

SENT/SPC Driver for the MPC560xP and MPC564xL Microcontroller ...
SENT/SPC Driver for the MPC560xP and MPC564xL Microcontroller ...
SENT/SPC Driver for the MPC560xP and MPC564xL Microcontroller ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>SENT</strong>/<strong>SPC</strong> software driver <strong>for</strong> <strong>the</strong> <strong>MPC560xP</strong> <strong>and</strong> <strong>MPC564xL</strong><br />
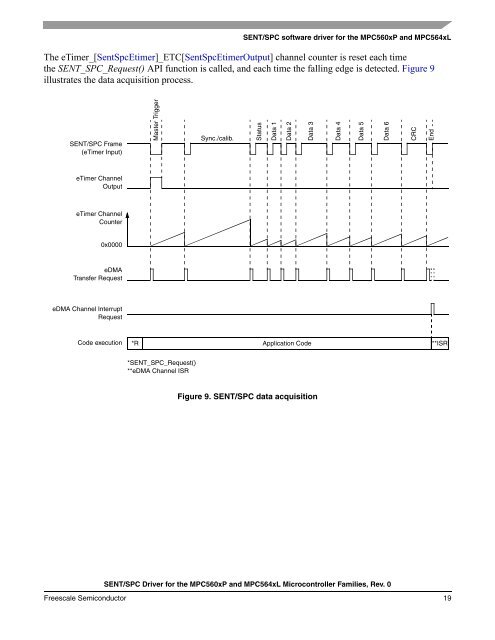
The eTimer_[SentSpcEtimer]_ETC[SentSpcEtimerOutput] channel counter is reset each time<br />
<strong>the</strong> <strong>SENT</strong>_<strong>SPC</strong>_Request() API function is called, <strong>and</strong> each time <strong>the</strong> falling edge is detected. Figure 9<br />
illustrates <strong>the</strong> data acquisition process.<br />
<strong>SENT</strong>/<strong>SPC</strong> Frame<br />
(eTimer Input)<br />
eTimer Channel<br />
Output<br />
eTimer Channel<br />
Counter<br />
0x0000<br />
eDMA<br />
Transfer Request<br />
eDMA Channel Interrupt<br />
Request<br />
Code execution<br />
*R<br />
Master Trigger<br />
*<strong>SENT</strong>_<strong>SPC</strong>_Request()<br />
**eDMA Channel ISR<br />
Sync./calib. Status<br />
Figure 9. <strong>SENT</strong>/<strong>SPC</strong> data acquisition<br />
<strong>SENT</strong>/<strong>SPC</strong> <strong>Driver</strong> <strong>for</strong> <strong>the</strong> <strong>MPC560xP</strong> <strong>and</strong> <strong>MPC564xL</strong> <strong>Microcontroller</strong> Families, Rev. 0<br />
Freescale Semiconductor 19<br />
Data 1<br />
Data 2<br />
Data 3<br />
Data 4<br />
Application Code **ISR<br />
Data 5<br />
Data 6<br />
CRC<br />
End













