

download vol 5, no 3&4, year 2012 - IARIA Journals
download vol 5, no 3&4, year 2012 - IARIA Journals
download vol 5, no 3&4, year 2012 - IARIA Journals

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
International Journal on Advances in Telecommunications, <strong>vol</strong> 5 <strong>no</strong> 3 & 4, <strong>year</strong> <strong>2012</strong>, http://www.iariajournals.org/telecommunications/<br />
where<br />
2<br />
K<br />
i=1 k=1<br />
j ∈ Ω ⇔<br />
bi,k,spi,k<br />
<br />
<br />
j q(j − Bi,k) = jsq(j) (10)<br />
j1 ≤ C1 ∩<br />
2<br />
s=1<br />
js ≤ C2<br />
<br />
(11)<br />
The parameter s refers to the systems (s = 1 indicates the<br />
active system, s = 2 the passive system), while i refers to<br />
the states (i = 1 specifies the active state, i = 2 specifies the<br />
passive state). Also,<br />
<br />
bk, if s = i<br />
bi,k,s =<br />
(12)<br />
0, if s = i<br />
and Bi,k = (bi,k,1, bi,k,2) is the i,k row of the (2K×2) matrix<br />
B, with elements bi,k,s. Also, pi,k(j) is the utilization of the<br />
i-th system by service-class k:<br />
pi,k<br />
<br />
j =<br />
λk[1−lbk(j1−bk)]<br />
(1−vk)µ1k<br />
λkvk<br />
(1−vk)µ2k<br />
for i = 1<br />
for i = 2<br />
Moreover, js is the occupied capacity of the system:<br />
js =<br />
2<br />
K<br />
i=1 k=1<br />
n i kbi,k,s<br />
(13)<br />
(14)<br />
Proof: In order to derive the recursive formula of (10) we<br />
introduce the following <strong>no</strong>tation:<br />
n = (n 1 , n 2 ), n i = (n i 1, n i 2, ..., n i K ),<br />
n i k+ = (ni 1, ..., n i k + 1, ..., ni K ),<br />
n i k− = (ni 1, ..., n i k − 1, ..., ni K ),<br />
n 1 k+ = (n1 k+ , n2 ), n 2 k+ = (n1 , n 2 k+ ),<br />
n 1 k− = (n1 k− , n2 ), n 2 k− = (n1 , n 2 k− )<br />
(15)<br />
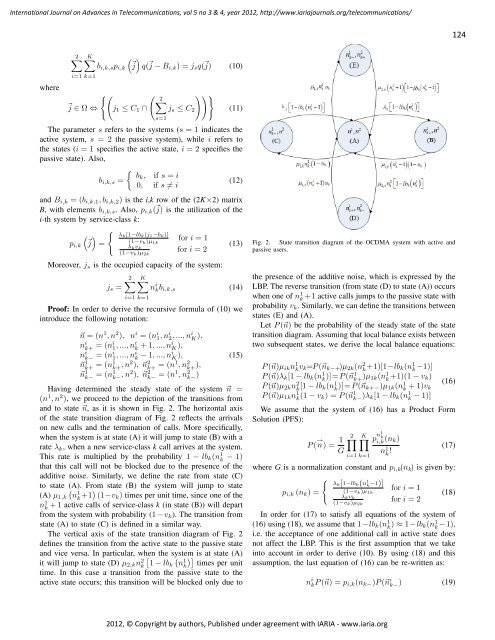
Having determined the steady state of the system n =<br />
(n 1 , n 2 ), we proceed to the depiction of the transitions from<br />
and to state n, as it is shown in Fig. 2. The horizontal axis<br />
of the state transition diagram of Fig. 2 reflects the arrivals<br />
on new calls and the termination of calls. More specifically,<br />
when the system is at state (A) it will jump to state (B) with a<br />
Fig. 2. State transition diagram of the OCDMA system with active and<br />
passive users.<br />
the presence of the additive <strong>no</strong>ise, which is expressed by the<br />
LBP. The reverse transition (from state (D) to state (A)) occurs<br />
when one of n1 k +1 active calls jumps to the passive state with<br />
probability vk. Similarly, we can define the transitions between<br />
states (E) and (A).<br />
Let P (n) be the probability of the steady state of the state<br />
transition diagram. Assuming that local balance exists between<br />
two subsequent states, we derive the local balance equations:<br />
P (n)µikn1 kvk=P (nk−+)µ2k(n 2 k +1)[1−lbk(n 1 k−1)] P (n)λk[1 − lbk(n1 k )]=P (n1 k+ )µ1k(n1 k +1)(1 − vk)<br />
P (n)µ2kn 2 k [1 − lbk(n1 k )]=P (nk+−)µ1k(n1 k + 1)vk<br />
P (n)µ1kn 1 k (1 − vk) = P (n 1 k− )λk[1 − lbk(n1 k − 1)]<br />
rate λk, when a new service-class k call arrives at the system.<br />
This rate is multiplied by the probability 1 − lbk(n1 k − 1)<br />
that this call will <strong>no</strong>t be blocked due to the presence of the<br />
additive <strong>no</strong>ise. Similarly, we define the rate from state (C)<br />
to state (A). From state (B) the system will jump to state<br />
1 (A) µ1,k nk +1 (1−vk) times per unit time, since one of the<br />
n1 k + 1 active calls of service-class k (in state (B)) will depart<br />
from the system with probability (1 − vk). The transition from<br />
state (A) to state (C) is defined in a similar way.<br />
The vertical axis of the state transition diagram of Fig. 2<br />
defines the transition from the active state to the passive state<br />
and vice versa. In particular, when the system is at state (A)<br />
it will jump to state (D) µ2,kn2 P (<br />
<br />
1<br />
k 1 − lbk nk times per unit<br />
time. In this case a transition from the passive state to the<br />
active state occurs; this transition will be blocked only due to<br />
⇀ n) = 1<br />
2 K p<br />
G<br />
i=1 k=1<br />
n1<br />
k<br />
i,k (nk)<br />
n1 k !<br />
(17)<br />
where G is a <strong>no</strong>rmalization constant and pi,k(nk) is given by:<br />
<br />
λk[1−lbk(n<br />
pi,k (nk) =<br />
1<br />
k−1)] for i = 1<br />
(1−vk)µ1k<br />
(18)<br />
λkvk for i = 2<br />
(1−vk)µ2k<br />
In order for (17) to satisfy all equations of the system of<br />
(16) using (18), we assume that 1−lbk(n 1 k ) ≈ 1−lbk(n 1 k −1),<br />
i.e. the acceptance of one additional call in active state does<br />
<strong>no</strong>t affect the LBP. This is the first assumption that we take<br />
into account in order to derive (10). By using (18) and this<br />
assumption, the last equation of (16) can be re-written as:<br />
n i kP (n) = pi,k(nk−)P (n i k−) (19)<br />
<strong>2012</strong>, © Copyright by authors, Published under agreement with <strong>IARIA</strong> - www.iaria.org<br />
(16)<br />
We assume that the system of (16) has a Product Form<br />
Solution (PFS):<br />
124




