Aufgaben und Kurzlösungen - IAS - Technische Universität Dresden
Aufgaben und Kurzlösungen - IAS - Technische Universität Dresden
Aufgaben und Kurzlösungen - IAS - Technische Universität Dresden

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
c○<strong>Technische</strong> Universität <strong>Dresden</strong>, 1996-2013<br />
Professur für Systemtheorie <strong>und</strong> Sprachtechnologie<br />
Prof. Dr.-Ing. habil. R. Hoffmann 21. <strong>und</strong> 28. Januar 2014<br />
Systemtheorie I – 7. Übung 1<br />
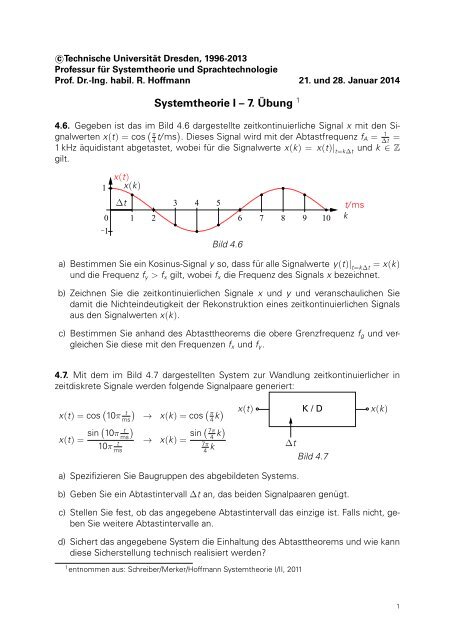
4.6. Gegeben ist das im Bild 4.6 dargestellte zeitkontinuierliche Signal x mit den Signalwerten<br />
x(t) = cos ( π<br />
t/ ms) . Dieses Signal wird mit der Abtastfrequenz f<br />
4 A = 1 =<br />
∆t<br />
1 kHz äquidistant abgetastet, wobei für die Signalwerte x(k) = x(t)| t=k∆t<br />
<strong>und</strong> k ∈ Z<br />
gilt.<br />
1<br />
0 1 2<br />
6 7 8<br />
−1<br />
x(t)<br />
x(k)<br />
∆t<br />
3 4 5<br />
Bild 4.6<br />
t/ ms<br />
9 10 k<br />
a) Bestimmen Sie ein Kosinus-Signal y so, dass für alle Signalwerte y(t)| t=k∆t<br />
= x(k)<br />
<strong>und</strong> die Frequenz f y > f x gilt, wobei f x die Frequenz des Signals x bezeichnet.<br />
b) Zeichnen Sie die zeitkontinuierlichen Signale x <strong>und</strong> y <strong>und</strong> veranschaulichen Sie<br />
damit die Nichteindeutigkeit der Rekonstruktion eines zeitkontinuierlichen Signals<br />
aus den Signalwerten x(k).<br />
c) Bestimmen Sie anhand des Abtasttheorems die obere Grenzfrequenz f g <strong>und</strong> vergleichen<br />
Sie diese mit den Frequenzen f x <strong>und</strong> f y .<br />
4.7. Mit dem im Bild 4.7 dargestellten System zur Wandlung zeitkontinuierlicher in<br />
zeitdiskrete Signale werden folgende Signalpaare generiert:<br />
x(t) = cos ( 10π t<br />
ms<br />
x(t) = sin ( 10π t<br />
ms<br />
10π t<br />
ms<br />
) (<br />
→ x(k) = cos<br />
π k) x(t) K / D<br />
x(k)<br />
4<br />
→ x(k) = sin ( 7π<br />
k) 4<br />
7π<br />
k ∆t<br />
4<br />
)<br />
a) Spezifizieren Sie Baugruppen des abgebildeten Systems.<br />
Bild 4.7<br />
b) Geben Sie ein Abtastintervall ∆t an, das beiden Signalpaaren genügt.<br />
c) Stellen Sie fest, ob das angegebene Abtastintervall das einzige ist. Falls nicht, geben<br />
Sie weitere Abtastintervalle an.<br />
d) Sichert das angegebene System die Einhaltung des Abtasttheorems <strong>und</strong> wie kann<br />
diese Sicherstellung technisch realisiert werden?<br />
1 entnommen aus: Schreiber/Merker/Hoffmann Systemtheorie I/II, 2011<br />
1
4.8. Bei der äquidistanten Abtastung des zeitkontinuierlichen Signals x mit den Signalwerten<br />
x(t) = cos ( π<br />
t/ ms) erhält man für die Abtastfrequenz f<br />
4 A = 1 = 1 kHz eine<br />
∆t 4<br />
Folge von Abtastwerten x(k).<br />
a) Bestimmen Sie diese Abtastwerte x(k) = x(t)| t=k∆t<br />
<strong>und</strong> stellen Sie x(t) <strong>und</strong> x(k)<br />
in ein gemeinsames Diagramm grafisch dar!<br />
b) Bestimmen Sie für das Signal ˜x(t) = 2 cos ( π<br />
4 t/ ms + ϕ) einen Phasenwinkel ϕ mit<br />
0 ≤ ϕ < 2π so, dass ˜x(t)| t=k∆t<br />
= x(k) gilt! Ist das Ergebnis eindeutig?<br />
c) Interpretieren Sie die Schlussfolgerung aus b) im Hinblick auf das Abtasttheorem!<br />
d) Die Änderung der Abtastfrequanz auf f A2 = 1 kHz führt zu einer neuen Folge von<br />
2<br />
Abtastwerten x 2 (k). Skizzieren Sie daraufhin x(t) <strong>und</strong> x 2 (k) erneut, geben Sie eine<br />
Formel zur Rekonstruktion der Signalwerte x(t) aus x 2 (k) mit Hilfe der Abtastreihe<br />
an <strong>und</strong> berechnen Sie speziell x(5 ms) näherungsweise für −2 ≤ k ≤ 6.<br />
2
Kurzlösungen<br />
4.6.<br />
( ) 7π<br />
a) y(t) = cos<br />
4 t/ ms<br />
c) f g < 1 2 , f x < f g , f y > f g : Aliasing<br />
4.7.<br />
b) ∆t = 7<br />
40 ms<br />
c) einzige Lösung<br />
4.8.<br />
a) x(k) = (−1) k<br />
b) ϕ 1 = π 3 <strong>und</strong> ϕ 2 = 5π 3<br />
d) x(t) =<br />
∞∑<br />
k=−∞<br />
x(5 ms) ≈ −0,7013<br />
( π<br />
)<br />
x(k · 2 ms) · si<br />
2 (t/ ms − 2k)<br />
3