Ultrasonic Rangefinder Forward till Near - ROBOTC.net
Ultrasonic Rangefinder Forward till Near - ROBOTC.net
Ultrasonic Rangefinder Forward till Near - ROBOTC.net

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
9<br />
10<br />
11<br />
12<br />
13<br />
14<br />
15<br />
16<br />
17<br />
18<br />
19<br />
void moveStraight()<br />
{<br />
if(SensorValue[leftEncoder] > SensorValue[rightEncoder])<br />
{<br />
motor[port3] = 50;<br />
motor[port2] = 63;<br />
}<br />
if(SensorValue[leftEncoder] < SensorValue[rightEncoder])<br />
{<br />
motor[port3] = 63;<br />
motor[port2] = 50;<br />
}<br />
if(SensorValue[leftEncoder] == SensorValue[rightEncoder])<br />
{<br />
motor[port3] = 63;<br />
motor[port2] = 63;<br />
}<br />
}<br />
}<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
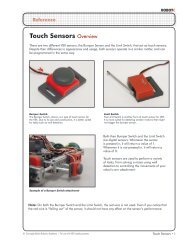
9i. Copy this code<br />
Select Edit > Copy to put the<br />
highlighted code on the clipboard.<br />
9j. Select File > Open and Compile<br />
<strong>ROBOTC</strong><br />
9g. Open MineArmStraight<br />
Instead of re-entering the movingstraight<br />
code, we’ll take a copy of<br />
it from the Encoders program.<br />
9h. Highlight code<br />
Find the void<br />
moveStraight()<br />
function and highlight it.<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 8