Übung: Reglerentwurf für ein Mehrgrößensystem In einem Walzwerk ...
Übung: Reglerentwurf für ein Mehrgrößensystem In einem Walzwerk ...
Übung: Reglerentwurf für ein Mehrgrößensystem In einem Walzwerk ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
FG Mess-, Steuerungs- und Regelungstechnik, FB Produktionstechnik, Universität Bremen WS 2000/2001<br />
Methoden der Prozessregelung, Dr.-<strong>In</strong>g. Ch. Ament Blatt 11-1<br />
<strong>Übung</strong>: <strong>Reglerentwurf</strong> <strong>für</strong> <strong>ein</strong> <strong>Mehrgrößensystem</strong><br />
<strong>In</strong> <strong>ein</strong>em <strong>Walzwerk</strong> wird das durchlaufende Arbeitsgut aufgrund unterschiedlicher<br />
Winkelgeschwindigkeiten zweier auf<strong>ein</strong>anderfolgender Walzen plastisch verformt.<br />
Antrieb 1 Antrieb 2<br />
ω 1, M A1<br />
Es werden zwei identische Antriebe mit fremderregten Gleichstrommaschinen verwendet.<br />
Das durch plastische Verformung entstehende Moment ML kann als proportional zur<br />
Differenz der Winkelgeschwindigkeiten ∆ω=ω2–ω1 > 0 angenommen werden. Es ergibt sich<br />
das folgende Strukturbild:<br />
u A1<br />
e A1<br />
_<br />
a) Implementieren Sie das Blockschaltbild in Simulink.<br />
Definieren Sie folgende numerische Konstanten in Matlab:<br />
RA = 0.5 Widerstand des Ankerkreises<br />
LA = 1 <strong>In</strong>duktivität des Ankerkreises<br />
c = 10 Produkt aus Maschinenkonstante und Hauptfluß<br />
J = 5 Trägheitsmoment des Antriebs<br />
ω 2, M A2<br />
Arbeitsgut<br />
iA1 MA1 M1 1 ω1 = y1 uA2 _<br />
1<br />
R A<br />
L A 1 +<br />
R<br />
s<br />
iA2 c<br />
MA2 M2 1<br />
s J<br />
ω2 = y2 e A2<br />
c<br />
1<br />
R<br />
L<br />
1 +<br />
R<br />
A<br />
c<br />
A<br />
A<br />
A<br />
s<br />
c<br />
K = 20 Proportionalitätskonstante zwischen Drehzahldifferenz und Lastmoment<br />
_<br />
M L<br />
s J<br />
K<br />
∆ω<br />
_
FG Mess-, Steuerungs- und Regelungstechnik, FB Produktionstechnik, Universität Bremen WS 2000/2001<br />
Methoden der Prozessregelung, Dr.-<strong>In</strong>g. Ch. Ament Blatt 11-2<br />
b) Bestimmen Sie <strong>ein</strong>e Zustandsraumdarstellung des Systems in Matlab.<br />
Dazu müssen im Simulink-Modell die System<strong>ein</strong>gänge mit den Kontakten "IN" und die<br />
Ausgänge mit den Kontakten "OUT" definiert werden. Verwenden Sie dann in Matlab den<br />
Befehl:<br />
[A,B,C,D] = linmod('Modellname')<br />
c) Wo liegen die Eigenwerte des Systems? Ist das System stabil?<br />
d) Ist das System steuerbar?<br />
e) Entwerfen Sie <strong>ein</strong>en Riccati-Regler. (Matlab-Befehl: K=riccati(A,B,Q,R) )<br />
f) Entwerfen Sie die Vorfiltermatrix.<br />
g) Implementieren Sie das geregelte System in Simulink und simulieren Sie<br />
Sollwertsprünge.<br />
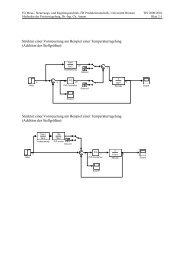
<strong>Übung</strong>: <strong>Reglerentwurf</strong> <strong>für</strong> <strong>ein</strong>es nichtlinearen Systems<br />
Die Temperatur in <strong>ein</strong>em chemischen Reaktor soll stabilisiert werden. Überschreitet die<br />
absolute Differenz zwischen Solltemperatur w und gemessener Temperatur r den Wert a,<br />
führt entweder <strong>ein</strong>e Heizung den konstanten Wärmestrom u = b zu oder <strong>ein</strong>e Kühlung führt<br />
den konstanten Wärmestrom i = –b ab. Der Wärmeaustausch mit der Umgebung werde nicht<br />
berücksichtigt; T1 und T2 seien Zeitkonstanten des Messfühlers.<br />
Es ergibt sich der folgende Regelkreis:<br />
w<br />
b<br />
e<br />
-a u K<br />
y<br />
a<br />
s<br />
_ -b<br />
a) Geben Sie den zugehörige nichtlinearen Standardregelkreis an.<br />
b) Können bleibende Regelabweichungen e ≠ 0 auftreten?<br />
c) Skizzieren Sie die lineare und die nichtlineare Ortskurve in der komplexe Ebene.<br />
Es sei T1 = 10, T2 = 2, K = 0.5, b = 4.<br />
r<br />
( 1<br />
1<br />
+ T s )( 1 + T<br />
d) Für welche Werte von a tritt nach der Methode der Harmonischen Balance <strong>ein</strong>e<br />
Dauerschwingung auf?<br />
e) Für a = 1.5 bestimme man die Amplitude A und die Kreisfrequenz ω der<br />
Dauerschwingung.<br />
1<br />
2<br />
s )
FG Mess-, Steuerungs- und Regelungstechnik, FB Produktionstechnik, Universität Bremen WS 2000/2001<br />
Methoden der Prozessregelung, Dr.-<strong>In</strong>g. Ch. Ament Blatt 11-3<br />
Lösung zur <strong>Übung</strong>saufgabe: <strong>Reglerentwurf</strong> <strong>für</strong> <strong>ein</strong> <strong>Mehrgrößensystem</strong><br />
Aufgabenteil a):<br />
• Das Simulink-Modell wie nachstehend gezeigt erstellt und unter 'walzwerk' gespeichert.<br />
• Die Konstanten müssen im Matlab-<strong>In</strong>terpreter definiert werden:<br />
Ra=0.5, La=1, c=10, J=5, k=20<br />
(kl<strong>ein</strong> "k" erspart Konflikte zur Reglermatrix "K"!)<br />
Aufgabenteil b):<br />
Das lineare Zustandsraummodell erhält man im Matlab-<strong>In</strong>terpreter durch:<br />
[A,B,C,D]=linmod('walzwerk')<br />
Es ist (die Reihenfolge der Zustände kann prinzipiell auch permutiert s<strong>ein</strong>!):<br />
A =<br />
-4.0000 4.0000 10.0000 0<br />
4.0000 -4.0000 0 10.0000<br />
-2.0000 0 -0.5000 0<br />
0 -2.0000 0 -0.5000<br />
B =<br />
C =<br />
D =<br />
0 0<br />
0 0<br />
1 0<br />
0 1<br />
0.2000 0 0 0<br />
0 0.2000 0 0<br />
0 0<br />
0 0
FG Mess-, Steuerungs- und Regelungstechnik, FB Produktionstechnik, Universität Bremen WS 2000/2001<br />
Methoden der Prozessregelung, Dr.-<strong>In</strong>g. Ch. Ament Blatt 11-4<br />
Aufgabenteil c):<br />
» eig(A)<br />
ans =<br />
-0.2500 + 4.4651i<br />
-0.2500 - 4.4651i<br />
-4.2500 + 2.4367i<br />
-4.2500 - 2.4367i<br />
Die Eigenwerte liegen also alle in der stabilen komplexen Halbebene, d.h. das ungeregelte<br />
System ist stabil. Dennoch ist <strong>ein</strong> <strong>Reglerentwurf</strong> sinnvoll, um dem System bessere<br />
dynamische Eigenschaften, z. B. bei Störungen, zu verleihen.<br />
Aufgabenteil d):<br />
Zuerst wird die Steuerbarkeitsmatrix Qr bestimmt. Der Rang von Qr ist 4; das entspricht der<br />
Systemordnung n=4 und das System ist also steuerbar.<br />
» Qr=ctrb(A,B)<br />
Qr =<br />
Columns 1 through 7<br />
0 0 10.0000 0 -45.0000 40.0000 142.5000<br />
0 0 0 10.0000 40.0000 -45.0000 -340.0000<br />
1.0000 0 -0.5000 0 -19.7500 0 99.8750<br />
0 1.0000 0 -0.5000 0 -19.7500 -80.0000<br />
Column 8<br />
-340.0000<br />
142.5000<br />
-80.0000<br />
99.8750<br />
» rank(Qr)<br />
ans =<br />
4<br />
Aufgabenteil e):<br />
Eine "Standardvorgabe" <strong>für</strong> die Gewichtungsmatrizen Q und R <strong>für</strong> den Riccati-Regler sind<br />
Einheitsmatrizen:<br />
» K=lqr(A,B,eye(4),eye(2))<br />
K =<br />
0.1082 0.1279 1.1843 0.7593<br />
0.1279 0.1082 0.7593 1.1843<br />
Aufgabenteil f):<br />
» S=-inv(C*inv(A-B*K)*B)<br />
S =<br />
12.3909 -1.2106<br />
-1.2106 12.3909
FG Mess-, Steuerungs- und Regelungstechnik, FB Produktionstechnik, Universität Bremen WS 2000/2001<br />
Methoden der Prozessregelung, Dr.-<strong>In</strong>g. Ch. Ament Blatt 11-5<br />
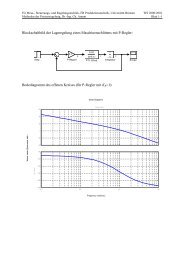
Aufgabenteil g):<br />
Das nachfolgend dargestellte Simulink-Blockschaltbild entspricht der allgem<strong>ein</strong>en Struktur<br />
der Zustandsraum-Darstellung (siehe Blatt 5-2):<br />
Für die erste Walze wird zu t=0 der<br />
Sollwert der Drehzahl auf w1=1<br />
gesetzt, <strong>für</strong> die zweite Walze wird zu<br />
t=10 der Sollwert auf w2=2 gesetzt.<br />
Nebenstehend das Bild des "Scope":<br />
Man erkennt das Einschwingen auf die<br />
vorgegebenen Sollwerte. Wird in t=10<br />
die zweite Walze <strong>ein</strong>geschaltet, hat<br />
dies auch <strong>ein</strong>e Rückwirkung auf die<br />
erste Walze.<br />
Zum Vergleich ist nebenstehend die<br />
Antwort <strong>für</strong> das ungeregelte System<br />
gezeigt. Dazu wird die Rückführung<br />
zu Null gesetzt:<br />
K=zeros(2,4)<br />
und das zugehörige Vorfilter S wie in<br />
f) neu berechnet.<br />
Im Vergleich bestätigt sich, dass der<br />
Regler das dynamische Verhalten des<br />
<strong>Mehrgrößensystem</strong>s deutlich<br />
verbessert.