Teilsysteme (1)
Teilsysteme (1)
Teilsysteme (1)

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Teilsysteme</strong> (1)<br />
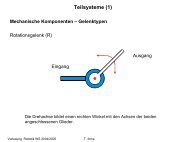
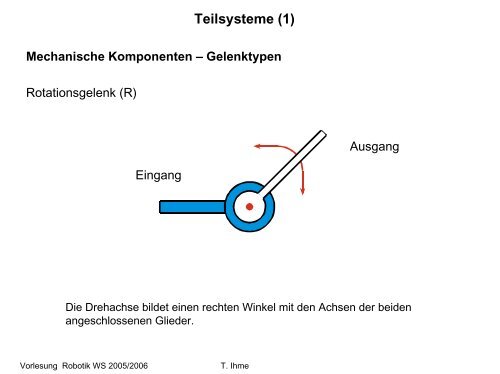
Mechanische Komponenten – Gelenktypen<br />
Rotationsgelenk (R)<br />
Ausgang<br />
Eingang<br />
Die Drehachse bildet einen rechten Winkel mit den Achsen der beiden<br />
angeschlossenen Glieder.<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (2)<br />
Mechanische Komponenten – Gelenktypen<br />
Torsionsgelenk (T)<br />
Eingang<br />
Ausgang<br />
Die Drehachse des Torsionsgelenks verläuft parallel zu den Achsen der beiden<br />
Glieder.<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (3)<br />
Mechanische Komponenten – Gelenktypen<br />
Revolvergelenk (V)<br />
Eingang<br />
Ausgang<br />
Das Eingangsglied verläuft parallel zur Drehachse, das Ausgangsglied steht im<br />
rechten Winkel zur Drehachse.<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (4)<br />
Mechanische Komponenten – Gelenktypen<br />
Lineargelenk (L)<br />
auch: Translationsgelenk, Schubgelenk oder prismatisches Gelenk<br />
Eingang<br />
Ausgang<br />
Lineargelenke bewirken eine gleitende oder fortschreitende Bewegung entlang<br />
der Achse.<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (5)<br />
Begriffserklärung<br />
Arbeitsraum:<br />
Der Arbeitsraum besteht aus denjenigen Punkten im 3-D Raum, die von der<br />
Roboterhand angefahren werden können. Hierzu sind drei Freiheitsgrade in<br />
der Bewegung, also mindestens drei Gelenke erforderlich.<br />
Grundform des Arbeitsraums:<br />
Die Grundform des Arbeitsraums ist der Arbeitsraum, der sich ergeben<br />
würde, wenn man die gegenseitige Behinderung der Arme des Roboters und<br />
die Begrenzung der Gelenkwinkel nicht berücksichtigt.<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (6)<br />
Koordinatensysteme<br />
Katesisches Koordinatensystem<br />
Z<br />
Zylinderkoordinatensystem<br />
Z<br />
X<br />
x<br />
z<br />
y<br />
P(, xy,z)<br />
Y<br />
Z<br />
X<br />
z<br />
r<br />
α<br />
P( α , r,z)<br />
Y<br />
r<br />
P( r,αβ , )<br />
X<br />
α<br />
β<br />
Kugelkoordinatensystem<br />
Y<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (7)<br />
Umrechnung zwischen den Koordinatensystemen<br />
Kartesische Koordinaten Zylinderkoordinaten<br />
(x,y,z) (α,r,z)<br />
2<br />
r = x +<br />
y<br />
2<br />
⎛<br />
α = tan⎜<br />
⎝<br />
z = z<br />
y ⎞<br />
⎟<br />
x ⎠<br />
Zylinderkoordinaten Kartesische Koordinaten<br />
(α,r,z) (x,y,z)<br />
x = r ⋅cos<br />
y = r ⋅sin<br />
z =<br />
z<br />
( α)<br />
( α)<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (8)<br />
Umrechnung zwischen den Koordinatensystemen<br />
Kartesische Koordinaten Kugelkoordinaten<br />
(x,y,z) (r,α,β)<br />
2 2<br />
r = x + y +<br />
z<br />
2<br />
α =<br />
⎛<br />
arctan⎜<br />
⎝<br />
y ⎞<br />
⎟<br />
x ⎠<br />
β =<br />
⎛<br />
arctan⎜<br />
⎜<br />
⎝<br />
x<br />
2<br />
z<br />
+<br />
y<br />
2<br />
⎞<br />
⎟<br />
⎟<br />
⎠<br />
Kugelkoordinaten Kartesische Koordinaten<br />
(r,α,β) (x,y,z)<br />
Vorlesung Robotik WS 2005/2006<br />
( α) ⋅ ( β)<br />
x = r ⋅cos<br />
cos<br />
( α) ⋅ ( β)<br />
( β)<br />
y = r ⋅cos<br />
sin<br />
z = r ⋅sin<br />
T. Ihme
<strong>Teilsysteme</strong> (9)<br />
Unterscheidung nach Grundformen des Arbeitsbereiches<br />
• Roboter mit kartesischen Koordinaten<br />
• Roboter mit Zylinderkoordinaten<br />
• SCARA-Roboter<br />
• Roboter mit Polarkoordinaten<br />
• Gelenkarm-Roboter<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (10)<br />
Roboter mit kartesischen Koordinaten (1)<br />
Hand<br />
L<br />
L<br />
L<br />
Arbeitsraum: Quader<br />
Typ: LLL<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (11)<br />
Roboter mit kartesischen Koordinaten (2)<br />
• Portalroboter<br />
L<br />
L<br />
L<br />
Hand<br />
Arbeitsraum: Quader<br />
Typ: LLL<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (12)<br />
Roboter mit Zylinderkoordiinaten<br />
V<br />
L<br />
L<br />
Hand<br />
Arbeitsraum: Hohlzylinder<br />
Typ: LVL<br />
Andere Typen: TLL, LTL<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (13)<br />
SCARA-Roboter<br />
• Selective Compliance Assembly Robot Arm<br />
• Mechanischer Aufbau: in Z-Richtung steif, in XY-Ebene nachgiebig<br />
• Besonders geeignet für Einsatzbewegung in Z-Richtung (Montage)<br />
L<br />
R<br />
R<br />
T<br />
Hand<br />
Arbeitsraum: Hohlzylinder<br />
Typ: RRLT<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (14)<br />
Roboter mit Polarkoordinaten<br />
Hand<br />
L<br />
R<br />
T<br />
Arbeitsraum: Hohlkugel<br />
Typ: TRL<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (15)<br />
Gelenkarm-Roboter<br />
R<br />
R<br />
Hand<br />
T<br />
Arbeitsraum: Hohlkugel<br />
Typ: TRR<br />
Andere Typen: VVR<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (16)<br />
Roboterhandgelenke<br />
• Ziel: Greifen von Gegenständen<br />
• Neben räumlicher Positionierung auch Orientierung des Greifers wichtig<br />
• Einstellung der Orientierung durch Handgelenke, montiert an Unterarm<br />
• Am Ende des Handgelenkes Flansch für Endeffektor<br />
• Beispiele: Greifer, Schrauber, Schweißzange, Spritz- oder Klebepistolen,<br />
Schleifscheiben, andere Instrumente<br />
• Handgelenke einschließlich Flansch auch als Handwurzel bezeichnet<br />
• Bisher bei Roboterkonfigurationen nicht dargestellt<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (17)<br />
Zwei übliche Formen für Handgelenke<br />
Prinzipieller Aufbau einer<br />
Hand vom Typ TRR<br />
Schwenkgelenk (R)<br />
Rollgelenk (T)<br />
Gelenk zum<br />
Aufrichten (R)<br />
Prinzipieller Aufbau einer<br />
Hand vom Typ TRT<br />
Flansch<br />
Rollgelenk (T)<br />
Gelenk zum<br />
Aufrichten (R)<br />
Torsionsgelenk (T)<br />
Flansch<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (18)<br />
Beispiel Gelenkarmroboter<br />
Beispiel eines Gelenkarmroboters mit 6 rotatorischen Freiheitsgraden.<br />
(Roboter der Firma KUKA)<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (19)<br />
Beispiel Gelenkarmroboter<br />
(TVRRRT)<br />
Beispiel eines<br />
Gelenkarmroboters<br />
Typ PUMA 560<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (20)<br />
Beispiel eines Arbeitsraumes<br />
Ansicht des RX90<br />
Horizontaler Schnitt des<br />
Arbeitsraumes (Draufsicht)<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (21)<br />
Antriebe<br />
• Fluidische Antriebe (Hydraulik, Pneumatik)<br />
– Lineargetriebe<br />
– Rotatorische Antriebe<br />
– Muskelartiger Antrieb<br />
• Elektrische Antriebe<br />
– Lineargetriebbe (hohes Baugewicht, geringe Vorschubgeschwindigkeit)<br />
– Rotatorische Antriebe<br />
• Gleichstromservomotoren (bürstenlos, bürstenbehaftet)<br />
• Wechselstromservomotoren<br />
• Schrittmotoren<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (22)<br />
Pneumatischer Antrieb<br />
Stellenergie<br />
• Komprimierte Luft, bewegt Kolben<br />
• Kein Getriebe<br />
Vorteile<br />
• Billig<br />
• Einfacher Aufbau<br />
• Schnelle Reaktionszeit<br />
• Auch in ungünstigen Umgebungen einsetzbar<br />
Nachteile<br />
• Laut<br />
• Keine Steuerung der Geschwindigkeit bei Bewegung (nur Punkt-zu-Punkt)<br />
• Luft ist kompressibel schlechte Positioniergenauigkeit<br />
Eiinsatz<br />
• Kleinere Roboter mit schnellen Arbeitszyklen und wenig Kraft<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (23)<br />
Hydraulischer Antrieb<br />
Stellenergie<br />
• Öldruckpumpe und steuerbare Ventile<br />
Vorteile<br />
• Sehr große Kräfte<br />
• Mittlere Geschwindigkeit<br />
Nachteile<br />
• Laut<br />
• Zusätzlicher Platz für Hydraulik<br />
• Ölverlust führt zu Verunreinigung<br />
• Ölviskosität erlaubt keine guten Reaktionszeiten und keine hohen Positionierund<br />
Wiederholgenauigkeiten<br />
Einsatz<br />
• Große Roboter mit viel Kraft<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (24)<br />
Elektrischer Antrieb<br />
Stellenergie<br />
• Schritt- oder Servomotoren<br />
Vorteile<br />
• Wenig Platzbedarf<br />
• Kompakt, ruhig<br />
• Gute Regelbarkeit der Drehzahl und des Drehmoments<br />
• Hohe Positionier- und Wiederholgenauigkeit Abfahren von Flächen oder<br />
gekrümmten Bahnen präzise möglich<br />
Nachteile<br />
• Wenig Kraft<br />
• Keine hohen Geschwindigkeiten<br />
Einsatz<br />
• Roboter für Präzisionsarbeiten<br />
• Zunehmende Verbreitung für universellen Einsatz<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (25)<br />
Vorwärtskinematik<br />
• Gelenkkoordinaten werden vorgegeben<br />
• Alle Gelenke bewegen sich simultan von Startzustand in den Zielzustand<br />
• Bahnbewegung der Hand nicht bekannt<br />
• Bei maximaler Gelenkgeschwindigkeit nicht alle Gelenke gleichzeitig am Ziel<br />
• Deshalb interpolierte Gelenkbewegung<br />
– Regelung der Geschwindigkeit aller Gelenkt durch lineare<br />
Zeitinterpolation<br />
Alle Gelenke gleichzeitig in Zielposition<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (26)<br />
Rückwärtskinematik<br />
• Effektorstellung wird angegeben, die Roboter anfahren oder durchfahren soll<br />
• Aus Raumkoordinaten müssen die Gelenkkoordinaten berechnet werden<br />
• Hohe Rechenleistung notwendig<br />
• Muss in Echtzeit durchgeführt werden<br />
• Lösungen sind in der Regel nicht eindeutig<br />
• Mögliche Bewegungen<br />
– Punkt-zu-Punkt-Bewegung<br />
• Bahn zwischen Punkten nicht bekannt<br />
– Interpolierte Bewegung<br />
• Bewegung möglichst genau auf einer Verbindungslinie von<br />
Ausgangspunkt zu Zielpunkt<br />
• Ansteuerung von vielen Zwischenpunkten auf der Bahn (z.B. im<br />
10ms-Takt)<br />
• Für jeden Zwischenpunkt eigene Rückwärtsrechnung erforderlich<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (27)<br />
Teach-In<br />
• Benutzer steuert manuell eine Folge von Zielpunkten<br />
• Speicherung der Gelenkstellungen<br />
• Es ergibt sich eine Punkt-zu-Punkt-Bewegung<br />
• Abfahren der („geteachten“) Gelenkstellungen zur Reproduktion der Bewegung<br />
Andere Verfahren<br />
• Lernen durch Vormachen<br />
– Bewegungen erfolgen so, dass Sensorwerte reproduziert werden<br />
– Verwendung für geringe Anzahl von Wiederholungen<br />
• Visual servoing<br />
– Externe Kamera oder Hand-montierte Kamera<br />
– Steuerung der Bewegungen derart, dass vorgegebene Szenen reproduziert<br />
werden<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (28)<br />
Gelenkregelung<br />
• Roboter ist bewegtes System von Massen<br />
• Für Bewegung müssen Massen beschleunigt und abgebremst werden<br />
• Erreichen eines Zielpunktes möglichst präzise und schnell<br />
• Bei Zwischenpunkten: Roboter soll diese Punkte mit einer vorgegebenen<br />
Geschwindigkeit zu vorgegebener Zeit in vorgegebener Richtung durchfahren<br />
• Am Zielpunkt: Roboter soll stehen, d.h. Geschwindigkeit=0<br />
• Einfachster Fall:<br />
– konstante Beschleunigung bis Sollgeschwindigkeit<br />
– Konstante Verzögerung vor Ziel<br />
Rampenförmiger Geschwindigkeitsverlauf<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (29)<br />
Gelenkregelung<br />
ω<br />
Maximale Geschwindigkeit<br />
Reale Geschwindigkeit<br />
Ausgangsstellung<br />
Zielstellung<br />
t<br />
Beispiel für Geschwindigkeitsverlauf bei Gelenkbewegung<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (30)<br />
Gelenkregelung<br />
• Sollstellung und Sollgeschwindigkeit der Gelenke zu jedem Zeitpunkt bekannt<br />
– Bewegungsplanung, Interpolation, Sollwertvorgabe durch Sensorbasierte<br />
Steuerung<br />
• Iststellung der Gelenke wird durch Winkelgeber, Inkrementalgeber oder<br />
andere Sensoren erfasst<br />
• Entsprechend wird die Istgeschwindigkeit erfasst<br />
• Differenz zwischen Soll- und Iststellung geht in Regelkreis ein, durch den<br />
Bewegung geregelt wird<br />
• Entsprechend wird mit Soll- und Istgeschwindigkeit verfahren, falls<br />
Geschwindigkeit geregelt wird<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (31)<br />
Gelenkregelung<br />
Ziel der Regelung<br />
• Schnelle Armbewegungen<br />
• Bewegung entlang vorgegebener Bahn ohne Abweichung, z.B.<br />
Schwingungen<br />
• Kein Überschwingen bei engen Kurven oder am Ziel<br />
• Adaption von Lasten (Nutzlasten)<br />
• Halten des Arms mit Last am Ziel<br />
• Kein Abdriften aufgrund des Lastgewichtes<br />
Ziele sind gegeneinander nicht widerspruchsfrei<br />
Kompromisse<br />
Realisierung nur mit Einschränkungen<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (32)<br />
Gelenkregelung<br />
Realisierung eines Gelenkreglers<br />
• Es werden drei Grundverhalten bzw. Kombinationen daraus unterschieden<br />
– P – proportional<br />
– I – integral<br />
– D – differential<br />
• Rückkopplung über einen Regler<br />
• Grundlegendes Ziel: Stabilität des geschlossenen Regelkreises<br />
• Weitere Ziele: schnelles Ausregeln, geringes Überschwingen<br />
• Entsprechend des Verhaltens der Regelstrecke werden P-, PI-, PD- oder PID-<br />
Regler benutzt ( Reglerentwurf)<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (33)<br />
Gelenkregelung<br />
Grundform eines Regelkreises<br />
x soll<br />
-<br />
Regler<br />
Regelstrecke<br />
Grundsätzliches Verhalten eines Regelkreises<br />
Position<br />
Sollposition<br />
Zeit<br />
überschwingend<br />
aperiodisch<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (34)<br />
Effektoren<br />
• An der Handwurzel angeflanschte Werkzeuge<br />
• Beispiele: Greifer, Bohrer, Schweißgerät<br />
• Steuerung der Effektoren erforderlich<br />
– Öffnen / Schließen Greifer<br />
– Ein- / Ausschalten Schweißstrom<br />
• Erfassen des Zustandes von Effektoren durch Sensoren<br />
– Offnungsweite, Schweißkraft eines Greifers<br />
• Steuerung mittels Mikrocontroller oder PCs<br />
• Befehle oder Prozeduren zur Steuerung des Effektors in<br />
Roboterprogrammiersprache<br />
• Asynchrone Meldung wichtiger Zustandsänderungen des Effektors an<br />
Robotersteuerrechner<br />
– Z.B. bei Überwachung des Festhaltens eines Werkstückes während der<br />
Roboterbewegung<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (35)<br />
Beispiel für ein<br />
Effektorwechselsystem<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (36)<br />
Sensoren<br />
Interne Sensoren<br />
• Messen Zustandsgrößen des Roboters<br />
– Stellung der Gelenke<br />
– Geschwindigkeit, mit der sich Gelenke bewegen<br />
– Kräfte und Momente, die auf Gelenke einwirken<br />
Externe Sensoren<br />
• Erfassen Eigenschaften der Umwelt<br />
– Entfernungen<br />
– Lage und Positionsmarken von externen Objekten<br />
– Kontur von Objekten<br />
– Pixelbilder der Umwelt (CCD-Kamera)<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (37)<br />
Programmiersystem<br />
• Aktuelle Industrieroboter sind programmierbar<br />
• Programmierumgebung umfasst<br />
– Gesamte Hardware und Software zur Programmerstellung und<br />
–ausführung<br />
– Komplexe Applikationen entstehen durch Einbindung zusätzlicher Geräte,<br />
Sensoren, Anschluss an externe Leitrechner und Simulationssysteme<br />
• Robotersteuerung besteht aus Hardware und Software, die folgenden Zwecken dient<br />
– Entgegennahme von Roboterbefehlen und –programmen<br />
– Abarbeitung von Bewegungskommandos, z.B. Zerlegen in Bewegungsinkremente<br />
– Weiterleitung der Inkremente an Gelenkregler<br />
• Software im Robotersteuerrechner<br />
– Roboterbetriebssystem<br />
– Interpreter für Roboterbefehle<br />
– Dienstprogramme<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (38)<br />
Programmiersystem<br />
Dienstprogramme<br />
Kommandointerpreter (Shell)<br />
Editor, Übersetzer<br />
Interpreter für Roboterbefehle<br />
Roboterbetriebssystem<br />
Datei-, Speichermanagement, Ein-/Asgabe<br />
Interrupts, Prozessmanagement<br />
Rechner Regelung Ein-/Ausgabe<br />
Signale<br />
an die<br />
Gelenkantriebe<br />
Signale<br />
von den<br />
internen<br />
Sensoren<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (39)<br />
Programmiersystem<br />
Das Roboterbetriebsssystem organisiert<br />
• Den Ablauf der Programme<br />
• Zugriff auf Speicher und Dateien<br />
• Prozesskoordination<br />
• Über Ein-/Ausgabeschnittstelle<br />
– Anschluss von Peripheriegeräten, Sensoren<br />
– Anschluss von Leitrechnern<br />
– Zugang zu Rechnernetzen<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (40)<br />
Programmiersystem<br />
Der Interpreter<br />
• Verantwortlich für Ausführung einzelner roboterorientierter Anweisungen<br />
• Zerlegt Bewegungen in Folge von Zwischenpositionen (Interpolation)<br />
• Interpolationstakt z.B. bei RX90 ist 16ms<br />
• Leitet Bewegungsinkremente an Regelung weiter<br />
• Bei einfachen Robotersteuerngen: Interpreter ist Bestandteil des<br />
Betriebssystems<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (41)<br />
Programmiersystem<br />
Trajektorien im Interpolationstakt<br />
• Spezifikation der Roboterbahn normalerweise auf Ebene der<br />
Roboterprogrammiersprachen<br />
• Manchmal zusätzlich die Möglichkeit, direkt oberhalb der Steuerungs- und<br />
Regelungsebene der Gelenke die Trajektorien für Endeffektor vorzugeben<br />
• Durch Angabe von (sehr vielen) nahezu jede Bahn erzwingbar<br />
• Allerdings mühsam und meist an Grenzen der Rechnerleistung und<br />
Speicherkapazität<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (42)<br />
Beispiel für ein Robotersystem<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme
<strong>Teilsysteme</strong> (43)<br />
Beispiel für ein Robotersystem<br />
• Im Gesamtsystem bestehen einzelne harte Echtzeitanforderungen mit<br />
Antwortzeiten im ms-Bereich (werden durch handelsübliche Rechner /PCs<br />
erfüllt)<br />
• Externe Sensoren, Aktoren bzw. Effektoren werden durch eigene<br />
Steuerrechner bedient<br />
• Steuerrechner für Aktoren, Sensoren – Einschubkarten, kleinere PCs oder<br />
Mikrocontroller an Steuerrechner angeschlossen<br />
• PC läuft mit Echtzeit-Betriebssystem (z.B. LynxOS, auf Unix-Basis),<br />
übernimmt Sensorverarbeitung, Echtzeitsteuerung des Roboters und<br />
Synchronisation zwischen kooperierenden Robotern<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme