Laplace-Transformation
Laplace-Transformation
Laplace-Transformation

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
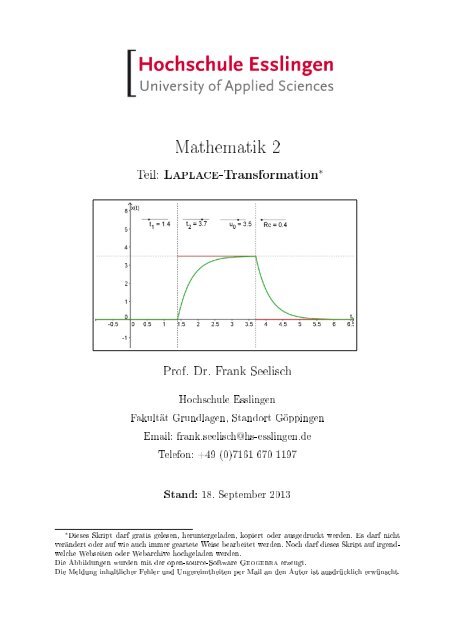
Mathematik 2<br />
Teil: <strong>Laplace</strong>-<strong>Transformation</strong> ∗<br />
Prof. Dr. Frank Seelisch<br />
Hochschule Esslingen<br />
Fakultät Grundlagen, Standort Göppingen<br />
Email: frank.seelisch@hs-esslingen.de<br />
Telefon: +49 (0)7161 670 1197<br />
Stand: 18. September 2013<br />
∗ Dieses Skript darf gratis gelesen, heruntergeladen, kopiert oder ausgedruckt werden. Es darf nicht<br />
verändert oder auf wie auch immer geartete Weise bearbeitet werden. Noch darf dieses Skript auf irgendwelche<br />
Webseiten oder Webarchive hochgeladen werden.<br />
Die Abbildungen wurden mit der open-source-Software Geogebra erzeugt.<br />
Die Meldung inhaltlicher Fehler und Ungereimtheiten per Mail an den Autor ist ausdrücklich erwünscht.
Inhaltsangabe<br />
Die <strong>Laplace</strong>-<strong>Transformation</strong> erlaubt es, lineare Dierentialgleichungen höherer Ordnung,<br />
Anfangswertprobleme, ja sogar lineare Dierentialgleichungssysteme elegant zu lösen.<br />
Dabei wird das Ausgangsproblem in den sogenannten Frequenzbereich übersetzt,<br />
dort gelöst und das Ergebnis dann zurücktransformiert.<br />
Wir können auÿerdem mittels der sogenannten Übertragungsfunktion und der Faltungsoperation<br />
auf einfache Weise den Zusammenhang zwischen Eingangs- und Ausgangssignalen<br />
linearer Systeme untersuchen.<br />
Inhaltsverzeichnis<br />
1 Einführung 1<br />
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1<br />
1.1.1 Vor- und Nachteile . . . . . . . . . . . . . . . . . . . . . . . . . . . 1<br />
1.1.2 Geeignete Problemstellungen . . . . . . . . . . . . . . . . . . . . . . 3<br />
1.1.3 Lineare Dierentialgleichungssysteme . . . . . . . . . . . . . . . . . 3<br />
1.1.4 Zusammenhang zwischen Eingangs- und Ausgangssignal . . . . . . 4<br />
1.1.5 Wiederholung: Rechnen im Wechselstromkreis . . . . . . . . . . . . 5<br />
1.2 Grundlegende Signale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7<br />
1.2.1 Die Einheitssprungfunktion . . . . . . . . . . . . . . . . . . . . . . 7<br />
1.2.2 Die Einheitsimpulsfunktion . . . . . . . . . . . . . . . . . . . . . . 8<br />
1.2.3 Zusammenhang zwischen Sprung- und Impulsfunktion . . . . . . . . 9<br />
1.2.4 Einsetzregel und Ausblendeigenschaft der DIRAC-Funktion . . . . 11<br />
1.2.5 Verallgemeinerte Ableitungen . . . . . . . . . . . . . . . . . . . . . 11<br />
2 Die LAPLACE-<strong>Transformation</strong> 12<br />
2.1 Denition und erste Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . 13<br />
2.1.1 Denition der <strong>Laplace</strong>-<strong>Transformation</strong> . . . . . . . . . . . . . . . 13<br />
2.1.2 Die Rücktransformationsformel . . . . . . . . . . . . . . . . . . . . 14<br />
2.1.3 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14<br />
3 Wichtige Sätze zur <strong>Laplace</strong>-<strong>Transformation</strong> 15<br />
3.1 Linearität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15<br />
3.2 Dämpfung im t-Bereich, Verschiebung im s-Bereich . . . . . . . . . . . . . 15<br />
3.3 Verschiebung im t-Bereich, Dämpfung im s-Bereich . . . . . . . . . . . . . 16<br />
3.4 Ähnlichkeitssatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16<br />
3.5 Dierentiation im t-Bereich . . . . . . . . . . . . . . . . . . . . . . . . . . 17<br />
3.6 Dierentiation im s-Bereich . . . . . . . . . . . . . . . . . . . . . . . . . . 18<br />
3.7 Integration im t-Bereich . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19<br />
3.8 Anfangs- und Endwerte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20<br />
4 Die Faltung 20<br />
4.1 Denition und Eigenschaften . . . . . . . . . . . . . . . . . . . . . . . . . . 21<br />
4.1.1 Denition des Faltungsprodukts . . . . . . . . . . . . . . . . . . . . 21
INHALTSVERZEICHNIS 3<br />
4.1.2 Eigenschaften der Faltung . . . . . . . . . . . . . . . . . . . . . . . 21<br />
4.1.3 Faltung bei endlichen Träger . . . . . . . . . . . . . . . . . . . . . . 22<br />
4.2 Der Zusammenhang von Multiplikation und Faltung . . . . . . . . . . . . . 22<br />
5 Lösen linearer Dierentialgleichungen 23<br />
5.1 Allgemeines Lösungsschema . . . . . . . . . . . . . . . . . . . . . . . . . . 23<br />
5.1.1 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24<br />
5.2 Anfangswerte für t ≠ 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24<br />
5.3 Spezielle Anregungssignale . . . . . . . . . . . . . . . . . . . . . . . . . . . 24<br />
5.3.1 Zusammenhang der Lösungen für die Einheitsfunktionen . . . . . . 25<br />
6 Lösen linearer Dierentialgleichungssysteme 25<br />
6.1 Vorgehensweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25<br />
6.1.1 Lösung des Doppelpendelsystems . . . . . . . . . . . . . . . . . . . 26<br />
6.1.2 Weiteres Übungsbeispiel . . . . . . . . . . . . . . . . . . . . . . . . 27<br />
7 Die Ein-Ausgabe-Relation eines linearen Systems 28<br />
7.1 Problemstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28<br />
7.2 Allgemeine Betrachtungen . . . . . . . . . . . . . . . . . . . . . . . . . . . 28<br />
7.3 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30<br />
7.3.1 Das R − c − Glied . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
1 EINFÜHRUNG 1<br />
1 Einführung<br />
Die <strong>Laplace</strong>-<strong>Transformation</strong> geht zurück auf den berühmten französischen Mathematiker<br />
Pierre-Simon <strong>Laplace</strong>, der von 1749-1827 lebte und in der Zeit nach der Französischen<br />
Revolution sogar für einige Monate Innenminister unter Napoleon war.<br />
1.1 Motivation<br />
Die <strong>Laplace</strong>-<strong>Transformation</strong> ermöglicht es uns, ein gegebenes mathematisches Problem<br />
der Regelungs- oder Elektrotechnik in eine andere mathematische Spiegelwelt zu übersetzen;<br />
wir sagen zu transformieren. Dort kann das neue Problem dann mit weniger Aufwand<br />
gelöst werden.<br />
Zur Veranschaulichung der Idee der Spiegelwelt siehe die Illustration zu Lewis Carrolls<br />
Through the Looking Glass; http://de.wikipedia.org/wiki/Datei:Tenniel,_Through_The_<br />
Looking-Glass.gif.<br />
Abbildung 1: Alice geht durch den Spiegel<br />
Abbildung 2 illustriert die Hauptidee, die wir mit Hilfe der <strong>Laplace</strong>-<strong>Transformation</strong> verfolgen:<br />
Wir möchten durch Wechsel in eine mathematische Spiegelwelt eine Problemvereinfachung<br />
erreichen und dann das gegebene, in aller Regel schwierige Problem alternativ<br />
lösen entlang der rot beschrifteten Pfeile. Dabei soll der eigentliche Lösungsaufwand in<br />
der Spiegelwelt einfacher als zuvor sein.<br />
1.1.1 Vor- und Nachteile<br />
⊕ Die <strong>Transformation</strong> wird in aller Regel einfach zu bewerkstelligen sein. Zudem existieren<br />
<strong>Transformation</strong>stabellen, die diesen Teil weiter vereinfachen.
1 EINFÜHRUNG 2<br />
Abbildung 2: Alternativer Lösungsweg mittels <strong>Laplace</strong>-<strong>Transformation</strong><br />
⊕ Wie erwähnt ist das Lösen im s-Bereich einfach trotz des Fakts dass nun s ∈ C ist.<br />
⊖ Die Rücktransformation ist oft nicht so einfach. Aber wie im ersten Pluspunkt bereits<br />
erwähnt, können wir hierbei Tabellen verwenden.<br />
Insgesamt ist zu bemerken, dass der gesamte Prozess des Lösens des Ausgangsproblems<br />
nun sehr verschieden vom direkten Lösen ist. Denken wir z.B. an eine lineare Dierentialgleichung<br />
höherer Ordnung mit konstanten Koezienten: Beim ursprünglichen Lösungsverfahren<br />
sucht verfährt man in mehreren Schritten;<br />
1. Lösen des charakteristischen Polynoms,<br />
2. Fundamentallösungen bzw. homogene Lösung y hom ,<br />
3. Störgliedansatz zum Aunden einer Partikulärlösung y p (dabei auf Resonanz achten!),<br />
4. Gesamtlösung als Summe von y hom und y p .<br />
Der neue Rechenweg über die <strong>Laplace</strong>-<strong>Transformation</strong> sieht dagegen komplett anders<br />
aus. Allerdings tritt auch hier - und zwar ganz automatisch - das charakteristische Polynom<br />
in Erscheinung. Wir müssen aber bei diesem Weg nicht mehr auf Resonanz achten:
1 EINFÜHRUNG 3<br />
Die <strong>Laplace</strong>-<strong>Transformation</strong> beachtet diesen Sonderfall ganz automatisch selbst und<br />
nimmt uns hier etwas Denkarbeit ab.<br />
1.1.2 Geeignete Problemstellungen<br />
Welche mathematischen Problemstellungen könen wir nun tatsächlich geschickt mit Hilfe<br />
der <strong>Laplace</strong>-<strong>Transformation</strong> lösen?<br />
Typische Anwendungsszenarien bieten die folgenden Aufgabenstellungen:<br />
• gewöhnliche lineare Dierentialgleichungen höherer Ordnung mit konstanten Koezienten<br />
(Wie oben erwähnt, muss dabei nicht mehr auf Resonanz geachtet werden.),<br />
• Anfangswertprobleme (Die Anfangswerte gehen dabei direkt während der Übersetzung,<br />
d.h. der <strong>Transformation</strong> des Ausgangsproblem ein.),<br />
• lineare Dierentialgleichungssysteme mit konstanten Koezienten und schlieÿlich<br />
die<br />
• Untersuchung des Zusammenhangs zwischen Eingangs- und Ausgangssignal bei elektrischen<br />
Elementen wie z.B. dem R − c − Glied.<br />
Bevor wir beginnen, uns die eigentliche <strong>Transformation</strong> anzuschauen und gegebene Probleme<br />
tatsächlich zu lösen, werfen wir einen Blick auf die letzten beiden Aufgabenstellungen,<br />
um zu verstehen, worum es dabei geht.<br />
1.1.3 Lineare Dierentialgleichungssysteme<br />
Ein einfaches Beispiel für ein lineares Dierentialgleichungssystem mit konstanten Koef-<br />
zienten ergibt sich aus der Betrachtung des Doppelpendels, siehe Abbildung 3.<br />
Dabei werden zwei normale Fadenpendel (I) und (II) über eine Feder miteinander gekoppelt.<br />
Weiterhin nehmen wir der Einfachheit halber an, dass beide Pendel die selbe<br />
Fadenlänge l und Masse m besitzen und dass die Auslenkungswinkel α und β klein sind,<br />
d.h. nicht gröÿer als 10 ◦ .<br />
Wir machen für jedes Pendel den Kraftansatz<br />
Gesamtkraft = Reibkraft + Gewicht + Federkraft<br />
und erhalten die beiden Dierentialgleichungen<br />
(I) m · l · α ..<br />
= −ν · l · α .<br />
− m · g · α − k · l · (α − β),<br />
(II) m · l · β ..<br />
= −ν · l · β .<br />
− m · g · β − k · l · (β − α).<br />
Dabei ist k die Federkonstante, g die Fallbeschleunigung und ν der Reibkoezient, wobei<br />
wir von sogenannter Stokesscher Reibung ausgehen, d.h. von einer Reibkraft, die sich<br />
proportional zur Geschwindigkeit verhält.<br />
Man sieht, dass beide gesuchten Funktionen, nämlich die Zeit-abhängigen Auslenkungswinkel<br />
α(t) und β(t), in beiden Dierentialgleichungen vorkommen. Dadurch wird das
1 EINFÜHRUNG 4<br />
Abbildung 3: Zwei normale, über eine Feder gekoppelte Fadenpendel<br />
Problem zu einem sogenannten Dierentialgleichungssystem. Wir können hier nicht mehr<br />
einfach eine Gleichung verwenden, um eine Unbekannte zu bestimmen.<br />
Wir werden später sehen, dass das transformierte Problem ein lineares Gleichungssystem<br />
mit zwei Gleichungen und zwei Unbekannten und somit leicht zu lösen ist.<br />
1.1.4 Zusammenhang zwischen Eingangs- und Ausgangssignal<br />
Um auch diese Aufgabenstellung kurz zu erklären, betrachten wir ein sogenanntes R −<br />
c − Glied im Wechselstromkreis; siehe Abbildung 4.<br />
Abbildung 4: R − c − Glied im Wechselstromkreis<br />
Wir können die über der gesamten Strecke angelegte Spannung u in als Eingangssignal<br />
des R − c − Glieds betrachten. Dann stellt sich über dem Kondensator ein bestimmtes
1 EINFÜHRUNG 5<br />
Ausgangssignal u out ein.<br />
Wir werden sehen, dass wir mit Hilfe der <strong>Laplace</strong>-<strong>Transformation</strong> den Zusammenhang<br />
zwischen diesen beiden Signalen einfach studieren und verstehen können. So ergibt sich<br />
im Fall einer Rechteck-förmigen Eingangsspannung u 0 , die zwischen den Zeitpunkten t 1<br />
und t 2 angelegt wird, eine Ausgangsspannung wie in Abbildung 5 in grün dargestellt. Die<br />
grüne Kurve ist dabei noch abhängig vom Produkt des Ohmschen Widerstands R und<br />
der Kapazität c.<br />
Abbildung 5: Rechteck-förmiges Eingangssignal und resultierendes Ausgangssignal<br />
1.1.5 Wiederholung: Rechnen im Wechselstromkreis<br />
Dieser Abschnitt ist reine Wiederholung und illustriert noch einmal, dass für das Rechnen<br />
im Wechselstromkreis die komplexen Zahlen C gut geeignet sind.<br />
Es ist daher nicht verwunderlich, wenn wir im s-Bereich mit einer komplexwertigen Variablen<br />
s rechnen (, auch wenn wir dies nur selten beim Rechnen beachten müssen oder<br />
überhaupt merken werden).<br />
Zur Wiederholung betrachten wir einen Ohmschen Widerstand und - dieses Mal dazu<br />
parallel geschaltet - einen Kondensator; siehe Abbildung 6.<br />
Es sei die Wechselspannung<br />
u(t) = A · cos (ωt)<br />
an die Schaltung angelegt. Wir suchen den resultierenden Stromverlauf i(t).<br />
Lösung:<br />
1. Schritt: Wir übersetzen u(t) und das gesuchte i(t) in komplexe Gröÿen:<br />
u C (t) := A · e jωt ,<br />
i C (t) gesucht.
1 EINFÜHRUNG 6<br />
Abbildung 6: Ohmscher Widerstand und Kondensator parallel geschaltet<br />
Die komplexen Zahlen C spielen hier also die Rolle der Spiegelwelt. (Dies ist aber nicht<br />
die Spiegelwelt, in der wir uns bei der <strong>Laplace</strong>-<strong>Transformation</strong> bewegen werden.) Dann<br />
gelten die Rücktransformationsregeln<br />
u(t) = Re (u C (t)) und i(t) = Re (i C (t)) .<br />
2. Schritt: Nun müssen wir die realen Wiederstände in komplexe Widerstände, die sogenannten<br />
Impendanzen übertragen: Statt R und c haben wir nun z R und z c mit folgenden<br />
Formeln:<br />
z R = R, z c = 1<br />
jcω .<br />
3. Schritt: Wir berechnen nun die Gesamtimpedanz. Dabei verwenden wir das Gesetz für<br />
die Parallelschaltung von Wiederständen, die auch für Impedanzen gilt, d.h.<br />
1<br />
= 1 + 1 = 1 z ges z R z c R + jcω<br />
4. Schritt: Jetzt können wir mit Hilfe des Ohmschen Gesetzes für Impedanzen<br />
den Strom berechnen:<br />
i C = u C<br />
z ges<br />
=<br />
z = u C<br />
i C<br />
( )<br />
( )<br />
1 A<br />
R + jcω · A · e jωt =<br />
R + j · cωA · e jωt .<br />
Es fällt auf, dass die Klammer gar nicht von der Zeit t, sondern nur von unseren Ausgangsparametern<br />
A, R, c und ω abhängt. Somit ist auch der Strom i C (t) eine Kreisschwingung<br />
mit der gleichen Kreisfrequenz ω also analog zu u C (t). Lediglich die Anfangszeiger<br />
sind unterschiedlich, nämlich für die Spannung gleich A und für den Strom gleich<br />
( A<br />
R + j · cωA) ; siehe Abbildung 7.
1 EINFÜHRUNG 7<br />
5. Schritt: Um i(t) zu berechnen, empehlt es sich, den Anfangszeiger von i C (t) in Exponentialdarstellung<br />
zu bringen:<br />
A<br />
R + j · cωA =: r · ejφ ,<br />
wobei r = A √ 1/R 2 + c 2 und φ = arctan(cωA/(A/R)) = arctan(cωR). Dann folgt<br />
i C (t) = r · e j(ωt+φ) bzw. i(t) = Re(i C (t)) = r · cos (ωt + φ).<br />
Abbildung 7: Anfangszeiger von Spannung (rot) und Strom (grün)<br />
1.2 Grundlegende Signale<br />
1.2.1 Die Einheitssprungfunktion<br />
Denition 1 (Sprung- oder HEAVISIDE-Funktion)<br />
Die Funktion<br />
σ : R \ {0} → {0, 1}<br />
{ 0, t < 0,<br />
t ↦→<br />
1, t > 0<br />
heiÿt Einheitssprungfunktion oder kurz Sprungfunktion oder HEAVISIDE-<br />
Funktion.<br />
Oliver Heaviside war ein britischer Mathematiker und Physiker und lebte von 1850-1925.<br />
Diese Funktion ist also an der Stelle t = 0 gar nicht deniert. Wir werden sehen, dass in<br />
der Theorie der <strong>Laplace</strong>-<strong>Transformation</strong> einzelne Funktionswerte keine Rolle spielen, da<br />
es immer um den zeitlichen Verlauf von Signalen geht. Und für diese ist es nicht wichtig,
1 EINFÜHRUNG 8<br />
was zu einem ganz bestimmten Zeitpunkt passiert. Insofern ist es nur konsequent, dass<br />
wir σ(t) für t = 0 gar nicht denieren.<br />
Die HEAVISIDE-Funktion modelliert also den Wechsel vom Nullniveau auf ein bestimmtes<br />
Nichtnullniveau. Und klar; wenn wir σ(t) mit einer Konstante multiplizieren, können<br />
wir jeden Wert für t > 0 erzwingen.<br />
Für a > 0 ist σ(t − a) natürlich die um a nach rechts verschobene Sprungfunktion; siehe<br />
Abbildung 8 für einige einfache Beispiele.<br />
Abbildung 8: Einige einfache Sprungfunktionen<br />
Durch Kombination mehrerer Terme der Form a · σ(t − b) können wir beliebige Treppenfunktionen<br />
zusammenbauen.<br />
Beispiel 1<br />
a) σ(t − a) − σ(t − b) für beliebige a, b ∈ R mit 0 < a < b<br />
b) 3σ(t) + 2σ(t − 2) − 4σ(t − 3)<br />
c) (1 − t) · (σ(t + 1) − σ(t)) + t · (σ(t) − σ(t − 1))<br />
1.2.2 Die Einheitsimpulsfunktion<br />
Wir betrachten die Funktionenschar<br />
r a (t) := 1 (σ(t) − σ(t − a)) ,<br />
a<br />
für a > 0.<br />
Abbildung 9 zeigt einen typischen Vertreter mit Nichtnullniveau 1/a und einer Intervalllänge<br />
a, auf der die Nichtnullwerte angenommen werden. Es folgt also direkt für die Fläche<br />
unter dem Rechtecksignal r a :<br />
∫ ∞<br />
−∞<br />
r a (t) dt = 1.
1 EINFÜHRUNG 9<br />
Abbildung 9: Rechteckfunktion r a (t) mit konstanter Fläche 1<br />
Nun lassen wir a gegen 0 + gehen und erhalten die Einheitsimpulsfunktion<br />
{ ∞, t = 0,<br />
δ(t) :=<br />
0, t ≠ 0 ,<br />
wobei das ∞ so gewählt wird, dass die Fläche immernoch 1 ergibt, d.h.<br />
∫ ∞<br />
−∞<br />
δ(t) dt = 1.<br />
Achtung! Die hier gegebene Herleitung bzw. Denition der Einheitsimpulsfunktion ist<br />
mathematisch nicht korrekt, schon allein, weil ∞ kein zulässiger Funktionswert ist. Eine<br />
korrekte Herleitung bedarf Vorwissen aus anderen mathematischen Disziplinen, auf das<br />
wir hier nicht näher eingehen wollen.<br />
Die Einheitsimpulsfunktion wird auch kurz als Impulsfunktion oder - zu Ehren von<br />
Paul Dirac, einem englischen Quantenphysiker und Nobelpreisträger (1902-1984) - als<br />
DIRAC-Funktion bezeichnet. Daher rührt auch die Bezeichnung delta.<br />
Man stellt sich die DIRAC-Funktion am besten als einen zeitlich sehr kurzen Impuls<br />
von sehr groÿer Amplitute vor, d.h. als r a (t) mit sehr kleinem a > 0. Um das Schaubild<br />
von δ(t) in einem Koordinatensystem darzustellen wird ein Vektorpfeil verwendet. Auch<br />
hier können wir die Amplitude wieder vervielfachen oder den Zeitpunkt des Impulses<br />
verschieben sowie Linearkombinationen bilden; siehe Abbildung 10.<br />
1.2.3 Zusammenhang zwischen Sprung- und Impulsfunktion<br />
Wir denieren die Rampenfunktion<br />
⎧<br />
⎨ 0, t < 0,<br />
m a (t) := t/a, 0 ≤ t ≤ a,<br />
⎩<br />
1, t > a<br />
,
1 EINFÜHRUNG 10<br />
Abbildung 10: Diracfunktion und Modikationen<br />
wiederum für beliebiges a > 0; siehe Abbildung 11.<br />
Dann ist m a (t) für alle t ≠ 0 und t ≠ a dierenzierbar mit der Ableitung<br />
Abbildung 11: Rampenfunktion m a (t)<br />
m ′ a(t) :=<br />
{ 0, t < 0 und t > a,<br />
1/a, 0 ≤ t ≤ a.<br />
Indem wir das Verhalten an einzelnen Zeitpunkten ignorieren, können wir also kurz sagen<br />
m ′ a(t) = r a (t).<br />
Wir hatten ja oben schon gesehen, dass r a (t) → δ(t) für a → 0 + . Analog stellen wir fest,<br />
dass m a (t) → σ(t) für a → 0 + . Zusammen ergibt sich also - wiederum hier mathematisch<br />
nicht ganz korrekt ausgeführt -<br />
d<br />
σ(t) = δ(t) .<br />
dt<br />
Mit anderen Worten:
1 EINFÜHRUNG 11<br />
MERKE: Zusammenhang zwischen δ und σ<br />
1. Die DIRAC-Funktion kann als die Ableitung der HEAVISIDE-Funktion betrachtet<br />
werden.<br />
1.2.4 Einsetzregel und Ausblendeigenschaft der DIRAC-Funktion<br />
Satz 1 (Einsetzregel für δ)<br />
Sei f(t) stetig an der Stelle t 0 ∈ R. Dann gilt die Einsetzformel<br />
f(t) · δ(t − t 0 ) = f(t 0 ) · δ(t − t 0 ) .<br />
Als direkte Folgerung ergibt sich die Integralformel<br />
∫ ∞<br />
f(t) · δ(t − t 0 ) dt =<br />
∫ ∞<br />
f(t 0 ) · δ(t − t 0 ) dt = f(t 0 ) ·<br />
∫ ∞<br />
δ(t − t 0 ) dt = f(t 0 ),<br />
−∞<br />
−∞<br />
−∞<br />
die auch als Ausblendeigenschaft der DIRAC-Funktion bezeichnet wird.<br />
1.2.5 Verallgemeinerte Ableitungen<br />
Aufgrund der Beziehung d/dtσ(t) = δ(t) sind wir schon fast in der Lage, beliebige abschnittsweise<br />
denierte Funktionen zu dierenzieren. Da solche Funktionen aufgrund von<br />
Sprüngen und Knicken nicht im eigentlichen Sinne dierenzierbar sind, sprechen wir im<br />
Folgenden von der verallgemeinerten Ableitung.<br />
Nehmen wir an, wie möchten die abschnittweise denierte Funktion<br />
s(t) = (2 + t) · σ(t − 1)<br />
ableiten. Wir kennen zwar die (verallgemeinerten) Ableitungen jedes Faktors, doch was<br />
machen wir mit dem Produkt? Hier gilt zum Glück auch weiterhin die Produktregel:<br />
Satz 2 (Verallgemeinerte Produktregel)<br />
Bei Ableiten von Termen der Form f(t) · σ(t − t 0 ), wobei f dierenzierbar ist, gilt die<br />
verallgemeinerte Produktregel<br />
d<br />
dt [f(t) · σ(t − t 0)] = f ′ (t) · σ(t − t 0 ) + f(t 0 ) · δ(t − t 0 ) .<br />
Dabei würde man im letzten Term zwar den Vorfaktor f(t) erwarten. Diesen können wir<br />
aber gemäÿ Satz 1 sofort durch f(t 0 ) ersetzen.
2 DIE LAPLACE-TRANSFORMATION 12<br />
Damit können wir nun s ′ (t) berechnen:<br />
s ′ (t) = 1 · σ(t − 1) + (2 + t) · δ(t − 1) = σ(t − 1) + 3 · δ(t − 1) .<br />
(Hierbei haben wir die Einsetzregel mit t 0 = 1 angewendet.)<br />
Abbildung 12 zeigt s(t) und die verallgemeinerte Ableitung s ′ (t).<br />
Nach diesem Beispiel ist relativ klar wie man, ausgehend vom Schaubild einer abschnitts-<br />
Abbildung 12: s(t) und seine verallgemeinerte Ableitung s ′ (t)<br />
weise denierten Funktion, direkt deren verallgemeinerte Ableitung skizziert ohne diese<br />
zu berechnen:<br />
MERKE: Verallgemeinertes Ableiten grasch<br />
1. Dort, wo die Ausgangsfunktion dierenzierbar ist, leitet man ganz normal ab.<br />
2. Eine Sprungstelle t s der Höhe h s schlägt sich in der Ableitung in dem Term h s ·<br />
δ(t − t s ) nieder.<br />
Beispiel 2 Skizzieren Sie jeweils die gegebene Funktion und danach sofort (d.h. ohne<br />
Rechnung) deren verallgemeinerte Ableitung.<br />
Berechnen Sie dann die verallgemeinerte Ableitung mit Hilfe von Satz 2 und vergleichen<br />
Sie ihr Ergebnis mit dem zuvor angefertigten Schaubild.<br />
a) (1 + t) · (σ(t + 1) − σ(t)) + (1 − t) · (σ(t) − σ(t − 1))<br />
b) 2 − 2σ(t − 2) + (t − 3) 2 · (σ(t − 2) − σ(t − 4)) + σ(t − 4)<br />
2 Die LAPLACE-<strong>Transformation</strong><br />
Genau wie auch die FOURIER-<strong>Transformation</strong> handelt es sich bei der LAPLACE-<br />
<strong>Transformation</strong> um eine sogenannte Integraltransformation, da - wie wir gleich sehen
2 DIE LAPLACE-TRANSFORMATION 13<br />
werden - der Wechsel in die Spiegelwelt mathematisch durch eine Integralformel bewerkstelligt<br />
wird.<br />
Wie schon am Anfang erläutert werden wir die LAPLACE-<strong>Transformation</strong> für die Untersuchung<br />
physikalisch-technischer Systeme verwenden. Da wir diese immer erst ab einem<br />
bestimmten Zeitpunkt untersuchen, beschränken wir uns für die zeitlichen Verläufe ab<br />
einem t ≥ t 0 . Ohne Einschränkung können wir dabei t 0 = 0 annehmen.<br />
2.1 Denition und erste Beispiele<br />
2.1.1 Denition der <strong>Laplace</strong>-<strong>Transformation</strong><br />
Denition 2 (<strong>Laplace</strong>-<strong>Transformation</strong>)<br />
Sei f(t) eine beliebige, für t ≥ 0 denierte Funktion. Dann heiÿt die komplexwertige<br />
Funktion<br />
F (s) :=<br />
∫ ∞<br />
0<br />
f(t) e −st dt<br />
die <strong>Laplace</strong>-Transformierte zu/von f und zwar für all jene s ∈ C, für die das<br />
Integral existiert. Wir schreiben dann<br />
f(t) ◦ • F (s) oder F (s) = L{f(t)};<br />
lies: klein f von t transformiert zu groÿ F von s bzw. groÿ F von s ist die Transformierte<br />
von klein f von t.<br />
In der Denition tritt also ein uneigentliches Integral mit komplexwertigem Integranden<br />
auf.<br />
Wiederholung aus Mathe 1:<br />
∫ ∞<br />
0<br />
. . . dt = lim<br />
b→∞<br />
∫b<br />
0<br />
. . . dt.<br />
Aber wie ist ein Integral mit komplexwertigem Integranden zu verstehen? Ganz einfach:<br />
∫ b<br />
0<br />
f(t) e −st dt<br />
s=x+jy<br />
=<br />
=<br />
=<br />
∫ b<br />
0<br />
∫ b<br />
f(t) e −xt e −jyt dt<br />
f(t) e −xt · (cos (−yt) + j sin (−yt)) dt<br />
0<br />
∫ b<br />
∫ b<br />
f(t) e −xt cos (yt) dt − j · f(t) e −xt sin (yt) dt;<br />
0<br />
0
2 DIE LAPLACE-TRANSFORMATION 14<br />
also eine aus zwei herkömmlichen Integralen gebildete komplexe Zahl.<br />
Man sieht auch, dass der Faktor e −xt = e −Re(s)t für Re(s) > 0 für die Konvergenz des<br />
uneigentlichen Integrals sorgt (, falls nicht f(t) zu stark wächst für t → ∞).<br />
2.1.2 Die Rücktransformationsformel<br />
Satz 3 (<strong>Laplace</strong>-Rücktransformation)<br />
Sei f(t) ◦ • F (s) eine <strong>Laplace</strong>-<strong>Transformation</strong>. Dann gilt<br />
f(t) = 1<br />
2πj ·<br />
∫<br />
s=x+j∞<br />
s=x−j∞<br />
F (s) e st ds,<br />
wobei x beliebig gewählt werden kann, allerdings groÿ genug, so dass F (x + jy) für alle<br />
y ∈ R deniert ist.<br />
Für die Rückrichtung der <strong>Transformation</strong> schreiben wir F (s) • ◦ f(t).<br />
Die Schreibweise ist also nur die gespiegelte Version der in Denition 2 eingeführten<br />
Schreibweise.<br />
Die Integration verläuft entlang eines Integrationspfads in C, genauer entlang einer Geraden<br />
mit konstantem Realteil x, so dass F (s) für jedes s auf dieser Geraden deniert<br />
(sprich: das Integral aus Denition 2 konvergent) ist.<br />
Glücklicherweise brauchen wir an dieser Stelle nicht näher auf die Integration in C einzugehen;<br />
damit beschäftigt sich die mathematische Disziplin der Funktionentheorie. Stattdessen<br />
werden wir einige aus dem Reellen bekannte Rechenregeln übernehmen und damit<br />
ausreichend gut rechnen können. Zudem gibt es umfangreiche <strong>Transformation</strong>stabellen, in<br />
denen die wichtigsten <strong>Transformation</strong>spaare f(t)◦ •F (s) nachgeschlagen werden können.<br />
2.1.3 Beispiele<br />
Zur Übung wollen wir trotzdem einige einfache <strong>Transformation</strong>spaare manuell berechnen;<br />
nicht zuletzt, um das Rechnen mit komplexen Integralen zu üben bzw. um zu sehen, dass<br />
man dazu nur reell integrieren können muss.<br />
Beispiel 3 Man berechne die <strong>Laplace</strong>-Transformierten der folgenden Funktionen<br />
unter alleiniger Verwendung von Denition 2:<br />
a) f(t) = σ(t),<br />
b) f(t) = σ(t − a) , a > 0,<br />
c) f(t) = A · (σ(t − t 1 ) − σ(t − t 2 )) , 0 < t 1 < t 2 ; A ∈ R<br />
d) f(t) = σ(t) · cos (ωt),<br />
e) f(t) = e at , a ∈ C
3 WICHTIGE SÄTZE ZUR LAPLACE-TRANSFORMATION 15<br />
f) f(t) = σ(t) · t n , n ∈ N +<br />
3 Wichtige Sätze zur <strong>Laplace</strong>-<strong>Transformation</strong><br />
Die in diesem Abschnitt aufgeführten Sätze sollen uns befähigen, möglichst viele Funktionen<br />
aus dem Zeitbereich in den Frequenzbereich transformieren zu können. Das Muster ist<br />
dabei immer das selbe: Angenommen man kennt schon ein oder mehrere gültige <strong>Transformation</strong>spaare<br />
(z.B. aus einer Tabelle), wie kann man sich dann daraus neue gültige Paare<br />
basteln?<br />
Da die meisten Beweise relativ einfach sind, geben wir diese mit an; auch um damit<br />
die verschiedenen Schreibweisen im Zusammenhang mit der <strong>Laplace</strong>-<strong>Transformation</strong> zu<br />
üben.<br />
3.1 Linearität<br />
Satz 4 (Linearität)<br />
Aus den <strong>Transformation</strong>en f ◦ • F, g ◦ • G folgt af + bg ◦ • aF + bG für alle a, b ∈ R.<br />
Für b = 0 kann man das auch so lesen: Man darf die <strong>Transformation</strong> f ◦ • F auf beiden<br />
Seiten mit einer Zahl a durchmultiplizieren.<br />
Und für a = b = 1 steht dort, dass man die linken und rechten Seiten zweier gegebener<br />
<strong>Transformation</strong>en einfach addieren darf.<br />
Beweis: Grund für die Richtigkeit der Linearität der <strong>Laplace</strong>-<strong>Transformation</strong> ist die<br />
Linearität der Integration:<br />
∫ ∞<br />
(af(t) + bg(t)) e −st dt = a<br />
∫ ∞<br />
f(t)e −st dt + b<br />
∫ ∞<br />
g(t)e −st dt,<br />
0<br />
d.h. L{af + bg} = aL{f} + bL{g}.<br />
Beispiel 4<br />
0<br />
0<br />
<br />
a) e jωt ◦ • . . .<br />
e −jωt ◦ • . . .<br />
=⇒ cos (ωt) ◦ • . . . , sin (ωt) ◦ • . . .<br />
•<br />
1<br />
s 2 +3s+2 • ◦ . . .<br />
3.2 Dämpfung im t-Bereich, Verschiebung im s-Bereich<br />
Satz 5 (t-Dämpfung, s-Verschiebung)<br />
Aus der <strong>Transformation</strong> f ◦ • F folgt e at · f(t) ◦ • F (s − a) für alle a ∈ C.
3 WICHTIGE SÄTZE ZUR LAPLACE-TRANSFORMATION 16<br />
Beweis:<br />
∫ ∞<br />
∫ ∞<br />
F (s − a) = f(t)e −(s−a) dt = e at f(t)e −st dt = L{e at f(t)}<br />
Beispiel 5<br />
0<br />
0<br />
<br />
a) e at · σ(t) ◦ • . . .<br />
b) e −at sin (ωt)<br />
c)<br />
5s+1<br />
s 2 +2s+5 • ◦ . . .<br />
3.3 Verschiebung im t-Bereich, Dämpfung im s-Bereich<br />
Satz 6 (t-Verschiebung, s-Dämpfung)<br />
Aus der <strong>Transformation</strong> f ◦ • F folgt σ(t − a) · f(t − a) ◦ • e −as · F (s) für alle a ∈ C.<br />
Beweis:<br />
∫ ∞<br />
σ(t − a) f(t − a)e −st dt =<br />
∫ ∞<br />
f(t − a)e −st dt<br />
0<br />
a<br />
∫ ∞<br />
Subst.: ˜t = t − a = f(˜t)e −s(˜t+a) d˜t<br />
0<br />
∫ ∞<br />
= e −sa · f(˜t)e −s˜t d˜t = e −sa L{f}.<br />
Beispiel 6<br />
a) σ(t − a) ◦ • . . .<br />
b) 1−e−3s<br />
s+2<br />
• ◦ . . .<br />
0<br />
<br />
3.4 Ähnlichkeitssatz<br />
Satz 7 (Ähnlichkeitssatz)<br />
Aus der <strong>Transformation</strong> f ◦ • F folgt f(at) ◦ • 1/a · F (s/a) für alle a > 0.
3 WICHTIGE SÄTZE ZUR LAPLACE-TRANSFORMATION 17<br />
Ersetzt man a durch 1/b, so ergibt sich eine andere gebräuchliche Darstellung dieses Satzes:<br />
( t<br />
f ◦ • F =⇒ f ◦ • b · F (bs).<br />
b)<br />
Beweis:<br />
L{f(at)} =<br />
∫ ∞<br />
f(at)e −st dt<br />
Beispiel 7<br />
Subst.: ˜t = at =<br />
0<br />
∫ ∞<br />
0<br />
f(˜t)e − s ˜t d˜t<br />
a<br />
a = 1 ( s<br />
)<br />
a · F .<br />
a<br />
<br />
a) sin t ◦ • 1<br />
s 2 +1<br />
=⇒ sin (ωt) ◦ • . . .<br />
b) e t + te t ◦ • . . . =⇒ (1 + at)e at ◦ • . . .<br />
3.5 Dierentiation im t-Bereich<br />
Satz 8 (t-Dierentiation)<br />
Gegeben sei die <strong>Transformation</strong> f ◦ • F . Für Re(s) > 0 gelten dann ebenfalls die<br />
<strong>Transformation</strong>en<br />
f ′ (t) ◦ • s · F (s) − f(0)<br />
f ′′ (t) ◦ • s 2 · F (s) − s · f(0) − f ′ (0)<br />
.<br />
f (k) (t) ◦ • s · L{f (k−1) (t)} − f (k−1) (0).<br />
Expandiert man die letzte Zeile, so ergibt sich<br />
f (k) (t) ◦ • s k · F (s) − s k−1 · f(0) − s k−2 · f ′ (0) − . . . − s 1 · f (k−2) (0) − f (k−1) (0).<br />
Man überlegt sich, dass nur die Formel für f ′ (t) zu beweisen ist, denn f ′′ (t) ist die erste<br />
Ableitung von f ′ (t), d.h. alle anderen Formeln folgen dann durch wiederholte Anwendung<br />
der Formel für die erste Ableitung.<br />
Beweis: Für den Fall f ′ (t) resultiert der Beweis aus einer Anwendung der partiellen<br />
Integration:<br />
L{f ′ (t)} =<br />
∫ ∞<br />
f ′ (t)e −st dt<br />
0
3 WICHTIGE SÄTZE ZUR LAPLACE-TRANSFORMATION 18<br />
part. Int. mit u ′ = f ′ , v = e −st = [ f(t)e −st] ∞<br />
∫<br />
0 − ∞<br />
= 0 − f(0) + s ·<br />
0<br />
∫ ∞<br />
0<br />
f(t)(−s)e −st dt<br />
f(t)e −st dt.<br />
Dieser Satz ist wichtig für die <strong>Transformation</strong> von Dierentialgleichungen und Dierentialgleichungssystemen,<br />
da dort ja Ableitungen auftreten.<br />
Beispiel 8<br />
a) f(t) := sin (ωt) ◦ •<br />
ω<br />
s 2 +ω 2<br />
=⇒ f ′ (t) ◦ • . . . =⇒ cos (ωt) ◦ • . . .<br />
<br />
3.6 Dierentiation im s-Bereich<br />
Satz 9 (s-Dierentiation)<br />
Gegeben ist die <strong>Transformation</strong> f ◦ •F . Dann folgt die <strong>Transformation</strong> −t·f(t)◦ •F ′ (s).<br />
Beweis: Dierenziert man die <strong>Transformation</strong>sgleichung F (s) = ∫ ∞<br />
0<br />
f(t)e −st dt auf beiden<br />
Seiten nach s, so ergibt sich<br />
F ′ (s) = d ds<br />
∫ ∞<br />
f(t)e −st dt<br />
=<br />
0<br />
∫ ∞<br />
∫ ∞<br />
f(t) d ds e−st dt = −t · f(t)e −st dt<br />
0<br />
= L{−t · f(t)},<br />
0<br />
wobei wir nicht näher auf die (an dieser Stelle zulässige) Vertauschung von Dierentiation<br />
und Integration (von der ersten zur zweiten Zeile) eingehen.<br />
<br />
Beispiel 9<br />
a) f(t) = 1 ◦ • 1, d.h. 1 • ◦ 1<br />
s s<br />
=⇒ dn 1<br />
• ◦ . . .<br />
ds n s<br />
b) sin t ◦ • 1<br />
1+s 2<br />
=⇒ d 1<br />
ds<br />
1+s 2 • ◦ . . .
3 WICHTIGE SÄTZE ZUR LAPLACE-TRANSFORMATION 19<br />
3.7 Integration im t-Bereich<br />
Satz 10 (t-Integration)<br />
Gegeben sei wieder die <strong>Transformation</strong> f(t) ◦ • F (s). Dann folgt<br />
∫ t<br />
0<br />
f(u) du ◦ • F (s)<br />
s .<br />
Aus ∫ Mathematik 1 ist bekannt, dass das von seiner oberen Grenze t abhängige Integral<br />
t<br />
f(u) du nichts weiter als eine Stammfunktion von f(t) ist (, wenn f(t) stückweise stetig<br />
0<br />
ist). Unter all den Stammfunktionen von f(t) ist es darüber hinaus diejenige Stammfunktion,<br />
die an der Stelle t = 0 den Wert Null hat, d.h. deren Schaubild durch den Ursprung<br />
verläuft.<br />
Beweis: Sei also die durch den Ursprung verlaufende Stammfunktion von f(t) mit G(t)<br />
bezeichnet. Dann gilt<br />
part. Int.: f = u ′ , e−st<br />
s<br />
F (s)<br />
s<br />
=<br />
= v =<br />
∫ ∞<br />
0<br />
f(t) e−st<br />
s<br />
[G(t) · e−st<br />
= 0 − 0 +<br />
s<br />
∫ ∞<br />
dt<br />
] ∞<br />
t=0<br />
−<br />
∫ ∞<br />
0<br />
G(t)e −st dt,<br />
G(t) ( − −st) dt<br />
0<br />
wobei wir noch angenommen haben, dass lim t→∞ G(t)e −st<br />
Re(s) > 0 erfordert.<br />
= 0 ist, was auf jeden Fall<br />
<br />
Beispiel 10<br />
a) f(t) = 1 ◦ • 1 s<br />
=⇒ t ◦ • . . .<br />
b) 1 2 t sin t ◦ • s<br />
(s 2 +1) 2<br />
=⇒<br />
1<br />
(s 2 +1) 2 • ◦ 1 2<br />
∫ t<br />
0<br />
x sin x dx = . . .
4 DIE FALTUNG 20<br />
3.8 Anfangs- und Endwerte<br />
Satz 11 (Anfangs- und Endwerte)<br />
Aus der <strong>Transformation</strong> f(t)◦ •F (s) folgen nachstehende Formeln für f(0 + ) und f(∞):<br />
lim f(t) = lim<br />
t→0 +<br />
lim<br />
t→∞<br />
s · F (s)<br />
s→∞<br />
f(t) = lim s→0 +<br />
und<br />
Der Grenzübergang s → ∞ bedeutet dabei genauer Re(s) → ∞, d.h. es ist egal wie sich<br />
der Imaginärteil von s während des Grenzübergangs verhält.<br />
Achtung! Die zweiten Ausage gilt im Allgemeinen nur, wenn F (s) in der rechten Halbebene<br />
{s ∈ C | Re(s) ≥ 0} höchstens einen einfachen Pol an der Stelle s = 0 besitzt.<br />
Wir verzichten an dieser Stelle auf den Beweis des Satzes.<br />
Beispiel 11<br />
a) σ(t) ◦ • 1 und 1/s besitzt nur einen Pol erster Ordnung bei s = 0. Demnach gelten<br />
s<br />
beide Formeln, nämlich:<br />
. . .<br />
b) F (s) = s • ◦ t sin t = f(t)<br />
(s 2 +1) 2 2<br />
lim t→0 + f(t) = . . . ...<br />
lim t→∞ f(t) = . . . ???<br />
c) Wir suchen die Rücktransformation f(t) von 1 • ◦ f(t).<br />
F (s) = 1 hat keine Pole, d.h. beide Formeln gelten:<br />
=⇒ . . . =⇒ f(t) = δ(t)<br />
4 Die Faltung<br />
Wir haben nun zahlreiche Hilfsmittel beisammen, um aus gegebenen, z.B. tabellierten<br />
oder bereits berechneten <strong>Transformation</strong>spaaren weitere korrekte <strong>Transformation</strong>spaaare<br />
zu berechnen.<br />
Nun soll uns die Frage beschäftigen, wie wir aus den gegebenen Transformierten von f(t)<br />
und g(t) die Transformierte von f(t)·g(t) erzeugen können. Dies erönet uns dann weitere<br />
Rechenwege, um <strong>Transformation</strong>en zu bewerkstelligen.<br />
Zudem wird uns die Antwort auf diese Frage sehr weiterhelfen beim Verständnis der Ein-<br />
Ausgabe-Relation eines linearen Systems, das wir weiter unten behandeln.
4 DIE FALTUNG 21<br />
4.1 Denition und Eigenschaften<br />
4.1.1 Denition des Faltungsprodukts<br />
Denition 3 (Faltungsprodukt/Faltung)<br />
Seien f und g zwei reell-wertige, auf ganz R denierte Funktionen. Dann nennt man<br />
die für jedes x ∈ R durch das uneigentliche Integral<br />
f ∗ g (x) :=<br />
∫ ∞<br />
f(u) · g(x − u) du<br />
denierte Funktion Faltung oder Faltungsprodukt von f und g.<br />
−∞<br />
Das Ergebnis der Faltungsoperation ist also wieder eine auf ganz R denierte reell-wertige<br />
Funktion, deren jeder Funktionswert durch ein Integral berechnet werden muss.<br />
Die Denition ist natürlich nur dann sinnvoll, wenn das Integral auch für jeden x-Wert<br />
existiert, d.h. eine reelle Zahl ergibt.<br />
Beispiel 12 f(x) = σ(x) e x , g(x) = e 2x<br />
=⇒ f ∗ g (x) = . . ..<br />
4.1.2 Eigenschaften der Faltung<br />
Satz 12 (Faltungseigenschaften)<br />
Für die Funktionen f, g, h und c ∈ R gelten:<br />
(1) f ∗ g = g ∗ f (* ist kommutativ)<br />
(2) f ∗ (g + h) = f ∗ g + f ∗ h (* ist distributiv)<br />
(3) (f ∗ g) ∗ h = f ∗ (g ∗ h) (* ist assoziativ)<br />
(4) (cf) ∗ g = c(f ∗ g) = f ∗ (cg) (Skalare sind verschiebbar)<br />
(5) f ∗ δ = f (δ ist neutrales Element)<br />
Bis auf (3) und (4) sind das einfache Folgerung aus der Integralrechnung, z.B. die Kommutativität:<br />
∫ ∞<br />
f(u) · g(x − u) du ũ:=x−u<br />
=<br />
∫<br />
−∞<br />
f(x − ũ) · g(ũ) (−dũ) =<br />
∫ ∞<br />
g(ũ) · f(x − ũ) dũ.<br />
−∞<br />
∞<br />
−∞
4 DIE FALTUNG 22<br />
4.1.3 Faltung bei endlichen Träger<br />
Ist eine Funktion nur auf einem endlichen Intervall ungleich Null, so sagt man sie besitzt<br />
einen endlichen Träger; genauer:<br />
Denition 4 (Träger einer Funktion)<br />
Zu einer Funktion f(x), x ∈ R heiÿt die Menge<br />
Träger von f.<br />
f(t) = σ(t + 1) − σ(t − 2) besitzt den Träger [−1, 2]; also endlichen Trä-<br />
Beispiel 13<br />
ger.<br />
T f := {x ∈ D f | f(x) ≠ 0}<br />
Falls f und g beide endlichen Träger haben, so hat auch f ∗ g wieder endlichen Träger,<br />
denn mit T f = [a, b] und T g = [c, d] folgt:<br />
∫ ∞<br />
f(u) · g(x − u) du =<br />
∫ b<br />
f(u) · g(x − u) du = 0,<br />
−∞<br />
a<br />
falls x − b > d ist oder x − a < c. (Man mache sich klar, dass x − u ∈ [x − b, x − a].)<br />
Damit muss der Träger von f ∗ g enthalten sein in [a + c, b + d].<br />
4.2 Der Zusammenhang von Multiplikation und Faltung<br />
Satz 13 (Faltungssatz)<br />
Multiplikation im Zeitbereich ist Faltung im Frequenzbereich;<br />
Multiplikation im Frequenzbereich ist Faltung im Zeitbereich.<br />
D.h. aus f(t) ◦ • F (s) und g(t) ◦ • G(s) folgen die <strong>Transformation</strong>spaare<br />
Beispiel 14<br />
f(t) · g(t) ◦ • F (s) ∗ G(s), und f(t) ∗ g(t) ◦ • F (s) · G(s)<br />
a) f(t) = g(t) = σ(t) =⇒ F (s) = G(s) = 1 s<br />
−→ 1 s 2 ◦ • . . .<br />
b) H(s) =<br />
1<br />
s 2 +7s+6 = 1<br />
s+1 · 1<br />
s+6 • ◦ . . .
5 LÖSEN LINEARER DIFFERENTIALGLEICHUNGEN 23<br />
5 Lösen linearer Dierentialgleichungen mittels <strong>Laplace</strong>-<br />
<strong>Transformation</strong><br />
Wir betrachten (gewöhnliche) lineare Dierentialgleichungen höherer Ordnung mit konstanten<br />
Koezienten; genauer entsprechende Anfangswertprobleme mit Anfangsbedingungen<br />
zum Zeitpunkt t = 0.<br />
Für diese haben wir schon ein Lösungsverfahren kennengelernt. Es zeigt sich, dass diese<br />
Problemklasse auch sehr gut mit Hilfe der LAPLACE-<strong>Transformation</strong> gelöst werden<br />
kann.<br />
5.1 Allgemeines Lösungsschema<br />
Gegeben ist also ein Anfangswertproblem der Ordnung n ≥ 2 wie soeben beschrieben:<br />
a n · y (n) (t) + . . . a 1 · y ′ (t) + a 0 · y(t) = r(t),<br />
y(0) = c 0 , y ′ (0) = c 1 , . . . , y (n−1) (0) = c n−1 ,<br />
wobei die Koezienten a k und die Werte c k vorgegebene reelle Zahlen sind.<br />
METHODE: Lösungsschema für lin. DGLen<br />
1. <strong>Transformation</strong> des AWPs (siehe Satz 8)<br />
2. Auösen der resultierenden Gleichung nach Y (s)<br />
3. Rücktransformation = Lösung des AWPs<br />
Schauen wir uns dies einmal auf dem allgemeinen Level an:<br />
y(t) ◦ • Y (S) kurz: Y<br />
y ′ (t) ◦ • s · Y (s) − y(0) = s 1 · Y − c 0<br />
y ′′ (t) ◦ • s 2 · Y (s) − s 1 · y(0) − y ′ (0) = s 2 · Y − s · c 0 − c 1<br />
.<br />
y (n) (t) ◦ • s n · Y (s) − s n−1 · y(0) − . . . − y (n−1) (0) = s n · Y − s n−1 · c 0 − . . . − c n−1<br />
Wir multiplizieren die erste Zeile mit a 0 (da wir ja den Term a 0 · y(t) transformieren<br />
möchten), die zweite Zeile mit a 1 usw. Dies geht wegen der Linearität der <strong>Laplace</strong>-<br />
<strong>Transformation</strong> gut; siehe Satz 4.<br />
Danach addieren wir alles und erhalten links die linke Seite der DGL und rechts die<br />
zugehörige <strong>Laplace</strong>-Transformierte:<br />
(a n · s n + . . . a 1 · s 1 + a 0 ) · Y + Q n−1 (s),<br />
wobei Q n−1 das sich ergebende Polynom vom Grad s − 1 ist.<br />
Transformiert man nun auch noch die rechte Seite r(t)◦ •R(s), so ergibt sich die Gleichung<br />
(a n · s n + . . . a 1 · s 1 + a 0 ) · Y + Q n−1 (s) = R(s),
5 LÖSEN LINEARER DIFFERENTIALGLEICHUNGEN 24<br />
die wir nach Y auösen:<br />
Y (s) =<br />
R(s) − Q n−1 (s)<br />
a n · s n + . . . a 1 · s 1 + a 0<br />
.<br />
MERKE: Nenner von Y (s)<br />
1. Als Nenner der Transformierten von y(t) ergibt sich automatisch das charakteristische<br />
Polynom der DGL (an der Stelle s).<br />
Die rechte Seite ist dann noch zurückzutransformieren, um schlieÿlich die gesuchte Lösung<br />
des AWPs, y(t), zu erhalten.<br />
5.1.1 Beispiele<br />
Beispiel 15<br />
a) y ′′ − 5y ′ − 14y = 18e t , y(0) = −2, y ′ (0) = 19<br />
b) y ′′ + 2y ′ + 5y = e −t sin (2t)<br />
Gesucht ist diejenige Lösung, die mit Tangente y = x durch den Ursprung verläuft.<br />
5.2 Anfangswerte für t ≠ 0<br />
Wir wollen uns kurz davon überzeugen, dass die Annahme, dass alle Anfangswerte immer<br />
für den Zeitpuntk t = 0 gegeben sind, keine Einschränkung bedeutet.<br />
Nehmen wir dazu an, die Anfangswerte wären zu einem Zeitpunkt t = t 0 ≠ 0 gegeben.<br />
METHODE: Anfangswerte für t 0 ≠ 0 gegeben<br />
1. Lösen des AWPS als wäre t 0 = 0; dies liefert ein ỹ(t)<br />
2. y(t) := ỹ(t − t 0 ), d.h. in ỹ(t) einfach alle t konsequent durch t − t 0 ersetzen<br />
(Letztendlich verschieben wir also einfach den Zeitpunkt t 0 in den Ursprung des Zeitstrahls.)<br />
5.3 Spezielle Anregungssignale<br />
Wir betrachten wieder AWPs wie oben, d.h. mit t 0 = 0.Allerdings seien alle Anfangswerte<br />
gleich Null, d.h. das betrachtete System sei zum Zeitpunkt t = 0 in Ruhe.<br />
Mit Hilfe unserer Einheitsfunktionen σ(t) und δ(t) lassen sich stückweise stetige Anregungsimpulse<br />
mit endlichem Träger modellieren. Solche rechten Seiten von DGLen<br />
hatten wir bisher noch nicht betrachtet, können dies nun aber mit Leichtigkeit tun, da<br />
wir die Transformierten dieser rechten Seiten berechnen können.<br />
Beispiel 16
6 LÖSEN LINEARER DIFFERENTIALGLEICHUNGSSYSTEME 25<br />
a) y ′′ + 5y ′ + 6y = σ(t) , y(0) = y ′ (0) = 0<br />
b) y ′′ + 5y ′ + 6y = δ(t) , y(0) = y ′ (0) = 0<br />
{ 4t, t < 2<br />
c) y ′′ + 3y ′ + 2y =<br />
0, sonst , y(0) = y′ (0) = 0<br />
5.3.1 Zusammenhang der Lösungen für die Einheitsfunktionen<br />
Schauen wir uns noch einmal die Ergebnisse von Beispiel 16 an, speziell der a) und b)-<br />
Teile.<br />
Sei y σ (t) die Lösung des a)-Teils, d.h. desjenigen AWPs, bei dem als rechte Seite die<br />
HEAVISIDE-Funktion gewählt wurde. Analog sei y δ (t) die Lösung des Problems mit<br />
rechter Seite gleich DIRAC-Funktion. Dann rechnet man leicht nach, dass y σ (t) ′ = y δ (t)<br />
ist. Dies ist kein Zufall!<br />
MERKE: y ′ σ = y δ<br />
1. Leitet man die Lösung des AWPs mit rechter Seite = σ(t) ab, so erhält man die<br />
Lösung des AWPs mit rechter Seite = δ(t).<br />
Dies ist relativ leicht zu merken, wenn man bedenkt, dass auch σ(t) ′ = δ(t) gilt im Sinne<br />
des verallgemeinerten Ableitungsbegris.<br />
6 Lösen linearer Dierentialgleichungssysteme mittels<br />
<strong>Laplace</strong>-<strong>Transformation</strong><br />
Ganz analog zur <strong>Transformation</strong> einer einzelnen Dierentialgleichung können natürlich<br />
auch mehrere Dierentialgleichungen transformiert werden.<br />
6.1 Vorgehensweise<br />
Gesucht sind also m > 0 Funktionen in einer Variablen, z.B. der Zeit; x 1 (t), x 2 (t), . . . , x m (t).<br />
Wir wollen hier annehmen, dass auch genau m lineare Dierentialgleichungen mit konstanten<br />
Koezienten in den gesuchten Funktionen gegeben sind. Dabei dürfen allerdings<br />
in jeder Gleichung auch alle gesuchten Funktionen auftreten!<br />
Zusätzlich benötigen wir für eine eindeutige Lösung des Problems noch hinreichend viele<br />
Anfangsbedingungen. Genauer benötigen wir für x k (t) Anfangsbedingungen der Art<br />
x k (0), x ′ k (0), . . . , x(n−1)<br />
k<br />
(0), falls die höchste auftretende Ableitung von x k die n-te ist.<br />
Wir transformieren nun jede Gleichung wie gehabt und werden im s-Bereich ein lineares<br />
Gleichungssystem erhalten. Dieses wird dann im s-Bereich gelöst. Danach werden alle<br />
Ergebnisse aus dem s-Bereich in den Zeitbereich zurücktransformiert. Dies ergibt dann<br />
die gesuchten Funktionen x 1 (t), x 2 (t), . . . , x m (t).
6 LÖSEN LINEARER DIFFERENTIALGLEICHUNGSSYSTEME 26<br />
METHODE: Lösen eines DGL-Systems<br />
1. Alle Gleichungen inkl. der Anfangsbedingungen transformieren.<br />
2. Entstehendes lineares Gleichungssysytem im s-Bereich lösen.<br />
3. Lösungen des Gleichungssysytems in den t-Bereich zurücktransformieren.<br />
6.1.1 Lösung des Doppelpendelsystems<br />
Zur Illustration der Vorgehensweise kehren wir zurück zum Beispiel des Doppelpendels<br />
aus Abschnitt 1.1.3.<br />
Wir hatten dort ein lineares Dierentialgleichungssystem mit zwei Gleichungen erhalten:<br />
m · l· α ..<br />
= −ν · l· α .<br />
−m · g · α − k · l · (α − β),<br />
m · l· β ..<br />
= −ν · l· β .<br />
−m · g · β − k · l · (β − α).<br />
(Es handelt sich dabei übrigens um ein Dierentialgleichungssystem zweiter Ordnung, da<br />
die höchste aller überhaupt auftretenden Ableitung die zweite ist.)<br />
Um das Beispiel zu vereinfachen, teilen wir beide Gleichungen durch (m · l):<br />
..<br />
α = −<br />
m· ν α .<br />
− g l · α − k m · α + k m · β,<br />
..<br />
β = − ν m· .<br />
β − g l · β − k m · β + k m · α<br />
und verwenden die konkreten Werte ν/m = 2, g/l = 10 und k/m = 8. Nach den Umbenennungen<br />
x := α, y := β ergibt sich dann das folgende DGL-System, zu dem wir noch<br />
die angegebenen (und vollkommen frei gewählten) Anfangsbedingungen hinzufügen:<br />
..<br />
x = −2 ẋ −18 x + 8 y,<br />
..<br />
y = −2 ẏ −18 y + 8 x,<br />
AW: x(0) = 0,<br />
.<br />
x (0) = 1, y(0) = 0,<br />
.<br />
y (0) = 0.<br />
(Die Anfangsbedingungen bedeuten, dass sich beide Pendel am Tiefpunkt benden. Eines<br />
von beiden besitzt aber eine von Null verschiedene Anfangsgeschwindigkeit.)<br />
1. Schritt: <strong>Transformation</strong><br />
x(t) ◦ • X(s)<br />
.<br />
x (t) ◦ • s · X(s) − x(0)<br />
..<br />
x (t) ◦ • s 2 · X(s) − s · x(0)− ẋ (0)<br />
y(t) ◦ • Y (s)<br />
.<br />
y (t) ◦ • s · Y (s) − y(0)<br />
..<br />
y (t) ◦ • s 2 · Y (s) − s · y(0)− ẏ (0)
6 LÖSEN LINEARER DIFFERENTIALGLEICHUNGSSYSTEME 27<br />
Nach Einsetzen den Anfangswerte erhalten wir also das lineare Gleichungssystem<br />
s 2 X − 1 = −2sX − 18X + 8Y,<br />
s 2 Y = −2sY − 18Y + 8X bzw.<br />
X(s 2 + 2s + 18) − 8Y = 1<br />
Y (s 2 + 2s + 18) − 8X = 0.<br />
2. Schritt: Lösen des Gleichungssystems Man beachte, dass X und Y gesucht sind<br />
und s wie ein Parameter zu behandeln ist. Um die Übersicht zu behalten, empehlt es<br />
sich, das lineare Gleichungssystem in Matrixschreibweise zu schreiben:<br />
( s 2 + 2s + 18 −8<br />
−8 s 2 + 2s + 18<br />
) ( X<br />
·<br />
Y<br />
) ( 1<br />
=<br />
0<br />
Das hat auch den Vorteil, dass wir jetzt die Unbekannten mittels der CRAMERschen<br />
Regel bestimmen können:<br />
∣ 1 −8<br />
0 s 2 + 2s + 18 ∣<br />
s<br />
X =<br />
2 + 2s + 18<br />
∣ s2 + 2s + 18 −8<br />
=<br />
(s 2 + 2s + 18) 2 − 64 ,<br />
−8 s 2 + 2s + 18 ∣<br />
∣ s2 + 2s + 18 1<br />
−8 0 ∣<br />
8<br />
Y =<br />
∣ s2 + 2s + 18 −8<br />
=<br />
(s 2 + 2s + 18) 2 − 64 .<br />
−8 s 2 + 2s + 18 ∣<br />
. . .<br />
3. Schritt: Rücktransformation der Lösungen<br />
. . .<br />
6.1.2 Weiteres Übungsbeispiel<br />
Beispiel 17<br />
mit den Anfangsbedingungen<br />
Lösen Sie das lineare Dierentialgleichungssystem<br />
mittels LAPLACE-<strong>Transformation</strong>.<br />
.<br />
x (t) − x(t) + y(t) = − cos t,<br />
.<br />
y (t) − 4x(t) − y(t) = sin t + cos t<br />
x(0) = 1, y(0) = −1.<br />
)<br />
.
7 DIE EIN-AUSGABE-RELATION EINES LINEAREN SYSTEMS 28<br />
7 Die Ein-Ausgabe-Relation eines linearen Systems<br />
7.1 Problemstellung<br />
Die wohl interessantestes Anwendung der LAPLACE-<strong>Transformation</strong> ist die Untersuchung<br />
der Ein-Ausgabe-Relation eines linearen Systems.<br />
Als lineares System bezeichnen wir dabei eine wie in Abbildung 13 dargestellte black box,<br />
die folgende Eigenschaften hat:<br />
• Verstärkung: Ersetzt man den Input-Signal x(t) durch λ · x(t) (mit λ ∈ R), so<br />
ergibt sich als Output-Signal λ · y(t).<br />
• Überlagerung: Werden x 1 (t) und x 2 (t) in y 1 (t) bzw. y 2 (t) übersetzt, so wird<br />
x 1 (t) + x 2 (t) in y 1 (t) + y 2 (t) übersetzt.<br />
Abbildung 13: Lineares System mit Ein- und Ausgangssignal<br />
Die Frage ist nun, wie x(t) und y(t) miteinander zusammenhängen. Wie sich herausstellen<br />
wird, hat man diesen Zusammenhang interessanterweise vollständig verstanden, sobald<br />
man die Antwort des Systems auf den DIRAC-Impuls kennt. Wir führen also folgende<br />
Begrie ein:<br />
Denition 5 (Impuls- und Sprungantwort)<br />
Für x(t) = δ(t) nennt man die zugehörige Antwort eines gegebenen linearen System<br />
die Impulsantwort; y δ (t).<br />
Analog bezeichnet y σ (t) die Sprungantwort, d.h. die Antwort auf den Input x(t) = σ(t).<br />
Um dies zu erarbeiten machen wir einige...<br />
7.2 Allgemeine Betrachtungen<br />
Da unser Eingangssignal x(t) die Rolle der Störfunktion, d.h. der rechten Seite spielt,<br />
ergibt sich eine Dierentialgleichung der Form<br />
a n · y (n) (t) + . . . a 2 · y ′′ (t) + a 1 · y ′ (t) + a 0 · y(t) = x(t),<br />
wobei wir also annehmen wollen, dass die Koezienten a k konstant sind und nicht von t<br />
abhängen.
7 DIE EIN-AUSGABE-RELATION EINES LINEAREN SYSTEMS 29<br />
Als <strong>Transformation</strong>spaare erhalten wir:<br />
x(t) ◦ • X(s) sowie<br />
y(t) ◦ • Y (s)<br />
y ′ (t) ◦ • s · Y (s) − y(0)<br />
y ′′ (t) ◦ • s 2 · Y (s) − s · y(0) − y ′ (0)<br />
.<br />
Unter der Annahme, dass das System zum Zeitpunkt t = 0 in Ruhe ist, sind alle Anfangsbedingungen<br />
gleich Null, fallen also weg.<br />
Wir multiplizieren die <strong>Transformation</strong>en mit den passenden Koezienten a k und bekommen<br />
im s-Bereich die Gleichung<br />
Y (s) · [a<br />
n s n + · · · + a 2 s 2 + a 1 s + a 0<br />
]<br />
= X(s) bzw.<br />
Y (s)<br />
X(s)<br />
=<br />
1<br />
a n s n + · · · + a 2 s 2 + a 1 s + a 0<br />
.<br />
Interessanterweise hängt der Quotient Y (s)/X(s) also gar nicht vom Eingangs- oder Ausgangssignal<br />
ab. Diese kürzen sich im s-Bereich quasi weg. Übrig bleibt ein Term (auf der<br />
rechten Seite), der nur von den Koezienten aus der Dierentialgleichung abhängt. Genauer<br />
steht im Nenner das charakteristische Polynom, p char (s), der Dierentialgleichung.<br />
Dies gibt Anlass zu folgender Denition:<br />
Denition 6 (Übertragungsfunktion)<br />
Gegeben sei ein lineares System, dessen Verhalten sich durch eine lineare Dierentialgleichung<br />
mit konstanten Koezienten beschreiben lässt.<br />
Sei x(t) ein Eingangs- und y(t) das zugehörige Ausgangssignal mit den LAPLACE-<br />
Tranformierten X(s) bzw. Y (s). Dann heiÿt<br />
G(s) :=<br />
1<br />
p char (s)<br />
Übertragungsfunktion im s-Bereich oder auch Frequenzgang des Systems.<br />
Die Rücktransformierte g(t) ◦ • G(s) heiÿt Übertragungsfunktion im t-Bereich oder<br />
auch Transferfunktion des Systems.<br />
Wie G(s) ist natürlich auch g(t) unabhängig vom Eingangs- oder Ausgangssignal.<br />
Nach dem Faltungssatz, Satz 13, gilt<br />
y(t) ◦ • Y (s) = X(s) · G(s) • ◦ x ∗ g (t) .
7 DIE EIN-AUSGABE-RELATION EINES LINEAREN SYSTEMS 30<br />
Satz 14 (Berechnung des Ausgangssignals)<br />
Ist g(t) die Tranferfunktion eines linearen Systems, so berechnet sich das zum Eingangssignal<br />
x(t) gehörende Ausgangssignal y(t) gemäÿ der Formel<br />
y(t) = x ∗ g (t) .<br />
Wir hatten einerseits gesehen, dass wir die Tranferfunktion g(t) als Rücktransformierte<br />
von G(s) = 1/p char (s) berechnen können. Andererseits gilt aber wegen δ(t) ◦ • 1 auch<br />
y δ ◦ • Y δ (s) = 1 · G(s) = G(s) • ◦ g(t), bzw. kurz:<br />
Satz 15 (Tranferfunktion = Impulsantwort)<br />
Für ein lineares System gilt g(t) = y δ (t).<br />
Die Tranferfunktion stimmt also mit der Impulsantwort überein. Man könnte also sagen,<br />
dass man alles über das System herausbekommt, indem man sich die Antwort auf den<br />
Einheitsimpuls besorgt.<br />
Man kommt aber auch von der Sprungantwort auf die Transferfunktion, da ja y ′ σ(t) = y δ (t)<br />
gilt. D.h. man kann auch einfach die Sprungantwort berechnen und diese dann dierenzieren.<br />
Wir schauen uns der Vollständigkeit halber noch die Transformierte der Sprungantwort<br />
an. Wegen σ(t) ◦ • 1/s ist das einfach; und zwar<br />
y σ (t) ◦ • Y σ (s) = 1 s<br />
· G(s) =<br />
G(s)<br />
s<br />
=<br />
1<br />
s · p char (s) .<br />
Abbildung 14 fasst noch einmal die wichtigsten Erkenntnisse aus den zurückliegenden<br />
Sätzen und Betrachtungen zusammen.<br />
7.3 Beispiele<br />
7.3.1 Das R − c − Glied<br />
Wir kehren noch einmal zum R − c − Glied aus Abbildung 4 zurück. Dabei betrachten<br />
wir nun u in als Eingangssignal x(t) und u out als gesuchtes Ausgangssignal y(t).<br />
Das OHMsche Gesetz liefert:<br />
R = u R<br />
i(t) = u in − u out<br />
i(t)<br />
=<br />
x(t) − y(t)<br />
,<br />
i(t)<br />
d.h. x(t) − y(t) = R · i(t). Der Strom i(t) ist proportional zur zeitlichen Änderung der<br />
Spannung über dem Kondensator, d.h.<br />
i(t) = c · d<br />
dt u c(t) = c· ẏ (t),
7 DIE EIN-AUSGABE-RELATION EINES LINEAREN SYSTEMS 31<br />
Abbildung 14: Transfer- und Übertragungsfunktion und weitere wichtige Formeln<br />
wobei der Proportionalitätsfaktor c der Kapazität entspricht.<br />
Insgesamt folgt also die lineare Dierentialgleichung erster Ordnung<br />
Rc· ẏ (t) + y(t) = x(t),<br />
mit konstanten Koezienten. Wir können also unsere entwickelte Maschinerie auf das<br />
Problem anwenden.<br />
Beispiel 18 Man berechne für das R − c − Glied die Impulsantwort, die Sprungantwort<br />
sowie mittels Faltung die Antwort auf das Rechtecksignal x r (t) := u 0 · (σ(t − t 1 ) −<br />
σ(t − t 2 )), wobei u 0 > 0 und 0 ≤ t 1 < t 2 seien.<br />
. . .