

zu Kap. III.1.2 e) Ortskurven Vorlesung ... - uni-stuttgart
zu Kap. III.1.2 e) Ortskurven Vorlesung ... - uni-stuttgart
zu Kap. III.1.2 e) Ortskurven Vorlesung ... - uni-stuttgart

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
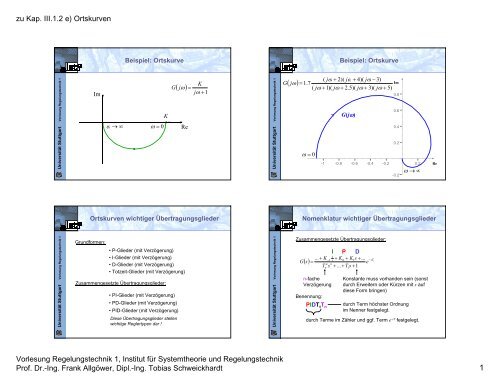
<strong>zu</strong> <strong>Kap</strong>. <strong>III.1.2</strong> e) <strong>Ortskurven</strong><br />
Beispiel: Ortskurve<br />
Beispiel: Ortskurve<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Im<br />
ω → ∞<br />
ω = 0<br />
K<br />
G<br />
( jω)<br />
Re<br />
= K<br />
j ω +1<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
G<br />
( jω)<br />
( jω<br />
+ 2)( jω<br />
+ 4)( jω<br />
− 3)<br />
= 1.7<br />
( jω<br />
+ 1)( jω<br />
+ 2.5)( jω<br />
+ 3)( jω<br />
+ 5)<br />
ω = 0<br />
G(jω)<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
-1 -0.8 -0.6 -0.4 -0.2 0.2<br />
Im<br />
-0.2<br />
ω → ∞<br />
Re<br />
<strong>Ortskurven</strong> wichtiger Übertragungsglieder<br />
Nomenklatur wichtiger Übertragungsglieder<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Grundformen:<br />
• P-Glieder (mit Verzögerung)<br />
• I-Glieder (mit Verzögerung)<br />
• D-Glieder (mit Verzögerung)<br />
• Totzeit-Glieder (mit Verzögerung)<br />
Zusammengesetzte Übertragungsglieder:<br />
• PI-Glieder (mit Verzögerung)<br />
• PD-Glieder (mit Verzögerung)<br />
• PID-Glieder (mit Verzögerung)<br />
Diese Übertragungsglieder stellen<br />
wichtige Reglertypen dar !<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Zusammengesetzte Übertragungsglieder:<br />
I P D<br />
1<br />
... + K−<br />
1 s<br />
+ K0<br />
+ K1s<br />
+ ... −sTt<br />
G() s =<br />
e<br />
n n<br />
T s + ... + T s + 1<br />
n-fache<br />
Verzögerung<br />
Benennung:<br />
PIDT t T n<br />
n<br />
1<br />
Konstante muss vorhanden sein (sonst<br />
durch Erweitern oder Kürzen mit s auf<br />
diese Form bringen)<br />
durch Term höchster Ordnung<br />
im Nenner festgelegt.<br />
durch Terme im Zähler und ggf. Term e -sT festgelegt.<br />
<strong>Vorlesung</strong> Regelungstechnik 1, Institut für Systemtheorie und Regelungstechnik<br />
Prof. Dr.-Ing. Frank Allgöwer, Dipl.-Ing. Tobias Schweickhardt 1
<strong>zu</strong> <strong>Kap</strong>. <strong>III.1.2</strong> e) <strong>Ortskurven</strong><br />
PT n<br />
-Glieder<br />
PT n<br />
-Glieder<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Differentialgleichung<br />
n ( n) n−1<br />
T y T y<br />
( n−1)<br />
n + n−<br />
1 + K+<br />
T 1 y&<br />
+ y = Ku<br />
Übertragungsfunktion:<br />
G<br />
() s<br />
=<br />
T<br />
n<br />
n<br />
K<br />
n<br />
s + K+<br />
T1 s +1<br />
T1 , K,<br />
T n −1<br />
≥ 0, Tn<br />
> 0<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
4<br />
PT 1<br />
Ortskurve:<br />
PT 3<br />
Im<br />
PT 2<br />
-0.4 P K<br />
PT<br />
PT 5<br />
PT 2<br />
PT 3<br />
-0.8<br />
PT 4<br />
PT 5<br />
PT 1<br />
Re<br />
Hier beispielhaft:<br />
k<br />
G( jω<br />
) =<br />
1 +1<br />
( T jω<br />
) N<br />
I-Glieder (Integratoren)<br />
IT N<br />
-Glieder<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Einfacher Integrator:<br />
Differentialgleichung<br />
y = K<br />
I ∫ u<br />
y&<br />
= K u<br />
I<br />
t<br />
0<br />
( τ )<br />
dτ<br />
oder<br />
Übertragungsfunktion<br />
G<br />
() s<br />
KI<br />
=<br />
s<br />
Alle einfachen I-Glieder haben einen Pol s=0 und sind grenzstabil.<br />
Doppelter Integrator:<br />
Differentialgleichung<br />
y = K<br />
t t<br />
I 2∫∫u( τ ) dτ<br />
0 0<br />
Übertragungsfunktion<br />
K<br />
I 2<br />
G() s =<br />
2<br />
s<br />
Alle Doppel-I-Glieder haben einen doppelten Pol s=0<br />
und sind instabil.<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Ortskurve:<br />
Re<br />
IT 3<br />
IT 2<br />
IT 1<br />
-4 0.5<br />
IT 4<br />
I<br />
IT 2<br />
kT 1<br />
T I<br />
Im<br />
Hier beispielhaft:<br />
k<br />
G( jω<br />
) =<br />
TI<br />
jω<br />
1 +1<br />
IT 1<br />
I<br />
( T jω<br />
) N<br />
IT 3<br />
IT 4<br />
<strong>Vorlesung</strong> Regelungstechnik 1, Institut für Systemtheorie und Regelungstechnik<br />
Prof. Dr.-Ing. Frank Allgöwer, Dipl.-Ing. Tobias Schweickhardt 2
<strong>zu</strong> <strong>Kap</strong>. <strong>III.1.2</strong> e) <strong>Ortskurven</strong><br />
D-Glieder (Differenzierer)<br />
DT N<br />
-Glieder<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Ideales D-Glied:<br />
Differentialgleichung<br />
Übertragungsfunktion<br />
y = K u<br />
G( s) = K s<br />
D-Glieder ohne Verzögerung sind nicht kausal. D-Glieder kommen<br />
in der Realität nur mit Verzögerung vor (DT 1 ,...,DT N ).<br />
DT 1 –Glied:<br />
Differentialgleichung<br />
Übertragungsfunktion<br />
Serienschaltung eines D- und eines PT 1 -Gliedes.<br />
D &<br />
D<br />
T y & + y = K u<br />
1<br />
G<br />
() s<br />
D &<br />
K s<br />
= T s 1<br />
D<br />
1 1<br />
+<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Ortskurve:<br />
DT 1<br />
DT 4<br />
D<br />
DT 3<br />
DT 2<br />
Hier beispielhaft:<br />
jω<br />
G(<br />
jω)<br />
=<br />
ω<br />
( j + 1) N<br />
Im<br />
0.4<br />
D<br />
DT 1<br />
DT 2<br />
DT 3<br />
DT 4<br />
1<br />
Re<br />
Ideales Totzeitglied<br />
Totzeitglieder mit Verzögerung<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Gleichung<br />
y<br />
() t = k ⋅u( t − )<br />
T t<br />
Übertragungsfunktion<br />
G<br />
−T s<br />
() s = Ke t<br />
Ortskurve:<br />
Im<br />
0 1<br />
Re<br />
-1<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Totzeitglied mit Verzögerung erster Ordnung (T t T 1 –Glied)<br />
Differentialgleichung<br />
T y&<br />
+ y = k ⋅u<br />
1<br />
Übertragungsfunktion<br />
G<br />
K<br />
T s + 1<br />
( t − )<br />
T t<br />
−T s<br />
() s = e t<br />
1 1<br />
Ortskurve<br />
Im<br />
0.2<br />
0.5 1<br />
0 Re<br />
<strong>Vorlesung</strong> Regelungstechnik 1, Institut für Systemtheorie und Regelungstechnik<br />
Prof. Dr.-Ing. Frank Allgöwer, Dipl.-Ing. Tobias Schweickhardt 3
<strong>zu</strong> <strong>Kap</strong>. <strong>III.1.2</strong> e) <strong>Ortskurven</strong><br />
PI-Glieder<br />
E<br />
PI-Glieder<br />
E<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Differentialgleichung<br />
t ⎛ t<br />
2<br />
1<br />
T2<br />
&& y + T1<br />
y&<br />
+ y = Ku + KI<br />
∫ u<br />
⎜ ∫<br />
⎝<br />
T<br />
0<br />
I 0<br />
Übertragungsfunktion<br />
G<br />
2 (3)<br />
T2 y + T1<br />
&& y + y&<br />
= Ku&<br />
+ KIu<br />
= K u&<br />
+<br />
() s<br />
⎛ KI<br />
⎞<br />
= ⎜ K + ⎟<br />
⎝ s ⎠ 2<br />
K T s + 1<br />
=<br />
TI<br />
s 2 1<br />
1<br />
2 2<br />
( T s + T s + 1)<br />
I<br />
2 2<br />
( T s + T s + 1)<br />
1<br />
( τ ) dτ<br />
= K⎜u<br />
+ u( τ )<br />
(<br />
1 u)<br />
T I<br />
⎞<br />
dτ<br />
⎟<br />
⎟<br />
⎠<br />
T<br />
1, T2<br />
≥<br />
K<br />
I K I<br />
T =<br />
0<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Ortskurve:<br />
Ideales PI-Glied<br />
G<br />
⎛ +<br />
( jω) = k<br />
⎜1<br />
⎟ ⎝ jωT<br />
I ⎠<br />
PI-Glieder mit Verzögerung<br />
Hier beispielhaft:<br />
1<br />
1+<br />
jωT<br />
( )<br />
I<br />
G jω<br />
= k<br />
N<br />
(1 + jωT1<br />
)<br />
1<br />
⎞<br />
Im<br />
PIT 2<br />
PIT 1<br />
kT 1<br />
T I<br />
k<br />
PI<br />
Re<br />
PD-Glieder<br />
E<br />
PD-Glieder<br />
E<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Differentialgleichung:<br />
2<br />
T2<br />
&& y + T1<br />
y&<br />
+ y = Ku + KDu&<br />
T1, T2<br />
≥ 0<br />
= K<br />
Übertragungsfunktion:<br />
G<br />
() s<br />
TDs<br />
+ 1<br />
= K<br />
2 2<br />
T2 s + T1<br />
s + 1<br />
KD<br />
( u + TDu&<br />
) TD<br />
=<br />
K<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Ortskurve:<br />
Im<br />
PD<br />
PDT 2<br />
k<br />
PDT 3<br />
PDT 1<br />
kT D<br />
T 1<br />
Re<br />
Ideales PD-Glied<br />
G<br />
G<br />
( jω ) = k( 1+ T jω )<br />
PD-Glieder mit Verzögerung<br />
Hier beispielhaft:<br />
( jω<br />
)<br />
D<br />
( 1+<br />
T jω<br />
)<br />
D = k<br />
N<br />
(1 + T1 jω)<br />
<strong>Vorlesung</strong> Regelungstechnik 1, Institut für Systemtheorie und Regelungstechnik<br />
Prof. Dr.-Ing. Frank Allgöwer, Dipl.-Ing. Tobias Schweickhardt 4
<strong>zu</strong> <strong>Kap</strong>. <strong>III.1.2</strong> e) <strong>Ortskurven</strong><br />
PID-Glieder<br />
E<br />
PID-Glieder<br />
E<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Differentialgleichung:<br />
t<br />
2<br />
T2<br />
&& y + T1<br />
y&<br />
+ y = Ku + KI<br />
∫ u<br />
0<br />
⎡ t<br />
1<br />
= K ⎢u<br />
+ ∫ u<br />
⎢⎣<br />
TI<br />
0<br />
Übertragungsfunktion:<br />
G<br />
() s<br />
=<br />
K<br />
T<br />
I<br />
( τ )<br />
2<br />
T T s + T s + 1<br />
dτ<br />
+ KDu&<br />
( τ )<br />
⎤<br />
dτ<br />
+ TDu&<br />
⎥<br />
⎥⎦<br />
I D I<br />
=<br />
2 2<br />
2 2<br />
( T s + T s + 1) T s + T s + 1<br />
s<br />
2<br />
1<br />
K<br />
I<br />
K<br />
Ds<br />
+ K +<br />
s<br />
2<br />
1<br />
K ... Proportionalkonstante<br />
T I<br />
... Nachstellzeit<br />
T D<br />
... Vorhaltezeit<br />
Universität Stuttgart <strong>Vorlesung</strong> Regelungstechnik 1<br />
Ortskurve:<br />
Im<br />
PID<br />
k<br />
kT D<br />
T1<br />
PIDT 2<br />
kT 1<br />
T I<br />
PIDT 1<br />
Re<br />
<strong>Vorlesung</strong> Regelungstechnik 1, Institut für Systemtheorie und Regelungstechnik<br />
Prof. Dr.-Ing. Frank Allgöwer, Dipl.-Ing. Tobias Schweickhardt 5












