Aufgabe 11 - Institut für Leistungselektronik und Elektrische Antriebe ...
Aufgabe 11 - Institut für Leistungselektronik und Elektrische Antriebe ...
Aufgabe 11 - Institut für Leistungselektronik und Elektrische Antriebe ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Universität<br />
Stuttgart<br />
<strong>Institut</strong> <strong>für</strong> <strong>Leistungselektronik</strong><br />
<strong>und</strong> <strong>Elektrische</strong> <strong>Antriebe</strong><br />
Prof. Dr.-Ing. J. Roth-Stielow<br />
<strong>Aufgabe</strong> <strong>11</strong><br />
Zeitdiskret arbeitendes Regelsystem<br />
(Prüfungsaufgabe SS 2003)<br />
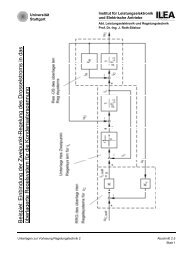
Für die in Bild 1 dargestellte Regelstrecke 2. Ordnung soll ein zeitdiskret<br />
arbeitendes Regelsystem mit einer Abtastzeit von T A = 150µs aufgebaut werden.<br />
Bei der Bearbeitung der <strong>Aufgabe</strong> soll vorausgesetzt werden, dass die<br />
Rechentotzeit des Regel-Rechen-Geräts vernachlässigbar klein ist.<br />
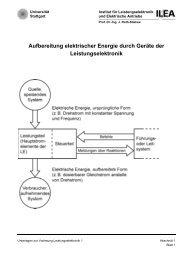
Bild 1<br />
Blockschaltbild der Übertragungsstrecke, die von einem zeitdiskret<br />
arbeitenden Regel-Rechen-Gerät geführt werden soll<br />
Übungen Regelungstechnik 2 <strong>Aufgabe</strong> <strong>11</strong><br />
Seite 1
Teilaufgaben:<br />
Zunächst soll ein zeitdiskretes Modell der zu führenden Übertragungsstrecke<br />
erstellt werden, welches die zeitlichen Verläufe der beiden Zustandsgrößen x 1 (t)<br />
<strong>und</strong> x 2 (t) zu allen Abtastzeitpunkten exakt beschreibt. Das zu erstellende<br />
zeitdiskrete Modell soll eine Übertragungsstrecke beschreiben, die insgesamt aus<br />
den folgenden drei Komponenten besteht:<br />
− einem Sample&Hold-Glied mit der Abtastzeit von T A = 150µs , das die<br />
Stellgrößenzahlenfolge y(k) in eine treppenförmig verlaufende<br />
zeitkontinuierliche Stellgröße y(t) umwandelt,<br />
− der in Bild 1 dargestellten zeitkontinuierlichen Übertragungsstrecke 2. Ordnung<br />
mit der Stellgröße y(t) als Eingangsgröße <strong>und</strong> den beiden Zustandsgrößen<br />
x 1 (t) <strong>und</strong> x 2 (t) als Ausgangsgrößen der Bausteine mit Zeitverhalten <strong>und</strong><br />
− zwei Abtasteinheiten mit der Abtastzeit T A = 150µs, welche die beiden<br />
Zustandsgrößen x 1 (t) <strong>und</strong> x 2 (t) in die beiden Zahlenfolgen x 1 (k) <strong>und</strong> x 2 (k)<br />
umwandeln.<br />
1. Geben Sie die Übertragungsfunktion<br />
F s (p) |OR = x 1(p)<br />
y(p)<br />
= x(p)<br />
y(p)<br />
der zu führenden Übertragungsstrecke an.<br />
2. Bestimmen Sie <strong>für</strong> y(p) ≡ 0 den Zusammenhang zwischen den beiden<br />
Zustandsgrößen x 2 (p) <strong>und</strong> x 1 (p).<br />
3. Geben Sie zwei Differenzengleichungen 1. Ordnung an, die zusammen das<br />
dynamische Verhalten der Übertragungsstrecke über der Folge von<br />
Abtastzeitpunkten beschreiben. Verwenden Sie <strong>für</strong> die Bestimmung der<br />
Koeffizienten der beiden Differenzengleichungen neben dem in Bild 1<br />
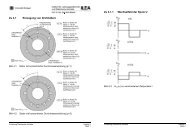
dargestellten Blockschaltbild auch die in Bild 2 dargestellten Simulationsergebnisse,<br />
welche die zeitlichen Verläufe der beiden Zustandsgrößen x 1 (t)<br />
<strong>und</strong> x 2 (t) bei einem Sprung der Stellgröße y(t) von 0 auf 1 zum Zeitpunkt<br />
t = 0 <strong>für</strong> den Zeitbereich -100µs t 400µs zeigen. Zum Zeitpunkt t = 0<br />
weisen die beiden Zustandsgrößen x 1 (t) <strong>und</strong> x 2 (t) den Wert null auf.<br />
Übungen Regelungstechnik 2 <strong>Aufgabe</strong> <strong>11</strong><br />
Seite 2
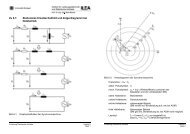
Bild 2<br />
Zeitliche Verläufe der beiden Zustandsgrößen x 1 (t) <strong>und</strong> x 2 (t) bei einem<br />
Sprung im Verlauf der Stellgröße y(t) zum Zeitpunkt t = 0<br />
4. Transformieren Sie die beiden Differenzengleichungen mit Hilfe der<br />
Z-Transformation in den Bildbereich.<br />
5. Erstellen Sie ein Blockschaltbild des zeitdiskreten Modells der Übertragungsstrecke.<br />
In diesem Blockschaltbild sollen die beiden Zustandsgrößen x 1 <strong>und</strong><br />
x 2 als Ausgangsgrößen der Bausteine mit Zeitverhalten auftreten.<br />
6. Geben Sie die Übertragungsfunktion<br />
F s (z) |OR = x 1(z)<br />
y(z)<br />
= x(z)<br />
y(z)<br />
des zeitdiskreten Modells der Übertragungsstrecke an.<br />
Übungen Regelungstechnik 2 <strong>Aufgabe</strong> <strong>11</strong><br />
Seite 3
7. Geben Sie den Zusammenhang zwischen den beiden Zustandsgrößen x 2 (z)<br />
<strong>und</strong> x 1 (z) an.<br />
8. Stellen Sie den in Teilaufgabe 6 ermittelten Zusammenhang zwischen der<br />
Regelgröße x <strong>und</strong> der Stellgröße y in einem Blockschaltbild derart dar, dass<br />
an den Ausgängen der Bausteine mit Zeitverhalten die Größen x c <strong>und</strong> z·x c<br />
auftreten <strong>und</strong> dass gilt<br />
x(z)<br />
x c (z) | |<br />
z=1<br />
= 1<br />
Diesenfalls kennzeichnet die in diesem Blockschaltbild auftretende Größe x c<br />
die "centrale Zustandsgröße" des Regelsystems.<br />
Der Zusammenhang zwischen der Stellgröße y(k) <strong>und</strong> den Zustandsgrößen x 1 (k)<br />
<strong>und</strong> x 2 (k) wird bei der vorausgesetzten Abtastzeit von T A = 150µs auch durch die<br />
Differenzengleichungen<br />
100x 1 (k) − 101,8x 1 (k−1) + 1,8x 1 (k−2) = 80y(k−1) − 55,5y(k−2)<br />
<strong>und</strong><br />
100x 2 (k) − 1,8x 2 (k−1) = 160x 1 (k) − <strong>11</strong>1x 1 (k−1)<br />
beschrieben.<br />
Im Folgenden soll das Regel-Rechen-Gerät dimensioniert werden.<br />
9. Berechnen Sie die Einstellparameter des Regel-Rechen-Geräts so, dass die<br />
Führungsübertragungsfunktion<br />
F g (z) = x(z)<br />
w(z)<br />
eine einfache Polstelle bei<br />
z 1 = 0,5<br />
<strong>und</strong> eine einfache Polstelle bei<br />
z 2 = 0,9<br />
aufweist <strong>und</strong> dass gilt<br />
|<br />
F g (z)| = x(z)<br />
|| w(z) | = 1 .<br />
z=1 | z=1<br />
Übungen Regelungstechnik 2 <strong>Aufgabe</strong> <strong>11</strong><br />
Seite 4
10. Geben Sie die Führungsübertragungsfunktion<br />
F g (z) = x(z)<br />
w(z)<br />
des in Teilaufgabe 9 dimensionierten zeitdiskreten Regelsystems an.<br />
Übungen Regelungstechnik 2 <strong>Aufgabe</strong> <strong>11</strong><br />
Seite 5