Properties of Non-Linear Systems
Properties of Non-Linear Systems
Properties of Non-Linear Systems

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
y<br />
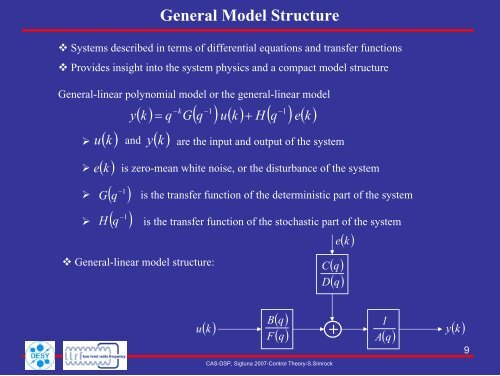
General Model Structure<br />
<strong>Systems</strong> described in terms <strong>of</strong> differential equations and transfer functions<br />
Provides insight into the system physics and a compact model structure<br />
General-linear polynomial model or the general-linear model<br />
u( k)<br />
and y(<br />
k)<br />
−k<br />
−1<br />
−1<br />
( k)<br />
= q G(<br />
q ) u(<br />
k)<br />
+ H ( q ) e(<br />
k)<br />
are the input and output <strong>of</strong> the system<br />
e<br />
( k)<br />
is zero-mean white noise, or the disturbance <strong>of</strong> the system<br />
( )<br />
( )<br />
−1<br />
G q is the transfer function <strong>of</strong> the deterministic part <strong>of</strong> the system<br />
<br />
−1<br />
H<br />
q is the transfer function <strong>of</strong> the stochastic part <strong>of</strong> the system<br />
e(<br />
k)<br />
General-linear model structure:<br />
C<br />
D<br />
B(<br />
q)<br />
1<br />
u ( k)<br />
F(<br />
q)<br />
+<br />
y(<br />
k)<br />
A(<br />
q)<br />
CAS-DSP, Sigtuna 2007-Control Theory-S.Simrock<br />
( q)<br />
( q)<br />
9