Ãberblick zur Robotik
Ãberblick zur Robotik
Ãberblick zur Robotik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Überblick (1)<br />
Begriff – Ursprung<br />
1920 prägte Karel Čapek den Begriff „robota“ (slowakisch) =<br />
arbeiten; für Čapek ist ein Roboter (im Gegensatz zum<br />
Menschen) „rastlos arbeitend“.<br />
• „Rossum‘s Universal Robot“ von Karel Čapek<br />
• Entwicklung einer chemischen Substanz <strong>zur</strong> Herstellung von<br />
Robotern<br />
• Roboter sollten Menschen gehorsam dienen und alle schweren<br />
Arbeiten verrichten<br />
• Wissenschaftler Rossum entwickelt „perfekten“ Roboter<br />
• Roboter fügen sich nicht mehr, rebellieren und töten gesamtes<br />
menschliches Leben<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
Überblick (2)<br />
Asimovsche Robotergesetze<br />
1. Ein Roboter darf keinen Menschen verletzen oder durch Untätigkeit zu<br />
Schaden kommen lassen.<br />
2. Ein Robot muss den Befehlen eines Menschen gehorchen, es sei<br />
denn, solche Befehle stehen im Widerspruch zum ersten Gesetz.<br />
3. Ein Robot muss seine eigene Existenz schützen, solange dieser<br />
Schutz nicht dem ersten oder zweiten Gesetz widerspricht.<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
Überblick (3)<br />
Roboter – Definitionen<br />
Allgemeine Definitionen<br />
• Arbeitsmaschine<br />
• Künstlicher Mensch<br />
• Kriegsmaschine / Kampfmaschine<br />
• oder im Science Fiction (I. Asimov): denkende Maschine<br />
Technische Definitionen<br />
• flexibles Handhabungsgerät (mit Greifvorrichtung, Sensoren)<br />
• reprogrammierbares, multifunktionales Handhabungsgerät <strong>zur</strong> Bewegung<br />
(Manipulation) von Objekten auf nicht festgelegten Bahnen für eine Vielzahl<br />
von Aufgaben<br />
• Maschine <strong>zur</strong> Aufnahme von Informationen (Sensoren) und Einwirkung auf<br />
die Umwelt (Aktuatoren / Aktoren)<br />
• eine Maschine die sich selbst und / oder Objekte im Raum bewegen kann<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
Überblick (4)<br />
Roboter – Definitionen<br />
• Roboter – Maschinenmensch; Bewegungen durch elektrische Wellen<br />
(drahtlos) ausgelöst, auch elektronisch gesteuerter Automat (Kleines Lexikon<br />
der Büchergilde 1973)<br />
• Ein Roboter ist ein (wieder)programmierbarer, multifunktionaler Manipulator,<br />
dazu gedacht, Materialien, Teile oder (spezialisierte) Werkzeuge mit Hilfe<br />
verschiedener programmierter (minimal vieler) Bewegungen zu<br />
bewegen/benutzen (nach „The Robot Institute of America“ 1979)<br />
• Ein Roboter ist eine äußerlich wie ein Mensch gestaltete Apparatur, die<br />
manuelle Funktionen eines Menschen ausführen kann; Maschinenmensch.<br />
Elektronisch gesteuertes Gerät (Fremdwörter-Duden, 1990).<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
Überblick (5)<br />
Roboter – Definitionen<br />
<strong>Robotik</strong> ist ein interdisziplinär ausgerichtetes Forschungsgebiet, bei dem im<br />
Mittelpunkt mechanische Vorrichtungen und geeignete Steuereinheiten<br />
selbsttätig komplexe Aufgaben verrichten. Während Roboter im Bereich des<br />
Science-Fiction meist mit menschenähnlicher Gestalt und sensorischen<br />
Fähigkeiten vorgestellt werden, sind die bisher praktisch eingesetzten Roboter<br />
stationäre Manipulatoren, die durch Programmierung für wechselnde industrielle<br />
Aufgaben eingesetzt werden können, z.B. Schweiß- oder Lackierarbeiten im<br />
Automobilbau<br />
(vgl. NEUMANN, Lexikon der Informatik und Datenverabeitung).<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
Überblick (6)<br />
Roboter – Definitionen<br />
VDI-Richtlinie 2860 (1990):<br />
Ein Roboter ist ein frei programmierbarer, multifunktionaler Manipulator mit<br />
mindestens 3 unabhängigen Achsen, um Materialien, Teile, Werkzeuge oder<br />
Geräte auf programmierten, variablen Bahnen zu bewegen <strong>zur</strong> Erfüllung<br />
verschiedener Aufgaben.<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
Überblick (7)<br />
Thomas Christaller (2001):<br />
Roboter sind sensumotorische Maschinen <strong>zur</strong> Erweiterung der menschlichen<br />
Handlungsfähigkeit. Sie bestehen aus mechatronischen Komponenten, Sensoren<br />
und rechnerbasierten Kontroll- und Steuerungsfunktionen. Die Komplexität eines<br />
Roboters unterscheidet sich deutlich von anderen Maschinen durch die größere<br />
Anzahl von Freiheitsgraden und die Vielfalt und den Umfang seiner<br />
Verhaltensformen.<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
Überblick (8)<br />
Roboter-Fähigkeiten und Komponenten nach Thring u. Todd:<br />
• Möglichkeit, sich selbst und / oder physikalische Objekte zu bewegen.<br />
• Arm, Handgelenke und Effektor, falls Objekte bewegt werden können<br />
• Räder, Beine, o. ä., falls der Roboter mobil ist<br />
• Antrieb und Steuerung für genannte Bewegungen<br />
• Rechner <strong>zur</strong> Entscheidungsfindung und Speicherung von Befehlen.<br />
• Sensoren für<br />
– Berührung, Kräfte, Momente<br />
– Positionsbestimmung, Armstellung, Stellung der Handgelenke<br />
– Entfernungsmessung<br />
– Form-, Farb-, Größen- und Bewegungserkennung mittels Bildverarbeitung<br />
– Messung von Wärmeleitfähigkeit, Temperatur, elektrischer Spannung<br />
– Wahrnehmung von Oberflächenbeschaffenheit & Geruch von Objekten<br />
– Erkennung von Schallwellen und Tönen<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
Überblick (9)<br />
Definition nach DIN:<br />
Industrieroboter sind universell einsetzbare Bewegungsautomaten mit mehreren<br />
Achsen, deren Bewegungen hinsichtlich Bewegungsfolgen und -Wegen bzw. -<br />
Winkeln frei programmierbar und ggf. sensorgeführt sind. Sie sind mit Greifern,<br />
Werkzeugen oder anderen Fertigungsmitteln (allgemein einem Effektor)<br />
ausgerüstet und können Handhabungs- und / oder Fertigungsaufgaben<br />
ausführen.<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
Überblick (10)<br />
Geschichte<br />
• 33 v. Chr. – Heron von Alexandrien, Automatischer Altar<br />
• 231 – vierbeinige Laufmaschine, einem Rind (Niú) nachempfunden<br />
• 1738 Jacques de Vaucanson<br />
– Flötenspieler und Tamburinspieler<br />
– mechanische, musizierende Puppe in menschlicher Größe<br />
– Blasen in Flöte, Veränderung der Lippen und Zunge, Fingerbewegung<br />
• 1774 Pierre Jaquet-Droz & Jean-Frédéric Leschot<br />
– Zeichner, Schriftsteller und Musikerin<br />
• 1805 Joseph Maria Jacquard, program. Webstuhl (Lochkarten)<br />
• 1810 Johann Gottfried u. Friedrich Kaufmann, Trompeter<br />
• 1830 Christopher Spencer, nockengesteuerte Drehbank<br />
• 1893 Lewis. A. Rygg Patent für vierbeinigen Laufmechanismus basierend auf<br />
Koppelkurven<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
Überblick (11)<br />
Geschichte<br />
• 1938 Williard Pollard u. Harold Roselund, programmierbare Farb- und<br />
Lackiermaschine<br />
• 1954 Georg C. Devol, Patent für programmierbarer Manipulator<br />
(„Programmierter Transport von Gegenständen“)<br />
• 1959 Planet Corp. erster kommerzieller Roboter (Steuerung durch<br />
Kurvenscheiben & Begrenzungsschalter)<br />
• 1959/60 Devol u. J. F. Engelberger erster Industrieroboter Unimate“,<br />
hydraulisch angetrieben, Computersteuerung<br />
• 1961 Installation eines Roboters des Typs „Unimation“ bei Ford<br />
• 1968 Charles A. Ross, Shakey, Stanford Research Institute (SRI), USA<br />
– Vielzahl von Sensoren, u.a. Kamera, Tastsensor<br />
• 1970er Daimler-Benz, Sindelfingen, erste Industrieroboter<br />
• Erste Programmiersprache (WAVE) für Roboter am SRI entwickelt<br />
• 1974 Entwicklung der Sprache AL<br />
– Weiterverwendung von Unimation <strong>zur</strong> Programmiersprache VAL<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
Überblick (12)<br />
Geschichte<br />
• 1975 erster vollständig elektrisch angetriebener Roboter<br />
• 1978 Roboter Typ PUMA von Unimation (PUMA – Programmable Universal<br />
Machine for Assembly)<br />
– Elektrisch angetrieben<br />
– Basiert auf Entwürfen von General Motors<br />
• 1983 Moravec – CMU Rover<br />
• 1984 Kato, Wabot-2, Waseda Uni. Tokio, Japan<br />
• 1985 M.I.T 3-Finger Salisbury-Hand: halten, drehen, Fadenmaipulation<br />
• 1992 Brooks, Cruse, Pfeiffer – sechsbeinige Laufmaschinen<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
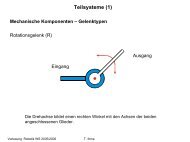
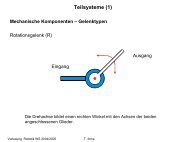
Überblick (13)<br />
Robotergenerationen<br />
0. Generation – Mechanismen<br />
• Speicherung von Bewegungsfolgen (räumlich, zeitlich) in mechanischer<br />
Konstruktion (z.B. Koppelgetriebe), Lochkarten und Stiftwalzen<br />
• Mechanische Puppen, Mechanismen<br />
1. Generation - programmierbare Manipulatoren / Maschinen, 1960 – 1975<br />
• geringe Rechenleistung, Kraftverstärkung von Bewegungsfolgen<br />
• nur feste Haltepunkte (Punkt-zu-Punkt-Programmierung)<br />
• kaum sensorielle Fähigkeiten (nur Pick-and-Place-Aktionen)<br />
2. Generation - adaptive Roboter, Automatisierung 1976 – 1982<br />
• mehr Sensoren (z.B. Kameras)<br />
• Anpassung an Umwelt<br />
• eigene Programmiersprachen (z.B. VAL)<br />
• geringe Roboter-Intelligenz (adaptiv: Aufgabendurchführung)<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
Überblick (14)<br />
Robotergenerationen<br />
3. Generation – Autonimie, Integration, ab 1983<br />
• hohe Rechenleistung (Multiprozessorsysteme)<br />
• Aufgabenorientierte Programmierung<br />
• Forderung nach (maschineller) Autonomie, Integration von Steuerfunktionen<br />
in den Roboter<br />
4. Generation – humanoid, AI-Konzepte<br />
• hohe Flexibilität bzgl. Umwelt und Aufgabe<br />
• Lernfähigkeit und Anpassungsfähigkeit<br />
• Selbstreflexion<br />
• Emotion<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
Überblick (15)<br />
Anwendungsgebiete von Robotern<br />
• Industrieroboter<br />
• Unterwasserroboter<br />
• Roboter im Bauwesen und Bergbau<br />
• Roboter in der Landwirtschaft und Forstwirtschaft<br />
• Rechnergestützte assistierende Robotersysteme<br />
• Persönliche Roboter in privater Umgebung<br />
• Roboter in der Chirurgie<br />
• Abfallbeseitigung, Reinigung<br />
• Abwasserrohrinspektion und –reparatur<br />
• Entertainment<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme
Überblick (16)<br />
Eingesetzte Industrieroboter<br />
in 2002<br />
• insgesamt 769.888<br />
• Japan 350.169<br />
• USA 103.515<br />
• Europa 233.139<br />
• Deutschland 105.217<br />
– Davon 11.870 in 2002<br />
Aufgabenverteilung<br />
• 25% Schweißen<br />
• 25% Materialtransport<br />
• 10% Plastik, Gussteile<br />
Verteilung in Industrie<br />
• 62% Autoindustrie<br />
• 8% chemische Industrie<br />
Vorlesung <strong>Robotik</strong> WS 2007<br />
T. Ihme