

2018_511

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
D.a. <strong>511</strong> ... aktuell * Hintergrund Oktober <strong>2018</strong><br />
Dritter Zwischenbericht zu<br />
„Autonomes, elektrisch angetriebenes Fahren in<br />
Dedinghausen“<br />
Von Andreas John und Mathias Neidnig mit Fotos von Jennifer Kunau<br />
Das Thema „Autonomes Fahren“ hat nicht nur bei<br />
Autoherstellern und Zulieferern umfangreiche Aktivtäten<br />
ausgelöst, sondern auch viele neue Start-Ups<br />
hervorgebracht.<br />
Das Start-Up Kopernikus aus Berlin beispielsweise<br />
entwickelt ein System, mit dem vorhandene Fahrzeuge<br />
so erweitert werden können, dass diese auch<br />
automatisiert fahren können [KOPERNIKUS]. In der<br />
ersten Version können für ca. 3000 Euro verschiedene<br />
Modelle von Volkswagen mit sieben Kameras,<br />
einer zentralen Steuereinheit und Software nachgerüstet<br />
werden.<br />
Das amerikanische Start-Up WaveSense entwickelt<br />
ein neues System, mit dem autonome Fahrzeuge ihre<br />
Position auf der Straße noch robuster erkennen<br />
können sollen [WAVESENSE]. Dabei soll ein von<br />
der Minensuche inspirierter, senkrecht nach unten<br />
gerichteter Radar-Sensor die geologische Struktur<br />
unterhalb der Fahrbahn erfassen. Da diese Struktur<br />
von Ort zu Ort variiert, soll man, wenn diese Struktur<br />
vorher einmal aufgezeichnet wird, anschließend den<br />
zugehörigen Ort wiederfinden können.<br />
Eine früher hierzu schon einmal angedachte Technik,<br />
um Fahrzeuge automatisiert auf einer Straße zu<br />
halten, bestand darin, in der Fahrbahn in gewissen<br />
Abständen Dauermagnete einzubauen, an denen sich<br />
ein Fahrzeug mit Hilfe eines entsprechenden Magnetfeld-Sensors<br />
dann entlang hangeln kann [MAGNET].<br />
Bei unserem Fahrzeug versuchen wir jetzt, mit Hilfe<br />
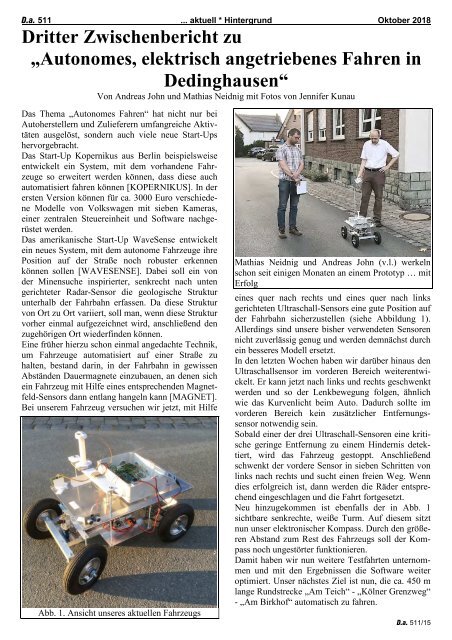
Abb. 1. Ansicht unseres aktuellen Fahrzeugs<br />
Mathias Neidnig und Andreas John (v.l.) werkeln<br />
schon seit einigen Monaten an einem Prototyp … mit<br />
Erfolg<br />
eines quer nach rechts und eines quer nach links<br />
gerichteten Ultraschall-Sensors eine gute Position auf<br />
der Fahrbahn sicherzustellen (siehe Abbildung 1).<br />
Allerdings sind unsere bisher verwendeten Sensoren<br />
nicht zuverlässig genug und werden demnächst durch<br />
ein besseres Modell ersetzt.<br />
In den letzten Wochen haben wir darüber hinaus den<br />
Ultraschallsensor im vorderen Bereich weiterentwickelt.<br />
Er kann jetzt nach links und rechts geschwenkt<br />
werden und so der Lenkbewegung folgen, ähnlich<br />
wie das Kurvenlicht beim Auto. Dadurch sollte im<br />
vorderen Bereich kein zusätzlicher Entfernungssensor<br />
notwendig sein.<br />
Sobald einer der drei Ultraschall-Sensoren eine kritische<br />
geringe Entfernung zu einem Hindernis detektiert,<br />
wird das Fahrzeug gestoppt. Anschließend<br />
schwenkt der vordere Sensor in sieben Schritten von<br />
links nach rechts und sucht einen freien Weg. Wenn<br />
dies erfolgreich ist, dann werden die Räder entsprechend<br />
eingeschlagen und die Fahrt fortgesetzt.<br />
Neu hinzugekommen ist ebenfalls der in Abb. 1<br />
sichtbare senkrechte, weiße Turm. Auf diesem sitzt<br />
nun unser elektronischer Kompass. Durch den größeren<br />
Abstand zum Rest des Fahrzeugs soll der Kompass<br />
noch ungestörter funktionieren.<br />
Damit haben wir nun weitere Testfahrten unternommen<br />
und mit den Ergebnissen die Software weiter<br />
optimiert. Unser nächstes Ziel ist nun, die ca. 450 m<br />
lange Rundstrecke „Am Teich“ - „Kölner Grenzweg“<br />
- „Am Birkhof“ automatisch zu fahren.<br />
D.a. <strong>511</strong>/15














