

Solutions to Section 4.3 Homework Problems Problems 1-15 (odd ...
Solutions to Section 4.3 Homework Problems Problems 1-15 (odd ...
Solutions to Section 4.3 Homework Problems Problems 1-15 (odd ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Solutions</strong> <strong>to</strong> <strong>Section</strong> <strong>4.3</strong> <strong>Homework</strong> <strong>Problems</strong><br />
<strong>Problems</strong> 1-<strong>15</strong> (<strong>odd</strong>), 19, 21, 22, 23, 27, 33, 34, 37, and 38.<br />
S. F. Ellermeyer<br />
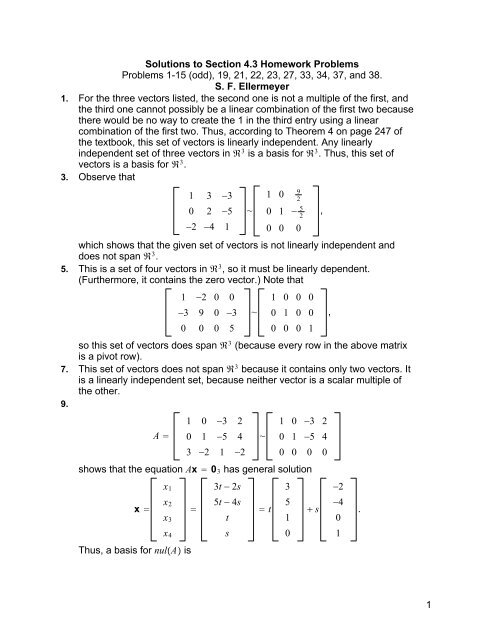
1. For the three vec<strong>to</strong>rs listed, the second one is not a multiple of the first, and<br />
the third one cannot possibly be a linear combination of the first two because<br />
there would be no way <strong>to</strong> create the 1 in the third entry using a linear<br />
combination of the first two. Thus, according <strong>to</strong> Theorem 4 on page 247 of<br />
the textbook, this set of vec<strong>to</strong>rs is linearly independent. Any linearly<br />
independent set of three vec<strong>to</strong>rs in 3 is a basis for 3 . Thus, this set of<br />
vec<strong>to</strong>rs is a basis for 3 .<br />
3. Observe that<br />
1 3 3<br />
0 2 5<br />
2 4 1<br />
~<br />
1 0 9<br />
2<br />
0 1 5<br />
2<br />
0 0 0<br />
which shows that the given set of vec<strong>to</strong>rs is not linearly independent and<br />
does not span 3 .<br />
5. This is a set of four vec<strong>to</strong>rs in 3 , so it must be linearly dependent.<br />
(Furthermore, it contains the zero vec<strong>to</strong>r.) Note that<br />
1 2 0 0<br />
3 9 0 3<br />
0 0 0 5<br />
~<br />
1 0 0 0<br />
0 1 0 0<br />
0 0 0 1<br />
so this set of vec<strong>to</strong>rs does span 3 (because every row in the above matrix<br />
is a pivot row).<br />
7. This set of vec<strong>to</strong>rs does not span 3 because it contains only two vec<strong>to</strong>rs. It<br />
is a linearly independent set, because neither vec<strong>to</strong>r is a scalar multiple of<br />
the other.<br />
9.<br />
A <br />
1 0 3 2<br />
0 1 5 4<br />
3 2 1 2<br />
~<br />
,<br />
1 0 3 2<br />
0 1 5 4<br />
0 0 0 0<br />
shows that the equation Ax 03 has general solution<br />
x <br />
x1<br />
x2<br />
x3<br />
x4<br />
Thus, a basis for nulA is<br />
<br />
3t 2s<br />
5t 4s<br />
t<br />
s<br />
t<br />
3<br />
5<br />
1<br />
0<br />
s<br />
,<br />
2<br />
4<br />
0<br />
1<br />
.<br />
1
3<br />
5<br />
1<br />
0<br />
,<br />
2<br />
4<br />
0<br />
1<br />
11. The equation x 2y z 0 can be written as<br />
The matrix<br />
1 2 1<br />
x<br />
y<br />
z<br />
A 1 2 1<br />
.<br />
0.<br />
has reduced row echelon form, and we see that the general solution of the<br />
above equation is<br />
x <br />
x<br />
y<br />
z<br />
Thus, a basis for nulA is<br />
13. Since<br />
a basis for nulA is<br />
<br />
A~<br />
2t s<br />
t<br />
s<br />
2<br />
1<br />
0<br />
6<br />
5<br />
2<br />
1<br />
0<br />
,<br />
t<br />
1<br />
0<br />
1<br />
1 0 6 5<br />
0 1 5<br />
2<br />
3<br />
2<br />
0 0 0 0<br />
,<br />
5<br />
3<br />
2<br />
0<br />
1<br />
The pivot columns of A form a basis for colA, so a basis for colA is<br />
2<br />
1<br />
0<br />
,<br />
.<br />
.<br />
s<br />
1<br />
0<br />
1<br />
.<br />
2
2<br />
2<br />
3<br />
<strong>15</strong>. The space spanned by the given set of five vec<strong>to</strong>rs is the column space of<br />
the matrix<br />
Since<br />
A <br />
A~<br />
,<br />
4<br />
6<br />
8<br />
1 0 3 1 2<br />
0 1 4 3 1<br />
3 2 1 8 6<br />
2 3 6 7 9<br />
1 0 3 0 4<br />
0 1 4 0 5<br />
0 0 0 1 2<br />
0 0 0 0 0<br />
and the pivot columns of A form a basis for colA, we see that a basis for<br />
colA is<br />
1<br />
0<br />
3<br />
2<br />
,<br />
19. Since v1 3v2 5v3, we see that Spanv1,v2,v3 Spanv2,v3. Also, the<br />
set v2,v3 is linearly independent because neither of these vec<strong>to</strong>rs is a<br />
scalar multiple of the other. Therefore, the set v2,v3 is a basis for<br />
H Spanv1,v2,v3.<br />
21.<br />
a. False. A set consisting of a single vec<strong>to</strong>r is in fact linearly<br />
independent, unless that vec<strong>to</strong>r is the zero vec<strong>to</strong>r, in which case the<br />
set is linearly dependent.<br />
b. False. It might be the case that the set b1,b2,,bp is linearly<br />
dependent (as in problem 19 above).<br />
c. True.<br />
d. False. A basis is a spanning set that is as small as possible.<br />
e. False. Elementary row operations do not change linear<br />
dependence relations that exist among the columns of a matrix.<br />
22.<br />
a. False. In order <strong>to</strong> be a basis for H, a set must both be linearly<br />
0<br />
1<br />
2<br />
3<br />
,<br />
1<br />
3<br />
8<br />
7<br />
.<br />
.<br />
.<br />
3
independent and span H.<br />
b. True.<br />
c. True.<br />
d. False.<br />
e. False. The pivot columns of A form a basis for colA.<br />
23. Any set of four vec<strong>to</strong>rs in 4 that spans 4 must also be linearly<br />
independent.<br />
27. A basis for the vec<strong>to</strong>r space described here is f,g where f is the function<br />
ft sint and gt cost.<br />
33. This set is linearly independent because neither function is a scalar multiple<br />
of the other.<br />
34. By inspection, we see that p1 p2 p3 z so the set p1,p2,p3 is linearly<br />
dependent. We can throw out p3 and still have a set that spans<br />
Spanp1,p2,p3. In other words, Spanp1,p2 Spanp1,p2,p3. Furthermore,<br />
the set p1,p2 is linearly independent. Therefore, the set p1,p2 is a basis<br />
for Spanp1,p2,p3.<br />
37. Suppose that<br />
c1t c2 sint c3 cos2t c4 sintcost 0 for all t .<br />
Since the above equation must hold for t 0, then<br />
c1 0 c2 sin0 c3 cos0 c4 sin0cos0 0,<br />
which means that<br />
c3 0.<br />
Since the above equation must hold for t , then<br />
c1 c2 sin c3 cos2 c4 sincos 0,<br />
which means that<br />
c1 c3 0,<br />
which, since we have already decided that c3 0, means that<br />
c1 0.<br />
Now, our equation has become<br />
c2 sint c4 sintcost 0 for all t .<br />
Since the above equation must hold for t /6 and t /3, then<br />
and<br />
which means that<br />
c2 sin 6<br />
c2 sin 3<br />
c4 sin 6<br />
c4 sin 3<br />
cos 6<br />
cos 3<br />
0<br />
0<br />
4
1<br />
2 c2 <br />
3<br />
2 c2 <br />
3<br />
4 c4 0<br />
3<br />
4 c4 0.<br />
The only solution of this system of equations is c2 c4 0.<br />
We have now shown that if<br />
c1t c2 sint c3 cos2t c4 sintcost 0 for all t ,<br />
then it must be the case that c1 c2 c3 c4 0. This shows that the set of<br />
functions f1,f2,f3,f4 defined by<br />
f1t t<br />
f2t sint<br />
f3t cos2t<br />
f4t sintcost<br />
is a linearly independent set of functions.<br />
5














