Ultrasonic Rangefinder Forward till Near - ROBOTC.net
Ultrasonic Rangefinder Forward till Near - ROBOTC.net
Ultrasonic Rangefinder Forward till Near - ROBOTC.net

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Sensing<br />
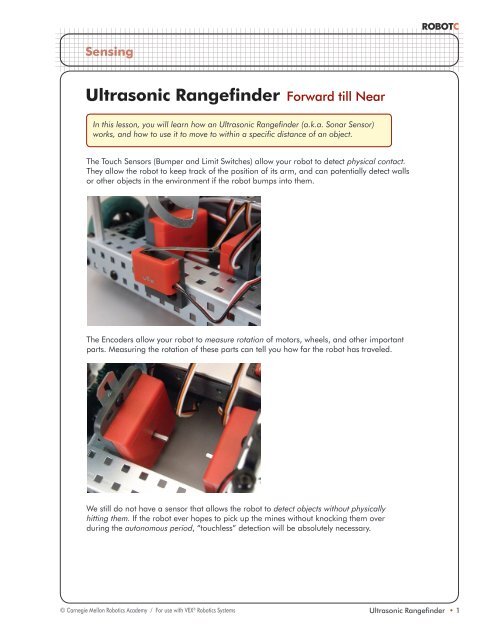
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong><br />
In this lesson, you will learn how an <strong>Ultrasonic</strong> <strong>Rangefinder</strong> (a.k.a. Sonar Sensor)<br />
works, and how to use it to move to within a specific distance of an object.<br />
The Touch Sensors (Bumper and Limit Switches) allow your robot to detect physical contact.<br />
They allow the robot to keep track of the position of its arm, and can potentially detect walls<br />
or other objects in the environment if the robot bumps into them.<br />
The Encoders allow your robot to measure rotation of motors, wheels, and other important<br />
parts. Measuring the rotation of these parts can tell you how far the robot has traveled.<br />
We s<strong>till</strong> do not have a sensor that allows the robot to detect objects without physically<br />
hitting them. If the robot ever hopes to pick up the mines without knocking them over<br />
during the autonomous period, “touchless” detection will be absolutely necessary.<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
<strong>ROBOTC</strong><br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 1
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
The <strong>Ultrasonic</strong> <strong>Rangefinder</strong> offers exactly this capability. Using the same physical principle<br />
as a bat or submarine’s sonar, the <strong>Ultrasonic</strong> <strong>Rangefinder</strong> measures distances using<br />
sound. It sends out a pulse of sound, then waits to hear the sound’s echo off of a solid<br />
object in the environment. By measuring how long it takes for the sound to bounce back,<br />
the sensor can calculate the distance that the sound must have traveled, and hence, how<br />
far away the object was that reflected it back.<br />
The <strong>Ultrasonic</strong> <strong>Rangefinder</strong> will work in a very similar way to the Encoder program you<br />
wrote in the previous section, but instead of measuring the distance that the wheel has<br />
turned, it will use the <strong>Ultrasonic</strong> <strong>Rangefinder</strong> to measure the distance to the nearest object<br />
in front of the arm.<br />
1. Add an <strong>Ultrasonic</strong> <strong>Rangefinder</strong> to the front of the robot’s arm. The design shown below<br />
will be used as the reference for the remainder of the unit. If you choose to use a<br />
design that differs significantly from this one, you may need to adjust accordingly.<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
1a. Add the sensor<br />
Attach the <strong>Ultrasonic</strong><br />
<strong>Rangefinder</strong> to the front of<br />
the Squarebot 3.0 arm.<br />
<strong>ROBOTC</strong><br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 2
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
2. Create a new program.<br />
3. Save the new program as “<strong>Forward</strong><strong>Near</strong>”.<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
2. File > New<br />
Select File > New to<br />
create a new program.<br />
3a. File > Save As...<br />
Select File > Save As...<br />
to save your program<br />
under a new name.<br />
1b. Connect the OUTPUT cable<br />
Connect the OUTPUT cable of<br />
the <strong>Ultrasonic</strong> <strong>Rangefinder</strong> to<br />
INTERRUPT port 1.<br />
1c. Connect the INPUT cable<br />
Connect the INPUT cable of<br />
the <strong>Ultrasonic</strong> <strong>Rangefinder</strong> to<br />
ANALOG / DIGITAL port 5.<br />
3b. Renate program<br />
Give this program the name <strong>Forward</strong><strong>Near</strong>.<br />
3c. Save<br />
Click Save.<br />
4. Use the Motors and Sensors Setup Menu to configure the <strong>Ultrasonic</strong> <strong>Rangefinder</strong> on<br />
Analog Digital Port 5, and Interrupt 1.<br />
4a. Robot > Motors and Sensors Setup<br />
Select Robot > Motors and Sensors Setup to<br />
open up the configuration menu.<br />
<strong>ROBOTC</strong><br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 3
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
Checkpoint<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
4b. Select A/D Sensors 1-8<br />
<strong>ROBOTC</strong><br />
4c. Set the sensor Name to “sonarSensor”<br />
The <strong>Ultrasonic</strong> <strong>Rangefinder</strong> is indexed by<br />
the number of the Analog/Digital Port it is<br />
plugged into, so enter a name for the sensor<br />
under Analog/Digital Port in5.<br />
4d. Set the sensor Type to “SONAR”<br />
Set the type of the sensor to “SONAR”,<br />
another name for the <strong>Ultrasonic</strong><br />
<strong>Rangefinder</strong> (because it uses sonar<br />
sound waves to measure distance).<br />
4e. Configure the Second Port to “int1”<br />
When you select “SONAR” as<br />
the sensor Type, a column for the<br />
“second port” appears for this<br />
sensor. The second port is the other<br />
port that the sensor is plugged into,<br />
Interrupt 1 (int1).<br />
4f. Click OK<br />
Click OK to finish configuring<br />
the <strong>Ultrasonic</strong> <strong>Rangefinder</strong>.<br />
The <strong>Ultrasonic</strong> <strong>Rangefinder</strong> is now set up and recognized by the program. It will now provide<br />
sensor readings as values through SensorValue[sonarSensor]. The values represent<br />
distances to the nearest detectable object (the first echo that the sensor hears), in inches. If an<br />
object is 6 inches away, in front of the sensor, SensorValue[sonarSensor] will be 6.<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 4
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
Let us first begin by reviewing the way a forward-for-distance Encoder behavior works,<br />
and then adapt it to use the <strong>Ultrasonic</strong> <strong>Rangefinder</strong> instead.<br />
The forward-for-distance command below was taken from the early parts of the<br />
Encoder lesson, and moves the robot forward until the Encoder accumulates more than<br />
5000 counts of rotation. It does so by using a while loop to repeat basic movement<br />
commands as long as the current count is s<strong>till</strong> below the desired target.<br />
while(SensorValue[leftEncoder] < 5000)<br />
{<br />
motor[port3] = 63;<br />
motor[port2] = 63;<br />
}<br />
In the case of the <strong>Ultrasonic</strong> <strong>Rangefinder</strong> moving until the robot is close to an object<br />
(such as the “stem” of a mine), we want the robot to move until the detected distance<br />
is below the target distance. Rephrased, the robot should keep running as long as the<br />
distance to the object is s<strong>till</strong> greater than the desired distance.<br />
5. Add task main and base code.<br />
Auto<br />
Auto<br />
1<br />
2<br />
3<br />
4<br />
5<br />
const tSensors sonarSensor = (tSensors) in5;<br />
task main()<br />
{<br />
wait1Msec(2000);<br />
bMotorReflected[port2] = 1;<br />
}<br />
6. Add the basic structure of a move-until behavior.<br />
Auto<br />
Auto<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
9<br />
10<br />
11<br />
const tSensors sonarSensor = (tSensors) in5;<br />
task main()<br />
{<br />
wait1Msec(2000);<br />
bMotorReflected[port2] = 1;<br />
while()<br />
{<br />
motor[port3] = 63;<br />
motor[port2] = 63;<br />
}<br />
}<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
5. Add this code<br />
Add task main, an initial delay, and<br />
the motor reflection command before<br />
proceeding with the rest of the program.<br />
6. Add this code<br />
The basic structure of the behavior<br />
is a while loop containing movingforward<br />
commands. The (condition)<br />
will determine how long this loop<br />
lasts, and is left blank for now.<br />
<strong>ROBOTC</strong><br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 5
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
7. Choose the (condition) based on the <strong>Ultrasonic</strong> <strong>Rangefinder</strong>. The (condition)<br />
should make the movement commands repeat as long as the distance to the<br />
target is s<strong>till</strong> above the desired value.<br />
Auto<br />
Auto<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
9<br />
10<br />
11<br />
const tSensors sonarSensor = (tSensors) in5;<br />
task main()<br />
{<br />
wait1Msec(2000);<br />
bMotorReflected[port2] = 1;<br />
while(SensorValue[sonarSensor] > 3)<br />
{<br />
motor[port3] = 63;<br />
motor[port2] = 63;<br />
}<br />
}<br />
8. Download and Run.<br />
Checkpoint<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
8. Go to Compile and Download Program<br />
7. Add this code<br />
The (condition) should be true as long<br />
as the <strong>Rangefinder</strong>’s value is above 3<br />
inches. This will make the robot move<br />
forward as long as the <strong>Rangefinder</strong> does<br />
not detect any objects within 3 inches.<br />
Your robot will run forward until it is within 3 inches of a detectable object. Not all objects are<br />
detectable, however, and the “area” of detection is only in front of the <strong>Ultrasonic</strong> <strong>Rangefinder</strong><br />
itself. These limitations are inherent to the technology, but the sensor does seem to be able to<br />
detect the mines, as we had hoped.<br />
<strong>ROBOTC</strong><br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 6
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
9. Upgrade this behavior to go straight while there is no obstacle nearby,<br />
rather than just run forward.<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
9a. Robot > Motors and Sensors Setup<br />
Select Robot > Motors and Sensors Setup<br />
to open up the configuration menu.<br />
9e. File > Save<br />
Select File > Save to<br />
save your program.<br />
9f. File > Open and Compile<br />
9d. Press OK<br />
Confirm the new<br />
sensor configuration.<br />
<strong>ROBOTC</strong><br />
9b. “Name” the sensors<br />
Assign the name “leftEncoder” to<br />
the sensor in port “in3” (A/D input<br />
3). Name the “in2” (A/D input 2)<br />
sensor “rightEncoder”.<br />
9c. Set the “Type” of both sensors<br />
Identify the sensor attached to both<br />
in2 and in3 as “Rotation” sensors<br />
(Encoders sense rotation).<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 7
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
9<br />
10<br />
11<br />
12<br />
13<br />
14<br />
15<br />
16<br />
17<br />
18<br />
19<br />
void moveStraight()<br />
{<br />
if(SensorValue[leftEncoder] > SensorValue[rightEncoder])<br />
{<br />
motor[port3] = 50;<br />
motor[port2] = 63;<br />
}<br />
if(SensorValue[leftEncoder] < SensorValue[rightEncoder])<br />
{<br />
motor[port3] = 63;<br />
motor[port2] = 50;<br />
}<br />
if(SensorValue[leftEncoder] == SensorValue[rightEncoder])<br />
{<br />
motor[port3] = 63;<br />
motor[port2] = 63;<br />
}<br />
}<br />
}<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
9i. Copy this code<br />
Select Edit > Copy to put the<br />
highlighted code on the clipboard.<br />
9j. Select File > Open and Compile<br />
<strong>ROBOTC</strong><br />
9g. Open MineArmStraight<br />
Instead of re-entering the movingstraight<br />
code, we’ll take a copy of<br />
it from the Encoders program.<br />
9h. Highlight code<br />
Find the void<br />
moveStraight()<br />
function and highlight it.<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 8
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
9k. Open <strong>Forward</strong><strong>Near</strong><br />
Return to the <strong>Forward</strong><br />
Till <strong>Near</strong> <strong>Ultrasonic</strong><br />
<strong>Rangefinder</strong> program.<br />
9l. Place cursor here<br />
Place your cursor between task<br />
main and the AUTO code.<br />
<strong>ROBOTC</strong><br />
9m. Paste<br />
The moving straight function is<br />
now declared, and available<br />
for use in this program.<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 9
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
Auto<br />
Auto<br />
Auto<br />
Auto<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
9<br />
10<br />
11<br />
12<br />
13<br />
14<br />
15<br />
16<br />
17<br />
18<br />
19<br />
20<br />
21<br />
22<br />
23<br />
24<br />
25<br />
26<br />
27<br />
28<br />
29<br />
30<br />
31<br />
32<br />
const tSensors rightEncoder = (tSensors) in2;<br />
const tSensors leftEncoder = (tSensors) in3;<br />
const tSensors sonarSensor = (tSensors) in5;<br />
void moveStraight()<br />
{<br />
if(SensorValue[leftEncoder] > SensorValue[rightEncoder])<br />
{<br />
motor[port3] = 50;<br />
motor[port2] = 63;<br />
}<br />
if(SensorValue[leftEncoder] < SensorValue[rightEncoder])<br />
{<br />
motor[port3] = 63;<br />
motor[port2] = 50;<br />
}<br />
if(SensorValue[leftEncoder] == SensorValue[rightEncoder])<br />
{<br />
motor[port3] = 63;<br />
motor[port2] = 63;<br />
}<br />
}<br />
task main()<br />
{<br />
wait1Msec(2000);<br />
bMotorReflected[port2] = 1;<br />
SensorValue[leftEncoder] = 0;<br />
SensorValue[rightEncoder] = 0;<br />
while(SensorValue[sonarSensor] > 3)<br />
{<br />
moveStraight();<br />
}<br />
}<br />
10. Download and Run.<br />
Checkpoint<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
10. Go to Compile and Download Program<br />
9n. Add this code<br />
Add these commands to<br />
reset the values of the<br />
encoders to 0.<br />
<strong>ROBOTC</strong><br />
9o. Modify this code<br />
Replace the generic motorforward<br />
commands with a<br />
call to moveStraight();.<br />
Your robot now runs straight until its <strong>Ultrasonic</strong> Sonar <strong>Rangefinder</strong> detects an object within<br />
3 inches, in its forward field of view. You can change the stopping distance by changing<br />
the 3 inch “cutoff” point.<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 10
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
This is the second sensor you have programmed to use a “cutoff” value. The Encoder program<br />
ran a movement behavior until the encoder count exceeded a certain value, and this new program<br />
runs a movement behavior until the <strong>Ultrasonic</strong> <strong>Rangefinder</strong> distance goes below a certain value.<br />
These “cutoff” values – called thresholds – are important in robot decision-making.<br />
Thresholds are values that set a cutoff point in a range of values, so that even though there<br />
are many possible values for encoder counts or distances, every one of them will fall either<br />
below the threshold or above it. This division of the many possible values into two distinct<br />
categories (above and below the threshold) allows the robot to make a definite decision<br />
about how to proceed for any value it may encounter.<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
threshold<br />
below above<br />
<strong>ROBOTC</strong><br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 11
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> values above the threshold of 3 inches made the program continue<br />
looping and moving forward. Values below the threshold caused the robot to stop. The threshold<br />
sets the point at which the robot’s behavior will change, because it marks the point at which the<br />
(condition) in the while loop (or if-statement) will change from true to false, or false to true, and<br />
thus change which lines of code will run.<br />
26<br />
27<br />
28<br />
29<br />
30<br />
31<br />
32<br />
SensorValue[rightEncoder] = 0;<br />
while(SensorValue[sonarSensor] > 3)<br />
{<br />
moveStraight();<br />
}<br />
}<br />
The robot is now set and ready to run for any object the <strong>Ultrasonic</strong> <strong>Rangefinder</strong> might see…<br />
but what happens when it doesn’t see anything at all? The sound waves have a limited range<br />
before the echo is too soft for the sensor to pick up. In addition, some materials or surfaces can<br />
actually deflect the sound waves away from the sensor, preventing it from hearing the echo.<br />
What happens then?<br />
11. Making sure that your robot is turned on and plugged in, open the <strong>ROBOTC</strong><br />
Debugger and Devices windows. Run the program.<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
11a. Robot > Debugger<br />
Go to Robot > Debugger to open<br />
the Program Debug window.<br />
11b. Robot > Debug Windows > Devices<br />
Open the Devices window so that you can<br />
monitor the <strong>Ultrasonic</strong> <strong>Rangefinder</strong> values.<br />
<strong>ROBOTC</strong><br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 12
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
11c. Pick up the robot<br />
Pick up the robot so that<br />
it doesn’t drive away.<br />
11d. Run the program<br />
12. Point your robot’s sensor away from any nearby objects, or toward a very soft object, like a<br />
sweater or cushion. Observe the value that the sensor gives through the <strong>ROBOTC</strong> debugger.<br />
12a. No Signal<br />
Orient your <strong>Ultrasonic</strong> <strong>Rangefinder</strong> so that it<br />
will have difficulty getting an echo back from<br />
whatever is in front of it. This may involve<br />
aiming it at something very far away or at<br />
something soft (which absorbs sound).<br />
<strong>ROBOTC</strong><br />
12b. Observe sensor value<br />
The sonarSensor will show<br />
a value of -1 if it is unable<br />
to measure distance for<br />
any reason.<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 13
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
13. Run your straight-<strong>till</strong>-near program in a place where the robot will get a “-1” sonar reading.<br />
Checkpoint<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
13a. Position the robot<br />
Place your robot so that it faces<br />
down a very long hallway, or<br />
toward a sound-absorbing object.<br />
13b. Run the robot<br />
Switch the robot off and back<br />
on to run the program.<br />
13c. Observe robot behavior<br />
The robot stops immediately, as<br />
if it were close to an object.<br />
Why would the robot act like it was close to an object when the exact opposite was true? The<br />
SensorValue of an <strong>Ultrasonic</strong> <strong>Rangefinder</strong> is returned as -1 when there is no object in range.<br />
Consider how your robot is making its decisions:<br />
while (SensorValue[sonarSensor] > 3)<br />
{<br />
moveStraight();<br />
}<br />
<strong>ROBOTC</strong><br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 14
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
The robot will move straight as long as the <strong>Ultrasonic</strong> <strong>Rangefinder</strong> detects an<br />
object farther than 3 inches away.<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
Object at 6 in<br />
SensorValue[sonarSensor] is 6, therefore<br />
SensorValue[sonarSensor] > 3 is true.<br />
The loop will continue looping.<br />
Object at 2 in<br />
SensorValue[sonarSensor] is 2, therefore<br />
SensorValue[sonarSensor] > 3 is false.<br />
The loop will end. The next portion of the<br />
program causes the robot to stop.<br />
No object<br />
SensorValue[sonarSensor] is -1, therefore<br />
SensorValue[sonarSensor] > 3 is false.<br />
The loop will end. The next portion of the program<br />
causes the robot to stop.<br />
<strong>ROBOTC</strong><br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 15
Sensing<br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> <strong>Forward</strong> <strong>till</strong> <strong>Near</strong> (cont.)<br />
14. Change the (condition) for continuing to move forward so that the robot will run while<br />
the object is detected farther than 3 in OR too far to detect.<br />
Auto<br />
Auto<br />
Auto<br />
Auto<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
9<br />
10<br />
11<br />
12<br />
13<br />
14<br />
15<br />
16<br />
17<br />
18<br />
19<br />
20<br />
21<br />
22<br />
23<br />
24<br />
25<br />
26<br />
27<br />
28<br />
29<br />
30<br />
31<br />
32<br />
End of Lesson<br />
const tSensors rightEncoder = (tSensors) in2;<br />
const tSensors leftEncoder = (tSensors) in3;<br />
const tSensors sonarSensor = (tSensors) in5;<br />
void moveStraight()<br />
{<br />
if(SensorValue[leftEncoder] > SensorValue[rightEncoder])<br />
{<br />
motor[port3] = 50;<br />
motor[port2] = 63;<br />
}<br />
if(SensorValue[leftEncoder] < SensorValue[rightEncoder])<br />
{<br />
motor[port3] = 63;<br />
motor[port2] = 50;<br />
}<br />
if(SensorValue[leftEncoder] == SensorValue[rightEncoder])<br />
{<br />
motor[port3] = 63;<br />
motor[port2] = 63;<br />
}<br />
}<br />
task main()<br />
{<br />
wait1Msec(2000);<br />
bMotorReflected[port2] = 1;<br />
SensorValue[leftEncoder] = 0;<br />
SensorValue[rightEncoder] = 0;<br />
while(SensorValue[sonarSensor] > 3 || SensorValue[sonarSensor] < 0)<br />
{<br />
moveStraight();<br />
}<br />
}<br />
The fine tuned code makes the robot move straight forward whenever it is far away from<br />
an object, even if it is so far away that it cannot detect it. You now have all of the tools<br />
you need to score additional points during the autonomous period of the Mine Removal<br />
Challenge. Now, use what you’ve learned to create your own final competition program!<br />
© Carnegie Mellon Robotics Academy / For use with VEX ® Robotics Systems<br />
14a. Modify this code<br />
Add a second part to the condition,<br />
using an OR (||) connector.<br />
<strong>ROBOTC</strong><br />
<strong>Ultrasonic</strong> <strong>Rangefinder</strong> • 16