

Dynamics and motion control - KTH
Dynamics and motion control - KTH
Dynamics and motion control - KTH

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Dynamics</strong> <strong>and</strong> <strong>motion</strong> <strong>control</strong><br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Lecture 1<br />
Course introduction <strong>and</strong> overview<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Bengt Eriksson, Jan Wik<strong>and</strong>er<br />
<strong>KTH</strong>, Department of Machine Design<br />
Division of Mechatronics<br />
e-mail: {benke, jan}@md.kth.se<br />
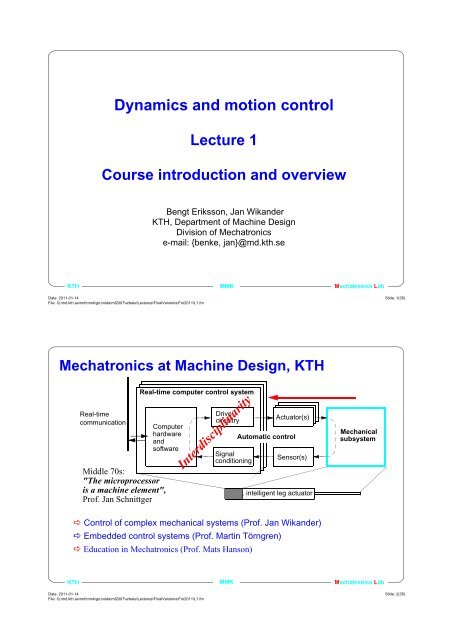
Mechatronics at Machine Design, <strong>KTH</strong><br />
Real-time<br />
communication<br />
Computer<br />
hardware<br />
<strong>and</strong><br />
software<br />
Middle 70s:<br />
"The microprocessor<br />
is a machine element",<br />
Prof. Jan Schnittger<br />
Real-time computer <strong>control</strong> system<br />
Drive<br />
circuitry<br />
� Control of complex mechanical systems (Prof. Jan Wik<strong>and</strong>er)<br />
� Embedded <strong>control</strong> systems (Prof. Martin Törngren)<br />
� Education in Mechatronics (Prof. Mats Hanson)<br />
<strong>KTH</strong> MMK<br />
Signal<br />
conditioning<br />
Interdisciplinarity<br />
Actuator(s)<br />
Actuator(s)<br />
Automatic <strong>control</strong><br />
Sensor(s)<br />
. intelligent leg actuator<br />
Mechatronics Lab<br />
Mechanical<br />
subsystem<br />
Mechatronics Lab<br />
Slide: 1(35)<br />
Slide: 2(35)
Motivation: multidisciplinarity is required!<br />
Mechanics<br />
development<br />
CAD<br />
<strong>Dynamics</strong><br />
FEM<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
1.1. Lecture outline<br />
• 1. Course goal<br />
Analysis <strong>and</strong> specifications<br />
Conceptual design, functions, technical implementation<br />
Control function Software- Electronics<br />
development development development<br />
Integration<br />
• 2. Course implementation<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Application<br />
software<br />
Supporting software<br />
Input/output drivers<br />
Hardware<br />
Network<br />
Mechatronics Lab<br />
• 3. Overview of <strong>and</strong> introduction to modelling <strong>and</strong> <strong>control</strong> of<br />
mechanical systems<br />
Mechatronics Lab<br />
Slide: 3(35)<br />
Slide: 4(35)
1.1.1 Overall course goal<br />
To provide an underst<strong>and</strong>ing <strong>and</strong> the skills of modelling <strong>and</strong><br />
design of <strong>motion</strong> <strong>control</strong> systems;<br />
"from modelling to implementation"<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
1.1.2 After the course you should be able to<br />
• Specify overall performance requirements for a <strong>motion</strong> <strong>control</strong> system<br />
• Derive models of typical mechatronic applications<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Mechatronics Lab<br />
• Find good parameters of dynamic models in both frequency <strong>and</strong> time domain<br />
• Design model based feedback <strong>and</strong> feed forward <strong>control</strong> both in continuous <strong>and</strong><br />
discrete time<br />
• Simulate process <strong>and</strong> <strong>control</strong> system models in both continuous <strong>and</strong> discrete time<br />
• Design <strong>and</strong> structure the <strong>control</strong>ler software for microprocessor implementation<br />
• Underst<strong>and</strong> the limitations <strong>and</strong> restrictions due to computing speed.<br />
Read more in the course PM<br />
Mechatronics Lab<br />
Slide: 5(35)<br />
Slide: 6(35)
1.1.3 Further course goals<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
1.2. Lecture outline<br />
• 1. Course goal<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Learning how your theoretical knowledge from earlier<br />
courses in math, mechanics,<br />
numeric methods <strong>and</strong> <strong>control</strong> should best be<br />
used to avoid chaos in real world experiments.<br />
• 2. Course implementation<br />
<strong>KTH</strong> MMK<br />
Mechatronics Lab<br />
• 3. Overview of <strong>and</strong> introduction to modelling <strong>and</strong> <strong>control</strong> of<br />
mechanical systems<br />
Mechatronics Lab<br />
Slide: 7(35)<br />
Slide: 8(35)
1.2.1 Prerequisites<br />
• Some mechanical <strong>and</strong> electrotechnical knowledge<br />
• Very litle programming knowledge<br />
• Good <strong>control</strong> knowledge it should corespond to the content of a basic<br />
course in <strong>control</strong> engineering<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
1.2.2 Course outline<br />
• 2 two hour lectures per week (except first week -> three)<br />
• Basic theory <strong>and</strong> calculated examples<br />
• 2 three hour per week lab working<br />
• Mainly computer simulation work, Matlab/Simulink<br />
• Woking with Exercises <strong>and</strong> Workshops<br />
• Assistance by<br />
Suleman Khan<br />
Ashan Qamar<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Mechatronics Lab<br />
Mechatronics Lab<br />
Slide: 9(35)<br />
Slide: 10(35)
1.2.3 Literature <strong>and</strong> course material<br />
� The course specification<br />
� The reading material<br />
� The lecture notes<br />
�St<strong>and</strong>ard book in <strong>control</strong><br />
� The exercises<br />
� The workshops<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
1.2.4 Examination<br />
• 1. Completed exercises<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
L2, modelling<br />
L3, feedback design in continuous time<br />
L4, feedback design in discrete time<br />
L5, Model following <strong>control</strong> -servo<br />
L6, Implementation on real-time HW<br />
L7, Robustness issues<br />
Mechatronics Lab<br />
• The exercises are completed by showing the results to an assistant in the lab.<br />
Exercises part 1, modeling of mechanical systems<br />
Exercises part 2, modeling of a DC motor system<br />
Exercises part 3, <strong>control</strong> of a DC motor system<br />
• 2. Written reports on the workshops, A <strong>and</strong> B.<br />
• 3. Written exam.<br />
Grading: A-F according to ECTS based on a weighted combination of the<br />
bullets 2 <strong>and</strong> 3 above.<br />
Mechatronics Lab<br />
Slide: 11(35)<br />
Slide: 12(35)
1.2.5 Exercises <strong>and</strong> laboratory facilities<br />
• Working in groups of preferably three people in each group<br />
• Where to work?<br />
- MMT computer rooms: Matlab/Simulink<br />
- Mechatronics-lab: ("FIM-labbet") Matlab/Simulink <strong>and</strong> experiments on real<br />
motor.<br />
- Wennström-lab: ("elektro-labbet") Matlab/Simulink<br />
- Your own computers, <strong>KTH</strong> CD’n with Matlab/Simulink<br />
• Mechatronics-lab: "passerkort": need card numbers<br />
• The labs are free to use 7/24 if they not are booked for other courses, booking<br />
schedule is available from course home page.<br />
• The course material <strong>and</strong> course web: www.md.kth.se/mmk/gru/mda/MF2007/<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
1.2.6 Additional useful material<br />
• The course builds upon earlier courses!<br />
- math, mechanics, machine elements, numerical methods, <strong>control</strong><br />
engineering,<br />
computer science <strong>and</strong> programming, electrical engineering<br />
• General textbooks in<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Mechatronics Lab<br />
• Control engineering -from a first course in automatic <strong>control</strong>. e.g. Glad och Ljung:<br />
Reglerteknik - Grundlägg<strong>and</strong>e teori<br />
• Electric circuit theory -from a first course in electric circuits. e.g. Hans Johansson<br />
Elektroteknik<br />
• Mechanical enginering. -from a course in dynamics. e.g. ------<br />
Mechatronics Lab<br />
Slide: 13(35)<br />
Slide: 14(35)
1.2.7 File system, AFS<br />
• Disk space for each person is given by kth.se<br />
Path: \afs\kth.se\home\"first letter in account"\"second letter in account"\"account<br />
name"\<br />
• Log in with Kerbrose using your kth.se account <strong>and</strong> password.<br />
• Map your home account path to the computer using AFS Client<br />
(could have changed from last year)<br />
• The main advantage is that you can work with your own applications<br />
on any computer where Kerbrose <strong>and</strong> the AFS client are installed as if<br />
they were on the local disc. No need for copying files.<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
1.2.8 Learning philosophy<br />
• It is about your learning - for which You is the boss!<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Mechatronics Lab<br />
• We employ feed forward <strong>and</strong> feedback to improve the learning process<br />
• Feed forward concepts: material, lectures, the project etc.<br />
• Feedback mechanisms<br />
1) Participant representatives: to collect important feedback info<br />
2) Lecture <strong>and</strong> workshop follow up questions<br />
3) H<strong>and</strong> ins of project parts<br />
4) Course evaluation in the end<br />
<strong>KTH</strong> MMK<br />
Mechatronics Lab<br />
Slide: 15(35)<br />
Slide: 16(35)
1.3. Lecture outline<br />
• 1. Course goal<br />
• 2. Course implementation<br />
• 3. Overview of <strong>and</strong> introduction to <strong>control</strong> of mechanical<br />
systems<br />
<strong>and</strong> a brief introduction to tools<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
1.3.1 Forecasts!<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Mechatronics Lab<br />
• "I think there is a world market for about five computers", Tomas J Watson Sr,<br />
IBM 1943<br />
• "There are no reasons for any individuals to have a computer in their home",<br />
Ken Olson, Digital Equipment 1977<br />
• "The current rate of progress cannot continue much longer", various computer<br />
technologists, 1950<br />
’Moore’s law’ (Intel, 1965):<br />
Microelectronics (MOS) performance is ~doubled every 18 months <strong>and</strong> chip<br />
size is reduced by 50%<br />
Intel 4004/1971 vs. Intel Pentium/1996: from 2300 to 5.5 million transistors<br />
One prediction for "2006: One chip with 200M transistors with 2GHZ frequency"<br />
Mechatronics Lab<br />
Slide: 17(35)<br />
Slide: 18(35)
1.3.2 Control technologies over time<br />
Mechanical, hydraulic <strong>and</strong><br />
pneumatic <strong>control</strong>lers<br />
(e.g. centrifugal regulator,<br />
18th century)<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Combustion engine<br />
19th century<br />
(Pneumatic <strong>control</strong>lers<br />
early 20th century)<br />
Electrical relays<br />
(Babbages analytical<br />
Analogue electronic <strong>control</strong>lers<br />
(1940-50)<br />
engine, ~1840) (transistor, 1947)<br />
Direct digital<br />
<strong>control</strong><br />
(early 1960:ies)<br />
Distributed<br />
computer <strong>control</strong><br />
(~1970:ies)<br />
(4004 microprocessor, 1971)<br />
1.3.3 Control development over time<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Mechatronics Lab<br />
• All mechanical <strong>control</strong>lers, e.g. the centrifugal governor (wind mills, steam engines,<br />
telephones), from 1700 <strong>and</strong> onwards.<br />
• Early theoretical results, e.g Routh, Hurwitz <strong>and</strong> Lyapunov on stability, late 1800’s.<br />
• Ziegler’s <strong>and</strong> Nichols’ method for tuning of PID <strong>control</strong>lers in 1942.<br />
• Computers in <strong>control</strong> from the mid 50’s.<br />
• New <strong>control</strong> design methods in the late 20th century: Optimal, Adaptive, Non-linear,<br />
Robust, Fuzzy, Neural, etc.<br />
• Still in use!<br />
- Mechanical <strong>control</strong>lers, e.g the flapper servo stage in hydraulic valves. Temperature<br />
<strong>control</strong> in shower taps.<br />
- Analog electronic <strong>control</strong>lers, e.g. for PID <strong>control</strong><br />
<strong>KTH</strong> MMK<br />
Mechatronics Lab<br />
Slide: 19(35)<br />
Slide: 20(35)
1.3.4 The paradigm shift<br />
Servo steering with<br />
mechanical backup<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Steer by wire<br />
1.3.5 What can be achieved?<br />
Hy-Wire from GM<br />
(autonomy 2)<br />
<strong>KTH</strong> MMK<br />
� More digital <strong>control</strong>!<br />
Mechatronics Lab<br />
Mechatronics Lab<br />
Slide: 21(35)<br />
Skateboard concept<br />
Fuel cell 94kW<br />
Integrated distributed <strong>control</strong><br />
Weight: 2 tons, Distance: 480km<br />
Slide: 22(35)
1.3.6 Why models? - active body <strong>control</strong><br />
• Many sensors<br />
• 4 actuators<br />
• Complex dynamics<br />
• Mechanical <strong>and</strong><br />
<strong>control</strong> design not<br />
separable<br />
• Simulation necessary<br />
sensors<br />
actuators<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
1.3.7 More than just feedback<br />
Trajectory<br />
planner<br />
Implemented on embedded<br />
<strong>control</strong> platform<br />
Mode logic<br />
Diagnostics<br />
Model following<br />
<strong>control</strong><br />
References<br />
Human machine<br />
interface<br />
Feedback<br />
<strong>control</strong><br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Observer<br />
Actuator<br />
Disturbance<br />
Controlled process<br />
Mechatronics Lab<br />
Mechatronics Lab<br />
Slide: 23(35)<br />
Output<br />
Sensors<br />
Slide: 24(35)
1.3.8 Example <strong>motion</strong> <strong>control</strong> applications<br />
• Industrial robot <strong>control</strong><br />
• Vehicular systems (suspension, brakes, engine <strong>control</strong>...)<br />
• Aircraft <strong>control</strong> <strong>and</strong> space applications<br />
• Axis <strong>control</strong> in various production machines<br />
• Hydraulic servo, e.g. in forest harvester or excavator<br />
• Master <strong>and</strong> slave <strong>control</strong> in teleoperated systems<br />
• Mobile robots/machines<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
1.3.9 The complete <strong>control</strong> design process<br />
• Design of the mechanical system<br />
Either prior to, or in conjunction with <strong>control</strong> design<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Mechatronics Lab<br />
• Modelling of the system <strong>and</strong> in some cases also modelling of the system’s<br />
interaction with the environment<br />
• Analysis of dynamic properties including simulation<br />
• Control requirement specifications<br />
• Control design including choice of related components such as sensors,<br />
<strong>control</strong> computer <strong>and</strong> sometimes actuator(s)<br />
• Simulation, verification <strong>and</strong> <strong>control</strong> prototyping<br />
• Real-time implementation<br />
<strong>KTH</strong> MMK<br />
Mechatronics Lab<br />
Slide: 25(35)<br />
Slide: 26(35)
1.3.10 Mechanical system modelling<br />
• Degrees of freedom - DOF: The number of inertia in a dynamic system<br />
that can move relative each other<br />
• The <strong>motion</strong> of each DOF is modelled by, , or = .<br />
Example:<br />
m 1<br />
k d y 2<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
F<br />
m 2<br />
∑<br />
mx ·· = Fy Jϕ ··<br />
1.3.11 Modelling <strong>and</strong> dynamic analysis<br />
of mechanical systems<br />
• Putting up the differential equations<br />
• Linearization<br />
y 1<br />
• Formulations:<br />
- State space; matrix equations<br />
- Input-output; transfer functions<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
∑<br />
M y<br />
Two DOFs coupled by a weak link.<br />
4:th order differential equation<br />
Mechatronics Lab<br />
• Different levels of simplification depending on purpose, e.g. simulation vs<br />
<strong>control</strong> design, feed forward vs feedback - model validation<br />
• Finding the parameters; system identification<br />
• Computer tools such as Maple <strong>and</strong> Matlab e.g. with the Identification toolbox<br />
Mechatronics Lab<br />
Slide: 27(35)<br />
Slide: 28(35)
.6<br />
.4<br />
.2<br />
1<br />
.8<br />
.6<br />
.4<br />
.2<br />
1.3.12 Different domains for different tasks<br />
yt () A<br />
i<br />
e λ – it = cos(<br />
ω<br />
i<br />
t + φ<br />
i<br />
)<br />
∑<br />
0<br />
0 5 10 15 20 25 30<br />
Time<br />
domain<br />
10 −1<br />
−40<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
1.3.13 Feedback <strong>control</strong><br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Gain dB<br />
Phase deg<br />
20<br />
0<br />
−20<br />
0<br />
−90<br />
−180<br />
10 −1<br />
Gs ( )<br />
Different <strong>control</strong>ler structures<br />
• PID <strong>control</strong>:<br />
=<br />
10 0<br />
Frequency (rad/sec)<br />
10 0<br />
Frequency (rad/sec)<br />
<strong>KTH</strong> MMK<br />
dx<br />
----- = fxu ( , ) y = h( x)<br />
dt<br />
2<br />
ω0 s 2<br />
----------------------------------------<br />
2<br />
+ 2ξω0 s + ω0 t<br />
d<br />
ut () = Kp ⋅ et () + KI ⋅ ∫es<br />
( ) ds+<br />
KD⋅ et ()<br />
dt<br />
0<br />
10 1<br />
10 1<br />
Frequency domain<br />
+<br />
+<br />
Im<br />
Complex plane<br />
Re<br />
Mechatronics Lab<br />
• Cascade <strong>control</strong>: inner loop viewed as an ideal servo by outer loop<br />
y ref<br />
Controller 2<br />
z ref<br />
Controller 1<br />
u<br />
G 1(s), e.g.<br />
actuator<br />
z<br />
Controlled<br />
system, G 2(s)<br />
y<br />
Mechatronics Lab<br />
Slide: 29(35)<br />
Slide: 30(35)
1.3.14 Feedback <strong>control</strong> properties<br />
The main principle in <strong>control</strong> engineering<br />
• Typically model based (but not required to be)<br />
• Produces <strong>control</strong> signals after an error has occurred<br />
• Disturbance rejection is achieved<br />
• Effect of process parameter variations is reduced<br />
• Leads to a closed loop<br />
• Sensor noise may be amplified <strong>and</strong> deteriorate performance<br />
• May lead to instability if designed incorrectly<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
1.3.15 Discrete time <strong>control</strong><br />
Digital <strong>control</strong> system<br />
Constant sampling frequency<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Mechatronics Lab<br />
y(tk) u(tk) u(t)<br />
Sampling Controller<br />
Actuation<br />
Continuous time y(t)<br />
process<br />
Synchronized actions<br />
Sampling interval h = t k - t k-1<br />
Sampling frequency f = 1/h<br />
Other tasks<br />
Antialiasing filter<br />
y, y(t k)<br />
e.g. communication <strong>and</strong><br />
diagnostics<br />
h<br />
Sensor<br />
Mechatronics Lab<br />
t<br />
Slide: 31(35)<br />
Slide: 32(35)
1.3.16 Brief introduction to tools<br />
• Modelling <strong>and</strong> simulation<br />
+ Matlab/Simulink<br />
+ Purpose: Modeling, analysis <strong>and</strong> design + model verification<br />
• Rapid <strong>control</strong> prototyping (RCP), 2 different systems<br />
dSPACE<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
- Power PC on PCI bus inside PC<br />
- I/O on the same PCI board<br />
- Programmed with Simulink<br />
- RTW, C-code generator<br />
- Microtec C cross compiler<br />
- 4 systems in lab<br />
- Host PC env. ControlDesk<br />
1.3.17 Modelling <strong>and</strong> simulation<br />
u Simulated<br />
process<br />
y<br />
Real process<br />
abstraction<br />
<strong>KTH</strong> MMK<br />
dx<br />
----- = fxu ( , ) y = h( x)<br />
dt<br />
Mechatronics Lab<br />
• Numerical solution: non real-time<br />
Mechatronics Lab<br />
Slide: 33(35)<br />
Integration solvers, e.g., runge kutta order<br />
2-5 using variable step size for<br />
efficient simulation time <strong>and</strong><br />
stable solution.<br />
Slide: 34(35)
1.3.18 Rapid <strong>control</strong> prototyping (RCP)<br />
Non real-time<br />
simulation<br />
Include I/O<br />
drivers<br />
Automatic<br />
C-code<br />
generation<br />
<strong>KTH</strong> MMK<br />
Date: 2011-01-14<br />
File: Q:\md.kth.se\md\mmk\gru\mda\mf2007\arbete\Lectures\FinalVersions\For2011\L1.fm<br />
Modelling<br />
<strong>and</strong> design<br />
Control implementation<br />
needs tools for<br />
quick iterations<br />
Evaluate <strong>and</strong><br />
redesign<br />
Instrumentation<br />
for tuning <strong>and</strong><br />
measurement<br />
Compile <strong>and</strong><br />
down load<br />
on RCP HW<br />
Mechatronics Lab<br />
Slide: 35(35)














