Blatt 2 - Institut für Angewandte und Experimentelle Mechanik
Blatt 2 - Institut für Angewandte und Experimentelle Mechanik
Blatt 2 - Institut für Angewandte und Experimentelle Mechanik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Institut</strong> für <strong>Angewandte</strong><br />
<strong>und</strong> <strong>Experimentelle</strong> <strong>Mechanik</strong><br />
Technische <strong>Mechanik</strong> I<br />
ZÜ 2.1<br />
Aufgabe 2.1<br />
a<br />
⃗F 4 a<br />
O<br />
a<br />
⃗F 1<br />
⃗F 3<br />
z<br />
y<br />
x<br />
⃗ F2<br />
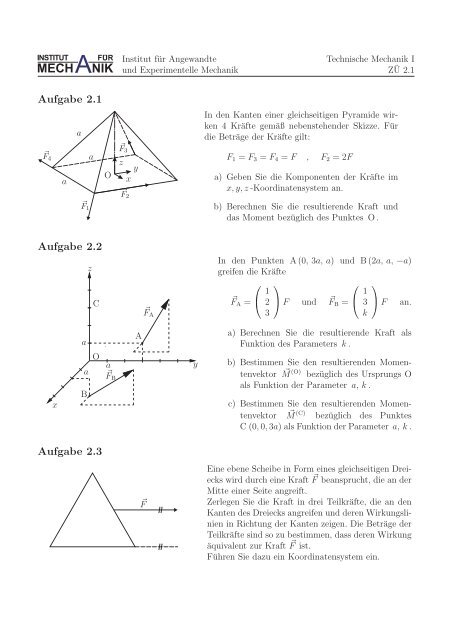
In den Kanten einer gleichseitigen Pyramide wirken<br />
4 Kräfte gemäß nebenstehender Skizze. Für<br />
die Beträge der Kräfte gilt:<br />
F 1 = F 3 = F 4 = F , F 2 = 2F<br />
a) Geben Sie die Komponenten der Kräfte im<br />
x,y,z-Koordinatensystem an.<br />
b) Berechnen Sie die resultierende Kraft <strong>und</strong><br />
das Moment bezüglich des Punktes O.<br />
Aufgabe 2.2<br />
z<br />
C<br />
⃗F A<br />
In den Punkten A(0, 3a, a) <strong>und</strong> B(2a, a, −a)<br />
greifen die Kräfte<br />
⎛ ⎞ ⎛ ⎞<br />
1<br />
1<br />
⃗F A = ⎝ 2 ⎠F <strong>und</strong> FB ⃗ = ⎝ 3 ⎠F an.<br />
3<br />
k<br />
x<br />
a<br />
a<br />
B<br />
O<br />
a<br />
⃗F B<br />
A<br />
y<br />
a) Berechnen Sie die resultierende Kraft als<br />
Funktion des Parameters k.<br />
b) Bestimmen Sie den resultierenden Momentenvektor<br />
⃗ M<br />
(O)<br />
bezüglich des Ursprungs O<br />
als Funktion der Parameter a, k.<br />
c) Bestimmen Sie den resultierenden Momentenvektor<br />
M ⃗ (C)<br />
bezüglich des Punktes<br />
C(0,0,3a) alsFunktionderParameter a, k.<br />
Aufgabe 2.3<br />
⃗F<br />
Eine ebene Scheibe in Form eines gleichseitigen Dreiecks<br />
wird durch eine Kraft ⃗ F beansprucht, die an der<br />
Mitte einer Seite angreift.<br />
Zerlegen Sie die Kraft in drei Teilkräfte, die an den<br />
Kanten des Dreiecks angreifen <strong>und</strong> deren Wirkungslinien<br />
in Richtung der Kanten zeigen. Die Beträge der<br />
Teilkräfte sind so zu bestimmen, dass deren Wirkung<br />
äquivalent zur Kraft ⃗ F ist.<br />
Führen Sie dazu ein Koordinatensystem ein.
<strong>Institut</strong> für <strong>Angewandte</strong><br />
<strong>und</strong> <strong>Experimentelle</strong> <strong>Mechanik</strong><br />
Technische <strong>Mechanik</strong> I<br />
ZÜ 2.2<br />
Lösung zur Aufgabe 2.1<br />
⃗F 4<br />
B<br />
C<br />
⎡ ⃗F 1<br />
⎢<br />
⃗r A = ⎣<br />
E<br />
⃗F 3 A<br />
z<br />
y<br />
x<br />
⃗ F2<br />
− a 2<br />
a<br />
2<br />
0<br />
⎤<br />
⎥<br />
⎦ ⃗r B =<br />
⎡<br />
⎢<br />
⎣<br />
D<br />
− a 2<br />
− a 2<br />
0<br />
⎤<br />
a) Zur Bestimmung der Kräftevektoren werden<br />
zunächst die Eckpunkte der Pyramide<br />
im Koordinatensystem O angegeben. Dabei<br />
werden die Eckpunkte wie in nebenstehender<br />
Skizze bezeichnet. Die Höhe der Pyramide<br />
kann durch zweifache Anwendung des<br />
SatzesvonPythagoraszuh = √ 1<br />
2<br />
aberechnet<br />
werden. Die Punktkoordinaten ergeben sich<br />
damit zu:<br />
⎥<br />
⎦ ⃗r C =<br />
⎡<br />
⎢<br />
⎣<br />
a<br />
2<br />
− a 2<br />
0<br />
⎤<br />
⎥<br />
⎦ ⃗r D =<br />
⎡<br />
⎢<br />
⎣<br />
a<br />
2<br />
a<br />
2<br />
0<br />
⎤<br />
⎥<br />
⎦ ⃗r E =<br />
⎡<br />
⎢<br />
⎣<br />
0<br />
0<br />
√1<br />
2<br />
a<br />
⎤<br />
⎥<br />
⎦<br />
Die Kraft F ⃗ 1 zeigt nun in Richtung der Pyramidenkante EC. Vektoriell kann diese Kante<br />
durch⃗r C −⃗r E beschriebenwerden.DaderKraftvektordenBetragF besitzt,dieKantejedoch<br />
dieLängeaergibtsichfürdenKraftvektor F ⃗ 1 = F(⃗r a C−⃗r E ).DieübrigenKraftvektorenlassen<br />
sich ebenso berechnen <strong>und</strong> ergeben sich durch Einsetzen der Punktkoordinaten zu:<br />
⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤<br />
F<br />
F<br />
2<br />
0<br />
2<br />
−F<br />
⎢ ⃗F 1 = ⎣ − F ⎥<br />
2 ⎦ , F2 ⃗ ⎢ ⎥<br />
= ⎣ 2F ⎦ , F3 ⃗ ⎢<br />
= ⎣ − F ⎥<br />
2 ⎦ , ⃗ ⎢ ⎥<br />
F4 = ⎣ 0 ⎦<br />
−√ F 2<br />
0<br />
F√<br />
2<br />
0<br />
b) Die resultierende Kraft ist gegeben durch<br />
⎡<br />
0<br />
4∑<br />
⃗F = ⃗F i = F ⃗ 1 + F ⃗ 2 + F ⃗ 3 + F ⃗ ⎢<br />
4 = ⎣ F<br />
i=1<br />
0<br />
<strong>und</strong> das Moment bezüglich O durch<br />
⃗M (O) =<br />
Anmerkung<br />
4∑<br />
⃗r i × F ⃗ i =⃗r C × F ⃗ 1 +⃗r C × F ⃗ 2 +⃗r A × F ⃗ 3 +⃗r B × F ⃗ 4<br />
i=1<br />
⎤<br />
⎥<br />
⎦<br />
⎡<br />
(<br />
=⃗r C × ⃗F1 + F ⃗ )<br />
2 +⃗r A × F ⃗ 3 +⃗r B × F ⃗ ⎢<br />
4 = aF ⎣<br />
In dieser Aufgabe wird nur in einem Koordinatensystem gerechnet. Aus diesem Gr<strong>und</strong> wird<br />
bei der Berechnung der Vektoren die verkürzte Schreibweise verwendet, bei der die Basisvektoren<br />
bzw. das Koordinatensystem nicht explizit angegeben werden.<br />
√<br />
2<br />
2<br />
√<br />
2<br />
2<br />
1<br />
2<br />
⎤<br />
⎥<br />
⎦
<strong>Institut</strong> für <strong>Angewandte</strong><br />
<strong>und</strong> <strong>Experimentelle</strong> <strong>Mechanik</strong><br />
Technische <strong>Mechanik</strong> I<br />
ZÜ 2.3<br />
Lösung zur Aufgabe 2.2<br />
a) resultierende Kraft:<br />
⃗F res = ∑ i<br />
⃗F i =<br />
⎛<br />
⎜<br />
⎝<br />
1<br />
2<br />
3<br />
⎞<br />
⎛<br />
⎟ ⎜<br />
⎠F + ⎝<br />
1<br />
3<br />
k<br />
⎞<br />
⎛<br />
⎟ ⎜<br />
⎠F = ⎝<br />
2<br />
5<br />
k +3<br />
⎞<br />
⎟<br />
⎠F<br />
b) resultierendes Moment bzgl. O:<br />
⃗M (O) = ∑ i<br />
⎛<br />
=<br />
=<br />
⎜<br />
⎝<br />
⎛<br />
⎜<br />
⎝<br />
⃗r i ×⃗a i =⃗r A × ⃗ F A +⃗r B × ⃗ F B<br />
0<br />
3a<br />
a<br />
⎞<br />
⎛<br />
⎟ ⎜<br />
⎠× ⎝<br />
10+k<br />
−2k<br />
2<br />
⎞<br />
1<br />
2<br />
3<br />
⎟<br />
⎠aF<br />
⎞<br />
c) resultierendes Moment bzgl. C:<br />
⎛<br />
⎟ ⎜<br />
⎠F + ⎝<br />
allgemein:<br />
⃗M (P) = ⃗r PO ×⃗a+ ⃗ M (O)<br />
⃗M (C) = ⃗r CO × F ⃗ res + M<br />
⎛ ⎞ ⎛<br />
⃗ (O)<br />
0 2<br />
⎜ ⎟ ⎜<br />
= ⎝ 0 ⎠× ⎝ 5<br />
−3a k +3<br />
⎛ ⎞<br />
=<br />
⎜<br />
⎝<br />
25+k<br />
−6−2k<br />
alternativer Lösungsweg:<br />
⃗M (C) = ∑ i<br />
⎛<br />
=<br />
=<br />
⎜<br />
⎝<br />
⎛<br />
⎜<br />
⎝<br />
2<br />
⎟<br />
⎠aF<br />
2a<br />
a<br />
−a<br />
⎞<br />
⎞<br />
⎛<br />
⎟ ⎜<br />
⎠× ⎝<br />
⎟<br />
⎠F +<br />
⃗r i ×⃗a i =⃗r CA × ⃗ F A +⃗r CB × ⃗ F B<br />
0<br />
3a<br />
−2a<br />
⎞<br />
25+k<br />
−6−2k<br />
2<br />
⎛<br />
⎟ ⎜<br />
⎠× ⎝<br />
⎞<br />
1<br />
2<br />
3<br />
⎟<br />
⎠aF<br />
⎞<br />
⎛<br />
⎟ ⎜<br />
⎠F + ⎝<br />
2a<br />
a<br />
−4a<br />
⎞<br />
⎛<br />
⎜<br />
⎝<br />
1<br />
3<br />
k<br />
⎞<br />
⎛<br />
⎟ ⎜<br />
⎠F = ⎝<br />
10+k<br />
−2k<br />
⎛<br />
⎟ ⎜<br />
⎠× ⎝<br />
2<br />
1<br />
3<br />
k<br />
⎞<br />
⎞<br />
7<br />
1<br />
−3<br />
⎞<br />
⎟ ⎜<br />
⎠aF = ⎝<br />
⎛<br />
⎟ ⎜<br />
⎠F = ⎝<br />
⎛<br />
⎟ ⎜<br />
⎠aF + ⎝<br />
⎛<br />
13<br />
−2<br />
−3<br />
15<br />
−6<br />
0<br />
⎞<br />
⎞<br />
k +3<br />
−1−2k<br />
5<br />
⎛<br />
⎟ ⎜<br />
⎠aF + ⎝<br />
⎛<br />
⎟ ⎜<br />
⎠aF + ⎝<br />
⎞<br />
⎟<br />
⎠aF<br />
10+k<br />
−2k<br />
2<br />
k +12<br />
−4−2k<br />
5<br />
⎞<br />
⎟<br />
⎠aF<br />
⎞<br />
⎟<br />
⎠aF
<strong>Institut</strong> für <strong>Angewandte</strong><br />
<strong>und</strong> <strong>Experimentelle</strong> <strong>Mechanik</strong><br />
Technische <strong>Mechanik</strong> I<br />
ZÜ 2.4<br />
Lösung zur Aufgabe 2.3<br />
Die Kraft ⃗ F soll durch drei Kräfte ⃗ F 1 , ⃗ F 2 , ⃗ F 3 ersetzt<br />
werden, die in den Seiten des Dreiecks liegen. Die<br />
Richtung der Kräfte ist also vorgegeben, gesucht sind<br />
Betrag <strong>und</strong> Orientierung. Die Wirkung der 3 Kräfte<br />
soll äquivalent zu der von ⃗ F sein, d.h. die resultierenden<br />
Kräfte <strong>und</strong> Momente müssen gleich sein.<br />
Diese müssen berechnet <strong>und</strong> gleichgesetzt werden.<br />
Dazu werden die Kräfte ⃗ F 1 , ⃗ F 2 <strong>und</strong> ⃗ F 3 im eingezeichneten<br />
xyz-Koordinatensystem dargestellt (Es kann<br />
auch jedes andere Koordinatensystem zur Lösung der<br />
Aufgabe verwendet werden).<br />
Die Kräfte lauten dann:<br />
⎡ ⎤ ⎡ ⎤<br />
F F 1<br />
⃗F = ⎣0⎦ , F1 ⃗ = ⎣ 0 ⎦ ,<br />
0 0<br />
⎡ ⎤ ⎡<br />
−F 2 cos60 ◦ − 1F ⎤ ⎡ ⎤ ⎡<br />
⃗F 2 = ⎣ F 2 sin60 ◦ √2 2 −F 3 cos60 ◦ − 1F ⎤<br />
⎦ = ⎣ 3<br />
F ⎦<br />
2 2 , F3 ⃗ = ⎣−F 3 sin60 ◦<br />
2 3<br />
⎦ = ⎣− √ 3<br />
F ⎦<br />
2 3 ,<br />
0 0 0 0<br />
wobei F 1 , F 2 , F 3 noch unbekannt sind.<br />
Nun wird ⃗ F mit der Summe der Kräfte ⃗ F 1 , ⃗ F 2 , ⃗ F 3 gleichgesetzt:<br />
y<br />
z<br />
60 ◦<br />
x<br />
⃗F 3<br />
⃗F 2<br />
60 ◦<br />
⃗F 1<br />
⃗F<br />
F = F 1 − 1 2 F 2 − 1 2 F 3 , (1)<br />
√ √<br />
3 3<br />
0 = 0+<br />
2 F 2 −<br />
2 F 3 . (2)<br />
Das Gleichgewicht der resultierenden Momente kann bezüglich eines beliebigen Bezugspunktes<br />
aufgestellt werden. Hier wird der Koordinatenursprung O als Bezugspunkt gewählt. Die Wirkungslinien<br />
von F ⃗ 1 <strong>und</strong> F ⃗ 3 gehen durch O, d.h. diese Kräfte üben kein Moment auf O aus. Die<br />
Ortsvektoren der Kraftangriffspunkte von F ⃗ <strong>und</strong> F ⃗ 2 zu dem Bezugspunkt O sind identisch <strong>und</strong><br />
sind aus folgender Skizze ersichtlich:<br />
a<br />
h<br />
⃗F 2<br />
Wird dieSeitenlängedesDreiecks als aangenommen,<br />
so lautet die Höhe des gleichseitigen Dreiecks<br />
√<br />
) 2<br />
√<br />
1 3<br />
⃗F h = a −( 2 2 a =<br />
2 a.<br />
60 ◦
<strong>Institut</strong> für <strong>Angewandte</strong><br />
<strong>und</strong> <strong>Experimentelle</strong> <strong>Mechanik</strong><br />
Technische <strong>Mechanik</strong> I<br />
ZÜ 2.5<br />
Die Momente der Kräfte bezüglich O lassen sich nun vektoriell bestimmen. Werden die resultierenden<br />
Momente gleichgesetzt, erhält man<br />
⃗r 2 × ⃗ F =⃗r 1 × ⃗ F 1 +⃗r 2 × ⃗ F 2 +⃗r 3 × ⃗ F 3 .<br />
Die Vektoren vom Bezugspunkt O zu den Wirkungslinien der Kräfte lauten<br />
⎡ ⎤<br />
⃗r 1 =⃗r 3 =⃗0, ⃗r 2 = ⎣<br />
3a<br />
4<br />
h<br />
2<br />
0<br />
3a<br />
4<br />
h<br />
2<br />
0<br />
⎦ ,<br />
<strong>und</strong> somit ergibt sich<br />
⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡<br />
F 0<br />
⎣ ⎦× ⎣0⎦ = ⎣0⎦×<br />
⎣<br />
0 0<br />
was sich vereinfacht zu<br />
⎡ ⎡<br />
0<br />
⎣ 0 ⎦ = ⎣<br />
− √ 3<br />
4 aF ⎤<br />
0<br />
0<br />
√<br />
3<br />
2 aF 2<br />
⎤<br />
F 1<br />
0<br />
0<br />
⎤<br />
⎡<br />
⎦+ ⎣<br />
⎤<br />
3a<br />
4<br />
h ⎦×<br />
2<br />
0<br />
⎡<br />
− 1F ⎤ ⎡ ⎤ ⎡<br />
√2 2 0 − 1F ⎤<br />
2 3<br />
⎣ 3<br />
F 2 2<br />
⎦+ ⎣0⎦×<br />
⎣− √ 3<br />
F ⎦<br />
2 3 ,<br />
0 0 0<br />
⎦ , bzw. − √ 3<br />
4 aF = √ 3<br />
2 aF 2 . (3)<br />
Mit den 3 Gleichungen (1) – (3) lassen sich nun die 3 Unbekannten F 1 , F 2 , F 3 bestimmen. Aus<br />
(3) folgt:<br />
F 2 = − 1 2 F (4)<br />
Gleichung (4) in (2) eingesetzt:<br />
√<br />
3<br />
0 =<br />
(− 1 ) √<br />
3<br />
2 2 F −<br />
2 F 3 =⇒ F 3 = − 1 2 F . (5)<br />
Setzt man nun (4) <strong>und</strong> (5) in (1) ein, erhält man<br />
F = F 1 − 1 (− 1 )<br />
2 2 F − 1 (− 1 )<br />
2 2 F =⇒ F 1 = 1 2 F . (6)<br />
Die gesuchten Kräfte lauten also<br />
F 1 = 1 2 F F 2 = − 1 2 F F 3 = − 1 2 F .<br />
Anmerkung<br />
Die Momente der Kräfte bezüglich O lassen sich bei ebenen Systemen auch über skalare Größen<br />
bestimmen. Die Formel hierfür lautet M = l·F, wobei der Hebelarm l den senkrechten Abstand<br />
zwischen der Wirkungslinie der Kraft F <strong>und</strong> dem Bezugspunkt O darstellt.
<strong>Institut</strong> für <strong>Angewandte</strong><br />
<strong>und</strong> <strong>Experimentelle</strong> <strong>Mechanik</strong><br />
Technische <strong>Mechanik</strong> I<br />
ZÜ 2.6<br />
r<br />
a<br />
h<br />
F 2<br />
Wird wiederum die Seitenlänge des Dreiecks als a angenommen,<br />
ergibt sich für den Abstand r<br />
F r = h √<br />
3<br />
2 = 4 a.<br />
60 ◦<br />
Nun wird das aus F resultierende Moment bezüglich O mit dem aus F 1 , F 2 , F 3 resultierenden<br />
gleichgesetzt, Momente werden in z-Richtung positiv angenommen:<br />
−r ·F = 0·F 1 +h·F 2 +0·F 3 .<br />
Dies entspricht Gleichung (3).