

zu Kap. III.1.2 e) Ortskurven Vorlesung ... - uni-stuttgart
zu Kap. III.1.2 e) Ortskurven Vorlesung ... - uni-stuttgart
zu Kap. III.1.2 e) Ortskurven Vorlesung ... - uni-stuttgart

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
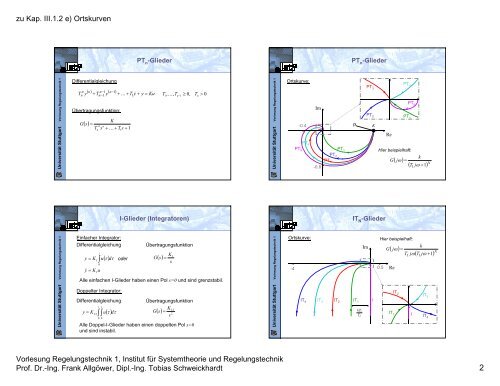
<strong>zu</strong> <strong>Kap</strong>. <strong>III.1.2</strong> e) <strong>Ortskurven</strong><br />
PT n<br />
-Glieder<br />
PT n<br />
-Glieder<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Differentialgleichung<br />
n ( n) n−1<br />
T y T y<br />
( n−1)<br />
n + n−<br />
1 + K+<br />
T 1 y&<br />
+ y = Ku<br />
Übertragungsfunktion:<br />
G<br />
() s<br />
=<br />
T<br />
n<br />
n<br />
K<br />
n<br />
s + K+<br />
T1 s +1<br />
T1 , K,<br />
T n −1<br />
≥ 0, Tn<br />
> 0<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
4<br />
PT 1<br />
Ortskurve:<br />
PT 3<br />
Im<br />
PT 2<br />
-0.4 P K<br />
PT<br />
PT 5<br />
PT 2<br />
PT 3<br />
-0.8<br />
PT 4<br />
PT 5<br />
PT 1<br />
Re<br />
Hier beispielhaft:<br />
k<br />
G( jω<br />
) =<br />
1 +1<br />
( T jω<br />
) N<br />
I-Glieder (Integratoren)<br />
IT N<br />
-Glieder<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Einfacher Integrator:<br />
Differentialgleichung<br />
y = K<br />
I ∫ u<br />
y&<br />
= K u<br />
I<br />
t<br />
0<br />
( τ )<br />
dτ<br />
oder<br />
Übertragungsfunktion<br />
G<br />
() s<br />
KI<br />
=<br />
s<br />
Alle einfachen I-Glieder haben einen Pol s=0 und sind grenzstabil.<br />
Doppelter Integrator:<br />
Differentialgleichung<br />
y = K<br />
t t<br />
I 2∫∫u( τ ) dτ<br />
0 0<br />
Übertragungsfunktion<br />
K<br />
I 2<br />
G() s =<br />
2<br />
s<br />
Alle Doppel-I-Glieder haben einen doppelten Pol s=0<br />
und sind instabil.<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Ortskurve:<br />
Re<br />
IT 3<br />
IT 2<br />
IT 1<br />
-4 0.5<br />
IT 4<br />
I<br />
IT 2<br />
kT 1<br />
T I<br />
Im<br />
Hier beispielhaft:<br />
k<br />
G( jω<br />
) =<br />
TI<br />
jω<br />
1 +1<br />
IT 1<br />
I<br />
( T jω<br />
) N<br />
IT 3<br />
IT 4<br />
<strong>Vorlesung</strong> Regelungstechnik 1, Institut für Systemtheorie und Regelungstechnik<br />
Prof. Dr.-Ing. Frank Allgöwer, Dipl.-Ing. Tobias Schweickhardt 2












