

Bereitstellung von Umgebungsinformationen und Positionsdaten für ...
Bereitstellung von Umgebungsinformationen und Positionsdaten für ...
Bereitstellung von Umgebungsinformationen und Positionsdaten für ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
124 5. Globale Verbreitung <strong>und</strong> nahtlose Positionsbestimmung<br />
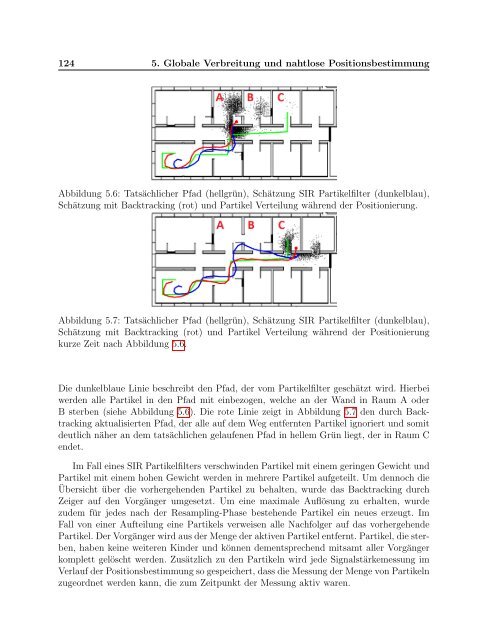
Abbildung 5.6: Tatsächlicher Pfad (hellgrün), Schätzung SIR Partikelfilter (dunkelblau),<br />
Schätzung mit Backtracking (rot) <strong>und</strong> Partikel Verteilung während der Positionierung.<br />
Abbildung 5.7: Tatsächlicher Pfad (hellgrün), Schätzung SIR Partikelfilter (dunkelblau),<br />
Schätzung mit Backtracking (rot) <strong>und</strong> Partikel Verteilung während der Positionierung<br />
kurze Zeit nach Abbildung 5.6.<br />
Die dunkelblaue Linie beschreibt den Pfad, der vom Partikelfilter geschätzt wird. Hierbei<br />
werden alle Partikel in den Pfad mit einbezogen, welche an der Wand in Raum A oder<br />
B sterben (siehe Abbildung 5.6). Die rote Linie zeigt in Abbildung 5.7 den durch Backtracking<br />
aktualisierten Pfad, der alle auf dem Weg entfernten Partikel ignoriert <strong>und</strong> somit<br />
deutlich näher an dem tatsächlichen gelaufenen Pfad in hellem Grün liegt, der in Raum C<br />
endet.<br />
Im Fall eines SIR Partikelfilters verschwinden Partikel mit einem geringen Gewicht <strong>und</strong><br />
Partikel mit einem hohen Gewicht werden in mehrere Partikel aufgeteilt. Um dennoch die<br />
Übersicht über die vorhergehenden Partikel zu behalten, wurde das Backtracking durch<br />
Zeiger auf den Vorgänger umgesetzt. Um eine maximale Auflösung zu erhalten, wurde<br />
zudem <strong>für</strong> jedes nach der Resampling-Phase bestehende Partikel ein neues erzeugt. Im<br />
Fall <strong>von</strong> einer Aufteilung eine Partikels verweisen alle Nachfolger auf das vorhergehende<br />
Partikel. Der Vorgänger wird aus der Menge der aktiven Partikel entfernt. Partikel, die sterben,<br />
haben keine weiteren Kinder <strong>und</strong> können dementsprechend mitsamt aller Vorgänger<br />
komplett gelöscht werden. Zusätzlich zu den Partikeln wird jede Signalstärkemessung im<br />
Verlauf der Positionsbestimmung so gespeichert, dass die Messung der Menge <strong>von</strong> Partikeln<br />
zugeordnet werden kann, die zum Zeitpunkt der Messung aktiv waren.





