EATON_Sortimentskatalog_Antriebstechnik-effizient-gestalten-Motoren-starten-und-steuern_2016_DE
- TAGS
- brand-eaton

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
64 PowerXL Frequenzumrichter<br />
Allgemeine Informationen zur Projektierung<br />
Allgemeine Informationen zur Projektierung<br />
Steuerverfahren<br />
Die IGBTs im Wechselrichter der<br />
Frequenzumrichter werden mit einer<br />
sinusbewerteten Puls-Weiten-Modulation<br />
(PWM) gesteuert. In der Praxis<br />
unterscheidet man dabei folgende<br />
Steuerverfahren:<br />
• Spannungs-Frequenz-Steuerung<br />
(U/f-Steuerung),<br />
• U/f-Steuerung mit Schlupfkompensation<br />
• sensorlose Vektorsteuerung (Drehzahlsteuerung),<br />
• Vektorregelung, Drehzahlregelung<br />
(closed loop).<br />
Die Spannungs-Frequenz-Steuerung<br />
ist das bekannteste <strong>und</strong> am häufigsten<br />
angewandte Verfahren. Hierbei wird<br />
über eine einfache Kennlinie (linear<br />
oder quadratisch) die Drehfeldfrequenz<br />
für den Motor vorgegeben <strong>und</strong><br />
die entsprechende dreiphasig verkette<br />
Motorphasenspannung derart ausgewählt,<br />
dass der Motor weder unternoch<br />
übermagnetisiert ist.<br />
Hauptanwendungen der U/f-Steuerung<br />
sind:<br />
• Pumpen- <strong>und</strong> Lüfterantriebe,<br />
• Horizontale Förder- <strong>und</strong> Transporteinrichtungen,<br />
• Mehrmotorenantriebe (Parallelbetrieb<br />
mehrerer <strong>Motoren</strong> im Ausgang<br />
eines Frequenzumrichters).<br />
Bei der U/f-Steuerung mit Schlupfkompensation<br />
kann die lastabhängige<br />
Drehzahländerung bei Einzelantrieben<br />
kompensiert werden (sensorlos).<br />
Bei der sensorlosen Vektorsteuerung<br />
werden die Magnetfelder von Läufer<br />
<strong>und</strong> Ständerwicklung gegeneinander<br />
ausgerichtet. Beim Asynchronmotor<br />
muss dazu der magnetische Fluss im<br />
Läufer über ein elektronisches Motormodell<br />
nachgebildet werden. Dies<br />
erfordert die Eingabe der physikalischen<br />
Parameter vom Leistungsschild<br />
des Motors.<br />
Im Vektorbetrieb kann der Frequenzumrichter<br />
nur einen einzelnen Motor<br />
im Ausgang <strong>steuern</strong>. Der Parallelbetrieb<br />
mehrerer <strong>Motoren</strong> ist hier nicht<br />
möglich. Durch die exakte Berechnung<br />
der Phasenspannungen im<br />
Ausgang des Frequenzumrichters wird<br />
allerdings das Betriebsverhalten des<br />
einzelnen Motors verbessert. Zudem<br />
wird im unteren Drehzahlbereich die<br />
Motorerwärmung reduziert. Die feldorientierte<br />
Vektorsteuerung bewirkt<br />
eine deutliche Erhöhung der Antriebsdynamik<br />
sowie eine Leistungsoptimierung<br />
<strong>und</strong> steigert die Anzahl der<br />
Verwendungsmöglichkeiten.<br />
Hauptanwendungen der sensorlosen<br />
Vektorsteuerung sind:<br />
• Materialbearbeitungs- <strong>und</strong> verarbeitungsmaschinen,<br />
• Verdichter (Kompressor),<br />
• Schweranlauf (Extruder, Rührwerke,<br />
Mischer),<br />
• Hub- <strong>und</strong> Hebeeinrichtungen (vertikale<br />
Förderung, Kran, Aufzug).<br />
Bei der Vektorregelung dient der<br />
Ausgangsstrom des Frequenzumrichters<br />
als Regelgröße. Der Drehstrommotor<br />
kann dadurch optimal auf die<br />
Drehmomentforderung angepasst<br />
werden. In Verbindung mit einem<br />
Drehzahlgeber (Tacho, Impulsgeber)<br />
kann die Motordrehzahl geregelt<br />
werden (closed loop).<br />
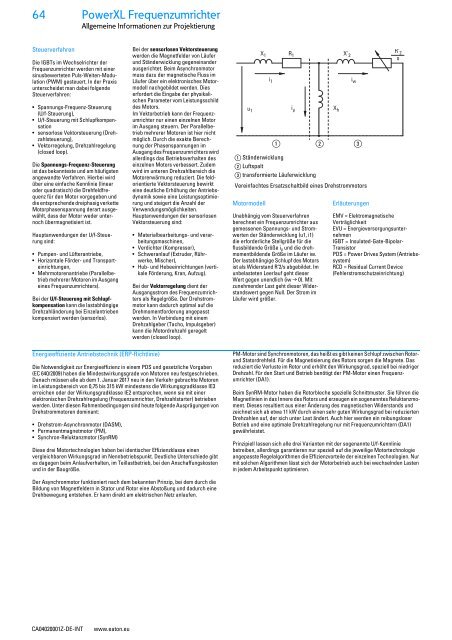
u 1<br />
1 Ständerwicklung<br />
2 Luftspalt<br />
3 transformierte Läuferwicklung<br />
Vereinfachtes Ersatzschaltbild eines Drehstrommotors<br />
Motormodell<br />
X 1<br />
i 1<br />
1<br />
2<br />
Unabhängig vom Steuerverfahren<br />
berechnet ein Frequenzumrichter aus<br />
gemessenen Spannungs- <strong>und</strong> Stromwerten<br />
der Ständerwicklung (u1, i1)<br />
die erforderliche Stellgröße für die<br />
flussbildende Größe i μ <strong>und</strong> die drehmomentbildende<br />
Größe im Läufer iw.<br />
Der lastabhängige Schlupf des Motors<br />
ist als Widerstand R‘2/s abgebildet. Im<br />
unbelasteten Leerlauf geht dieser<br />
Wert gegen unendlich (iw → 0). Mit<br />
zunehmender Last geht dieser Widerstandswert<br />
gegen Null. Der Strom im<br />
Läufer wird größer.<br />
R 1<br />
X'<br />
R' 2<br />
2<br />
s<br />
i w<br />
i μ<br />
X h<br />
3<br />
Erläuterungen<br />
EMV = Elektromagnetische<br />
Verträglichkeit<br />
EVU = Energieversorgungsunternehmen<br />
IGBT = Insulated-Gate-Bipolar-<br />
Transistor<br />
PDS = Power Drives System (Antriebssystem)<br />
RCD = Residual Current Device<br />
(Fehlerstromschutzeinrichtung)<br />
Energie<strong>effizient</strong>e <strong>Antriebstechnik</strong> (ERP-Richtlinie)<br />
Die Notwendigkeit zur Energieeffizienz in einem PDS <strong>und</strong> gesetzliche Vorgaben<br />
(EC 640/2009) haben die Mindestwirkungsgrade von <strong>Motoren</strong> neu festgeschrieben.<br />
Danach müssen alle ab dem 1. Januar 2017 neu in den Verkehr gebrachte <strong>Motoren</strong><br />
im Leistungsbereich von 0,75 bis 315 kW mindestens die Wirkungsgradklasse IE3<br />
erreichen oder der Wirkungsgradklasse IE2 entsprechen, wenn sie mit einer<br />
elektronischen Drehzahlregelung (Frequenzumrichter, Drehzahlstarter) betrieben<br />
werden. Unter diesen Rahmenbedingungen sind heute folgende Ausprägungen von<br />
Drehstrommotoren dominant:<br />
• Drehstrom-Asynchronmotor (DASM),<br />
• Permanentmagnetmotor (PM),<br />
• Synchron-Reluktanzmotor (SynRM)<br />
Diese drei Motortechnologien haben bei identischer Effizienzklasse einen<br />
vergleichbaren Wirkungsgrad im Nennbetriebspunkt. Deutliche Unterschiede gibt<br />
es dagegen beim Anlaufverhalten, im Teillastbetrieb, bei den Anschaffungskosten<br />
<strong>und</strong> in der Baugröße.<br />
PM-Motor sind Synchronmotoren, das heißt es gibt keinen Schlupf zwischen Rotor<strong>und</strong><br />
Statordrehfeld. Für die Magnetisierung des Rotors sorgen die Magnete. Das<br />
reduziert die Verluste im Rotor <strong>und</strong> erhöht den Wirkungsgrad, speziell bei niedriger<br />
Drehzahl. Für den Start <strong>und</strong> Betrieb benötigt der PM-Motor einen Frequenzumrichter<br />
(DA1).<br />
Beim SynRM-Motor haben die Rotorbleche spezielle Schnittmuster. Sie führen die<br />
Magnetlinien in das Innere des Rotors <strong>und</strong> erzeugen ein sogenanntes Reluktanzmoment.<br />
Dieses resultiert aus einer Änderung des magnetischen Widerstands <strong>und</strong><br />
zeichnet sich ab etwa 11 kW durch einen sehr guten Wirkungsgrad bei reduzierten<br />
Drehzahlen auf, der sich unter Last ändert. Auch hier werden ein reibungsloser<br />
Betrieb <strong>und</strong> eine optimale Drehzahlregelung nur mit Frequenzumrichtern (DA1)<br />
gewährleistet.<br />
Prinzipiell lassen sich alle drei Varianten mit der sogenannte U/f-Kennlinie<br />
betreiben, allerdings garantieren nur speziell auf die jeweilige Motortechnologie<br />
angepasste Regelalgorithmen die Effizienzvorteile der einzelnen Technologien. Nur<br />
mit solchen Algorithmen lässt sich der Motorbetrieb auch bei wechselnden Lasten<br />
in jedem Arbeitspunkt optimieren.<br />
Der Asynchronmotor funktioniert nach dem bekannten Prinzip, bei dem durch die<br />
Bildung von Magnetfeldern in Stator <strong>und</strong> Rotor eine Abstoßung <strong>und</strong> dadurch eine<br />
Drehbewegung entstehen. Er kann direkt am elektrischen Netz anlaufen.<br />
CA04020001Z-<strong>DE</strong>-INT<br />
www.eaton.eu