Kapitel 1 - Raymarine
Kapitel 1 - Raymarine
Kapitel 1 - Raymarine

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Kapitel</strong> 1: SmartPilot Bedienung<br />
1.1 Einleitung<br />
TRACK<br />
DISP<br />
STANDBY AUTO<br />
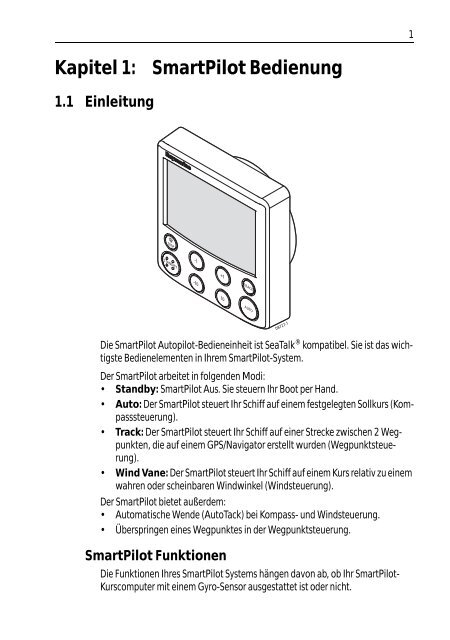
Die SmartPilot Autopilot-Bedieneinheit ist SeaTalk ® kompatibel. Sie ist das wichtigste<br />
Bedienelementen in Ihrem SmartPilot-System.<br />
Der SmartPilot arbeitet in folgenden Modi:<br />
Standby: SmartPilot Aus. Sie steuern Ihr Boot per Hand.<br />
Auto: Der SmartPilot steuert Ihr Schiff auf einem festgelegten Sollkurs (Kompasssteuerung).<br />
Track: Der SmartPilot steuert Ihr Schiff auf einer Strecke zwischen 2 Wegpunkten,<br />
die auf einem GPS/Navigator erstellt wurden (Wegpunktsteuerung).<br />
Wind Vane: Der SmartPilot steuert Ihr Schiff auf einem Kurs relativ zu einem<br />
wahren oder scheinbaren Windwinkel (Windsteuerung).<br />
Der SmartPilot bietet außerdem:<br />
Automatische Wende (AutoTack) bei Kompass- und Windsteuerung.<br />
Überspringen eines Wegpunktes in der Wegpunktsteuerung.<br />
SmartPilot Funktionen<br />
-<br />
-<br />
1<br />
10<br />
+ 1<br />
10<br />
Die Funktionen Ihres SmartPilot Systems hängen davon ab, ob Ihr SmartPilot-<br />
Kurscomputer mit einem Gyro-Sensor ausgestattet ist oder nicht.<br />
D8727-1<br />
1