Formelsammlung 3 (Schwingungen und Wellen)
Formelsammlung 3 (Schwingungen und Wellen)
Formelsammlung 3 (Schwingungen und Wellen)

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
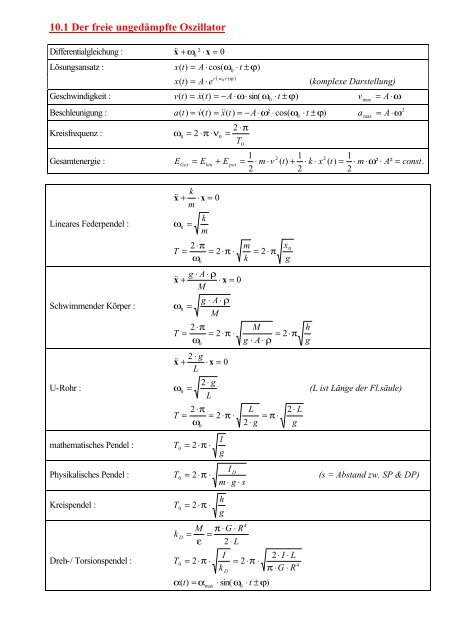
10.1 Der freie ungedämpfte Oszillator<br />
Differentialgleichung : x& & + ω ² ⋅x<br />
= 0<br />
Lösungsansatz : x ( t)<br />
= A ⋅cos(<br />
ω 0 ⋅t<br />
± ϕ)<br />
0<br />
⋅(<br />
w ⋅t±<br />
ϕ )<br />
i 0<br />
x(<br />
t)<br />
= A ⋅e<br />
(komplexe Darstellung)<br />
Geschwindigkeit : v( t)<br />
= x&<br />
( t)<br />
= −A<br />
⋅ω<br />
⋅sin(<br />
ω0<br />
⋅t<br />
± ϕ)<br />
= A ⋅ω<br />
Beschleunigung : a( t)<br />
= v&<br />
( t)<br />
= x&<br />
& ( t)<br />
= −A⋅<br />
ω ² ⋅cos(<br />
ω0<br />
⋅t<br />
± ϕ)<br />
Kreisfrequenz :<br />
ω<br />
0<br />
= 2 ⋅π<br />
⋅ν<br />
0<br />
2 ⋅π<br />
=<br />
T<br />
1 2 1 2 1<br />
Gesamtenergie : EGes = Ekin<br />
+ Epot<br />
= ⋅ m ⋅v<br />
( t)<br />
+ ⋅ k ⋅ x ( t)<br />
= ⋅ m ⋅ω<br />
² ⋅ A²<br />
= const.<br />
2 2 2<br />
Lineares Federpendel :<br />
Schwimmender Körper :<br />
U-Rohr :<br />
mathematisches Pendel :<br />
Physikalisches Pendel :<br />
Kreispendel :<br />
Dreh-/ Torsionspendel :<br />
x& &<br />
ω<br />
T<br />
x& &<br />
ω<br />
T<br />
x& &<br />
ω<br />
T<br />
k<br />
+ ⋅x<br />
= 0<br />
m<br />
0<br />
=<br />
0<br />
k<br />
m<br />
2⋅π<br />
= = 2⋅π<br />
⋅<br />
ω<br />
g ⋅ A ⋅ ρ<br />
+ ⋅ x = 0<br />
M<br />
0<br />
=<br />
g ⋅ A ⋅ ρ<br />
M<br />
0<br />
m<br />
k<br />
= 2⋅<br />
π<br />
x0<br />
g<br />
2⋅π<br />
M<br />
= = 2⋅π<br />
⋅ = 2⋅π<br />
ω g ⋅ A⋅<br />
ρ<br />
0<br />
2 ⋅ g<br />
+ ⋅x<br />
= 0<br />
L<br />
0<br />
=<br />
2⋅<br />
g<br />
L<br />
2⋅π<br />
L<br />
= = 2⋅π<br />
⋅ = π⋅<br />
ω 2⋅<br />
g<br />
0<br />
T = 2⋅π<br />
⋅<br />
0<br />
l<br />
g<br />
2⋅<br />
L<br />
g<br />
h<br />
g<br />
v max<br />
a<br />
max<br />
= A ⋅<br />
ω<br />
(L ist Länge der Fl.säule)<br />
I D<br />
T0<br />
= 2⋅π<br />
⋅<br />
(s = Abstand zw. SP & DP)<br />
m ⋅ g ⋅ s<br />
T = 2⋅π<br />
⋅<br />
k<br />
T<br />
0<br />
D<br />
0<br />
= 2⋅π<br />
⋅<br />
α(<br />
t)<br />
= α<br />
max<br />
h<br />
g<br />
4<br />
M π⋅<br />
G ⋅ R<br />
= =<br />
ε 2⋅<br />
L<br />
I<br />
k<br />
D<br />
= 2⋅π<br />
⋅<br />
⋅sin(<br />
ω ⋅t<br />
± ϕ)<br />
0<br />
2⋅<br />
I ⋅ L<br />
π⋅<br />
G ⋅ R<br />
4<br />
2
10.3 Überlagerung von <strong>Schwingungen</strong><br />
zwei <strong>Schwingungen</strong> gleicher Schwingungsrichtung <strong>und</strong> gleicher Frequenz<br />
ursprüngliche <strong>Schwingungen</strong>: x 1(<br />
t)<br />
= A1<br />
⋅sin(<br />
ω ⋅t<br />
+ ϕ1<br />
)<br />
x 2(<br />
t)<br />
= A2<br />
⋅sin(<br />
ω ⋅t<br />
+ ϕ2<br />
)<br />
resultierende Schwingung : xr ( t)<br />
= Ar<br />
⋅sin(<br />
ω ⋅t<br />
+ ϕr<br />
)<br />
A r<br />
ϕ<br />
r<br />
⋅ A1<br />
⋅ 2 ⋅cos(<br />
ϕ1 − 2 )<br />
( ϕ1<br />
) + A2<br />
⋅sin<br />
( ϕ2<br />
)<br />
( ϕ ) + A ⋅cos(<br />
ϕ )<br />
=<br />
2<br />
A1<br />
2<br />
+ A2<br />
+ 2 A ϕ<br />
A1<br />
⋅sin<br />
= arctan<br />
A ⋅ cos<br />
zwei <strong>Schwingungen</strong> gleicher Schwingungsrichtung <strong>und</strong> verschiedener Frequenz<br />
gleiche Amplitude <strong>und</strong> Phasenverschiebung<br />
��Schwebung<br />
ursprüngliche <strong>Schwingungen</strong>: x 1(<br />
t)<br />
= A⋅<br />
sin( ω 1 ⋅t<br />
+ ϕ)<br />
x t)<br />
= A ⋅sin(<br />
ω ⋅t<br />
+ ϕ)<br />
2(<br />
2<br />
resultierende Schwebung :<br />
⎛ω1 −ω2<br />
⎞ ⎛ ω1<br />
+ ω2<br />
⎞<br />
xr ( t)<br />
= 2⋅<br />
A ⋅cos⎜<br />
⎟⋅<br />
t ⋅sin<br />
⎜ ⎟⋅<br />
t<br />
⎝ 2 ⎠ ⎝ 2 ⎠<br />
Schwebungsdauer :<br />
2 ⋅π<br />
T =<br />
ω −ω<br />
Schwebungsfrequenz : = f 1− f 2<br />
f S<br />
1<br />
2<br />
⎛ 1 + 2 ⎞<br />
Dies ist eine Schwingung mit der Frequenz⎜ ⎟<br />
⎝ 2 ⎠<br />
ω ω<br />
⎛ 1 − 2 ⎞<br />
<strong>und</strong> der Amplitude 2 ⋅ A ⋅cos⎜<br />
⎟ ⋅t<br />
⎝ 2 ⎠<br />
ω ω<br />
Zweidimensionale Überlagerung �� Lissajou Figuren<br />
ursprüngliche <strong>Schwingungen</strong>: x( t)<br />
= A ⋅sin(<br />
ω ⋅t)<br />
y ( t)<br />
= B ⋅sin(<br />
ω ⋅t<br />
+ ϕ)<br />
2 2<br />
x y 2 ⋅ x ⋅ y<br />
2<br />
resultierende Schwingung : + − ⋅cosϕ<br />
= sin ϕ<br />
2 2<br />
a b a ⋅b<br />
Überlagerung mehrerer <strong>Schwingungen</strong> �� Fourier Analyse<br />
∑ ∞<br />
s=<br />
1<br />
1<br />
1<br />
( a ⋅cos(<br />
s ⋅ω<br />
⋅t<br />
) + b ⋅sin(<br />
s ⋅ ⋅t<br />
) ) y ( x)<br />
= a + ( a ⋅cos(<br />
s ⋅k<br />
⋅ x)<br />
+ b ⋅sin(<br />
s ⋅ k ⋅ x)<br />
)<br />
y( t)<br />
= a +<br />
ω<br />
a<br />
a<br />
b<br />
0<br />
s<br />
s<br />
0<br />
T<br />
1<br />
= ⋅∫<br />
f ( t)<br />
⋅dt<br />
T<br />
2<br />
= ⋅<br />
T<br />
2<br />
= ⋅<br />
T<br />
0<br />
T<br />
∫<br />
0<br />
T<br />
∫<br />
0<br />
s<br />
s<br />
a<br />
0<br />
2<br />
0<br />
∑ ∞<br />
s=<br />
1<br />
λ<br />
1<br />
= ⋅∫<br />
f ( x)<br />
⋅dx<br />
λ 0<br />
λ<br />
2<br />
f ( t)<br />
⋅cos(<br />
s ⋅ω<br />
⋅t)<br />
⋅dt<br />
= ⋅∫<br />
f ( x)<br />
⋅cos(<br />
s ⋅ k ⋅ x)<br />
⋅dx<br />
a s<br />
λ 0<br />
λ<br />
2<br />
f ( t)<br />
⋅sin(<br />
s ⋅ω<br />
⋅t)<br />
⋅dt<br />
= ⋅∫<br />
f ( x)<br />
⋅sin(<br />
s ⋅ k ⋅ x)<br />
⋅dx<br />
Fourrier-Satz : Eine Funktion f(x) ,die eine räumliche Periode λ hat, kann durch eine Summe von<br />
harmonischen Funktionen zusammengesetzt werden, deren <strong>Wellen</strong>länge ganzzahlige<br />
Teiler von λsind.<br />
b s<br />
λ 0<br />
2<br />
s<br />
s
10.4 Der freie gedämpfte Oszillator<br />
Bewegungsgleichung : m ⋅ x& & = −b<br />
⋅ x&<br />
− k ⋅ x<br />
(b ist Dämpfungskoeffizient)<br />
Differentialgleichung : x& & + 2⋅ γ ⋅x&<br />
+ ω0<br />
² ⋅x<br />
= 0<br />
Dämpfungskonstante :<br />
Eigenkreisfrequenz :<br />
b<br />
γ =<br />
2 ⋅m<br />
ω 0<br />
=<br />
k<br />
m<br />
Gesamtenergie :<br />
k<br />
− γ ⋅t<br />
2 m 2 2 − 2⋅γ<br />
⋅t<br />
EGes<br />
= ⋅ ( A ⋅ e ) = ⋅ω<br />
0 ⋅ A ⋅ e<br />
2<br />
2<br />
?????<br />
Entzogene Leistung :<br />
dEGes<br />
2 −2⋅γ<br />
⋅t<br />
P = = −γ<br />
⋅ω0<br />
⋅ A²<br />
⋅e<br />
dt<br />
= −γ<br />
⋅ EGes<br />
?????<br />
a) schwache Dämpfung, d.h.: 0 ω γ <<br />
−γ<br />
⋅t<br />
Lösungsansatz : x(<br />
t)<br />
= A ⋅e<br />
⋅ cos( ω⋅<br />
t ± ϕ)<br />
−γ⋅t<br />
⎡ ω ⎤<br />
Geschwindigkeit : v(<br />
t)<br />
= x&<br />
( t)<br />
= −A<br />
⋅γ<br />
⋅e<br />
⋅ ⎢cos(<br />
ω⋅<br />
t)<br />
+ ⋅sin(<br />
ω⋅<br />
t)<br />
⎥<br />
⎣ γ ⎦<br />
Kreisfrequenz :<br />
Periodendauer :<br />
Amplitudenverhältnis :<br />
ω = ω −γ<br />
2<br />
0<br />
2<br />
2⋅π<br />
2⋅π<br />
T = = = 2⋅<br />
π⋅<br />
ω ω²<br />
−γ<br />
²<br />
x( t + T)<br />
−γ⋅T<br />
x(<br />
t)<br />
= e<br />
4⋅<br />
m²<br />
4⋅<br />
m ⋅ k − b²<br />
−γ<br />
⋅t<br />
⎡ x( t)<br />
⎤ ⎡ e ⎤ γ⋅T<br />
Logarithmisches Dekrement : Λ = ln ⎢ =<br />
= e = ⋅T<br />
t T<br />
x t T<br />
⎥ ln ⎢ − ⋅ +<br />
e<br />
⎥ ln γ<br />
γ ( )<br />
⎣ ( + ) ⎦ ⎣ ⎦<br />
Gütefaktor :<br />
ω ω0<br />
⋅ m E<br />
Q = = = 2⋅π<br />
⋅<br />
2⋅<br />
γ b ΔE<br />
?????<br />
0 ?????<br />
Die Kreisfrequenz ω = ω²<br />
−γ<br />
² der gedämpften Schwingung bei gleicher Rückstellkraft ist kleiner,<br />
als die der ungedämpften Schwingung. Die Frequenzverschiebung wächst mit steigender Dämpfung.<br />
b) starke Dämpfung, d.h.: 0 ω γ ><br />
Kreisfrequenz : α = γ²<br />
−ω²<br />
v0<br />
−γ⋅t<br />
Lösung : x(<br />
t)<br />
= ⋅e<br />
⋅sinh(<br />
α⋅<br />
t)<br />
x ( 0)<br />
= 0 x&<br />
( 0)<br />
= v<br />
α<br />
Die Schwingung besteht aus einer einzigen Auslenkung, die für t → ∞ langsam gegen Null geht. Man<br />
nennt diesen Fall Kriechfall, eil die Amplitude nach Erreichen ihres Maximums nur sehr langsam<br />
gegen Null kriecht.<br />
c) aperiodischer Grenzfall, d.h. 0 ω γ =<br />
Lösung :<br />
x<br />
Anf.bed.: 0<br />
−γ<br />
⋅t<br />
( t)<br />
= v0<br />
⋅t<br />
⋅e<br />
Anf.bed.: x ( 0)<br />
0 x(<br />
0)<br />
= v0<br />
−γ<br />
⋅t<br />
( t)<br />
= A(<br />
1+<br />
γ ⋅t<br />
) ⋅e<br />
Anf.bed.: x( 0)<br />
= A x&<br />
( 0)<br />
= 0<br />
x<br />
= &<br />
Die Auslenkung geht am Schnellsten wieder auf Null zurück. Man spricht von optimaler Dämpfung.
10.5 Erzwungene <strong>Schwingungen</strong><br />
Differentialgleichung :<br />
2 F0<br />
x& & + 2⋅<br />
γ ⋅x&<br />
+ ω0<br />
⋅x<br />
= ⋅cos(<br />
ω⋅<br />
t)<br />
m<br />
Stationärer Fall : x ( t)<br />
= A ⋅cos(<br />
ω ⋅t<br />
+ ϕ)<br />
Phasenwinkel :<br />
Amplitude :<br />
ϕ<br />
⎛ 2 ⋅γ<br />
⋅ω<br />
arctan<br />
⎜ − 2<br />
⎝ ω 0 − ω<br />
⎞ ⎛<br />
⎟ = arctan<br />
⎜ −<br />
⎠ ⎝ m<br />
ω ⋅ b<br />
= 2<br />
2<br />
0<br />
A =<br />
F0<br />
Erregeramplitude : xErreger = 2<br />
m ⋅ω<br />
Gütefaktor :<br />
ω0<br />
Q =<br />
2⋅<br />
γ<br />
⎞<br />
( ) ⎟⎟<br />
2<br />
ω − ω<br />
2 2 2 2 2<br />
2 2 2 2 2 2<br />
( ω −ω<br />
) + 4 ⋅γ<br />
⋅ω<br />
m ⋅ ( ω −ω<br />
) + b ⋅ω<br />
Resonanz : ω R =<br />
2 2<br />
ω0<br />
− 2⋅<br />
γ =<br />
2<br />
2 b<br />
ω0<br />
− 2<br />
2⋅<br />
m<br />
A R =<br />
2 ⋅ m ⋅ γ<br />
F 0<br />
⋅ ω 2 − γ 2<br />
Resonanzüberhöhung :<br />
x<br />
x<br />
Re sonanz<br />
Erreger<br />
Halbwertsbreite : Δω = 3 ⋅γ<br />
10.9 Mechanische <strong>Wellen</strong><br />
0<br />
0<br />
F<br />
0<br />
m<br />
2<br />
ω0<br />
=<br />
2⋅γ ⋅ γ<br />
=<br />
( )<br />
0<br />
2 2 ( ω − )<br />
Eine Welle ist ein Vorgang, bei dem sich eine Schwingung vom Ort ihrer Erregung infolge von<br />
Kopplung an benachbarte, schwingungsfähige Systeme, im Raum ausbreitet.<br />
2 2 2<br />
2<br />
2<br />
∂ ξ ∂ ξ ∂ ξ 1 ∂ ξ 1 ∂ ξ<br />
<strong>Wellen</strong>differentialgleichung : + + − ⋅ = Δξ<br />
− ⋅ = 0<br />
2 2 2 2 2<br />
2 2<br />
∂x<br />
∂y<br />
∂z<br />
v ∂t<br />
v ∂t<br />
Laplace Operator :<br />
2<br />
∂<br />
Δ = 2<br />
∂x<br />
2<br />
∂<br />
+ 2<br />
∂y<br />
2<br />
∂<br />
+ 2<br />
∂z<br />
Phasengeschwindigkeit :<br />
ω λ<br />
vPhase = = ν ⋅λ<br />
=<br />
k T<br />
Gruppengeschwindigkeit :<br />
∂v<br />
Phase<br />
v Gruppe = vPhase<br />
− λ⋅ ∂λ<br />
k-Vektor :<br />
⋅π<br />
=<br />
λ<br />
2<br />
k<br />
<strong>Wellen</strong>funktion - ebene Welle : f ( x,<br />
t)<br />
= A ⋅sin(<br />
ω ⋅t<br />
− k ⋅ x)<br />
(Ausbreitung in pos. x-Richtung)<br />
f ( x,<br />
t)<br />
= A ⋅sin(<br />
ω ⋅t<br />
+ k ⋅ x)<br />
(Ausbreitung in neg. x-Richtung)<br />
f ( r, t)<br />
= A ⋅sin(<br />
ω ⋅t<br />
+ k ⋅r)<br />
(Ausbreitung in beliebige Richtung)<br />
f ( x,<br />
t)<br />
= A ⋅e<br />
i⋅(<br />
ω⋅t±<br />
k⋅<br />
x)<br />
<strong>Wellen</strong>funktion – Kugelwelle :<br />
A<br />
A<br />
ξ ( r,<br />
t)<br />
= ⋅sin(<br />
ω⋅t<br />
− k ⋅r<br />
) = ⋅e<br />
r<br />
r<br />
Übertragene Leistung :<br />
1 2 2<br />
P<br />
= ⋅ μ⋅ω ⋅ A ⋅ν<br />
2<br />
0<br />
0<br />
F<br />
(komplexe Darstellung)<br />
i⋅(<br />
ω ⋅t−k⋅<br />
r)<br />
0<br />
⎠
Ausbreitungsgeschwindigkeit in verschiedenen Medien<br />
Longitudinal – fester Körper :<br />
Longitudinal – Flüssigkeiten :<br />
Transversal – fester Körper :<br />
Transversal – gespannte Saite :<br />
Schallwellen in Gasen :<br />
Energiedichte :<br />
Intensität :<br />
v Phase =<br />
v Phase =<br />
v Phase =<br />
v Phase =<br />
v Phase<br />
=<br />
W<br />
ΔV<br />
E<br />
ρ<br />
K<br />
ρ<br />
G<br />
ρ<br />
F<br />
μ<br />
K<br />
=<br />
ρ<br />
1<br />
2<br />
γ ⋅ R ⋅T<br />
M<br />
2<br />
σ = = ⋅ ρ ⋅ A ⋅<br />
1<br />
2<br />
ω<br />
2<br />
I = σ⋅ vPhase<br />
= ⋅v<br />
Phase ⋅ ρ ⋅ A ⋅<br />
Als Intensität oder Energieflussdichte einer Welle bezeichnet man die Energie, die pro Zeiteinheit<br />
durch eine zur Ausbreitungsrichtung der Welle senkrechte Flächeneinheit transportiert wird.<br />
Die Intensität I einer Welle ist proportional zum Quadrat der Amplitude A <strong>und</strong> der Frequenz ω der<br />
Welle.<br />
10.12 Stehende <strong>Wellen</strong><br />
ankommende Welle : ξ 1 = A ⋅cos(<br />
ω⋅t<br />
+ k ⋅ x)<br />
reflektierte Welle : ξ 2 = A ⋅cos(<br />
ω⋅t<br />
− k ⋅ x + ϕ)<br />
(ϕist mgl. Phasensprung)<br />
stehende Welle :<br />
⎛ ϕ⎞<br />
⎛ ϕ<br />
ξ = 2⋅<br />
A ⋅cos<br />
⋅<br />
⎞<br />
⎜k<br />
⋅ x − ⎟ cos⎜ω⋅<br />
t + ⎟<br />
⎝ 2 ⎠ ⎝ 2 ⎠<br />
Schwingungsknoten :<br />
1<br />
x = ⋅ [ ( 2 ⋅n<br />
+ 1)<br />
⋅π<br />
+ ϕ]<br />
4⋅<br />
π<br />
Schwingungsbäuche :<br />
( 2⋅ n + ϕ)<br />
⋅π<br />
x =<br />
2⋅<br />
k<br />
Transversalwellen :<br />
• Festes Ende : Phasensprung von 180°<br />
• Loses Ende : kein Phasensprung<br />
Longitudinalwellen :<br />
• Festes Ende : kein Phasensprung<br />
• Loses Ende : Phasensprung von 180°<br />
2<br />
ω<br />
2
Thermodynamik<br />
a) Festkörper & Flüssigkeiten :<br />
Längenänderung :<br />
l<br />
l<br />
T1<br />
T1<br />
= l<br />
− l<br />
0K<br />
T 2<br />
⋅<br />
( 1+<br />
α⋅T<br />
)<br />
lT<br />
1 ⋅α⋅<br />
ΔT<br />
=<br />
1+<br />
l ⋅α<br />
T1<br />
2<br />
Näherung:<br />
Δl<br />
= l<br />
0<br />
⋅α⋅<br />
ΔT<br />
VT1<br />
⋅γ<br />
⋅ΔT<br />
Volumenänderung : VT<br />
1 −VT 2 =<br />
Näherung:<br />
ΔV<br />
= V0<br />
⋅3α<br />
⋅ΔT<br />
1+<br />
V ⋅γ<br />
Dichteänderung :<br />
ρ<br />
res<br />
ρ0<br />
=<br />
1+<br />
γ ⋅ΔT<br />
Dulong-Petitsches Gesetz : = 3 ⋅ N ⋅k<br />
⋅T<br />
= 3⋅<br />
R<br />
b) Ideales Gas :<br />
CV A B<br />
Zustandsgleichung : ⋅ V = n ⋅ R ⋅T<br />
= n⋅<br />
N ⋅k<br />
⋅T<br />
= const.<br />
T1<br />
p A B<br />
Volumenänderung : V = V ° ( 1+<br />
γ ⋅T<br />
)<br />
bel.<br />
Temperatur 0 C<br />
x<br />
Druckänderung : p = p ° ⋅ (1+<br />
γ ⋅T<br />
)<br />
Wärmemenge : Q = c ⋅m<br />
⋅ ΔT<br />
1. Gay-Lussac-Gesetz :<br />
2. Gay-Lussac-Gesetz :<br />
Gasgemische :<br />
bel.<br />
Temperatur 0 C<br />
x<br />
V 1 T1<br />
V<br />
= oder = const.<br />
V<br />
2<br />
T<br />
2<br />
p 1 T1<br />
p<br />
= oder = const.<br />
p<br />
ρ<br />
2<br />
m<br />
T<br />
2<br />
m<br />
=<br />
V<br />
ges<br />
ges<br />
=<br />
T<br />
1<br />
T<br />
ρ1V<br />
1 + ρ2V2<br />
+ ...<br />
V + V + ...<br />
1<br />
Spezifische Molwärme : CP = CV<br />
+ R<br />
CV = ⋅ f ⋅ R<br />
2<br />
Adiabatenindex :<br />
C<br />
κ =<br />
C<br />
P<br />
V<br />
f + 2<br />
=<br />
f<br />
Zustandsänderung isochor Isobar Isotherm isotrop<br />
Bedingung ΔV = 0 Δp = 0 ΔT = 0 ΔQ = 0 = ΔS<br />
1. Hauptsatz Q = ΔU Q + W = ΔU Q + W = 0 Q + W = ΔU<br />
Beziehung<br />
zw. p, T, V<br />
T 1 p1<br />
=<br />
T2<br />
p2<br />
T 1 V1<br />
=<br />
T2<br />
V2<br />
p 1 V1<br />
=<br />
p2<br />
V2<br />
p1<br />
p2<br />
κ<br />
⎛V2<br />
⎞<br />
= ⎜<br />
⎟<br />
⎝ V1<br />
⎠<br />
Wärmeenergie Q = cv<br />
⋅m<br />
⋅ ΔT<br />
Q = c p ⋅ m ⋅ΔT<br />
V2<br />
Q = m ⋅ R ⋅T<br />
⋅ln<br />
V Q = 0<br />
Konstanten : Umrechnung:<br />
−23<br />
J<br />
k B = 1,<br />
38⋅10<br />
K<br />
J<br />
1 k cal = 4187<br />
K<br />
R<br />
J<br />
= 8<br />
, 31<br />
mol ⋅ K<br />
2<br />
1