)<br />
2g cosφ − cosα g<br />
Für kleine Auslenkungen |φ| ≤ α ≪ π folgt mit cosx ≈ 1 − 1<br />
2 x2<br />
0<br />
0<br />
<br />
<br />
<br />
α<br />
ℓ dφ ℓ<br />
<br />
T(α) ≈ 4 = 4 arcsin<br />
g α2 − φ2 g<br />
φ<br />
<br />
α ℓ<br />
= 2π . (409)<br />
α 0 g<br />
Für α → 0 gilt also f(α) → 1. Für endliche α > 0 kann das Integral<br />
√ α<br />
2 dφ<br />
f(α) = √<br />
π cosφ − cos α<br />
0<br />
auf ein elliptisches Integral zurückgeführt wer<strong>de</strong>n. Eine numerische Auswertung ergibt<br />
(TABELLE)<br />
6.3.3 Dissipation<br />
(410)<br />
Unter Dissipation versteht man die Umwandlung von mechanischer Energie in Wärme.<br />
Ein einfaches Beispiel ist <strong>de</strong>r gedämpfte harmonische Oszillator, bei <strong>de</strong>m neben <strong>de</strong>r<br />
Rückstellkraft −kx(t) eine geschwindigkeits-proportionale Reibungskraft −γ ˙x(t) wirkt,<br />
Die resultieren<strong>de</strong> BGl,<br />
F(t) = −kx(t) − γ ˙x(t) = F x(t), ˙x(t) . (411)<br />
m¨x(t) + γ ˙x(t) + kx(t) = 0, (412)<br />
läßt sich nicht auf eine DGl erster Ordnung zurückführen.<br />
Im Gegensatz zur BGl <strong>de</strong>s Fa<strong>de</strong>npen<strong>de</strong>ls ist diese DGl aber linear und damit zugänglich<br />
für eine völlig an<strong>de</strong>re Lösungsmetho<strong>de</strong>.<br />
70
6.4 Lineare DGlen<br />
6.4.1 Allgemeine Definition<br />
Def.: Sei I = (x1, x2) ⊆ R ein offenes Intervall. Eine lineare DGl n-ter Ordnung für die<br />
gesuchte Funktion y : I → R, x ↦→ y(x) hat die Form<br />
y (n) n−1<br />
(x) + ak(x)y (k) (x) = b(x), (413)<br />
k=0<br />
mit reellwertigen und auf I stetigen Koeffizientenfunktionen ak(x) und b(x).<br />
Im Fall b(x) ≡ 0 heißt die lineare DGl homogen, an<strong>de</strong>rnfalls heißt sie inhomogen.<br />
Bsp.: Eine inhomogene ineare DGl dritter Ordnung ist etwa<br />
y ′′′ (x) + x 2 y ′′ (x) + sin x y ′ (x) + x 2 + 2x + 3 y(x) = √ x, (414)<br />
mit <strong>de</strong>n Koeffizientenfunktionen<br />
a2(x) = x 2 , a1(x) = sin x, a0(x) = x 2 + 2x + 3, b(x) = √ x. (415)<br />
Dagegen sind die drei folgen<strong>de</strong>n DGlen nicht linear,<br />
y ′ (x) + y(x) = 0, y ′ (x) 2 + y(x) = x, ¨s(t) + g sin s(t)<br />
ℓ<br />
= 0. (416)<br />
Bem.: Eine beson<strong>de</strong>re Eigenschaft homogener linearer DGlen ist:<br />
Sind die Funktionen y1(x) und y2(x) Lösungen, so ist auch je<strong>de</strong> Linearkombination<br />
y(x) = c1y1(x) + c2y2(x) (c1, c2 ∈ R), (417)<br />
mit beliebigen Konstanten c1, c2 ∈ R, eine Lösung.<br />
Sind dagegen y1,2(x) Lösungen einer inhomogenen linearen DGl, so ist die Differenz<br />
eine Lösung <strong>de</strong>r zugehörigen homogenen DGl.<br />
y(x) = y1(x) − y2(x) (418)<br />
Ehe wir das allgemeine Lösungsverhalten linearer DGlen untersuchen, wollen wir <strong>de</strong>n<br />
einfachsten Fall erster Ordnung geson<strong>de</strong>rt betrachten.<br />
71
6.4.2 Lineare DGlen erster Ordnung<br />
Eine lineare DGl erster Ordnung für die gesuchte Funktion y : I → R, x ↦→ y(x),<br />
y ′ (x) + a(x)y(x) = b(x), (419)<br />
hat zwei reellwertige auf I stetige Koeffizientenfunktionen a(x) und b(x).<br />
Im homogenen Fall b(x) ≡ 0 ist sie immer durch Trennung <strong>de</strong>r Variablen lösbar,<br />
dy<br />
dx<br />
= −a(x)y ⇒<br />
dy<br />
y<br />
= −a(x)dx. (420)<br />
Integriert man bei<strong>de</strong> Seiten <strong>de</strong>r letzten Gleichung und erhebt sie dann zur Potenz von e,<br />
so erhält man die Lösungsschar<br />
y(x) = c e −A(x)<br />
(c ∈ R), (421)<br />
Hier bezeichnet A(x) eine beliebige Stammfunktion <strong>de</strong>s Koeffizienten a(x),<br />
A ′ (x) = a(x). (422)<br />
Wie wir sehen wer<strong>de</strong>n, ist diese Schar bereits die vollständige Lösungsmenge.<br />
Bsp.: Der Koeffizient a(x) = − k<br />
x<br />
ergibt die homogene DGl<br />
y ′ (x) − k<br />
x y(x) = 0 ⇔ y′ (x) = k y(x)<br />
x<br />
(423)<br />
mit <strong>de</strong>r Lösungsmenge<br />
<br />
L = y(x) = ce k lnx ≡ c x k<br />
<br />
<br />
c ∈ R . (424)<br />
Eine ähnliche DGl ist<br />
mit <strong>de</strong>r Lösungsmenge<br />
L =<br />
y ′ (x) − kxy(x) = 0 (425)<br />
<br />
y(x) = c e k x2 /2<br />
<br />
<br />
c ∈ R . (426)<br />
Satz: Die allgemeine Lösung <strong>de</strong>r inhomogenen linearen DGl erster Ordnung ist<br />
y(x) = e −A(x)<br />
x<br />
c + dt b(t) e A(t)<br />
<br />
(c ∈ R), (427)<br />
Zum Beweis: Mit <strong>de</strong>r Produktregel sieht man direkt<br />
x0<br />
y ′ (x) = −a(x) y(x) + e −A(x) b(x) e A(x) = −a(x) y(x) + b(x), q.e.d. (428)<br />
Bem.: Gl. (427) wird auch als Variation <strong>de</strong>r Konstanten in Gl. (421) bezeichnet. Ersetzt<br />
man nämlich dort die Konstante c durch eine Funktion c(x) und for<strong>de</strong>rt, daß die<br />
resultieren<strong>de</strong> Funktion y(x) Lösung <strong>de</strong>r inhomogenen DGl mit b(x) = 0 wird, erhält man<br />
Gl. (427).<br />
72
6.4.3 Der Lösungsraum einer homogenen linearen DGl<br />
Def.: Ein Satz von n Funktionen fk : I → R, x ↦→ fk(x) (k = 1, ..., n) heißt linear<br />
abhängig, wenn diese eine nicht-trivale Darstellung <strong>de</strong>r Nullfunktion ermöglichen,<br />
c1f1(x) + ... + cnfn(x) = 0 ∀ x ∈ I,<br />
n<br />
|ck| > 0. (429)<br />
Satz: Die Lösungsmenge einer homogenen linearen DGl n-ter Ordnung bil<strong>de</strong>t einen ndimensionalen<br />
Vektorraum. M. a. W.: Sind n linear unabhängige Lösungen yk(x) bekannt<br />
(k = 1, ..., n), so ist die Gesamtheit aller Lösungen y(x) gegeben durch<br />
Bsp.:<br />
y(x) =<br />
k=1<br />
n<br />
ckyk(x) (c1, ..., cn ∈ R). (430)<br />
k=1<br />
Korollar: Ist y0(x) irgen<strong>de</strong>ine Lösung einer inhomogenen linearen DGl n-ter Ordnung,<br />
so ist die Gesamtheit aller Lösungen gegeben durch<br />
y(x) = y0(x) +<br />
n<br />
ckyk(x) (c1, ..., cn ∈ R), (431)<br />
k=1<br />
wobei y1(x), ..., yn(x) linear unabh. Lösungen <strong>de</strong>r zugehörigen homogenen DGl sind.<br />
Zum Beweis: Die Differenz zweier verschie<strong>de</strong>ner Lösungen <strong>de</strong>r inhomogenen DGl ist offenbar<br />
immer eine Lösung <strong>de</strong>r homogenen DGl!<br />
73
6.4.4 Lineare DGlen mit konstanten Koeffizienten<br />
Wir wollen hier die unabhängige Variable mit t (statt mit x) bezeichnen.<br />
Sind die Koeffizientenfunktionen ak(t) ≡ ak Konstanten,<br />
y (n) n−1<br />
(t) + aky (k) (t) = b(t), (432)<br />
so spricht man von einer linearen DGl mit konstanten Koeffizienten.<br />
(a) Vorbemerkung: Komplexe Funktionen einer reellen Variable<br />
k=0<br />
Mit zwei rellen Funktionen u, v : I → R wird durch<br />
y(t) = u(t) + i v(t) (433)<br />
eine komplexwertige Funktion y : I → C einer reellen Variable t ∈ I <strong>de</strong>finiert.<br />
Bem. 1: Interpretiert man t als die Zeit, so beschreibt y(t) <strong>de</strong>n Ortsvektor eines Punktes,<br />
<strong>de</strong>r sich durch die komplexe Zahlenebene “bewegt“ (SKIZZE).<br />
Sind u und v differenzierbar, mit <strong>de</strong>n Ableitungen ˙u(t) bzw. ˙v(t), so <strong>de</strong>finiert man<br />
y(t + ∆t) − y(t)<br />
˙y(t) := lim<br />
∆t→0<br />
<br />
∆t<br />
<br />
u(t + ∆t) + i v(t + ∆t) − u(t) + i v(t)<br />
= lim<br />
∆t→0<br />
= lim<br />
∆t→0<br />
<br />
∆t<br />
<br />
u(t + ∆t) − u(t) + i v(t + ∆t) − v(t)<br />
Entsprechend wird die k-te Ableitung von y(t) <strong>de</strong>finiert,<br />
∆t<br />
≡ ˙u(t) + i ˙v(t). (434)<br />
y (k) (t) := u (k) (t) + i v (k) (t). (435)<br />
Bem. 2: Die Zahl ˙y(t), ge<strong>de</strong>utet als Vektor in <strong>de</strong>r Zahlenebene, zeigt in Richtung tangential<br />
zur Bahnkurve im Punkt y(t). Der Betrag | ˙y(t)| entspricht genau <strong>de</strong>r Geschwindigkeit.<br />
Bsp.: Mit <strong>de</strong>r komplexen Konstanten µ = λ + i ω (λ, ω ∈ R) gilt<br />
y(t) := e µt = e λt e i ωt = e λt cos(ωt) + i sin(ωt) = u(t) + i v(t), (436)<br />
mit <strong>de</strong>n reellen Funktionen<br />
u(t) = e λt cos(ωt), v(t) = e λt sin(ωt). (437)<br />
74
Die entsprechen<strong>de</strong> Bahnkurve in <strong>de</strong>r Zahlenebene ist eine nach außen (λ > 0) o<strong>de</strong>r nach<br />
innen (λ < 0) gewun<strong>de</strong>ne Spirale um <strong>de</strong>n Ursprung. Die Ableitung dieser Funktion ist<br />
˙y(t) = ˙u(t) + i ˙v(t) = λu(t) − ωv(t) + i λv(t) + ωu(t) . (438)<br />
Man kann dafür auch schreiben<br />
d<br />
dt eµt = (λ + i ω) u(t) + i v(t) = µe µt . (439)<br />
Es gilt also die aus <strong>de</strong>m Reellen bekannte Ableitungsregel. Allgemein gilt<br />
(b) Homogene DGlen mit konstanten Koeffizienten<br />
y (k) (t) ≡ dk<br />
dt k eµt = µ k e µt . (440)<br />
Für eine homogene DGl mit reellen (konstanten) Koeffizienten ak,<br />
y (n) n−1<br />
(t) + aky (k) (t) = 0, (441)<br />
k=0<br />
sei eine komplexe Lösung y(t) = u(t) + i v(t) gegeben,<br />
n−1<br />
<br />
(n) (n) (k) (k)<br />
u (t) + i v (t) + ak u (t) + i v (t) = 0. (442)<br />
Wegen ak ∈ R ergibt Trennung von Real- und Imaginärteil die Gleichung<br />
<br />
u (n) n−1<br />
(t) +<br />
k=0<br />
k=0<br />
aku (k) <br />
(t) + i v (n) n−1<br />
(t) +<br />
k=0<br />
akv (k) <br />
(t) = 0. (443)<br />
Da die Terme in eckigen Klammern reell sind, müssen sie bei<strong>de</strong> einzeln verschwin<strong>de</strong>n.<br />
Der komplexe Ansatz liefert also zwei reelle Lösungen u(t) und v(t) <strong>de</strong>r homogenen DGl.<br />
Bsp. 1: Für die DGl<br />
machen wir <strong>de</strong>n komplexen Ansatz<br />
y(x) = e µt<br />
¨y(x) − 6 ˙y(x) + 34 y(x) = 0. (444)<br />
⇒ ˙y(t) = µe µt , ¨y(t) = µ 2 e µt . (445)<br />
Einsetzen in die DGl führt wegen e µt = 0 auf eine algebraische Gleichung für µ<br />
(µ 2 − 6µ + 34)e µt = 0 ⇔ µ 2 − 6µ + 34 = 0. (446)<br />
75
Mit <strong>de</strong>ren bei<strong>de</strong>n Lösungen<br />
erhalten wir zwei verschie<strong>de</strong>ne komplexe Lösungen <strong>de</strong>r DGl,<br />
y1(t) = e µ1t = e 3t cos(5t) + i sin(5t) ,<br />
µ1,2 = 3 ± 5 i (447)<br />
y2(t) = e µ1t = e 3t cos(−5t) + i sin(−5t) ≡ e 3t cos(5t) − i sin(5t) , (448)<br />
also drei verschie<strong>de</strong>ne reelle Lösungen,<br />
x1(t) = e 3t cos(5t), x2(t) = e 3t sin(5t), x3(t) = −e 3t sin(5t). (449)<br />
Wie es sein muß, können maximal zwei davon linear unabhängig sein, etwa {x1(t), x2(t)}.<br />
Daher ist die allgemeine reelle Lösung gegeben durch<br />
y(t) = c1x1(t) + c2x2(t) ≡ e 3t c1 cos(5t) + c2 sin(5t) <br />
(c1, c2 ∈ R). (450)<br />
Bem.: Dieses Beispiel läßt sich leicht verallgemeinern: Der komplexe Ansatz<br />
y(t) = e µt<br />
(µ = λ + i ω; λ, ω ∈ R) (451)<br />
führt durch Einsetzen in die homogene DGl n-ter Ordnung auf die algebraische Gleichung<br />
µ n + an−1µ n−1 + ... + a1µ + a0 = 0 (452)<br />
für die Unbekannte µ. Nach <strong>de</strong>m Fundamentalsatz <strong>de</strong>r Algebra hat diese Gleichung n<br />
(nicht notwendigerweise verschie<strong>de</strong>ne) Lösungen<br />
µk = λk + i ωk (λk, ωk ∈ R; k = 1, ..., n). (453)<br />
Durch Lösen einer algebraischen Gleichung fin<strong>de</strong>n wir also n (nicht notwendigerweise<br />
verschie<strong>de</strong>ne) komplexe Lösungen<br />
yk(t) = e µkt = uk(t) + i vk(t) (k = 1, ..., n), (454)<br />
und damit 2n (nicht notwendigerweise verschie<strong>de</strong>ne) reelle Lösungen <strong>de</strong>r homogenen DGl,<br />
uk(t) = e λkt cos(ωkt), vk(t) = e λkt sin(ωkt) (k = 1, ..., n). (455)<br />
Bil<strong>de</strong>n n dieser 2n reellen Lösungen einen linear unabhängigen Satz {x1(t), ..., xn(t)}, so<br />
ist die allgemeine Lösung <strong>de</strong>r DGl gegeben durch<br />
x(t) = c1x1(t) + ... + cnxn(t) (c1, .., cn ∈ R). (456)<br />
Ein Beispiel soll zeigen, daß dies nicht immer <strong>de</strong>r Fall ist.<br />
76
Bsp. 2: In <strong>de</strong>r DGl<br />
führt <strong>de</strong>r Ansatz y(t) = e µt auf die algebraische Gleichung<br />
¨y(t) − 4 ˙y(t) + 4 y(t) = 0 (457)<br />
µ 2 − 4µ + 4 ≡ (µ − 2) 2 = 0 ⇒ µ1 = µ2 = 2 (458)<br />
und liefert somit nur eine komplexe Lösung, die außer<strong>de</strong>m ”nur” reell ist,<br />
y1(t) = e 2t = x1(t). (459)<br />
Es muß also eine zweite reelle Lösung geben, die nicht von <strong>de</strong>r Form e λt ist. Durch Raten<br />
fin<strong>de</strong>t man<br />
und die allgemeine Lösung ist<br />
x2(t) = te 2t , (460)<br />
x(t) = c1x1(t) + c2x2(t) = (c1 + c2t)e 2t . (461)<br />
Bsp. 3 (Gedämpfter Oszillator): Wir betrachten die DGl<br />
mit <strong>de</strong>n dimensionsbehafteten Koeffizienten<br />
m¨y(t) + γ ˙y(t) + ky(t) = 0, (462)<br />
m = 0.5 kg, γ = 0.1 kg s −1 , k = 0.25 kg s −2 . (463)<br />
Entsprechend haben jetzt y, ˙y und ¨y die Dimensionen m, m s−1 bzw. m s−2 .<br />
Der Ansatz y(t) = y0e µt führt auf die Gleichung mµ 2 + γµ + k = 0, mit <strong>de</strong>n Lösungen<br />
µ1,2 = −γ ± γ 2 − 4km<br />
2m<br />
= − γ<br />
2m ±<br />
<br />
<br />
γ<br />
2 −<br />
2m<br />
k<br />
m<br />
= −λ ± i ω (464)<br />
und <strong>de</strong>n Werten λ = 0.1 s −1 und ω = 0.7 s −1 . Die allgemeine Lösung <strong>de</strong>r DGl ist<br />
y(t) = c1e µ1t + c2e µ2t = c1e i ωt + c2e − i ωt e −λt<br />
(c1, c2 ∈ C). (465)<br />
Real- und Imaginärteil je<strong>de</strong>r dieser Lösungen sind jeweils zwei reelle Lösungen.<br />
Als allgemeine reelle Lösung wählen wir (mit a, b ∈ R bzw. A, φ ∈ R)<br />
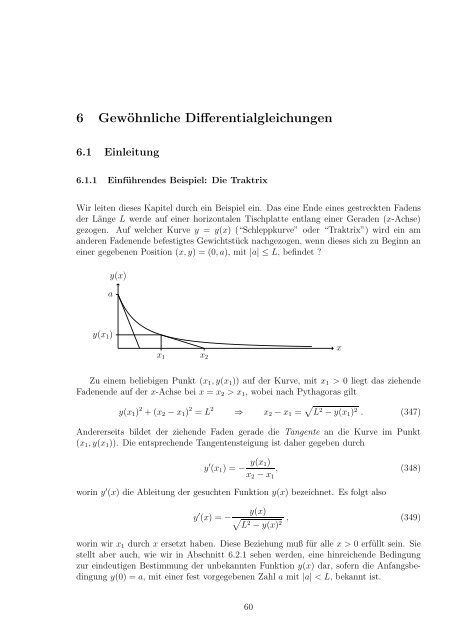
x(t) = a cos(ωt) + b sin(ωt) e −λt = A cos(ωt − φ)e −λt . (466)<br />
Dies ist eine gedämpfte, exponentiell abklingen<strong>de</strong> Schwingung.<br />
In <strong>de</strong>r folgen<strong>de</strong>n Abbildung ist φ = 0 und ω = 8λ.<br />
77
x(t)<br />
Für beliebige Werte <strong>de</strong>r Koeffizienten m, γ und k sind drei Fälle zu unterschei<strong>de</strong>n:<br />
1. Fall: γ 2 < 4km (Schwingfall), mit <strong>de</strong>r allgemeinen reellen Lösung<br />
x(t) = a cos(ωt) + b sin(ωt) e −λt = A cos(ωt − φ)e −λt<br />
t<br />
(A, φ ∈ R). (467)<br />
Abklingkonstante λ und (Kreis-) Frequenz ω sind gegeben durch<br />
λ = γ<br />
,<br />
2m<br />
<br />
k<br />
ω =<br />
m −<br />
<br />
γ<br />
2 .<br />
2m<br />
(468)<br />
2. Fall: γ 2 = 4km (aperiodischer Grenzfall), mit<br />
und <strong>de</strong>r einzigen Abklingkonstante<br />
3. Fall: γ 2 > 4km (Kriechfall), mit<br />
und <strong>de</strong>n bei<strong>de</strong>n Abklingkonstanten<br />
x(t) = a + bt e −λt<br />
x(t) = ae −λ1t + be −λ2t<br />
λ1 = − γ<br />
2m ±<br />
(a, b ∈ R) (469)<br />
λ = γ<br />
. (470)<br />
2m<br />
(a, b ∈ R) (471)<br />
<br />
<br />
γ<br />
2 −<br />
2m<br />
k<br />
. (472)<br />
m<br />
78
(c) Inhomogene DGlen<br />
Um die allgemeine Lösung <strong>de</strong>r inhomogenen DGl<br />
y (n) n−1<br />
(t) + aky (k) (t) = b(t) (473)<br />
k=0<br />
zu bestimmen, genügt es, eine einzige Lösung zu fin<strong>de</strong>n. Alle übrigen ergeben sich dann<br />
durch Addition <strong>de</strong>r aus Teil (b) bekannten allgemeinen Lösung <strong>de</strong>r zugehörigen homogenen<br />
DGl mit b(t) = 0. Wir beschränken uns auf eine Inhomogenität <strong>de</strong>r Form<br />
b(t) = A cos(Ωt) (A,Ω ∈ R), (474)<br />
<strong>de</strong>ren reelle Amplitu<strong>de</strong> A und Frequenz Ω beliebig vorgegeben sind.<br />
Bsp. 4 (Angetriebener, gedämpfter Oszillator): Eine physikalische DGl dieser Art<br />
ist die BGl <strong>de</strong>s (gedämpften) Oszillators mit periodischer Antriebskraft F cos(Ωt),<br />
m¨x(t) + γ ˙x(t) + kx(t) = F cos(Ωt) (F,Ω ∈ R). (475)<br />
Je<strong>de</strong> reelle Lösung x(t) dieser DGl ist <strong>de</strong>r Realteil einer komplexen Lösung w(t) von<br />
m ¨w(t) + γ ˙w(t) + kw(t) = Fe iΩt . (476)<br />
[ Den Imaginärteil y(t) von w(t) verwerfen wir, <strong>de</strong>nn er ist eine reelle Lösung von<br />
m¨y(t) + γ ˙y(t) + ky(t) = F sin(Ωt). ] (477)<br />
Wir machen nun für die komplexe DGl <strong>de</strong>n komplexen Lösungsansatz<br />
w(t) = Ce iΩt<br />
(C ∈ C, Ω ∈ R), (478)<br />
mit <strong>de</strong>r vorgegebenen Antriebsfrequenz Ω. Gesucht ist jetzt die komplexe Amplitu<strong>de</strong> C<br />
(die sich bei einer homogenen DGl herauskürzen wür<strong>de</strong>),<br />
Die physikalische Lösung, also <strong>de</strong>r Realteil von w(t),<br />
C = A + i B = |C|e −iΦ , (479)<br />
x(t) = Rew(t) = Re |C|e i(Ωt−Φ) = |C| cos(Ωt − Φ), (480)<br />
beschreibt eine Schwingung mit Amplitu<strong>de</strong> |C| > 0, die <strong>de</strong>m Antrieb um die Phase Φ<br />
hinterherhinkt. Wir wollen die Größen |C| und Φ als Funktionen <strong>de</strong>r Antriebsfrequenz Ω<br />
bestimmen.<br />
79
Mit <strong>de</strong>m Ansatz w(t) = Ce iΩt ergibt sich nach Division durch e iΩt<br />
− mΩ 2 + i γΩ + k C = F. (481)<br />
Die gesuchte komplexe Amplitu<strong>de</strong> ist also gegeben durch<br />
C =<br />
F<br />
(k − mΩ 2 ) + i γΩ ≡<br />
F<br />
a + i b<br />
= F(a − i b)<br />
a 2 + b 2 = |C|e−iΦ . (482)<br />
Für die reelle Amplitu<strong>de</strong> |C| und die Phase Φ <strong>de</strong>r erzwungenen Schwingung folgt<br />
|C| =<br />
F<br />
√ a 2 + b 2 =<br />
tanΦ ≡ − tan(−Φ) = − −b<br />
a<br />
F<br />
(k − mΩ 2 ) 2 + (γΩ) 2<br />
= b<br />
a =<br />
= F<br />
k<br />
γΩ<br />
= Γ<br />
k − mΩ2 1<br />
, (483)<br />
(1 − ξ2 ) 2 + (Γξ) 2<br />
ξ<br />
1 − ξ 2.<br />
Hier haben wir dimensionslose Varable für Frequenz Ω und Dämpfung γ eingeführt,<br />
(484)<br />
ξ := Ω<br />
k/m , Γ := γ<br />
√ km . (485)<br />
Im statischen Fall Ω = 0 ergibt sich statt einer Schwingung die konstante Auslenkung<br />
Im ungedämpften Fall γ = 0 haben wir<br />
|C| = F<br />
. (486)<br />
k<br />
|C| = F<br />
k<br />
1<br />
|1 − ξ2 . (487)<br />
|<br />
Jetzt ergibt sich also bei <strong>de</strong>r Eigenfrequenz Ω = k/m (ξ = 1) eine Resonanzkatastrophe,<br />
γ = 0 : lim<br />
ξ→1 |C| = ∞. (488)<br />
In <strong>de</strong>r Praxis wird diese Katastrophe durch eine endliche Dämpfung γ > 0 verhin<strong>de</strong>rt.<br />
Das Resonanzmaximum liegt dann etwas unterhalb <strong>de</strong>r Eigenfrequenz Ω = k/m.<br />
Außer<strong>de</strong>m wächst bei endlichem Γ > 0 die nachhinken<strong>de</strong> Phase Φ,<br />
<br />
ξ<br />
Φ(ξ) = arctan Γ<br />
1 − ξ2 <br />
+ πΘ(ξ − 1) (489)<br />
von Φ = 0 bei ξ = 0 stetig nach Φ = π bei ξ = 1 (wobei das Argument <strong>de</strong>s arctan<br />
2<br />
divergiert und sein Vorzeichen wechselt), und dann stetig weiter nach Φ = π bei ξ → ∞.<br />
Dieses Verhalten geht im ungedämpften Grenzfall Γ → 0 in eine Stufenfunktion über,<br />
<br />
0 (ξ < 1),<br />
γ = 0 : Φ(ξ) =<br />
(490)<br />
π (ξ > 1).<br />
80
|C(ξ)|<br />
tanΦ(ξ)<br />
Φ(ξ)<br />
81<br />
ξ<br />
ξ<br />
ξ
Zusammenfassung: Für die inhomogene lineare DGl<br />
m¨x(t) + γ ˙x(t) + kx(t) = F cos(Ωt), (491)<br />
mit vorgegebenen Konstanten m, γ, k, F,Ω ∈ R, haben wir eine spezielle Lösung gefun<strong>de</strong>n,<br />
xspez(t) = R cos(Ωt − Φ). (492)<br />
Deren Amplitu<strong>de</strong> R und Phase −Φ sind Funktionen <strong>de</strong>r dimensionslosen Parameter<br />
ξ := Ω<br />
k/m , Γ := γ<br />
√ km<br />
für äußere Antriebsfrequenz Ω bzw. intrinsische Dämpfungskonstante γ,<br />
R = F<br />
k<br />
1<br />
, tanΦ = Γ<br />
(1 − ξ2 ) 2 + (Γξ) 2<br />
ξ<br />
1 − ξ 2.<br />
(493)<br />
(494)<br />
Die allgemeine Lösung ergibt sich durch Addition <strong>de</strong>r allgemeinen Lösung <strong>de</strong>r entsprechen<strong>de</strong>n<br />
homogenen DGl (mit F = 0; wir betrachten hier <strong>de</strong>n Schwingfall γ 2 < 4km),<br />
xallg(t) = R cos(Ωt − Φ) + a cos(ωt) + b sin(ωt) e −λt<br />
(a, b ∈ R). (495)<br />
Unabhängig von <strong>de</strong>r äußeren Antriebsfrequenz Ω sind die Eigenfrequenz ω <strong>de</strong>s Oszillators<br />
und seine dämpfungsbedingte Abklingkonstante λ gegeben durch<br />
<br />
k<br />
ω =<br />
m −<br />
<br />
γ<br />
2 , λ =<br />
2m<br />
γ<br />
. (496)<br />
2m<br />
Die frei wählbaren Parameter a und b wer<strong>de</strong>n festgelegt durch die Anfangsbedingungen<br />
x(0) = x0, ˙x(0) = v0, (497)<br />
mit gewissen Werten x0 und v0 für Position bzw. Geschwindigkeit zur Zeit t = 0.<br />
geht die Einschwingphase zu En<strong>de</strong> und es gilt<br />
Für t ≫ 1<br />
λ<br />
x(t) → R cos(Ωt − Φ) (t ≫ 1/λ). (498)<br />
82