vmp о о â = F о - Physik
vmp о о â = F о - Physik
vmp о о â = F о - Physik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
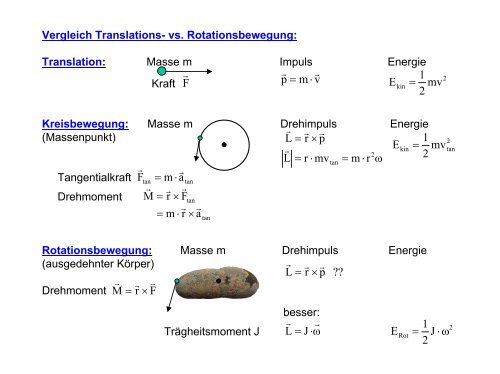
Vergleich Translations- vs. Rotationsbewegung:<br />
Translation: Masse m Impuls Energie<br />
r r<br />
Kraft F r p = m ⋅ v<br />
1 2<br />
E<br />
kin<br />
= mv<br />
2<br />
Kreisbewegung: Masse m Drehimpuls r<br />
Energie<br />
r r<br />
(Massenpunkt)<br />
L =<br />
× p<br />
1<br />
r<br />
E =<br />
2<br />
L = r ⋅ mv<br />
tan<br />
= m ⋅ r ω 2<br />
r r<br />
Tangentialkraft Ftan = m ⋅a tan<br />
r r r<br />
Drehmoment M =<br />
× Ftan<br />
r r<br />
= m ⋅<br />
× a<br />
tan<br />
2<br />
kin<br />
mv tan<br />
Rotationsbewegung: Masse m Drehimpuls Energie<br />
(ausgedehnter Körper)<br />
r r r<br />
L =<br />
× p ??<br />
r r r<br />
Drehmoment M =<br />
× F<br />
Trägheitsmoment J<br />
besser:<br />
r r<br />
L = J ⋅ω<br />
E<br />
Rot<br />
1 2<br />
= J ⋅ ω<br />
2
Äquivalente physikalische Größen bei Translations- und Rotationsbewegungen:<br />
Masse m ↔ Trägheitsmoment J<br />
Ortskoordinate r<br />
↔ Winkel ϕ r<br />
r<br />
r<br />
r dr<br />
r dϕ<br />
Geschwindigkeit v = ↔ Winkelgeschwindigkeit ω =<br />
dt<br />
dt<br />
2<br />
d<br />
Beschleunigung a<br />
r r<br />
2r<br />
r d ϕ<br />
= ↔ Winkelbeschleunigung α =<br />
2<br />
dt<br />
dt<br />
2<br />
r r<br />
r r r r<br />
Impuls p = m ⋅ v ↔ Drehimpuls L =<br />
× p = J ⋅ω<br />
r r<br />
r r r r<br />
Kraft F = m ⋅a<br />
↔ Drehmoment M =<br />
× p = J ⋅ α<br />
r<br />
r<br />
r<br />
dp<br />
r<br />
F =<br />
dL<br />
M =<br />
dt<br />
dt<br />
m 2<br />
kinetische Energie Ekin<br />
= ⋅ v ↔ Rotationsenergie<br />
2<br />
E<br />
Rot<br />
=<br />
J<br />
2<br />
⋅ω<br />
2
5.3 Trägheitsmoment<br />
Definition des Trägheitsmoments J:<br />
Für eine Masse ∆m im Abstand r<br />
von der Drehachse:<br />
J<br />
= r<br />
2<br />
∆ m<br />
r<br />
L<br />
= ∆mr<br />
2<br />
r<br />
⋅ ω =<br />
r<br />
J ⋅ ω<br />
Für n Massenelemente ∆m i<br />
im Abstand r i<br />
von der gemeinsamen Drehachse:<br />
J<br />
=<br />
n<br />
∑<br />
i=<br />
1<br />
J<br />
i<br />
=<br />
n<br />
∑<br />
i=<br />
1<br />
r<br />
2<br />
i<br />
∆m<br />
i<br />
Für eine kontinuierliche Massenverteilung:<br />
J<br />
=<br />
m ges<br />
∫<br />
0<br />
r 2 dm<br />
oder mit dm = ρ 0<br />
dV und ρ 0<br />
= konstante Dichte<br />
V ges<br />
∫<br />
2<br />
J = ρ0 r dV<br />
0<br />
Beachte:<br />
Das Trägheitsmoment J ist immer bzgl. einer Drehachse definiert;<br />
wird die Drehachse verändert, so ändert sich auch J.<br />
Falls nicht anders angegeben, verlaufen die Drehachsen immer durch den Schwerpunkt.
Trägheitsmomente einiger spezieller Körper:<br />
Kugel (massiv)<br />
Hohlzylinder<br />
Quader (massiv)<br />
Vollzylinder
Hintergrundinformation:<br />
Herleitung des Trägkeitsmoments am Beispiel eines massiven Zylinders:<br />
Verfahren:<br />
Zylindersegment der Höhe h und der Dicke dr wird über r integriert.<br />
m<br />
ges<br />
2<br />
3<br />
J = ∫ r dm → J = 2πρ0h∫<br />
r dr mit dm = ρ0<br />
0<br />
πρ h 4 R πρ0h<br />
4<br />
J =<br />
0 r | R<br />
0<br />
=<br />
2 2<br />
R<br />
0<br />
⋅ 2π r ⋅ h ⋅dr<br />
Geometrie:<br />
Scheibe mit Radius R<br />
und konstanter Dichte ρ 0<br />
mit Zylindervolumen V<br />
= R 2 π ⋅ h<br />
m<br />
und ρ 0<br />
= folgt (m = Masse der Kugel)<br />
V<br />
m πh<br />
J =<br />
=<br />
R πh<br />
2<br />
1<br />
2<br />
4<br />
2<br />
R mR<br />
2<br />
J =<br />
1 2<br />
m R<br />
2<br />
Trägheitsmoment eines massiven Zylinders
Hintergrundinformation:<br />
Herleitung eines Trägkeitsmoments am Beispiel der massiven Kugel:<br />
Verfahren:<br />
Integration eines Zylindersegments der Länge 2l<br />
und der Dicke dr wird über r integriert.<br />
Geometrie:<br />
J<br />
mges<br />
R<br />
=<br />
2<br />
∫ r dm → J = 2πρ ∫<br />
0<br />
0<br />
2lr<br />
3<br />
dr<br />
mit<br />
dm = ρ ⋅2π<br />
r ⋅ 2l⋅dr<br />
und<br />
l =<br />
R<br />
2<br />
− r<br />
2<br />
Kugel mit Radius R.<br />
J = 4πρ<br />
R<br />
∫<br />
0<br />
R<br />
2<br />
− r<br />
2<br />
3<br />
⋅ r dr<br />
Aus Formelsammlung:<br />
R<br />
∫<br />
0<br />
2 2 5/ 2<br />
2<br />
2 2 3 (R − r ) 2 (R − r<br />
R − r ⋅ r dr =<br />
− R<br />
5<br />
3<br />
)<br />
2 3/ 2<br />
⎡<br />
2<br />
(R − r )<br />
J = 4πρ⎢<br />
⎣ 5<br />
2 5/ 2<br />
− R<br />
2<br />
2<br />
2 3/ 2<br />
(R − r )<br />
3<br />
⎤<br />
⎥<br />
⎦<br />
r=<br />
R<br />
⎡<br />
2<br />
(R − r )<br />
− 4πρ⎢<br />
⎣ 5<br />
2 5/ 2<br />
− R<br />
2<br />
2<br />
2 3/ 2<br />
(R − r )<br />
3<br />
⎤<br />
⎥<br />
⎦<br />
r=<br />
0<br />
5<br />
2R<br />
J = 4πρ<br />
15<br />
4π 3<br />
m<br />
mit Kugelvolumen V = R und ρ = folgt (m = Masse der Kugel)<br />
3<br />
V<br />
J =<br />
2 2<br />
m R<br />
5<br />
Trägheitsmoment einer massiven Kugel
Anmerkungen zum Trägheitsmoment<br />
• Zusammengesetzte Körper auf gleicher Drehachse:<br />
Das Trägheitsmoment zusammengesetzter Körper ist gleich der<br />
Summe der Trägheitsmomente seiner Teile bezüglich der gleichen Drehachse.<br />
Beispiel: Hantel, bestehend aus zwei Massen m am Ende der Stange (Länge r): J = 2mr 2<br />
• Parallele Verlagerung einer Drehachse:<br />
Jede parallele Verlagerung einer Schwerpunktsdrehachse führt<br />
zu einer Erhöhung des Trägheitsmoments.<br />
J S<br />
: Drehachse geht durch Schwerpunkt S<br />
J A<br />
: Drehachse geht durch A (um a aus Schwerpunkt verschoben)<br />
Es gilt der Satz von Steiner:<br />
J A<br />
= J S<br />
+ m⋅a 2<br />
(für Körper der Masse m)<br />
• Freie Achsen:<br />
Bei einer freien Rotation im Raum (keine Lagerung d. h. Zwangsführung einer Drehachse)<br />
erfolgt die Rotation immer um den Schwerpunkt. Die Rotation erfolgt dabei um eine der drei<br />
Hauptträgheitsachsen, bevorzugt um diejenige mit dem größten Trägheitsmoment.
Definition des Schwerpunkts r s<br />
:<br />
r<br />
s<br />
=<br />
N<br />
∑<br />
k=<br />
1<br />
m<br />
m<br />
k<br />
ges<br />
r<br />
k<br />
und bei kontinuierlicher Massenverteilung (bei konstanter Dichte) in differentieller Form:<br />
r<br />
r s<br />
1 r<br />
1 r<br />
= ∫∫∫ ρ⋅ r(x, y,z)dx dy dz =<br />
ρ<br />
∫∫∫ r(x, y,z)dx dydz<br />
V<br />
V<br />
Gleichgewichtslage eines Körpers:<br />
Abhängig vom Verhalten seines Schwerpunktes bei einer Bewegung<br />
Gleichgewicht<br />
der Schwerpunkt