Short description of device, technical data - PS Antriebstechnik
Short description of device, technical data - PS Antriebstechnik
Short description of device, technical data - PS Antriebstechnik

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Short</strong> <strong>description</strong> <strong>of</strong> <strong>device</strong>, <strong>technical</strong> <strong>data</strong><br />
The PMD 230-BL04 / 08 / 12 -4.0 is a 4-quadrant-transistor-controller to drive<br />
brushless dc-motors up to 1,6kW.<br />
Specifications <strong>of</strong> brushless de-motor:<br />
No maintenance required, because there are no carbon brushes<br />
Only wear are the ball bearings<br />
The speed-torque-relationship is that <strong>of</strong> a dc-motor:<br />
The nominal torque is available at all speeds. There is no slip! The control <strong>of</strong> the<br />
torque (e.g. coil drives) may simply be done by controlling the motor current. The<br />
motor current and the torque are proportional to each other.<br />
Optimum power is achieved from minimum motor size.<br />
Apposed to previous dc-motors there is no heat in the rotor. The heat is produced<br />
in the stator and is easily emitted. The rotor has no current. Irrespective <strong>of</strong> the<br />
motor speed (maximum torque with low or/at zero rpm), no ventilator is required.<br />
Motor speed or motor torque is fully adjustable. The actual speed is measured with a<br />
2 track encoder built into the motor. The encoders impulses can be used to control<br />
the positioning. If required a reference impulse is available. An “impulse preparation<br />
board” may be ordered optionally. This board supplies the encoder signals A, B, 0<br />
normal and: inverted in 5V (TTL) or 15V switchable. Further option “Impulse<br />
separator” is used to divide down the encoder impulses.<br />
The speed nominal value is set with an external voltage -10V...+10V or with a<br />
potentiometer (5kOhm). This can be lead with an optional Integrator (Type SI-012).<br />
Acceleration and deceleration ramps may be set separately (cw/ccw).<br />
If necessary, the maximum torque can be steplessly adjusted from zero to<br />
maximum by means <strong>of</strong> an external voltage. 0...+10V DC or an external<br />
potentiometer (5kOhm).<br />
The double nominal motor current can be programmed for accelerating and<br />
decelerating. When standing the maximum torque is available.<br />
The optional “ positioning control ” replaces a mechanical brake in many cases:<br />
The motor shaft is blocked to maximum torque by means <strong>of</strong> an external contact<br />
or the Input voltage.<br />
Optional: Malfunction relay.<br />
The controller switches <strong>of</strong>f and a potential free contact is opened when malfunction<br />
(e.g., overheating, short circuit, excessive braking or missing braking resistance)<br />
occurs.<br />
The motor can be switched <strong>of</strong>f free <strong>of</strong> current (control release) by means <strong>of</strong> opening<br />
an external contact (or NPN-switching transistor).<br />
2
Technical <strong>data</strong><br />
BL12/4Q/2 BL08/4Q/2 BL04/4Q/2<br />
mains voltage 230V +1-10%, 50Hz-60Hz, grounded network<br />
(apparent) power input 3,0 KVA 2,0 KVA 1,0 KVA<br />
nominal Output current<br />
12A 8A 4A<br />
(block-commutation)<br />
max. (mechanical) power output 1,6 KW 1,1kW 0,55kW<br />
peak current output 2-fold rated current (can be connected; declines at a time<br />
constant <strong>of</strong> approx. 1 sec. to rated current)<br />
Permissible ambient temperature + 45°C (with free air circulation)<br />
Max. installation altitude<br />
without loss <strong>of</strong> power<br />
1500 m<br />
Permissible vibration 0,5g (effective) 10...50 Hz<br />
cycle frequency 16 KHz<br />
Operating mode Four-quadrant mode; power recovery in DC voltage<br />
intermediate circuit (or to the braking resistor)<br />
Holding torque at standstill Full rated torque<br />
Built-in braking resistor With external Max. 34 W mean braking power max.<br />
braking resistor (100)<br />
Max. braking power = rated motor power<br />
Control terminals Potential-free<br />
Output 3-phase, short-circuit-pro<strong>of</strong>, for motors with EMC<br />
= 170 V (peak value)<br />
Set point input (not inverting)<br />
-10V...+10V<br />
Set point input (inverting)<br />
-10V...+10V<br />
Input for max. torque<br />
0V ...+10V<br />
available options - 2nd mains input for control voltage<br />
- Braking resistor 100 150W/430W/1000W<br />
- Set point Integration, type SI-012<br />
- Position controller: LR<br />
- Pulse conditioning: IA/2<br />
- Pulse divider: IT<br />
- Synchronous control SYN<br />
- Interbus S<br />
- Positioning module CPM<br />
- Positioning module CMP-A<br />
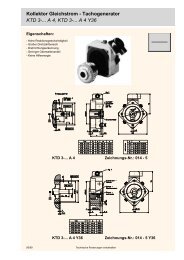
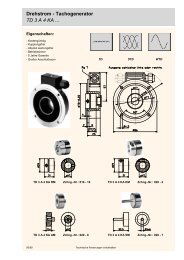
speed feedback Incremental encoder or tachogenerator<br />
run-up protection system<br />
Monitoring for faulty or incorrectly connected<br />
(can be disconnected)<br />
incremental encoder or tachogenerator<br />
Incremental encoder output RS422 compatible (5 V external power supply required<br />
Analogue measuring outputs For speed and current in four quadrants<br />
Motor temperature monitoring PTC Thermistor or contact (break contact element)<br />
Lines to the Motor Low-cost standard cables (shielded)<br />
Max. length 50 m<br />
Protection Class IP20<br />
MC behaviour (emission): Acc. to DIN EN 61800-3, Class B<br />
Preconditions: Wired by EMC-competent personnel<br />
MC behaviour<br />
Acc. to DIN EN 61800-3, industrial environment<br />
(interference immunity)<br />
Preconditions: Wired by EMC-competent personnel