Nathan Delson's Portfolio - MAELabs UCSD
Nathan Delson's Portfolio - MAELabs UCSD
Nathan Delson's Portfolio - MAELabs UCSD

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Lead Designer/Researcher<br />
<strong>Nathan</strong> Delson’s <strong>Portfolio</strong><br />
ndelson@ucsd.edu<br />
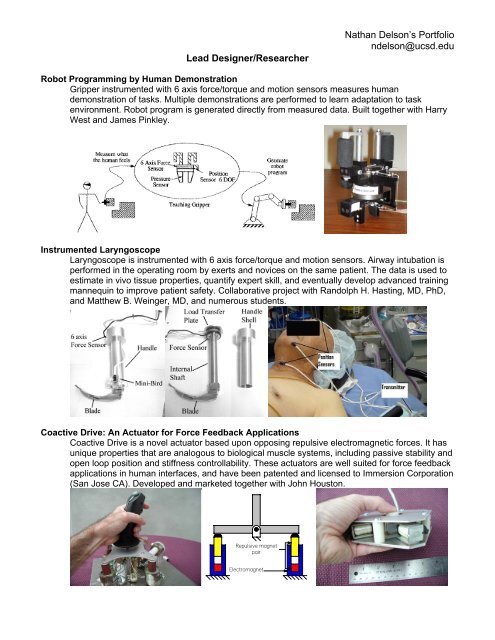
Robot Programming by Human Demonstration<br />
Gripper instrumented with 6 axis force/torque and motion sensors measures human<br />
demonstration of tasks. Multiple demonstrations are performed to learn adaptation to task<br />
environment. Robot program is generated directly from measured data. Built together with Harry<br />
West and James Pinkley.<br />
Instrumented Laryngoscope<br />
Laryngoscope is instrumented with 6 axis force/torque and motion sensors. Airway intubation is<br />
performed in the operating room by exerts and novices on the same patient. The data is used to<br />
estimate in vivo tissue properties, quantify expert skill, and eventually develop advanced training<br />
mannequin to improve patient safety. Collaborative project with Randolph H. Hasting, MD, PhD,<br />
and Matthew B. Weinger, MD, and numerous students.<br />
Coactive Drive: An Actuator for Force Feedback Applications<br />
Coactive Drive is a novel actuator based upon opposing repulsive electromagnetic forces. It has<br />
unique properties that are analogous to biological muscle systems, including passive stability and<br />
open loop position and stiffness controllability. These actuators are well suited for force feedback<br />
applications in human interfaces, and have been patented and licensed to Immersion Corporation<br />
(San Jose CA). Developed and marketed together with John Houston.<br />
Repulsive magnet<br />
pair<br />
Electromagnet
Lead Designer/Researcher (continued)<br />
<strong>Nathan</strong> Delson’s <strong>Portfolio</strong><br />
ndelson@ucsd.edu<br />
Robopogo: An Air Powered Hopping Robot<br />
Dynamic hopping robot that uses lightweight pneumatic actuators (air muscles). Under<br />
microprocessor control the robot recovers energy during each hop, similar to a person<br />
jumping on a trampoline. Applications include remote monitoring and entertainment.<br />
Collaborative project with Prof. Thomas Hanak and numerous students.<br />
gray bumper<br />
black bumper<br />
At impact Mid-Flight Max Height<br />
Head Over Heals Gait (under development)<br />
Sensor Lab: A Sensor Based System for High School Science Education<br />
Sensor system designed for high school science education. Simple interface with force and<br />
optical sensors allows for precise measurement of time. Developed with Andrezej Skoskiewicz<br />
and Koen De Witte.<br />
Wild-Blueberry Picker<br />
Novel approach to picking and transporting berries in uneven terrain.<br />
Built together with David Porat and Harry West at Design Continuum<br />
Improved Biopsy Needle for Fine Needle Aspiration<br />
Needle improves the ability of a doctor to gather a biopsy of a specimen.<br />
Built together with Dr. Mary L. Krinsky<br />
Pipette for in vitro Fertilization<br />
Device provides increase sensitive to allow for fine manipulation.
Twistmaster Jar Opener<br />
Advisor of Student Projects<br />
<strong>Nathan</strong> Delson’s <strong>Portfolio</strong><br />
ndelson@ucsd.edu<br />
Award Winner Collegiate Inventors Program, National Inventors Hall of Fame 1999<br />
Automated Jar Opening device for the elderly or children, sponsored by Black and Decker<br />
by Jennifer Davis, Marcus Malinosky, and Lee Colins<br />
Planing Hull Catamaran<br />
Award Winner Collegiate Inventors Program, National Inventors Hall of Fame 1999<br />
Sailboat that combines advantages of Catamaran and Sailboard for increased speed<br />
by Tobin Fisher (currently attending Stanford Product Design Program) & Marcus Malinosky<br />
Sociable Robotic Head Design<br />
First place in the ASME Western Regional Old Guard Oral Presentation Competition<br />
Nine degrees of freedom head is used for Cognitive Sciences research.<br />
By Gregory Burton, Karly Moore, Matt Niccolls, and Weixing Zhou (co-advised with Jerry<br />
Tustaniwskyj) (2003)
Mobile Cervical Spine Traction Device<br />
Advisor of Student Projects (continued)<br />
<strong>Nathan</strong> Delson’s <strong>Portfolio</strong><br />
ndelson@ucsd.edu<br />
Provides for cervical traction to be applied in a neck mounted device, allowing user to freely walk,<br />
sit, and move (patent pending). Sponsored by Ohana Medical Concepts. (2002)<br />
By, Jack Barry, Eric Bruce, Erik Tuzzio, and David Youmans (co-advised with Jerry Tustaniwskyj)<br />
Umbilical Cord Cutter<br />
Third place in the ASME Western Regional Old Guard Oral Presentation Competition<br />
Cord cutter for infants helps in difficult deliveries where umbilical cord may be rapped around<br />
neck. Cutter separates into two halves and provides valve to sample blood. (2001)<br />
by Aaron Burmeister, Jessica Lanzisera, and Devon Brown (co-advised with David Tribolet)<br />
In-Bottle Pill Dispenser<br />
Bottle insert dispenses one pill at a time, allowing users with tremors to easily take one pill at a<br />
time. By Charles Wachter. (1998)
Advisor of Student Projects (continued)<br />
<strong>Nathan</strong> Delson’s <strong>Portfolio</strong><br />
ndelson@ucsd.edu<br />
Wheelchair Mounted Door Opener<br />
Finalist in the Whitaker Foundation EMBS Student Design Competition,1996<br />
Device is attached by user to door handle. When wheelchair backs up, cable activated device<br />
twists knob and opens door. By Damian Campbell, Barbara Creary, and Greg Lund<br />
Redesign of Orthotic Splint<br />
Improved cable activated splint device customized for individual user to allow for visual display of<br />
gripping force and motor activation. By Geoffrey Klein.(1996)<br />
Course Web Pages<br />
MAE 3 Introduction to Engineering Graphics and Design.<br />
www.maelabs.ucsd.edu/mae3<br />
MAE156A Fundamental Principles Of Mechanical Design I:<br />
www.maelabs.ucsd.edu/mae156/mae156a_w04<br />
MAE156A Fundamental Principles Of Mechanical Design II:<br />
www.maelabs.ucsd.edu/mae156/student_projects.htm<br />
MAE150 Computer Aided Analysis and Design:<br />
www.maelabs.ucsd.edu/mae150<br />
Resources Page:<br />
www.maelabs.ucsd.edu