

Master Thesis - Computer Graphics and Visualization - TU Delft
Master Thesis - Computer Graphics and Visualization - TU Delft
Master Thesis - Computer Graphics and Visualization - TU Delft

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
10.1 Performance Comparison<br />
124<br />
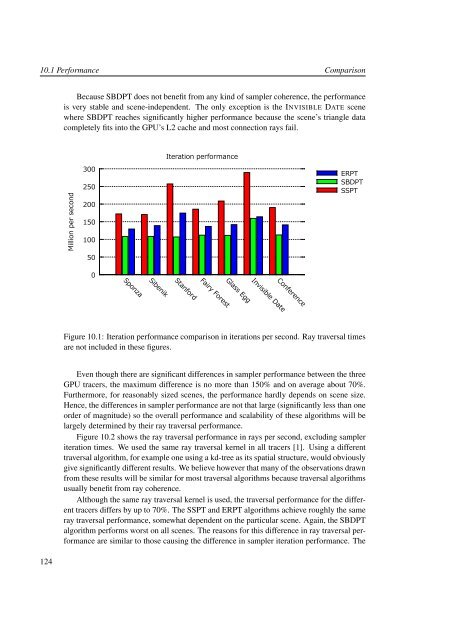
Because SBDPT does not benefit from any kind of sampler coherence, the performance<br />
is very stable <strong>and</strong> scene-independent. The only exception is the INVISIBLE DATE scene<br />
where SBDPT reaches significantly higher performance because the scene’s triangle data<br />
completely fits into the GPU’s L2 cache <strong>and</strong> most connection rays fail.<br />
Million per second<br />
300<br />
250<br />
200<br />
150<br />
100<br />
50<br />
0<br />
Sponza<br />
Sibenik<br />
Iteration performance<br />
Stanford<br />
Fairy Forest<br />
Glass Egg<br />
Invisible Date<br />
Conference<br />
ERPT<br />
SBDPT<br />
SSPT<br />
Figure 10.1: Iteration performance comparison in iterations per second. Ray traversal times<br />
are not included in these figures.<br />
Even though there are significant differences in sampler performance between the three<br />
GPU tracers, the maximum difference is no more than 150% <strong>and</strong> on average about 70%.<br />
Furthermore, for reasonably sized scenes, the performance hardly depends on scene size.<br />
Hence, the differences in sampler performance are not that large (significantly less than one<br />
order of magnitude) so the overall performance <strong>and</strong> scalability of these algorithms will be<br />
largely determined by their ray traversal performance.<br />
Figure 10.2 shows the ray traversal performance in rays per second, excluding sampler<br />
iteration times. We used the same ray traversal kernel in all tracers [1]. Using a different<br />
traversal algorithm, for example one using a kd-tree as its spatial structure, would obviously<br />
give significantly different results. We believe however that many of the observations drawn<br />
from these results will be similar for most traversal algorithms because traversal algorithms<br />
usually benefit from ray coherence.<br />
Although the same ray traversal kernel is used, the traversal performance for the different<br />
tracers differs by up to 70%. The SSPT <strong>and</strong> ERPT algorithms achieve roughly the same<br />
ray traversal performance, somewhat dependent on the particular scene. Again, the SBDPT<br />
algorithm performs worst on all scenes. The reasons for this difference in ray traversal performance<br />
are similar to those causing the difference in sampler iteration performance. The













