Teilsysteme (1)
Teilsysteme (1)
Teilsysteme (1)

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
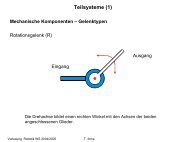
<strong>Teilsysteme</strong> (28)<br />
Gelenkregelung<br />
• Roboter ist bewegtes System von Massen<br />
• Für Bewegung müssen Massen beschleunigt und abgebremst werden<br />
• Erreichen eines Zielpunktes möglichst präzise und schnell<br />
• Bei Zwischenpunkten: Roboter soll diese Punkte mit einer vorgegebenen<br />
Geschwindigkeit zu vorgegebener Zeit in vorgegebener Richtung durchfahren<br />
• Am Zielpunkt: Roboter soll stehen, d.h. Geschwindigkeit=0<br />
• Einfachster Fall:<br />
– konstante Beschleunigung bis Sollgeschwindigkeit<br />
– Konstante Verzögerung vor Ziel<br />
Rampenförmiger Geschwindigkeitsverlauf<br />
Vorlesung Robotik WS 2005/2006<br />
T. Ihme