Sensoren - Produkte, Grundlagen und Anwendungen - Moeller
Sensoren - Produkte, Grundlagen und Anwendungen - Moeller
Sensoren - Produkte, Grundlagen und Anwendungen - Moeller

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
104 <strong>Sensoren</strong><br />
Induktive Näherungssensoren<br />
<strong>Gr<strong>und</strong>lagen</strong><br />
Induktive<br />
Näherungssensoren<br />
Mit dem induktiven Näherungssensor<br />
können metallische Objekte erkannt<br />
werden. Der Sensor baut hierzu ein<br />
elektromagnetisches Feld auf.<br />
Da sie Objekte über kurze Entfernungen<br />
erfassen können, eignen sich<br />
induktive Näherungssensoren hervorragend<br />
für Messungen <strong>und</strong> Prüfungen<br />
hoher Genauigkeit.<br />
Stärken & Schwächen<br />
Stärken<br />
• Unempfindlich gegen Umweltbedingungen.<br />
• Hohe Schaltfrequenzen für schnelle<br />
Vorgänge.<br />
• Erkennung metallischer Zielobjekte<br />
durch nichtmetallische Hindernisse<br />
hindurch.<br />
• Hohe Lebensdauer mit praktisch<br />
unbegrenzten Schaltspielen.<br />
• Prellfreie Schaltausgänge; z. B. zur<br />
SPS-Steuerung.<br />
Schwächen<br />
• Begrenzter Erfassungsbereich<br />
(maximal 25 mm, bei E56-Serie auch<br />
bis 100 mm).<br />
• Erkennt nur metallische Objekte.<br />
• Beeinträchtigung durch Metallspäne<br />
auf Sensorfläche möglich.<br />
Anwendungsbereiche<br />
Näherungssensoren werden in zahlreichen<br />
Anwendungsbereichen eingesetzt.<br />
So zum Beispiel,<br />
• um das Verfahrwegende eines<br />
Positioniertisches zu erkennen,<br />
• um eine Drehzahl durch Zählen der<br />
Zähne eines Zahnrads zu bestimmen<br />
oder<br />
• um zu prüfen, ob ein Ventil vollständig<br />
geöffnet oder geschlossen ist.<br />
Mit Näherungssensoren kann festgestellt<br />
werden, ob sich metallische<br />
Werkstücke oder Werkstückträger auf<br />
Transportbändern befinden.<br />
Induktive <strong>Sensoren</strong> können bei der<br />
Steuerung von Roboterarmen eingesetzt<br />
werden. Sie können z. B. sicherstellen,<br />
dass Objekte tatsächlich<br />
richtig gegriffen werden.<br />
Bei der Metallbearbeitung können<br />
Näherungssensoren sicherstellen,<br />
dass das Werkstück richtig eingespannt<br />
<strong>und</strong> z. B. der Bohrer nicht<br />
abgebrochen ist.<br />
Aufbau<br />
Betrachten wir nun schrittweise die<br />
Komponenten <strong>und</strong> den Prozess:<br />
Komponenten<br />
Ein Metallgegenstand (Zielobjekt) wird<br />
in das Messfeld gebracht.<br />
Die Sensorspule ist eine Drahtspule,<br />
die typischerweise um einen Ferritkern<br />
gewickelt ist. Diese Spule<br />
erzeugt ein kegelförmiges elektromagnetisches<br />
Feld. Das Zielobjekt<br />
bewegt sich durch dieses Feld.<br />
Der Ferritkern bestimmt die Form des<br />
Feldes <strong>und</strong> die Größe der Spule<br />
bestimmt den Erfassungsbereich.<br />
Der Oszillatorschaltkreis lässt das<br />
Feld mit einer bestimmten Hochfrequenz<br />
schwingen (100 kHz bis 1 MHz).<br />
In das Feld eingebrachtes Metall verändert<br />
die Schwingung. Am Zielobjekt<br />
bilden sich Wirbelströme, die dem<br />
Feld Energie entziehen. Das metallische<br />
Objekt bewirkt eine Veränderung<br />
des Magnetfeldes. Diese Veränderung<br />
dämpft das Signal zur Sensorspule.<br />
Die Amplitude wird reduziert.<br />
Der Detektorschaltkreis erkennt die<br />
Änderung <strong>und</strong> schaltet bei einem<br />
bestimmten Sollwert. Dieses Signal<br />
wiederum erzeugt eine Änderung am<br />
Schaltausgang.<br />
Der Ausgang bleibt aktiv, bis das Zielobjekt<br />
das Messfeld verlässt. Der<br />
Oszillator antwortet mit einer Erhöhung<br />
der Amplitude, <strong>und</strong> bei Erreichen<br />
des Sollwerts schaltet der Detektorschaltkreis<br />
um. Der Ausgang kehrt<br />
dann zu seinem Normalzustand<br />
zurück.<br />
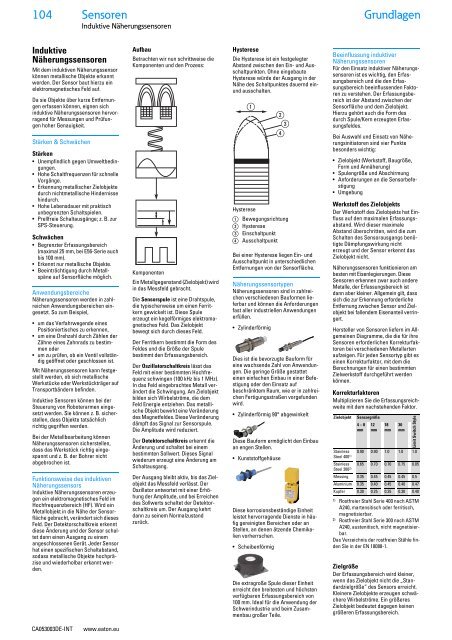
Hysterese<br />
Die Hysterese ist ein festgelegter<br />
Abstand zwischen den Ein- <strong>und</strong> Ausschaltpunkten.<br />
Ohne eingebaute<br />
Hysterese würde der Ausgang in der<br />
Nähe des Schaltpunktes dauernd ein<strong>und</strong><br />
ausschalten.<br />
1<br />
2<br />
3<br />
4<br />
Hysterese<br />
a Bewegungsrichtung<br />
b Hysterese<br />
c Einschaltpunkt<br />
d Ausschaltpunkt<br />
Bei einer Hysterese liegen Ein- <strong>und</strong><br />
Ausschaltpunkt in unterschiedlichen<br />
Entfernungen von der Sensorfläche.<br />
Näherungssensortypen<br />
Näherungssensoren sind in zahlreichen<br />
verschiedenen Bauformen lieferbar<br />
<strong>und</strong> können die Anforderungen<br />
fast aller industriellen <strong>Anwendungen</strong><br />
erfüllen.<br />
• Zylinderförmig<br />
Dies ist die bevorzugte Bauform für<br />
eine wachsende Zahl von <strong>Anwendungen</strong>.<br />
Die geringe Größe gestattet<br />
einen einfachen Einbau in einer Befestigung<br />
oder den Einsatz auf<br />
beschränktem Raum, wie er in zahlreichen<br />
Fertigungsstraßen vorgef<strong>und</strong>en<br />
wird.<br />
• Zylinderförmig 90° abgewinkelt<br />
Diese Bauform ermöglicht den Einbau<br />
an engen Stellen.<br />
• Kunststoffgehäuse<br />
Beeinflussung induktiver<br />
Näherungssensoren<br />
Für den Einsatz induktiver Näherungssensoren<br />
ist es wichtig, den Erfassungsbereich<br />
<strong>und</strong> die den Erfassungsbereich<br />
beeinflussenden Faktoren<br />
zu verstehen. Der Erfassungsbereich<br />
ist der Abstand zwischen der<br />
Sensorfläche <strong>und</strong> dem Zielobjekt.<br />
Hierzu gehört auch die Form des<br />
durch Spule/Kern erzeugten Erfassungsfeldes.<br />
Bei Auswahl <strong>und</strong> Einsatz von Näherungsinitiatoren<br />
sind vier Punkte<br />
besonders wichtig:<br />
• Zielobjekt (Werkstoff, Baugröße,<br />
Form <strong>und</strong> Annäherung)<br />
• Spulengröße <strong>und</strong> Abschirmung<br />
• Anforderungen an die Sensorbefestigung<br />
• Umgebung<br />
Werkstoff des Zielobjekts<br />
Der Werkstoff des Zielobjekts hat Einfluss<br />
auf den maximalen Erfassungsabstand.<br />
Wird dieser maximale<br />
Abstand überschritten, wird die zum<br />
Schalten des Sensorausgangs benötigte<br />
Dämpfungswirkung nicht<br />
erzeugt <strong>und</strong> der Sensor erkennt das<br />
Zielobjekt nicht.<br />
Näherungssensoren funktionieren am<br />
besten mit Eisenlegierungen. Diese<br />
<strong>Sensoren</strong> erkennen zwar auch andere<br />
Metalle, der Erfassungsbereich ist<br />
dann aber kleiner. Allgemein gilt, dass<br />
sich die zur Erkennung erforderliche<br />
Entfernung zwischen Sensor <strong>und</strong> Zielobjekt<br />
bei fallendem Eisenanteil verringert.<br />
Hersteller von <strong>Sensoren</strong> liefern im Allgemeinen<br />
Diagramme, die die für ihre<br />
<strong>Sensoren</strong> erforderlichen Korrekturfaktoren<br />
bei verschiedenen Metallarten<br />
aufzeigen. Für jeden Sensortyp gibt es<br />
einen Korrekturfaktor, mit dem die<br />
Berechnungen für einen bestimmten<br />
Zielwerkstoff durchgeführt werden<br />
können.<br />
Korrekturfaktoren<br />
Multiplizieren Sie die Erfassungsreichweite<br />
mit dem nachstehenden Faktor.<br />
Zielobjekt<br />
Sensorgröße<br />
4 – 8<br />
mm<br />
12<br />
mm<br />
18<br />
mm<br />
30<br />
mm<br />
Limit Switch Style<br />
Stainless 0.90 0.90 1.0 1.0 1.0<br />
Steel 400 1)<br />
Stainless 0.65 0.70 0.70 0.75 0.85<br />
Steel 300 2)<br />
Messing 0.35 0.45 0.45 0.45 0.5<br />
Aluminium 0.35 0.40 0.45 0.40 0.47<br />
Kupfer 0.30 0.25 0.35 0.30 0.40<br />
Funktionsweise des induktiven<br />
Näherungssensors<br />
Induktive Näherungssensoren erzeugen<br />
ein elektromagnetisches Feld im<br />
Hochfrequenzbereich (HF). Wird ein<br />
Metallobjekt in die Nähe der Sensorfläche<br />
gebracht, verändert sich dieses<br />
Feld. Der Detektorschaltkreis erkennt<br />
diese Änderung <strong>und</strong> der Sensor schaltet<br />
dann einen Ausgang zu einem<br />
angeschlossenen Gerät. Jeder Sensor<br />
hat einen spezifischen Schaltabstand,<br />
sodass metallische Objekte hochpräzise<br />
<strong>und</strong> wiederholbar erkannt werden.<br />
Diese korrosionsbeständige Einheit<br />
leistet hervorragende Dienste in häufig<br />
gereinigten Bereichen oder an<br />
Stellen, an denen ätzende Chemikalien<br />
vorherrschen.<br />
• Scheibenförmig<br />
Die extragroße Spule dieser Einheit<br />
erreicht den breitesten <strong>und</strong> höchsten<br />
verfügbaren Erfassungsbereich von<br />
100 mm. Ideal für die Anwendung der<br />
Schwerindustrie <strong>und</strong> beim Zusammenbau<br />
großer Teile.<br />
1) Rostfreier Stahl Serie 400 nach ASTM<br />
A240, martensitisch oder ferritisch,<br />
magnetisierbar.<br />
2) Rostfreier Stahl Serie 300 nach ASTM<br />
A240, austenitisch, nicht magnetisierbar.<br />
Das Verzeichnis der rostfreien Stähle finden<br />
Sie in der EN 10088-1.<br />
Zielgröße<br />
Der Erfassungsbereich wird kleiner,<br />
wenn das Zielobjekt nicht die „Standardzielgröße”<br />
des Sensors erreicht.<br />
Kleinere Zielobjekte erzeugen schwächere<br />
Wirbelströme. Ein größeres<br />
Zielobjekt bedeutet dagegen keinen<br />
größeren Erfassungsbereich.<br />
CA053003DE-INT<br />
www.eaton.eu