

Können Lernalgorithmen interagieren wie im Gehirn? - Intelligent ...
Können Lernalgorithmen interagieren wie im Gehirn? - Intelligent ...
Können Lernalgorithmen interagieren wie im Gehirn? - Intelligent ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
2. Das Kleinhirn enthält ein internes Modell der Umgebung (Supervised Learning) und dient somit der<br />
Repräsentation der Umgebung mit zusätzlicher Fehlermin<strong>im</strong>ierung.<br />
3. Die Basalganglien werden zur Evaluierung eines gegebenen Zustands benutzt um auf der resultierenden<br />
Evaluierung basierend eine Aktion auszusuchen (Reinforcement Learning). Sie dienen somit der Aktionsselektion.<br />
Dieser Aufbau der Prinzipien entsteht aus ihren Aufgabenbereichen und lässt sich <strong>wie</strong> folgt auf das Beispiel Schw<strong>im</strong>men<br />
übertragen.<br />
1. Der Körper n<strong>im</strong>mt wahr das er sich <strong>im</strong> Wasser befindet und leitet diese Informationen weiter (Mapping von<br />
Umgebung → internes Modell).<br />
2. Die weitergereichten Informationen rufen die <strong>im</strong> Kleinhirn abgespeicherten Bewegungsabläufe ab (repräsentiert<br />
den Status „Im Wasser” mit „Schw<strong>im</strong>mbewegung”).<br />
3. Die Großhirnrinde leitet diese Informationen an die Basalganglien weiter, welche die nun geforderten Aktionen<br />
ausführt und unter Umständen andere fürs Schw<strong>im</strong>men irrelevante Aktionen hemmt.<br />
Anhand dieser drei Konstruktionsprinzipien wurden folgende Architekturen zusammengefasst, welche versuchen die<br />
gegenseitige Unterstützung der zuvor behandelten <strong>Gehirn</strong>areale abzubilden. Sie wurden zuvor bereits in [10]<br />
beschrieben und seien hier erneut benannt, um als Basis des Exper<strong>im</strong>ents zu fungieren.<br />
Aktionsselektion<br />
Die Aktionsselektion wird, <strong>wie</strong> zuvor in Abschnitt 2.3 beschrieben, von den Basalganglien übernommen. Welche<br />
möglichen Strategien und somit Architekturen daraus zu schließen sind lassen sich in 2 Kategorien untergliedern. Zum<br />
einen in die reaktive Aktionsselektion (engl. Reactive action selection) so<strong>wie</strong> zum anderen in die vorhersehenden<br />
Aktionsselektion (engl. Predictive action selection).<br />
Reaktive Aktionsselektion<br />
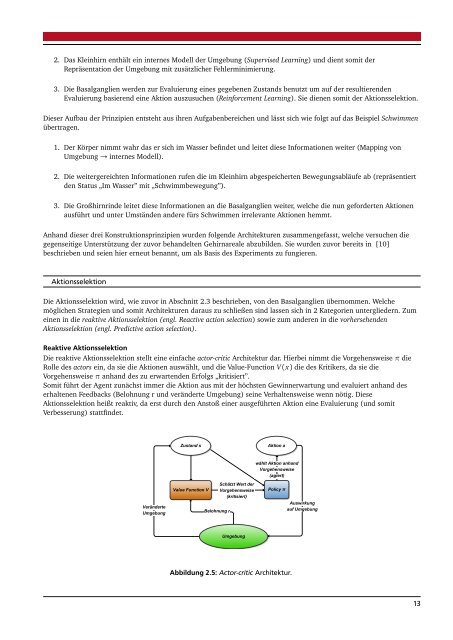
Die reaktive Aktionsselektion stellt eine einfache actor-critic Architektur dar. Hierbei n<strong>im</strong>mt die Vorgehensweise π die<br />
Rolle des actors ein, da sie die Aktionen auswählt, und die Value-Function V (x) die des Kritikers, da sie die<br />
Vorgehensweise π anhand des zu erwartenden Erfolgs „kritisiert”.<br />
Somit führt der Agent zunächst <strong>im</strong>mer die Aktion aus mit der höchsten Gewinnerwartung und evaluiert anhand des<br />
erhaltenen Feedbacks (Belohnung r und veränderte Umgebung) seine Verhaltensweise wenn nötig. Diese<br />
Aktionsselektion heißt reaktiv, da erst durch den Anstoß einer ausgeführten Aktion eine Evaluierung (und somit<br />
Verbesserung) stattfindet.<br />
Zustand s<br />
Aktion a<br />
wählt Aktion anhand<br />
Vorgehensweise<br />
(agiert)<br />
Veränderte<br />
Umgebung<br />
Value Function V<br />
Belohnung r<br />
Schätzt Wert der<br />
Vorgehensweise<br />
(kritisiert)<br />
Policy π<br />
Auswirkung<br />
auf Umgebung<br />
Umgebung<br />
Abbildung 2.5: Actor-critic Architektur.<br />
13







