1.5 Induktive Messverfahren
1.5 Induktive Messverfahren
1.5 Induktive Messverfahren

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
44 Messtechnik / Sensorik (MS1) 04-2122080<br />
<strong>1.5</strong> <strong>Induktive</strong> <strong>Messverfahren</strong><br />
<strong>1.5</strong>.1 Weglängenmessung<br />
Die meisten induktiven Wegaufnehmer arbeiten nach dem Prinzip der Differentialdrossel (induktive<br />
Halbbrücken). Sie basieren auf der Tatsache, dass sich die Induktivität einer Spule ändert, wenn die<br />
magnetische Permeabilität des Materials in der Spule variiert. Sie finden häufig Anwendung in<br />
verschmutzter Umgebung sowie für kleinere Weglängen von einem Millimeter bis zu einem halben<br />
Meter. Auch in taktilen Rauheitssensoren und Tastsystemen von Formprüfgeräten sind<br />
Differentialdrosseln eingebaut. Ihre Auflösung liegt zum Teil unter 10 nm (Rauheitssensor). Bei<br />
Präzisions-Formtastern kann die Linearitätsabweichung weniger als 1 nm betragen und ist somit nicht<br />
messbar.<br />
<strong>1.5</strong>.1.1 Aufbau<br />
Ein induktiver Wegaufnehmer besteht im Wesentlichen aus zwei miteinander verbundenen Spulen, die<br />
in einem Metallzylinder dicht und vibrationssicher eingegossen sind. Die Längsachse des<br />
Metallzylinders und die Bewegungsrichtung des Messobjekts müssen parallel zueinander verlaufen<br />
oder die Bewegung muss durch eine entsprechende Mechanik in eine zum Zylinder achsparallele<br />
Bewegung umgewandelt werden. Durch den Zylinder wird ein Stößel mit einem Kern geführt, der mit<br />
dem bewegten Körper möglichst starr verbunden ist.<br />
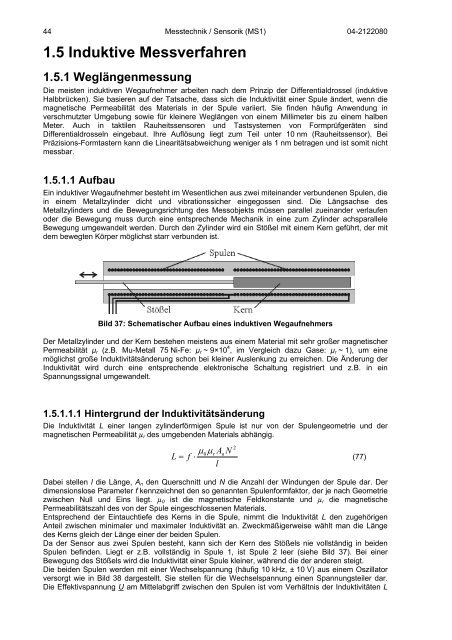
Bild 37: Schematischer Aufbau eines induktiven Wegaufnehmers<br />
Der Metallzylinder und der Kern bestehen meistens aus einem Material mit sehr großer magnetischer<br />
Permeabilität µr (z.B. Mu-Metall 75 Ni-Fe: µr ~ 9×10 4 , im Vergleich dazu Gase: µr ~ 1), um eine<br />
möglichst große Induktivitätsänderung schon bei kleiner Auslenkung zu erreichen. Die Änderung der<br />
Induktivität wird durch eine entsprechende elektronische Schaltung registriert und z.B. in ein<br />
Spannungssignal umgewandelt.<br />
<strong>1.5</strong>.1.1.1 Hintergrund der Induktivitätsänderung<br />
Die Induktivität L einer langen zylinderförmigen Spule ist nur von der Spulengeometrie und der<br />
magnetischen Permeabilität µr des umgebenden Materials abhängig.<br />
2<br />
µ r An<br />
N<br />
L = f ⋅ 0µ<br />
(77)<br />
l<br />
Dabei stellen l die Länge, An den Querschnitt und N die Anzahl der Windungen der Spule dar. Der<br />
dimensionslose Parameter f kennzeichnet den so genannten Spulenformfaktor, der je nach Geometrie<br />
zwischen Null und Eins liegt. µ0 ist die magnetische Feldkonstante und µr die magnetische<br />
Permeabilitätszahl des von der Spule eingeschlossenen Materials.<br />
Entsprechend der Eintauchtiefe des Kerns in die Spule, nimmt die Induktivität L den zugehörigen<br />
Anteil zwischen minimaler und maximaler Induktivität an. Zweckmäßigerweise wählt man die Länge<br />
des Kerns gleich der Länge einer der beiden Spulen.<br />
Da der Sensor aus zwei Spulen besteht, kann sich der Kern des Stößels nie vollständig in beiden<br />
Spulen befinden. Liegt er z.B. vollständig in Spule 1, ist Spule 2 leer (siehe Bild 37). Bei einer<br />
Bewegung des Stößels wird die Induktivität einer Spule kleiner, während die der anderen steigt.<br />
Die beiden Spulen werden mit einer Wechselspannung (häufig 10 kHz, ± 10 V) aus einem Oszillator<br />
versorgt wie in Bild 38 dargestellt. Sie stellen für die Wechselspannung einen Spannungsteiler dar.<br />
Die Effektivspannung U am Mittelabgriff zwischen den Spulen ist vom Verhältnis der Induktivitäten L
04-2122080 Messtechnik / Sensorik (MS1) 45<br />
der beiden Spulen abhängig, da für den komplexen Widerstand (Impedanz) Z einer realen Spule (mit<br />
dem ohmschen Innenwiderstand R) gilt<br />
Z ω<br />
2<br />
2<br />
= R + ( L)<br />
(78)<br />
Generell gilt für das Verhältnis zwischen den komplexen Größen Spannung U, Strom I und Impedanz<br />
Z das Ohmsche Gesetz:<br />
U = Z ⋅ I<br />
(79)<br />
Für eine Eingangsspannung UE ergibt sich demnach die folgende Effektivspannung U2 an Spule 2.<br />
Z<br />
2<br />
U 2 = U E ⋅<br />
(80)<br />
Z 1 + Z 2<br />
Den Betrag der Effektivspannung ermittelt ein Demodulator, der die Wechselspannung in eine<br />
Gleichspannung umwandelt. Somit wird die zu erfassende Bewegung des Stößels über<br />
Induktivitätsänderungen in eine variierende Spannung umgewandelt, die sich leicht messen lässt. Bei<br />
den heutigen Demodulatoren ist generell die Möglichkeit vorhanden, ihre Empfindlichkeit (in V/mm) zu<br />
variieren und den Nullpunkt der Ausgangsspannung auf eine bestimmte Position des Kerns zu<br />
justieren.<br />
Bild 38: Integration eines induktiven Wegaufnehmers in eine elektronische<br />
Wegmesseinrichtung<br />
<strong>1.5</strong>.1.1.2 Bauarten<br />
<strong>Induktive</strong> Aufnehmer werden heute für Wege bis zu 500 mm mit Auflösungen unter 100 µm<br />
angeboten. Bild 39 zeigt einige Beispiele. Für kleine maximale Messhübe (unter 1 mm) können<br />
induktive Tastsysteme Positionsänderungen von wenigen Nanometern detektieren.<br />
Neben den einfachen Sensoren werden auch solche mit Doppelstößel (zweiseitig ansteuerbar) oder<br />
solche mit Rückstellfeder (Taster) hergestellt. Die äußere geometrische Form (quadratisch,<br />
Winkelanschluss etc.) kann nahezu beliebig der Messanforderung angepasst werden, solange die<br />
Anordnung von Stößel und Spulen im Sensor unverändert bleibt.
46 Messtechnik / Sensorik (MS1) 04-2122080<br />
Bild 39: Darstellung einiger induktiver Wegaufnehmer [TWK, 1996]<br />
<strong>Induktive</strong> Wegaufnehmer weisen aufgrund ihres Aufbaus nur einen sehr geringen Verschleiß auf und<br />
sind auch (bei passender Ausführung) für extreme Messbedingungen geeignet, so dass sie häufig in<br />
industriellen Anwendungen eingesetzt werden.<br />
Der elektronische Demodulator, mit dem die Wechselspannung in ein Gleichspannungssignal (Betrag<br />
der Effektivspannung) umgewandelt wird (Bild 38), kann sich bei der Verwendung von abgeschirmten<br />
Kabeln bis zu 100 m vom Induktivaufnehmer entfernt befinden. Dies stellt einen weiteren Vorteil des<br />
Sensors bei der Verwendung unter rauhen Betriebsbedingungen dar.<br />
<strong>1.5</strong>.1.2 Ursachen von Messabweichungen<br />
Da die Spulen in den meisten Sensoren eingegossen sind, existieren nur wenige Fehlerquellen bei<br />
der Messung mit induktiven Wegaufnehmern.<br />
Die Temperaturdrift der angezeigten Weglänge liegt in der Größenordnung von 0,01%/°C, und auch<br />
die Abhängigkeit des Signals bei Schwankungen der Spannungsversorgung UE liegt bei heutigen<br />
Sensoren im Bereich von 0,1% bei ∆UE = 1 Volt.<br />
Schwerwiegender sind die Abweichungen, die sich durch die Applikation des Sensors am Messobjekt<br />
ergeben. Ein verbogener Stößel oder zu großes Spiel mechanischer Komponenten kann zu deutlich<br />
größeren Abweichungen führen als Temperatur- oder Versorgungsspannungsdrift. Speziell im<br />
Dauereinsatz muss bei Kugelköpfen u. ä. mechanischen Komponenten, die zur Umsetzung von<br />
Bewegungen dienen, darauf geachtet werden, dass das Spiel nicht zu groß wird.<br />
Literatur:<br />
[TWK, 1996] Katalog der Firma TWK-Elektronik GmbH Düsseldorf, 1996<br />
<strong>1.5</strong>.2 <strong>Induktive</strong> Näherungsschalter<br />
<strong>Induktive</strong> Näherungsschalter sind berührungslos arbeitende Positionsschalter, die auf die<br />
Anwesenheit eines Messobjekts im überwachten Bereich reagieren.<br />
Sie sind weitgehend unempfindlich gegenüber Umgebungseinflüssen und enthalten keine<br />
mechanischen Verschleißteile. Deshalb werden sie bevorzugt für Aufgaben eingesetzt, die eine hohe<br />
Lebensdauer, Schalthäufigkeit, Schaltgeschwindigkeit und Zuverlässigkeit erfordern.<br />
Aufgrund ihrer Unempfindlichkeit gegenüber Umgebungseinflüssen und ihrer einfachen<br />
Funktionsweise ist ihr Einsatz sehr wirtschaftlich und sie sind daher weit verbreitet. Eine<br />
Einschränkung in ihrer Verwendung ergibt sich nur aufgrund des induktiven Prinzips, das sie nur auf<br />
metallische Messobjekte ansprechen lässt.<br />
Die Schaltabstände der gängigen Näherungsschalter liegen zwischen wenigen Zehntel- und ca. 50<br />
Millimetern.<br />
<strong>1.5</strong>.2.1 Aufbau<br />
Ein induktiver Näherungsschalter besteht im Wesentlichen aus einer Spule, einem Ferritkern und<br />
angeschlossener Elektronik (siehe Bild 40). Diese Elemente sind wie beim induktiven<br />
Weglängenaufnehmer dicht und vibrationssicher in einem Metallgehäuse eingegossen.
04-2122080 Messtechnik / Sensorik (MS1) 47<br />
Bild 40: Schematische Darstellung eines induktiven Näherungsschalters<br />
Im Bild 41 sind verschiedene Bauformen von induktiven Näherungsschaltern dargestellt [Festo, 1999].<br />
<strong>1.5</strong>.2.1.1 Funktionsweise<br />
Die Elektronik erzeugt ein hochfrequentes Signal, das von der Spule in ein Magnetfeld gleicher<br />
Frequenz umgesetzt wird. Der elektronische Aufbau basiert auf einem bedämpften elektrischen<br />
Oszillator-Schaltkreis, welcher die Spule als ein Oszillatorelement enthält. Der Ferritkern ist so<br />
geformt, dass der größte Teil der Magnetfeldlinien in ihm geführt wird. Nur in Messrichtung ist der<br />
Kern offen, so dass die Magnetfeldlinien aus dem Gehäuse austreten können und vor dem<br />
Näherungsschalter ein Messfeld bilden (siehe Bild 40). Mit zunehmendem Abstand vom Schalter<br />
nimmt die Flussdichte des Magnetfelds immer mehr ab, so dass auch die Empfindlichkeit für ein<br />
Messobjekt immer kleiner wird.<br />
Befindet sich ein Messobjekt innerhalb des Schaltabstands, induziert das Magnetfeld Ströme im<br />
Messobjekt. Auswirkungen dieser Ströme werden von der Elektronik registriert und führen zur<br />
Änderung des Schaltzustands des Sensors (siehe Kapitel <strong>1.5</strong>.2.1.2).<br />
Bild 41: Darstellung einiger induktiver Näherungsschalter [Festo, 1999]<br />
<strong>1.5</strong>.2.1.2 Bauarten<br />
Es existieren verschiedene Bauarten induktiver Näherungsschalter, die sich weniger im mechanischen<br />
als im elektronischen Aufbau voneinander unterscheiden. Zwei dieser Bauarten werden hier<br />
beschrieben.
48 Messtechnik / Sensorik (MS1) 04-2122080<br />
Bei der ersten Bauart wird ein kontinuierlich wechselndes Magnetfeld mit der Spule erzeugt. Die<br />
Elektronik überwacht die Güte des Schwingkreises und dadurch die Impedanz der Spule, die sich bei<br />
der Annäherung eines metallischen Gegenstands ändert. Bei der anderen Bauart wird das Magnetfeld<br />
gepulst erzeugt [Contrinex, 2000]. Die im Messobjekt induzierten Wirbelströme erzeugen wiederum<br />
selbst ein Magnetfeld, dass dem vom Sensor erzeugten entgegengerichtet ist (Lenzsche Regel<br />
[Hering et al., 1989, Feynman, 1987]). Nach dem Ausschalten des Sensormagnetfelds brechen die<br />
induzierten Wirbelströme nicht sofort zusammen, so dass das entgegengesetzte Magnetfeld noch<br />
einen kurzen Moment länger existiert und beim Abklingen in der Spule des Sensors eine Spannung<br />
Uind induziert, die von der Elektronik registriert und ausgewertet wird. Die induzierte Spannung ist<br />
abhängig von der Querschnittsfläche der Spule An und der magnetischen Induktion B, die aus den<br />
Wirbelströmen resultiert.<br />
U<br />
ind<br />
⎛ dB<br />
dAn<br />
⎞<br />
= − N ⎜ An<br />
+ B⎟<br />
⎝ dt<br />
dt<br />
⎠<br />
<strong>1.5</strong>.2.2 Ursachen von Messabweichungen<br />
Da bei diesem Verfahren nur ein Schaltvorgang ausgelöst wird, wenn sich ein Messobjekt im<br />
überwachten Bereich befindet, führen variierende Umgebungsbedingungen nur selten zu<br />
Fehlschaltungen. Durch geeignete Wahl der Messumgebung (z.B. Abschirmung gegen andere<br />
hochfrequente Felder) lassen sich Fehlschaltungen sogar nahezu vollständig ausschließen.<br />
Literatur:<br />
[Festo, 1999] Katalog der Firma Festo, „<strong>Induktive</strong> Sensoren, Robust – sicher –<br />
fortschrittlich“, S. 2, 1999<br />
[Contrinex, 2000] Katalog der Firma Contrinex, „induktive Näherungsschalter –<br />
Hochleistungsprogramm“, 2000<br />
[Hering et al., 1989] Hering, Ekbert, Rolf Martin, Martin Stohrer, „Physik für Ingenieure“, VDI-<br />
Verlag, 3. Auflage, 1989<br />
[Feynman, 1987] Feynman, Richard P., „Vorlesungen über Physik“, Oldenbourg Verlag,<br />
München, 1987<br />
<strong>1.5</strong>.3 <strong>Induktive</strong> Drehzahlmessung (Wirbelstromtachometer)<br />
Neben rein mechanisch arbeitenden Drehzahlmessgeräten mit eingeschränkten Messbereichen ist<br />
das Wirbelstromtachometer ein einfaches und sehr gebräuchliches Drehzahlmessgerät. In der<br />
Vergangenheit wurde es zum Beispiel in Kraftfahrzeugen in großem Umfang verwendet. Heute setzen<br />
sich auch in diesem Bereich die digitalen <strong>Messverfahren</strong> immer mehr durch.<br />
<strong>1.5</strong>.3.1 Aufbau<br />
Bild 42 zeigt ein Beispiel für den Aufbau eines Wirbelstromtachometers. Die Welle, deren Drehzahl n<br />
gemessen werden soll, ist im Gehäuse 1 drehbar gelagert. Mit dieser Welle sind ein Dauermagnet 3<br />
und eine Eisenrückschlußglocke 2 fest verbunden. In den Luftspalt zwischen dem Dauermagneten 3<br />
und der Eisenrückschlußglocke 2 greift eine drehbar gelagerte, jedoch durch die Spiralfeder 5<br />
gefesselte Glocke 4 aus einem Buntmetall ein. Das vom Dauermagneten 3 erzeugte Magnetfeld wird<br />
über die Glocke 4 und die Eisenrückschlußglocke 2 geschlossen. Die Richtung dieses Magnetfeldes<br />
rotiert mit der Drehzahl n. In der Glocke 4 werden durch das rotierende Magnetfeld Wirbelströme<br />
erzeugt, die zu einem entgegengesetzten Magnetfeld führen (Lenzsche Regel [Hering et al., 1989,<br />
Feynman, 1987]). Zwischen beiden Magnetfeldern wirken, aufgrund der entgegengesetzten Richtung,<br />
anziehende Kräfte. Somit wirkt ein Drehmoment auf die Glocke, wodurch sie umso stärker aus ihrer<br />
Ruhelage ausgelenkt wird, je größer die Drehzahl n ist (siehe Bild 43). Hierbei stellt sich ein<br />
Gleichgewicht zwischen dem durch die Wirbelströme in der Glocke 4 erzeugten Drehmoment und dem<br />
entgegengesetzt gerichteten Drehmoment ein, das die Spiralfeder 5 entsprechend ihrer jeweiligen<br />
Verformung aufbringt. Der Zeiger 6 zeigt die Auslenkung der Glocke 4 und damit auf einer<br />
entsprechend kalibrierten Skala auch die Drehzahl n an.<br />
(81)
04-2122080 Messtechnik / Sensorik (MS1) 49<br />
Bild 42: Schematische Darstellung eines Wirbelstromtachometers: 1 Gehäuse, 2<br />
Eisenrückschlussglocke, 3 Dauermagnet, 4 Glocke aus Leichtmetall, 5 Spiralfeder,<br />
6 Zeiger<br />
Bild 43: Schematische Darstellung der Magnetfelder im Wirbelstromtachometer<br />
<strong>1.5</strong>.3.2 Ursachen von Messabweichungen<br />
Da es sich beim Wirbelstromtachometer um ein mechanisch arbeitendes Messgerät handelt, ist es<br />
verschleißanfälliger als die anderen beiden oben erwähnten induktiven Messgeräte.<br />
Die Anordnung von Spiralfeder und Zeiger stellt dabei den empfindlichsten Teil des Tachometers dar.<br />
Starke Vibrationen des Tachometers können zu Eigenschwingungen der Feder führen, was zu<br />
schwankenden Drehzahlanzeigen führt. Mechanische Belastung der Feder oder des Zeigers von<br />
außen führt meist zu einer systematischen Messabweichung.
50 Messtechnik / Sensorik (MS1) 04-2122080<br />
Starke elektromagnetische Felder führen ebenfalls zu einer Beeinflussung der Messwerte, da das<br />
Gleichgewicht zwischen den beiden Drehmomenten gestört wird, indem weitere Ströme in der Glocke<br />
induziert werden.<br />
Literatur:<br />
[Hering et al., 1989] Hering, Ekbert, Rolf Martin, Martin Stohrer, „Physik für Ingenieure“, VDI-<br />
Verlag, 3. Auflage, 1989<br />
[Feynman, 1987] Feynman, Richard P., „Vorlesungen über Physik“, Oldenbourg Verlag,<br />
München, 1987<br />
<strong>1.5</strong>.4 <strong>Induktive</strong>r Durchflusssensor<br />
Bei diesem Verfahren zur Messung von Strömungsgeschwindigkeiten wird durch die Wechselwirkung<br />
zwischen einer leitfähigen strömenden Flüssigkeit und einem Magnetfeld eine elektrische Spannung<br />
erzeugt. Diese liegt meist in der Größenordnung von einigen Millivolt und ist streng proportional zur<br />
Strömungsgeschwindigkeit des Mediums.<br />
Das Messprinzip lässt sich nur auf leitfähige Flüssigkeiten anwenden. Für Gase ist das Verfahren<br />
aufgrund der praktisch nicht vorhandenen Leitfähigkeit ungeeignet.<br />
<strong>1.5</strong>.4.1 Aufbau<br />
Ein induktiver Durchflusssensor besteht hauptsächlich aus einem Elektromagneten, zwei Elektroden<br />
und einem elektrisch isolierten Rohr (siehe Bild 44).<br />
Bild 44: Schematischer Aufbau eines induktiven Durchflussmessgeräts.<br />
Fließt eine Flüssigkeit durch das Rohr, so kann gemäß dem Faradayschen Induktionsgesetz an den<br />
zwei Elektroden, die diametral an der Wandung und senkrecht zur Fließrichtung und dem Magnetfeld<br />
B angeordnet sind, eine Spannung U abgegriffen werden. Diese Spannung ist für ein<br />
rotationssymmetrisches Strömungsprofil und ein homogenes Magnetfeld direkt proportional zur<br />
mittleren Strömungsgeschwindigkeit v (k: Proportionalitätsfaktor):<br />
U = k ⋅ B ⋅ D ⋅ v<br />
(82)<br />
Da sich der Durchfluss Q aus dem Rohrquerschnitt D und der mittleren Strömungsgeschwindigkeit v<br />
ableitet, gilt:<br />
2<br />
πD<br />
πD<br />
Q = ⋅ v = ⋅U<br />
(83)<br />
4 4kB<br />
Sowohl für laminare wie auch für turbulente Strömungen ergibt sich eine streng lineare Abhängigkeit<br />
der Nutzspannung U von der Strömungsgeschwindigkeit v .<br />
Das induktive Durchflussmessverfahren ist also in der Lage, direkt aus dem Durchfluss ein<br />
elektrisches Signal zur Weiterverarbeitung zu erzeugen. Bei anderen Durchflussmessverfahren erfasst<br />
der Messwertaufnehmer zunächst eine mechanische Größe (Differenzdruck, Drehzahl ...). Diese
04-2122080 Messtechnik / Sensorik (MS1) 51<br />
muss dann noch in ein elektrisches Signal umgewandelt werden, wodurch die Möglichkeiten für<br />
Messabweichungen vergrößert werden.<br />
Des Weiteren hat die induktive Durchflussmessung die folgenden Vorteile:<br />
- es gibt keine beweglichen und keine mechanischen Teile, die in das Rohr hineinragen. Dadurch<br />
wird der Druckverlust sehr klein gehalten und ist nicht größer als bei einer Rohrleitung gleicher<br />
Länge.<br />
- Das Rohrprofil wird durch die Messanordnung nicht unterbrochen und das Strömungsprofil wird<br />
deshalb nicht verändert.<br />
- Die Messung ist unabhängig von der Temperatur, der Viskosität, den Konzentrationen und dem<br />
Druck.<br />
- Auch chemisch aggressive Medien können gemessen werden, wenn das Rohr entsprechend<br />
ausgekleidet und ein passendes Elektrodenmaterial gewählt wird.<br />
- Die Strömungsrichtung ist unerheblich und das Verfahren ist auch für pulsierende Strömungen<br />
geeignet.<br />
- Der Messaufnehmer ist lageunabhängig.<br />
- Das Verfahren ist unempfindlich gegenüber mitgeführten Fremdkörpern. Durch eine zusätzliche<br />
Widerstandsmessung kann bei elektrisch nichtleitenden Feststoffen deren Gehalt in der<br />
Flüssigkeit ermittelt werden.<br />
<strong>1.5</strong>.4.2 Ursachen von Messabweichungen<br />
Die systematischen Abweichungen beim Betrieb eines induktiven Durchflussmessgeräts liegen in der<br />
Regel unter 0,5%. Das größte Problem ergibt sich aus den elektrochemischen Störgleichspannungen,<br />
die durch Reaktionen zwischen Elektrodenmaterial und Flüssigkeit entstehen. Dabei bilden die<br />
Elektroden mit der Flüssigkeit galvanische Zellen, deren Spannung von Temperatur, Durchfluss,<br />
Druck und chemischer Zusammensetzung der Flüssigkeit abhängen. Daher ist die Gleichspannung<br />
zwischen Elektrode und Flüssigkeit in der Praxis für jede Elektrode unterschiedlich. So entsteht eine<br />
Störgleichspannung, die das Messsignal überlagert. Durch geeignete Kompensationsschaltungen<br />
lassen sich diese Störsignale bei der elektronischen Signalaufbereitung jedoch weitestgehend<br />
unterdrücken.<br />
Ein weiteres Problem tritt auf, wenn der Elektromagnet mit reiner Wechselspannung betrieben wird.<br />
Es kommt dann zur Induktion von Störspannungen an den Elektroden, die jedoch ebenfalls durch<br />
geeignete Filter weitgehend unterdrückt werden können.<br />
Betreibt man den Elektromagneten mit einem geschalteten Gleichfeld, so treten die Störungen durch<br />
die induzierten Spannungen bei der Signalweiterverarbeitung nicht mehr auf. In diesem<br />
Betriebsmodus wird das elektrische Feld des Magneten erst dann umgeschaltet, wenn sich im<br />
Magneten ein homogenes, stabiles Magnetfeld gebildet hat und die induzierten<br />
Elektrodenspannungen in einem statischen Magnetfeld gemessen werden.