Properties of Non-Linear Systems
Properties of Non-Linear Systems
Properties of Non-Linear Systems

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
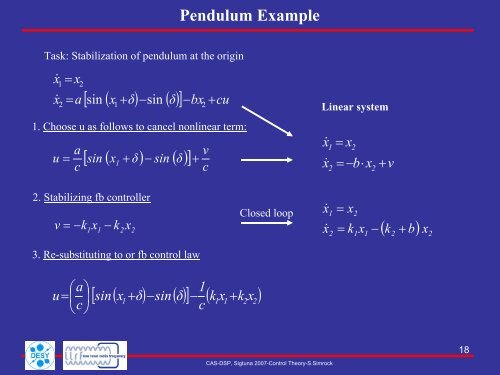
Task: Stabilization <strong>of</strong> pendulum at the origin<br />
x&<br />
1<br />
x&<br />
2<br />
= x<br />
2<br />
= a<br />
[ sin ( x + δ)<br />
−sin<br />
( δ)<br />
] −bx<br />
+ cu<br />
1. Choose u as follows to cancel nonlinear term:<br />
2. Stabilizing fb controller<br />
1<br />
a<br />
u =<br />
1 +<br />
c<br />
[ sin ( x + δ)<br />
− sin ( δ)<br />
]<br />
c<br />
3. Re-substituting to or fb control law<br />
⎛a⎞<br />
1<br />
u = ⎜ ⎟ 1<br />
1 1 +<br />
⎝c<br />
⎠<br />
c<br />
Pendulum Example<br />
[ sin ( x + δ)<br />
−sin<br />
( δ)<br />
] − ( k x k x )<br />
2<br />
v<br />
Closed loop<br />
2<br />
2<br />
CAS-DSP, Sigtuna 2007-Control Theory-S.Simrock<br />
<strong>Linear</strong> system<br />
x&<br />
1<br />
x&<br />
2<br />
= x<br />
2<br />
= −b⋅<br />
x<br />
1 2<br />
= −k1x1<br />
k2x<br />
2<br />
x&<br />
2 = k1x1<br />
− ( k2<br />
+ b)<br />
x2<br />
v −<br />
x&<br />
=<br />
x<br />
2<br />
+ v<br />
18