

Deutsche Anleitung - mapl-connect
Deutsche Anleitung - mapl-connect
Deutsche Anleitung - mapl-connect
- Keine Tags gefunden...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
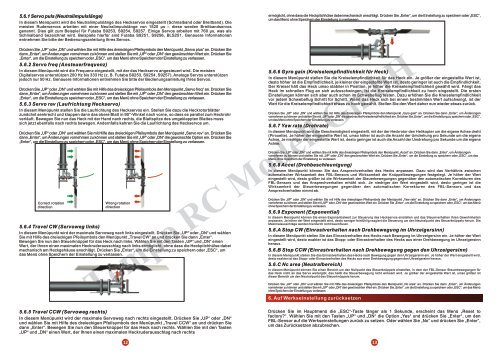
5.6.1 Servo puls (Neutralimpulslänge)In diesem Menüpunkt wird die Neutralimpulslänge des Heckservos eingestellt (Schmalband oder Breitband). Diemeisten Ruderservos arbeiten mit einer Neutralimpulslänge von 1520 μs – diese werden Breitbandservosgenannt. Dies gilt zum Beispiel für Futaba S9253, S9254, S9257. Einige Servos arbeiten mit 760 μs, was alsSchmalband bezeichnet wird. Beispiele hierfür sind Futaba S9251, S9256, BLS251. Genauere Informationenentnehmen Sie bitte der Bedienungsanleitung Ihres Servos.ermöglicht, ohne dass die Heckpitchhülse dabei mechanisch anschlägt. Drücken Sie „Enter“, um die Einstellung zu speichern oder „ESC“,um das Menü ohne Speichern der Einstellung zu verlassen..Drücken Sie „UP“ oder „DN“ und wählen Sie mit Hilfe des dreieckigen Pfeilsymbols den Menüpunkt „Servo plus“ an. Drücken Siedann „Enter“, um Änderungen vornehmen zu können und stellen Sie mit „UP“ oder „DN“ den gewünschten Wert ein. Drücken Sie„Enter“, um die Einstellung zu speichern oder „ESC“, um das Menü ohne Speichern der Einstellung zu verlassen.5.6.2 Servo freq (Ansteuerfrequenz)In diesem Menüpunkt wird die Frequenz eingestellt, mit der das Heckservo angesteuert wird. Die meistenDigitalservos unterstützen 200 Hz bis 333 Hz (z. B. Futaba S9253, S9254, S9257). Analoge Servos unterstützenjedoch nur 50 Hz. Genauere Informationen entnehmen Sie bitte der Bedienungsanleitung Ihres Servos.Drücken Sie „UP“ oder „DN“ und wählen Sie mit Hilfe des dreieckigen Pfeilsymbols den Menüpunkt „Servo freq“ an. Drücken Siedann „Enter“, um Änderungen vornehmen zu können und stellen Sie mit „UP“ oder „DN“ den gewünschten Wert ein. Drücken Sie„Enter“, um die Einstellung zu speichern oder „ESC“, um das Menü ohne Speichern der Einstellung zu verlassen.5.6.3 Servo rev (Laufrichtung Heckservo)In diesem Menüpunkt stellen Sie die Laufrichtung des Heckservos ein. Stellen Sie dazu die Heckrotorblätterzunächst senkrecht und klappen dann das obere Blatt in 90°-Winkel nach vorne, so dass es parallel zum Heckrohrverläuft. Bewegen Sie nun das Heck mit der Hand nach rechts, die Blattspitze des umgeklappten Blattes musssich jetzt ebenfalls nach rechts bewegen. Andernfalls kehren Sie die Laufrichtung des Heckservos um.Drücken Sie „UP“ oder „DN“ und wählen Sie mit Hilfe des dreieckigen Pfeilsymbols den Menüpunkt „Servo rev“ an. Drücken Siedann „Enter“, um Änderungen vornehmen zu können und stellen Sie mit „UP“ oder „DN“ die gewünschte Option ein. Drücken Sie„Enter“, um die Einstellung zu speichern oder „ESC“, um das Menü ohne Speichern der Einstellung zu verlassen.Correct rotationdirectionWrong rotationdirection5.6.4 Travel CW (Servoweg links)In diesem Menüpunkt wird der maximale Servoweg nach links eingestellt. Drücken Sie „UP“ oder „DN“ und wählenSie mit Hilfe des dreieckigen Pfeilsymbols den Menüpunkt „Travel CW“ an und drücken Sie dann „Enter“.Bewegen Sie nun den Steuerknüppel für das Heck nach links. Wählen Sie mit den Tasten „UP“ und „DN“ einenWert, der Ihnen einen maximalen Heckruderausschlag nach links ermöglicht, ohne dass die Heckpitchhülse dabeimechanisch am Heckgehäuse anschlägt. Drücken Sie „Enter“, um die Einstellung zu speichern oder „ESC“, umdas Menü ohne Speichern der Einstellung zu verlassen.5.6.6 Gyro gain (Kreiselempfindlichkeit für Heck)In diesem Menüpunkt stellen Sie die Kreiselempfindlichkeit für das Heck ein. Je größer der eingestellte Wert ist,desto höher ist die Empfindlichkeit, je kleiner der eingestellte Wert ist, desto geringer ist auch die Empfindlichkeit.Der Kreisel hält das Heck umso stabiler in Position, je höher die Kreiselempfindlichkeit gewählt wird. Fängt dasHeck im schnellen Flug an sich aufzuschwingen, ist die Kreiselempfindlichkeit zu hoch eingestellt. Die erstenEinstellungen können sich aber auch schon im Schwebeflug testen. Dazu erhöhen Sie die Kreiselempfindlichkeitvor jedem Schwebeflug Schritt für Schritt. Wenn das Heck sich bei einem bestimmten Wert aufschwingt, ist derWert für die Kreiselempfindlichkeit etwas zu hoch gewählt. Stellen Sie den Wert daher nun wieder etwas zurück.Drücken Sie „UP“ oder „DN“ und wählen Sie mit Hilfe des dreieckigen Pfeilsymbols den Menüpunkt „Gyro gain“ an. Drücken Sie dann „Enter“, um Änderungenvornehmen zu können und stellen Sie mit „UP“ oder „DN“ die gewünschte Kreiselempfindlichkeit ein. Drücken Sie „Enter“, um die Einstellung zu speichern oder „ESC“,um das Menü ohne Speichern der Einstellung zu verlassen.5.6.7 Yaw rate (Drehrate)In diesem Menüpunkt wird die Geschwindigkeit eingestellt, mit der der Heckrotor den Helikopter um die eigene Achse dreht(Pirouette). Je höher der eingestellte Wert ist, umso höher ist auch die Anzahl der Umdrehung pro Sekunde um die eigeneAchse. Je niedriger der eingestellte Wert ist, desto geringer ist auch die Anzahl der Umdrehung pro Sekunde um die eigeneAchse.Drücken Sie „UP“ oder „DN“ und wählen Sie mit Hilfe des dreieckigen Pfeilsymbols den Menüpunkt „Accel“ an. Drücken Sie dann „Enter“, um Änderungenvornehmen zu können und stellen Sie mit „UP“ oder „DN“ den gewünschten Wert ein. Drücken Sie „Enter“, um die Einstellung zu speichern oder „ESC“, um dasMenü ohne Speichern der Einstellung zu verlassen5.6.8 Accel (Drehbeschleunigung)In diesem Menüpunkt können Sie das Ansprechverhalten des Hecks anpassen. Dazu wird das Verhältnis zwischenautomatischer Wirksamkeit des FBL-Sensors und Wirksamkeit der Knüppelbewegungen festgelegt. Je höher der Werteingestellt wird, desto größer ist die Wirksamkeit der Steuerbewegungen gegenüber den automatischen Korrekturen desFBL-Sensors und das Ansprechverhalten erhöht sich. Je niedriger der Wert eingestellt wird, desto geringer ist dieWirksamkeit der Steuerbewegungen gegenüber den automatischen Korrekturen des FBL-Sensors und dasAnsprechverhalten nimmt ab.Drücken Sie „UP“ oder „DN“ und wählen Sie mit Hilfe des dreieckigen Pfeilsymbols den Menüpunkt „Yaw rate“ an. Drücken Sie dann „Enter“, um Änderungenvornehmen zu können und stellen Sie mit „UP“ oder „DN“ den gewünschten Wert ein. Drücken Sie „Enter“, um die Einstellung zu speichern oder „ESC“, um das Menüohne Speichern der Einstellung zu verlassen.5.6.9 Exponent (Exponential)In diesem Menüpunkt können Sie einen Exponentialwert zur Steuerung des Heckservos einstellen und das Steuerverhalten Ihren Gewohnheitenanpassen. Je höher der Wert eingestellt wird, desto weniger feinfühlig reagiert die Steuerung um den Neutralpunkt des Steuerknüppels herum. DieMaximalausschläge werden hierdurch nicht beeinflusst.5.6.A Stop CW (Einrastverhalten nach Drehbewegung im Uhrzeigersinn)In diesem Menüpunkt stellen Sie das Einrastverhalten des Hecks nach Bewegung im Uhrzeigersinn ein. Je höher der Werteingestellt wird, desto exakter ist das Stopp- oder Einrastverhalten des Hecks aus einer Drehbewegung im Uhrzeigersinnheraus.5.6.B Stop CCW (Einrastverhalten nach Drehbewegung gegen den Uhrzeigersinn)In diesem Menüpunkt stellen Sie das Einrastverhalten des Hecks nach Bewegung gegen den Uhrzeigersinn ein. Je höher der Wert eingestellt wird,desto exakter ist das Stopp- oder Einrastverhalten des Hecks aus einer Drehbewegung gegen den Uhrzeigersinn heraus.5.6.C Nc area (Neutralbereich)In diesem Menüpunkt können Sie einen Bereich um den Nullpunkt des Steuerknüppels einstellen, in dem der FBL-Sensor Steuerbewegungen fürdas Heck nicht an das Servo weitergibt, das heißt die Steuerbewegung nicht wirksam wird. Je größer der eingestellte Wert ist, umso größer istdieser Bereich um den Neutralpunkt des Steuerknüppels herum.Tempo RC Modell GmbHDrücken Sie „UP“ oder „DN“ und wählen Sie mit Hilfe des dreieckigen Pfeilsymbols den Menüpunkt „Nc area“ an. Drücken Sie dann „Enter“, um Änderungenvornehmen zu können und stellen Sie mit „UP“ oder „DN“ den gewünschten Wert ein. Drücken Sie „Enter“, um die Einstellung zu speichern oder „ESC“, um das Menüohne Speichern der Einstellung zu verlassen.6. Auf Werkseinstellung zurücksetzen5.6.5 Travel CCW (Servoweg rechts)In diesem Menüpunkt wird der maximale Servoweg nach rechts eingestellt. Drücken Sie „UP“ oder „DN“und wählen Sie mit Hilfe des dreieckigen Pfeilsymbols den Menüpunkt „Travel CCW“ an und drücken Siedann „Enter“. Bewegen Sie nun den Steuerknüppel für das Heck nach rechts. Wählen Sie mit den Tasten„UP“ und „DN“ einen Wert, der Ihnen einen maximalen Heckruderausschlag nach rechts12Drücken Sie im Hauptmenü die „ESC“-Taste länger als 1 Sekunde, erscheint das Menü „Reset tofactory?“. Wählen Sie mit den Tasten „UP“ und „DN“ die Option „Yes“ und drücken Sie „Enter“, um denFBL-Sensor auf die Werkseinstellungen zurück zu setzen. Oder wählen Sie „No“ und drücken Sie „Enter“,um das Zurücksetzen abzubrechen.13