

- 1 - Lösung 1 Aufgabe 1 a. Die Regelgrösse des Brutkastens ist die ...
- 1 - Lösung 1 Aufgabe 1 a. Die Regelgrösse des Brutkastens ist die ...
- 1 - Lösung 1 Aufgabe 1 a. Die Regelgrösse des Brutkastens ist die ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Institut für Chemie und Bioingenieurwissenschaften Dr. Robert N. Grass<br />
Regelungstechnik FS 12<br />
<strong>Lösung</strong> 1<br />
<strong>Aufgabe</strong> 1<br />
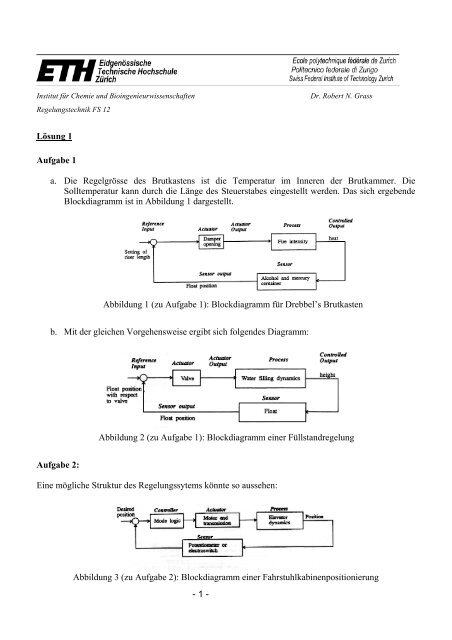
a. <strong>Die</strong> <strong>Regelgrösse</strong> <strong>des</strong> <strong>Brutkastens</strong> <strong>ist</strong> <strong>die</strong> Temperatur im Inneren der Brutkammer. <strong>Die</strong><br />
Solltemperatur kann durch <strong>die</strong> Länge <strong>des</strong> Steuerstabes eingestellt werden. Das sich ergebende<br />
Blockdiagramm <strong>ist</strong> in Abbildung 1 dargestellt.<br />
Abbildung 1 (zu <strong>Aufgabe</strong> 1): Blockdiagramm für Drebbel’s Brutkasten<br />
b. Mit der gleichen Vorgehensweise ergibt sich folgen<strong>des</strong> Diagramm:<br />
<strong>Aufgabe</strong> 2:<br />
Abbildung 2 (zu <strong>Aufgabe</strong> 1): Blockdiagramm einer Füllstandregelung<br />
Eine mögliche Struktur <strong>des</strong> Regelungssytems könnte so aussehen:<br />
Abbildung 3 (zu <strong>Aufgabe</strong> 2): Blockdiagramm einer Fahrstuhlkabinenpositionierung<br />
- 1 -
Der ungenaue Sensor könnte ein Schalter kurz vor dem Stockwerk sein. Wird er durch <strong>die</strong> Kabine<br />
betätigt, kann der Regler <strong>die</strong> Kabinengeschwindigkeit reduzieren. Ein genauere Positionsmessung kann<br />
danach zur Positionierung <strong>des</strong> Kabinenbodens auf Höhe <strong>des</strong> Stockwerkbodens verwendet werden. Der<br />
Vorteil <strong>die</strong>ses Verfahrens <strong>ist</strong>, dass <strong>die</strong> Kabinenposition nur an wenigen Stellen genau und damit teuer<br />
gemessen werden muss. Eine vernünftige Toleranz könnte 3mm betragen.<br />
<strong>Aufgabe</strong> 3<br />
Gegeben <strong>ist</strong> der zu befüllende Tank in Abbildung 4. Q sei der Zustrom, h <strong>die</strong> Füllhöhe und A<br />
der Bodenquerschnitt. Der Tank soll auf <strong>die</strong> Füllhöhe h* befüllt werden.<br />
Abbildung 4 (zu <strong>Aufgabe</strong> 3): Zu befüllender Tank<br />
<strong>Die</strong> dazu notwendige Füllzeit <strong>ist</strong> durch:<br />
t* = h* · A/Q<br />
gegeben.<br />
Eine Steuerung würde für jeden Tank den Zustrom für t* öffnen. Bei z.B. sich ändernder<br />
Grundfläche der Tanks würde <strong>die</strong> Füllhöhe variieren (Tank nicht mehr ganz befüllt oder<br />
übergelaufen). Denkbare Störungen sind Veränderungen, <strong>die</strong> <strong>die</strong> Füllhöhe beeinflussen, wie<br />
z.B. bereits vorhandene Flüssigkeit im Tank vor dem Befüllen.<br />
Eine mögliche <strong>Lösung</strong> <strong>die</strong>ses Problemes <strong>ist</strong> in Abbildung 5 skizziert. Der Befüllvorgang wird<br />
für jeden Tank durch ein Schwimmventil geregelt.<br />
Abbildung 5 (zu <strong>Aufgabe</strong> 3): Mehrere sequentiell zu füllende Tanks<br />
- 2 -
<strong>Aufgabe</strong> 4<br />
Zu jedem Zeitpunkt gilt für <strong>die</strong> Geschwindigkeit v <strong>des</strong> Ban<strong>des</strong> vor dem Kopf v = Rω. Da R davon<br />
abhängt, wie weit das Band bereits abgespielt wurde, muss ω entsprechend angepasst werden, damit v<br />
konstant bleibt. <strong>Die</strong>s könnte durch eine Steuerung geschehen (unter der Bedingung, dass <strong>die</strong> Kassette<br />
jeweils komplett zurückgespult <strong>ist</strong>), hätte jedoch den Nachteil, dass weder schwankende Banddicken<br />
noch unterschiedlich dicke Spulenkerne berücksichtigt werden könnten.<br />
- 3 -

![- 1 - Übung 1 Aufgabe 1: Blockdiagramme ([FrPE10] Aufg. 1.1 ...](https://img.yumpu.com/21065629/1/184x260/-1-ubung-1-aufgabe-1-blockdiagramme-frpe10-aufg-11-.jpg?quality=85)




![- 1 - Übung 2 Aufgabe 1: Fahrzeugaufhängung ([FrPE10] Aufg. 2.5 ...](https://img.yumpu.com/21040425/1/184x260/-1-ubung-2-aufgabe-1-fahrzeugaufhangung-frpe10-aufg-25-.jpg?quality=85)



![- 1 - Übung 6 Aufgabe 1 ([FrPE10] Aufg. 3.19) Finden Sie die ...](https://img.yumpu.com/21006515/1/184x260/-1-ubung-6-aufgabe-1-frpe10-aufg-319-finden-sie-die-.jpg?quality=85)


