

please click here - General Dynamics Global Imaging Technologies
please click here - General Dynamics Global Imaging Technologies
please click here - General Dynamics Global Imaging Technologies

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Pancake Resolvers >> Brush Type Motors >><br />
Brushless DC Motors<br />
1<br />
S1 0<br />
1<br />
S2 0<br />
on<br />
Q1 off<br />
+VS<br />
-VS<br />
CW Rotor Position - Electrical Degrees<br />
0 60 120 180 240 300 360<br />
(S1 ● S2)<br />
on<br />
Q2 off<br />
(S1 ● S2)<br />
on<br />
Q3 off<br />
(B)<br />
on<br />
Q4 off<br />
(S1 ● (S1<br />
S2)<br />
● S2)<br />
+<br />
0B 3-4 0<br />
-<br />
+<br />
0A 1-2 0<br />
-<br />
Q4<br />
Q2<br />
0A<br />
2<br />
with reference marks to which the position<br />
sensors can be aligned.<br />
1<br />
Q1<br />
3 4<br />
0B<br />
+VS -VS<br />
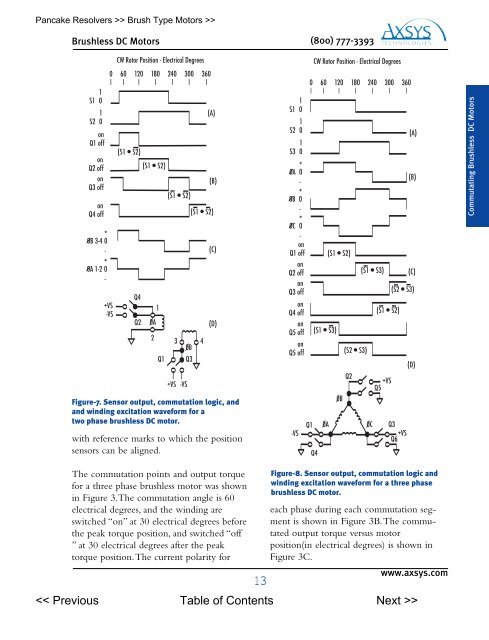
Figure-7. Sensor output, commutation logic, and<br />
and winding excitation waveform for a<br />
two phase brushless DC motor.<br />
The commutation points and output torque<br />
for a three phase brushless motor was shown<br />
in Figure 3.The commutation angle is 60<br />
electrical degrees, and the winding are<br />
switched “on” at 30 electrical degrees before<br />
the peak torque position, and switched “off<br />
” at 30 electrical degrees after the peak<br />
torque position.The current polarity for<br />
Q3<br />
(A)<br />
(C)<br />
(D)<br />
(800) 777-3393<br />
Figure-8. Sensor output, commutation logic and<br />
winding excitation waveform for a three phase<br />
brushless DC motor.<br />
each phase during each commutation segment<br />
is shown in Figure 3B.The commutated<br />
output torque versus motor<br />
position(in electrical degrees) is shown in<br />
Figure 3C.<br />
www.axsys.com<br />
><br />
Commutating Brushless DC Motors