The UMIST-N Near-Wall Treatment Applied to Periodic Channel Flow
The UMIST-N Near-Wall Treatment Applied to Periodic Channel Flow
The UMIST-N Near-Wall Treatment Applied to Periodic Channel Flow

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>The</strong> <strong>UMIST</strong>-N <strong>Near</strong>-<strong>Wall</strong><br />
<strong>Treatment</strong> <strong>Applied</strong> <strong>to</strong> <strong>Periodic</strong><br />
<strong>Channel</strong> <strong>Flow</strong><br />
Submitted for the Degree of<br />
Master of Philosophy<br />
by<br />
Bryn Richards<br />
Department of Mechanical, Aerospace<br />
and Manufacturing Engineering<br />
University of Manchester<br />
Institute of Science and Technology<br />
2005
Declaration<br />
No portion of the work referred <strong>to</strong> in this thesis has been submitted in sup-<br />
port of an application for another degree or qualification of this or any other<br />
university or other institution of learning.<br />
i
Acknowledgements<br />
I would like <strong>to</strong> thank my supervisor, Dr. A. P. Watkins for his guidance<br />
throughout this project and for his willingness <strong>to</strong> be interrupted and <strong>to</strong> invest<br />
time with me whenever I have sought his attention. His style as a supervisor<br />
allows flexibility, independence, and self-actualisation. Our discussions have<br />
generated possibilities more than they have limited them.<br />
I would like <strong>to</strong> thank Professor Dominique Laurence for his involvement. He<br />
has continually made connections that have identified further sources of input<br />
in<strong>to</strong> the project and further applicability <strong>to</strong> the work of others.<br />
Dr. T. J. Craft has offered access <strong>to</strong> his unparalleled power of explanation<br />
and keen investigative ability whenever I have approached his open door.<br />
Dr. Simon Gant has offered patient and careful explanations on innumerable<br />
occasions. I greatly admire the enthusiasm, stewardship, and excellence that<br />
he brings <strong>to</strong> every facet of his professional life.<br />
Many others throughout the department have acted as sources of inspiration<br />
and support. I will continue <strong>to</strong> benefit from the diverse perspectives and<br />
experiences of the many interesting people whom I have had the good fortune<br />
<strong>to</strong> meet during my time at <strong>UMIST</strong>.<br />
I gratefully acknowledge the support of the DESIDER project in partially<br />
funding this research.<br />
ii
Abstract<br />
This thesis assesses the performance of the <strong>UMIST</strong>-N subgrid near-wall treat-<br />
ment when applied <strong>to</strong> periodic flow. <strong>The</strong> thesis also assesses the use of the<br />
k-ω turbulence model with the subgrid approach. Based on this work, the<br />
approach appears <strong>to</strong> be applicable <strong>to</strong> time-variant flow. Further research is<br />
required <strong>to</strong> improve the implementation of the k-ω model.<br />
<strong>UMIST</strong>-N solves simplified transport equations near a solid boundary at a<br />
lower computational cost than that of a low-Reynolds-number treatment.<br />
In applying the method <strong>to</strong> periodic channel flow, none of the approaches<br />
considered performed in an exemplary manner, but the subgrid exhibited no<br />
apparent failing when compared <strong>to</strong> the low-Reynolds-number results. It did<br />
offer an improvement upon the logarithmic law of the wall.<br />
This work highlights a numerical difficulty in applying the subgrid solution<br />
as a boundary layer <strong>to</strong> the main grid when the k-ω model is used. This has<br />
manifest itself in the results as an enhanced propensity <strong>to</strong>ward a discontinuity<br />
in calculated profiles at the subgrid / main grid interface under certain flow<br />
conditions.<br />
A range of steady channel flow data has been compiled and presented in this<br />
thesis. Empirical correlations are offered which identify general tendencies<br />
in the data and may provide a useful <strong>to</strong>ol for researchers engaged in the<br />
computation of flows.<br />
iii
Contents<br />
1 Introduction & Literature Survey 1<br />
1.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1<br />
1.2 Turbulence Models . . . . . . . . . . . . . . . . . . . . . . . . 5<br />
1.3 <strong>Wall</strong> Functions & the Subgrid Approach . . . . . . . . . . . . 7<br />
1.4 Relevance <strong>to</strong> Large Eddy Simulation . . . . . . . . . . . . . . 11<br />
1.5 <strong>Periodic</strong> <strong>Flow</strong> . . . . . . . . . . . . . . . . . . . . . . . . . . . 12<br />
1.6 Study Objectives . . . . . . . . . . . . . . . . . . . . . . . . . 14<br />
1.7 <strong>The</strong>sis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . 15<br />
2 Turbulence Models 17<br />
2.1 Reynolds Averaging . . . . . . . . . . . . . . . . . . . . . . . . 17<br />
2.2 <strong>The</strong> k-ε Model . . . . . . . . . . . . . . . . . . . . . . . . . . 21<br />
2.2.1 <strong>The</strong> Low-Reynolds-Number k-ε Model . . . . . . . . . 22<br />
2.2.2 Yap Correction . . . . . . . . . . . . . . . . . . . . . . 24<br />
2.3 <strong>The</strong> k-ω Model . . . . . . . . . . . . . . . . . . . . . . . . . . 25<br />
2.4 <strong>The</strong> Logarithmic Law of the <strong>Wall</strong> . . . . . . . . . . . . . . . . 26<br />
3 <strong>Channel</strong> <strong>Flow</strong> 31<br />
3.1 Governing Equations . . . . . . . . . . . . . . . . . . . . . . . 31<br />
3.1.1 <strong>The</strong> k-ε Model . . . . . . . . . . . . . . . . . . . . . . 33<br />
iv
3.1.2 <strong>The</strong> k-ω Model . . . . . . . . . . . . . . . . . . . . . . 34<br />
3.2 <strong>Flow</strong> Characterisation . . . . . . . . . . . . . . . . . . . . . . 34<br />
3.3 Nondimensionalisation . . . . . . . . . . . . . . . . . . . . . . 36<br />
3.4 Steady <strong>Channel</strong> <strong>Flow</strong> Data . . . . . . . . . . . . . . . . . . . . 37<br />
3.4.1 Empirical Profile for U + . . . . . . . . . . . . . . . . . 39<br />
3.4.2 Empirical Profile for − 〈uv〉 + . . . . . . . . . . . . . . 39<br />
3.4.3 Empirical Profile for k + . . . . . . . . . . . . . . . . . 40<br />
3.4.4 Empirical Profile for 〈u 2 〉 + . . . . . . . . . . . . . . . . 41<br />
3.4.5 Empirical Profile for 〈v 2 〉 + . . . . . . . . . . . . . . . . 42<br />
3.4.6 <strong>Near</strong>-<strong>Wall</strong> Behaviour . . . . . . . . . . . . . . . . . . . 43<br />
3.5 Local Nondimensionalisation . . . . . . . . . . . . . . . . . . . 45<br />
4 Numerical Implementation 48<br />
4.1 <strong>The</strong> Mesh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48<br />
4.2 Volume Integral Form . . . . . . . . . . . . . . . . . . . . . . 50<br />
4.3 Discretisation . . . . . . . . . . . . . . . . . . . . . . . . . . . 51<br />
4.4 Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . . 54<br />
4.4.1 <strong>Wall</strong> Boundaries on k-ε . . . . . . . . . . . . . . . . . . 55<br />
4.4.2 <strong>Wall</strong> Boundaries on k-ω . . . . . . . . . . . . . . . . . 55<br />
4.4.3 <strong>The</strong> Logarithmic Law of the <strong>Wall</strong> . . . . . . . . . . . . 56<br />
4.4.4 <strong>The</strong> Subgrid Approach . . . . . . . . . . . . . . . . . . 60<br />
4.5 Under-Relaxation . . . . . . . . . . . . . . . . . . . . . . . . . 64<br />
5 Results 66<br />
5.1 Steady <strong>Flow</strong> Results . . . . . . . . . . . . . . . . . . . . . . . 68<br />
5.2 Prescribed <strong>Periodic</strong> Pressure Gradient . . . . . . . . . . . . . 71<br />
5.3 Prescribed <strong>Periodic</strong> Bulk <strong>Flow</strong> Rate . . . . . . . . . . . . . . . 75<br />
6 Conclusions & Suggestions for Future Work 83<br />
v
List of Figures<br />
2.1 <strong>The</strong> log-law compared <strong>to</strong> experiments in channel flow . . . . . 30<br />
4.1 <strong>The</strong> low-Reynolds-number grid . . . . . . . . . . . . . . . . . 49<br />
4.2 <strong>The</strong> high-Reynolds-number grid . . . . . . . . . . . . . . . . . 57<br />
4.3 <strong>The</strong> subgrid mesh, adapted from Gant [21] . . . . . . . . . . . 60<br />
3.1 Reichardt’s law <strong>to</strong> estimate U + . . . . . . . . . . . . . . . . . 100<br />
3.2 Reichardt’s law applied <strong>to</strong> − 〈uv〉 + . . . . . . . . . . . . . . . 101<br />
3.3 A revised profile for − 〈uv〉 + . . . . . . . . . . . . . . . . . . . 102<br />
3.4 A profile for k + . . . . . . . . . . . . . . . . . . . . . . . . . . 103<br />
3.5 A profile for 〈uu〉 + . . . . . . . . . . . . . . . . . . . . . . . . 104<br />
3.6 A profile for 〈vv〉 + . . . . . . . . . . . . . . . . . . . . . . . . 105<br />
3.7 <strong>Near</strong>-wall behaviour of flow parameters . . . . . . . . . . . . . 106<br />
3.8 y ∗ vs. y + . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107<br />
3.9 U ∗ superimposed on U + . . . . . . . . . . . . . . . . . . . . . 108<br />
3.10 y ∗ v2 vs. y + . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109<br />
3.11 U ∗ v2 superimposed on U + . . . . . . . . . . . . . . . . . . . . . 110<br />
5.1 〈U〉 + vs y/δ in the steady flow case . . . . . . . . . . . . . . . 111<br />
5.2 k + vs y/δ in the steady flow case . . . . . . . . . . . . . . . . 112<br />
5.3 〈U〉 + vs y + in the steady flow case . . . . . . . . . . . . . . . 113<br />
5.4 k + vs y + in the steady flow case . . . . . . . . . . . . . . . . . 114<br />
vi
5.5 Bulk flow variation in the periodic pressure case . . . . . . . . 115<br />
5.6 <strong>Wall</strong> shear stress variation in the periodic pressure case . . . . 116<br />
5.7 Variables with time at y/δ = 0.1 (prescribed<br />
5.8 Variables with time at y/δ = 0.2 (prescribed<br />
5.9 Variables with time at y/δ = 0.5 (prescribed<br />
5.10 Variables with time at y/δ = 0.9 (prescribed<br />
5.11 〈U〉 vs y/δ snapshots through time (prescribed<br />
5.12 〈U〉 vs y/δ snapshots through time (prescribed<br />
5.13 k vs y/δ snapshots through time (prescribed<br />
5.14 k vs y/δ snapshots through time (prescribed<br />
5.15 〈U〉 vs y + snapshots through time (prescribed<br />
5.16 〈U〉 vs y + snapshots through time (prescribed<br />
5.17 k vs y + snapshots through time (prescribed<br />
5.18 k vs y + snapshots through time (prescribed<br />
∂〈P 〉<br />
) . . . . . . . 117<br />
∂x<br />
∂〈P 〉<br />
) . . . . . . . 118<br />
∂x<br />
∂〈P 〉<br />
) . . . . . . . 119<br />
∂x<br />
∂〈P 〉<br />
) . . . . . . . 120<br />
∂x<br />
∂〈P 〉<br />
) - part 1 . 121<br />
∂x<br />
∂〈P 〉<br />
) - part 2 . 122<br />
∂x<br />
∂〈P 〉<br />
) - part 1 . . 123<br />
∂x<br />
∂〈P 〉<br />
) - part 2 . . 124<br />
∂x<br />
∂〈P 〉<br />
) - part 1 . 125<br />
∂x<br />
∂〈P 〉<br />
) - part 2 . 126<br />
∂x<br />
∂〈P 〉<br />
) - part 1 . . . 127<br />
∂x<br />
∂〈P 〉<br />
) - part 2 . . . 128<br />
∂x<br />
5.19 Pressure variation in the periodic bulk flow . . . . . . . . . . . 129<br />
5.20 <strong>Wall</strong> shear stress variation in the periodic bulk flow case . . . 130<br />
5.21 Variables with time at y/δ = 0.1 (prescribed U) . . . . . . . . 131<br />
5.22 Variables with time at y/δ = 0.2 (prescribed U) . . . . . . . . 132<br />
5.23 Variables with time at y/δ = 0.5 (prescribed U) . . . . . . . . 133<br />
5.24 Variables with time at y/δ = 0.9 (prescribed U) . . . . . . . . 134<br />
5.25 〈U〉 vs y/δ snapshots through time (prescribed U) - part 1 . . 135<br />
5.26 〈U〉 vs y/δ snapshots through time (prescribed U) - part 2 . . 136<br />
5.27 k vs y/δ snapshots through time (prescribed U) - part 1 . . . 137<br />
5.28 k vs y/δ snapshots through time (prescribed U) - part 2 . . . 138<br />
5.29 〈U〉 vs y + snapshots through time (prescribed U) - part 1 . . . 139<br />
5.30 〈U〉 vs y + snapshots through time (prescribed U) - part 2 . . . 140<br />
5.31 k vs y + snapshots through time (prescribed U) - part 1 . . . . 141<br />
vii
5.32 k vs y + snapshots through time (prescribed U) - part 2 . . . . 142<br />
viii
List of Tables<br />
2.1 Constants in the standard k-ε model [33] . . . . . . . . . . . . 22<br />
2.2 Constants in the Wilcox 1988 k-ω model [89] . . . . . . . . . . 26<br />
2.3 Log-law constants [83] . . . . . . . . . . . . . . . . . . . . . . 27<br />
2.4 <strong>Near</strong>-wall flow regimes adapted from [53] . . . . . . . . . . . . 28<br />
3.1 Qualitative behaviour of terms in Equation 3.41 . . . . . . . . 41<br />
3.2 Qualitative behaviour of terms in Equation 3.42 . . . . . . . . 42<br />
4.1 <strong>The</strong> notation for discretised values . . . . . . . . . . . . . . . 50<br />
4.2 Under-relaxation fac<strong>to</strong>rs used in the main grid . . . . . . . . . 65<br />
4.3 Under-relaxation fac<strong>to</strong>rs used in the subgrid . . . . . . . . . . 65<br />
5.1 Configurations of turbulence models . . . . . . . . . . . . . . . 67<br />
ix
Chapter 1<br />
Introduction & Literature<br />
Survey<br />
1.1 Background<br />
Computational Fluid Dynamics (CFD) is a field of study that seeks <strong>to</strong> simu-<br />
late and predict fluid flow using computers. CFD may occasionally be used<br />
<strong>to</strong> investigate the physical behaviour of flow, but the usual goal is <strong>to</strong> provide<br />
an input <strong>to</strong> engineering analysis and design. Following from this goal, the<br />
thrust of most CFD development is <strong>to</strong> continually reduce the extent of the<br />
tradeoff between the predictive accuracy and the computational affordability<br />
of CFD. <strong>The</strong> field of CFD has developed quickly in recent decades because<br />
of the rapid advance and increasing accessibility of computer technology.<br />
Having first made CFD possible, then practical as an engineering <strong>to</strong>ol, this<br />
ongoing advancement increasingly drives a trend <strong>to</strong>ward more complex cal-<br />
culations. Recognising this, researchers in CFD tend <strong>to</strong> direct their efforts<br />
<strong>to</strong>ward enhancing the predictive accuracy per unit cost of CFD treatments<br />
1
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 2<br />
that are ever more complex.<br />
<strong>The</strong> type of flow considered in this thesis is incompressible and New<strong>to</strong>nian.<br />
On scales that are several orders of magnitude larger than the molecular<br />
scale, the flow is governed by the Navier-S<strong>to</strong>kes equations. <strong>The</strong>se equations<br />
model a flow field as a continuum. CFD codes discretise the flow domain<br />
<strong>to</strong> allow variables <strong>to</strong> be represented numerically. <strong>The</strong> most common type of<br />
discretisation is the Finite Volume method, which is applied in this work. <strong>The</strong><br />
governing equations of fluid flow identify a large degree of interconnectedness<br />
between the various properties of a flow field. Because of this, most CFD<br />
codes use an iterative approach. This involves traversing the flow field and<br />
everywhere calculating flow parameters based on local information. <strong>The</strong><br />
solution converges as this process is repeated with updated local information.<br />
In general, a flow field is a complex system with mechanisms for internal<br />
feedback. Because of this, a flow field can exhibit chaotic behaviour. This<br />
means that, although fluid flow is deterministic, it may appear <strong>to</strong> include<br />
randomness because of its extreme physical complexity. A flow is classed as<br />
turbulent when it behaves chaotically. This is a subjective definition, and<br />
there does exist ‘transitional flow’ where the appropriateness of classing the<br />
flow as turbulent is unclear. However, most flows of relevance <strong>to</strong> engineering<br />
applications are clearly turbulent, and most CFD work is aimed at predicting<br />
the behaviour of turbulent flow. Most commonly, this is accomplished by<br />
the adoption of a turbulence model that makes use of certain assumptions <strong>to</strong><br />
approximate flow behaviour using more tractable equations. This precludes<br />
the possibility of predicting every feature of the flow, but the parameters<br />
providing the greatest engineering relevance may be estimated at a greatly<br />
reduced computational cost.
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 3<br />
One approach <strong>to</strong> turbulence modelling is the Reynolds Averaged Navier-<br />
S<strong>to</strong>kes (RANS) type. RANS models use time- or ensemble-averaged Navier-<br />
S<strong>to</strong>kes equations <strong>to</strong> calculate the mean values of flow parameters. 1 <strong>The</strong><br />
fluctuating components of these parameters are modelled, rather than being<br />
fully resolved. Conceptually, this amounts <strong>to</strong> solving a flow as though it<br />
were laminar, but with the addition of modelled turbulence superimposed<br />
over the bulk flow behaviour. This modelled turbulence affects the bulk flow<br />
according <strong>to</strong> the details of the model.<br />
<strong>The</strong> most popular RANS models are the Eddy-Viscosity Models (EVMs).<br />
EVMs model the affect of turbulence on bulk flow via the concept of turbulent<br />
viscosity. Local turbulence is presumed <strong>to</strong> manifest itself as an increase in<br />
the effective viscosity of the fluid. <strong>The</strong> physical justification for this concept<br />
is that turbulence entails greater interaction between fluid particles. This<br />
leads <strong>to</strong> a greater exchange of energy between adjacent parcels of fluid. In<br />
terms of the momentum equations, this interaction produces an effect that<br />
is analogous <strong>to</strong> increased viscosity.<br />
<strong>The</strong> EVM may be extended by the incorporation of non-linear terms [77, 14]<br />
This is the non-linear type of EVM. An alternative <strong>to</strong> EVMs is presented<br />
by the Reynolds Stress Transport models [69, 15]. Here, the products and<br />
squares of root-mean-square velocity fluctuations (Reynolds stresses) are cal-<br />
culated as being convected and diffused through the flow field according <strong>to</strong><br />
their own transport equations. This thesis deals with the application of linear<br />
EVM RANS.<br />
1 Ensemble averaging is associated with periodic flow problems, and time averaging is<br />
associated with steady problems.
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 4<br />
Another type of CFD is Direct Numerical Simulation (DNS) [30]. DNS in-<br />
volves numerical approximations <strong>to</strong> discretize the flow field, but no turbu-<br />
lence model is used. Instead, DNS resolves all the quantities associated<br />
with a flow, including small-scale turbulent fluctuations. DNS is very com-<br />
putationally expensive, and is only employed for problems involving simple<br />
geometries and low Reynolds numbers. Although there is a potential for<br />
error in DNS studies, DNS results are usually taken <strong>to</strong> represent true fluid<br />
behaviour, when compared against modelled results. Because DNS provides<br />
more complete information than do experiments, DNS data are often used<br />
<strong>to</strong> validate turbulence models.<br />
A popular test case for CFD is channel flow. <strong>The</strong> geometrical simplicity<br />
of channel flow allows solutions <strong>to</strong> be achieved at minimal computational<br />
expense and also reduces the complexity of the CFD code, minimizing the<br />
potential for errors in coding. This thesis deals with channel flow. In addi-<br />
tion <strong>to</strong> the steady-flow case, a variable pressure gradient is applied <strong>to</strong> test<br />
the impact of periodic fluctuations on the solution method. <strong>The</strong> solution of<br />
channel flow leads <strong>to</strong> a system of equations that is parabolic, meaning that<br />
they may be solved using only local and upstream information. In the case<br />
of steady flow, the flow field is also statistically stationary, meaning that flow<br />
statistics such as mean flow and turbulence levels are invariant with time.<br />
In the case where a variable pressure gradient is applied, the flow field is<br />
not strictly stationary, but a converged solution produces results which are<br />
statistically stationary with respect <strong>to</strong> a given phase angle of pressure gradi-<br />
ent fluctuation. Thus, ensemble averaging of the Navier-S<strong>to</strong>kes equations is<br />
used.
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 5<br />
1.2 Turbulence Models<br />
RANS models are based upon the idea of filtering turbulence from the gov-<br />
erning equations of a flow so that it may be treated separately. This is due<br />
<strong>to</strong> Reynolds [59]. In EVMs, the problem of knowing the effect of turbulence<br />
on the mean flow is made tractable by employing the idea of a turbulent<br />
viscosity, based on the work of Boussinesq [6]. Turbulent viscosity may be<br />
calculated in a number of different ways.<br />
<strong>The</strong> simplest approach is <strong>to</strong> specify the turbulent viscosity at a given location<br />
based on known local quantities. Models based on this approach are called<br />
‘algebraic models’. Taylor [80] and Prandtl [54] have proposed an algebraic<br />
model in which turbulent viscosity is calculated as a function of a length scale<br />
and a local mean velocity gradient. <strong>The</strong> length scale is specified as a function<br />
of wall-distance. Unfortunately, an appropriate length scale can be difficult<br />
<strong>to</strong> obtain in complex geometries. Another limitation of algebraic models is<br />
that the dependence of turbulent viscosity on a local mean velocity gradient<br />
is unrealistic in many types of flow.<br />
To remove the latter limitation of algebraic models, ‘one-equation’ models<br />
track an additional turbulent quantity through the solution of an additional<br />
transport equation. <strong>The</strong> most popular choice of the additional quantity is<br />
the turbulent kinetic energy per unit mass, k (usually referred <strong>to</strong> simply as<br />
turbulent kinetic energy). Prandtl [55] proposed this approach. Spalart et<br />
al. [73] have proposed directly solving a transport equation for turbulent<br />
viscosity. A limitation that is common <strong>to</strong> all one-equation models is that a<br />
length scale is still required <strong>to</strong> fully specify the modelled flow.
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 6<br />
To remove the dependence on a length scale, ‘two-equation’ models intro-<br />
duce an additional transported quantity. Various choices exist for the second<br />
quantity. Kolmogorov [31] suggested k 1<br />
2 /l, where l is the mixing length. This<br />
quantity has later been dubbed ω. Chou [9] proposed modelling the rate of<br />
dissipation of turbulence, ε. In terms of dimensional analysis, this amounts<br />
<strong>to</strong> modelling k 3<br />
2 /l. However, it may be argued that turbulent dissipation,<br />
which involves the conversion of turbulent energy <strong>to</strong> heat, takes place on a<br />
physically much smaller scale than turbulence itself, so that ε and k 3<br />
2 /l may<br />
not be the same thing [91].<br />
Other choices for the transported quantities bear mentioning. Rotta [63]<br />
and Spalding [74] proposed l as the second quantity. Rotta [64], Rodi &<br />
Spalding [62], and Ng & Spalding [46] proposed models using the product kl.<br />
Spalding [75], Wilcox & Rubesin [88], and Robinson et al. [61] have proposed<br />
ω 2 . Coakley [10] proposed k 1<br />
2 and ω as the two transported quantities. <strong>The</strong>se<br />
two-equation models are compared and discussed by Wilcox [91].<br />
<strong>The</strong> most popular choice of two-equation model is the k-ε model of Launder<br />
& Sharma [33]. This is a revised tuning of the k-ε model of Jones & Launder<br />
[27]. <strong>The</strong>se papers follow the work of Chou [9], Davidov [19], and Harlow &<br />
Nakayama [23]. <strong>The</strong> work of Jones & Launder introduced a modification <strong>to</strong> k-<br />
ε modelling that allowed the model <strong>to</strong> be applied in the near-wall region. <strong>The</strong><br />
model of Launder & Sharma is commonly called the ‘standard’ k-ε model.<br />
Yap [92] improved the performance of the standard k-ε model in impinging<br />
and recirculating flow. Yap’s modification, the ‘Yap correction’ is a popular<br />
addition <strong>to</strong> the model.<br />
<strong>The</strong> k-ω model is a popular alternative <strong>to</strong> the k-ε model. Following the
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 7<br />
work of Kolmogorov [31] and Saffman [65], Wilcox [89] proposed the most<br />
well-known k-ω model. <strong>The</strong> model does not require the same damping terms<br />
employed by the standard k-ε model in order <strong>to</strong> be effective in the near-wall<br />
region, but boundary conditions are more difficult <strong>to</strong> apply. <strong>The</strong> principal<br />
difficulty associated with the k-ω model is in specifying a value for ω in free-<br />
stream turbulence [40]. Speziale et al. [76], Menter [41], Peng et al. [52],<br />
and Wilcox [90] have proposed modifications <strong>to</strong> the k-ω that further improve<br />
its performance at the cost of adding much the same degree of complexity<br />
found in the standard k-ε model.<br />
<strong>The</strong> SST 2 model of Menter [42] may be thought of as a hybrid k-ε / k-ω<br />
approach. It employes a k-ω model near solid boundaries and a k-ε model<br />
elsewhere. <strong>The</strong> SST model is appealing because the principal strength of<br />
the k-ω model is its simplicity and relative accuracy in the near-wall region,<br />
while the k-ε model is generally more effective in free-stream flow. <strong>The</strong> SST is<br />
implemented by the use of a blending function <strong>to</strong> provide a smooth transition<br />
between the two models.<br />
1.3 <strong>Wall</strong> Functions & the Subgrid Approach<br />
<strong>Near</strong> solid boundaries, the gradients of turbulence quantities become large.<br />
Numerically, this means that greater s<strong>to</strong>rage and computational demands are<br />
placed on a CFD code that performs calculations in the near-wall region. To<br />
avoid this, wall functions are often employed. A wall function is a solution<br />
method that provides a means of characterising turbulence at some point,<br />
2 Shear Stress Transport
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 8<br />
P away from the wall. <strong>The</strong> calculations performed by the wall function<br />
are simpler than applying a full CFD approach between the wall and the<br />
point P . Thus, a computational savings is achieved. <strong>The</strong> CFD code then<br />
calculates the remaining flow field, taking the wall-function output at point P<br />
as a boundary condition, replacing the actual wall boundary condition. <strong>The</strong><br />
disadvantage of wall functions is that they cannot provide the same level of<br />
accuracy as a full CFD treatment near the wall, except in certain flows for<br />
which they were explicitly designed. 3<br />
<strong>The</strong> most common type of wall function is that which relies on the ‘logarith-<br />
mic law of the wall’. This empirical equation relates velocity <strong>to</strong> wall-normal<br />
distance within a certain near-wall region. Launder & Spalding [34] have<br />
produced a log-law-based wall-function that is a popular default in many<br />
industrial applications. In addition <strong>to</strong> offering a means of calculating near-<br />
wall velocity, turbulent kinetic energy, k is calculated by tracking the rates<br />
of production and dissipation of this quantity, averaged analytically over the<br />
near-wall region. This wall function acts as a one-equation model in the<br />
sense that it only resolves production and dissipation of one quantity. When<br />
used as a boundary condition on two-equation models, the second turbulence<br />
quantity is calculated from k and the length scale. Launder & Spalding offer<br />
a means of calculating ε. Wilcox [91] offers a similar wall function for the<br />
k-ω model.<br />
Various other wall treatments exist. <strong>The</strong>se may be thought of as falling on<br />
a spectrum between a costly but relatively accurate full CFD solution and,<br />
as the other polar extreme, a set of simple algebraic expressions resulting<br />
3 <strong>The</strong> great majority of wall functions have been designed for steady channel flow,<br />
including the wall function of Launder & Spalding [34] employed in this work.
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 9<br />
from an analytical treatment of some presumed near-wall behaviour. Be-<br />
tween these two extremes, various alternatives exist. Broadly, these may be<br />
classified as either attempting <strong>to</strong> extend the applicability of standard wall<br />
functions through the incorporation of more complex mathematics and more<br />
accurate empirical and theoretical information or attempting <strong>to</strong> simplify CFD<br />
near the wall <strong>to</strong> achieve accurate near-wall solutions at less computational<br />
expense than the full CFD treatment.<br />
In the realm of extending the applicability of analytical wall functions, Amano<br />
[3] presented a wall function that finds average production and destruction<br />
of ε, in addition <strong>to</strong> k. Thus, the use of the length scale <strong>to</strong> calculate ε is<br />
avoided. Smith [72] and Craft et al. [17] have proposed wall functions using<br />
numerical, rather than analytical methods <strong>to</strong> obtain near-wall averaged val-<br />
ues within the wall function. This allows the use of more complex equations<br />
for turbulence quantities in the wall function, more closely approximating<br />
the RANS equations that would be solved by a full CFD treatment. Viegas<br />
& Rubesin [84] offered a wall function for compressible flow.<br />
Much progress has been made at <strong>UMIST</strong> in reducing the computational<br />
cost of CFD near solid boundaries. This approach may still be classified<br />
as a wall function treatment, in the sense that the main CFD code sees<br />
a ‘black box’ calculation scheme offering values for flow quantities in the<br />
near-wall region obtained at a reduced computational cost. However, the<br />
approach is not analytical, and instead may be described as using a simplified<br />
CFD calculation applied <strong>to</strong> the near-wall region. Thus, a potential exists<br />
for this simplified CFD approach <strong>to</strong> offer enhanced accuracy over other wall<br />
functions, although the implementation is generally more costly and complex.
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 10<br />
A precursor <strong>to</strong> simplified CFD wall functions is the PSL 4 approach of Ia-<br />
covides [25]. This is a modification <strong>to</strong> the full CFD near-wall solution that<br />
constrains the CFD code <strong>to</strong> ignore the coupling between velocity and pressure<br />
in the near-wall region. Instead, the static pressure distribution is taken as<br />
fixed in this region. This results in significant computational savings. Craft<br />
et al. [18] extended this approach by encapsulating the near-wall CFD cal-<br />
culation as an independent code using its own subgrid <strong>to</strong> perform simplified<br />
CFD calculations in the near-wall region. Thus, the simplified CFD approach<br />
was encapsulated as a wall function. This approach is called <strong>UMIST</strong>-N 5 . As<br />
with PSL, the assumption of constant pressure distribution results in equa-<br />
tions which are parabolic and may be solved using simplified methods. A<br />
momentum equation is not employed for wall-normal velocity. Instead, lo-<br />
cal conservation of mass is employed in the near-wall region <strong>to</strong> determine<br />
wall-normal velocities from wall-parallel velocities.<br />
<strong>UMIST</strong>-N offers a simplified near-wall treatment, relative <strong>to</strong> a full CFD solu-<br />
tion, but it resolves a two-equation turbulence model near the wall. <strong>UMIST</strong>-<br />
N returns near-wall averaged production and destruction of two turbulence<br />
parameters <strong>to</strong> the main grid, eliminating the use of a length scale. <strong>The</strong><br />
development of <strong>UMIST</strong>-N is detailed in the PhD thesis of Gant [21]. <strong>The</strong><br />
k-ε model has been employed in <strong>UMIST</strong>-N, including the non-linear EVM<br />
k-ε model of Craft et al. [14]. <strong>UMIST</strong>-N has been applied <strong>to</strong> channel flow,<br />
impinging jet, spinning disk, and Ahmed body flow, and has been adapted<br />
<strong>to</strong> non-orthogonal coordinate systems [16, 21]. All flows considered thus far<br />
have been steady in time.<br />
4 Parabolic Sub-Layer<br />
5 Unified Modelling through Integrated Sublayer <strong>Treatment</strong> - a N umerical approach
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 11<br />
1.4 Relevance <strong>to</strong> Large Eddy Simulation<br />
Large Eddy Simulation (LES) is a modelling approach that allows large-<br />
scale turbulent fluctuations <strong>to</strong> remain represented within the Navier-S<strong>to</strong>kes<br />
equations while small-scale turbulent fluctuations are filtered out statistically<br />
and treated separately. Thus it can be thought of as offering a compromise<br />
between DNS and RANS. <strong>The</strong> LES approach involves the complexities of<br />
resolving large-scale turbulence, of modelling small-scale turbulence, and of<br />
handling the interaction between these two scales of turbulence. However,<br />
LES provides a potential for greater predictive accuracy than any RANS<br />
method.<br />
LES and RANS approaches are far from alien, and hybrid calculations have<br />
been undertaken. Labourasse & Sagaut [32] have run LES within an overall<br />
RANS calculation. This provided a solution that exhibited the robustness<br />
of a RANS method with some additional accuracy derived from the use of<br />
LES. Quéméré et al. [56] have run RANS and LES calculations alongside one<br />
another in different zones within a flow domain. <strong>The</strong>se hybrid investigations<br />
highlight the complimentary strengths of RANS and LES in some flows.<br />
LES and RANS face analogous tradeoffs in the treatment of flow near solid<br />
boundaries. Performing a detailed LES calculation <strong>to</strong> resolve the turbulence<br />
near a wall is very computationally expensive. In most LES calculations,<br />
a wall function based on the logarithmic law of the wall is used <strong>to</strong> specify<br />
boundary conditions at a finite distance away from the wall. Balaras et al. [5]<br />
improved upon this by obtaining wall shear stress from a near-wall subgrid<br />
result within an LES calculation. <strong>The</strong> subgrid employed an algebraic model<br />
<strong>to</strong> obtain wall-parallel velocity and thus obtain a wall shear stress <strong>to</strong> act as
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 12<br />
a boundary condition on the LES solution.<br />
<strong>The</strong> <strong>UMIST</strong>-N approach entails a more complex calculation than that used<br />
by Balaras et al. and may offer improved results if used in LES. Certainly,<br />
a potential exists for <strong>UMIST</strong>-N <strong>to</strong> provide value in LES calculations. In<br />
the future, advanced wall functions may help <strong>to</strong> alleviate the well-known<br />
challenge in LES of adequately resolving the grid in regions where turbulence<br />
is generated by ‘driving mechanisms’.<br />
Because LES calculations resolve large-scale turbulent structures, any local<br />
region of an LES calculation space can be exposed <strong>to</strong> rapid fluctuations as<br />
eddies shift and move through the flow field. <strong>The</strong>refore, the application of<br />
<strong>UMIST</strong>-N <strong>to</strong> periodic flow represents an important first step in assessing its<br />
suitability <strong>to</strong> LES.<br />
1.5 <strong>Periodic</strong> <strong>Flow</strong><br />
<strong>Periodic</strong> flow refers <strong>to</strong> an arrangement in which the flow field varies smoothly<br />
and cyclicly as a function of time. This is sometimes referred <strong>to</strong> as oscillating<br />
flow. However, some researchers assert that the term ‘oscillating’ implies<br />
reciprocation, meaning that the direction of the bulk flow (and not merely<br />
its magnitude) is changing with time. This distinction is of questionable<br />
value. In this work, ‘periodic’ is used as the generic term. Furthermore,<br />
the term ‘periodic boundary conditions’ refers <strong>to</strong> boundary conditions that<br />
vary with time, driving periodic flow. This is distinct from the arrangement<br />
where values at an output boundary are copied <strong>to</strong> an input boundary in a<br />
loop. This type of boundary condition is also termed ‘periodic’, but these do
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 13<br />
not appear in the present work.<br />
<strong>Periodic</strong> flow provides an interesting test case, because it offers insight in<strong>to</strong><br />
some of the more illusive physical behaviours of a flow even in relatively<br />
simple geometries. Various experimentalists have investigated periodic flow<br />
in pipe and channel geometries. Sarpkaya [66] investigated periodically- and<br />
randomly-pulsed flow in a pipe from the standpoint of understanding the<br />
conditions under-which the flow transitioned <strong>to</strong> turbulence. Ohmi & Iguchi<br />
[48] performed an investigation in a similar vein, and Ohmi et al. [49, 50] also<br />
investigated higher Reynolds numbers. Tu & Ramaprian [82, 57] performed<br />
widely-recognised experimental work in<strong>to</strong> periodic pipe flow at a rather high<br />
Reynolds number. More recently, Tardu et al. [79] have investigated periodic<br />
channel flow. Hino et al. [24] performed an investigation of periodic flow at<br />
approximately the same time as Tu & Ramaprian, but their use of a rectan-<br />
gular duct geometry may have impacted the receptiveness of the modelling<br />
community <strong>to</strong> their results.<br />
Other interesting studies bear mentioning. Shemer et al. [68] offered a com-<br />
parison between laminar and turbulent flows at the same Reynolds number<br />
and under the same periodic conditions. Sleath [71] and Jensen et al. [26]<br />
investigated the impact of various surface roughnesses. Siginer [70] investi-<br />
gated periodic pipe flow using a non-New<strong>to</strong>nian fluid. Scotti & Piomelli [67]<br />
have applied LES <strong>to</strong> periodic channel flow at a range of oscillation frequen-<br />
cies. Lee et al. [36] and Walther et al. [85] have investigated heat transfer<br />
in periodic flow. Lodahl et al. [38] have investigated periodic pipe flow with<br />
a periodic applied electric current.<br />
Furthermore, internal combustion engine experiments offer insight in<strong>to</strong> pe-
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 14<br />
riodic flow. Ahmadi-Befrui et al. [2] published mean velocity readings at<br />
various locations within a cylinder through a pis<strong>to</strong>n stroke. Tabaczynski [78]<br />
has investigated reciprocating flow in engines. Also, the Society of Au<strong>to</strong>mo-<br />
tive Engineers has published an extensive collection of results.<br />
One very notable DNS study of periodic flow is that of Kawamura & Homma<br />
[29], which investigates channel flow at a low Reynolds number driven by a<br />
periodic pressure gradient. <strong>The</strong> periodic flow results presented in this thesis<br />
are compared against the DNS results of Kawamura & Homma.<br />
Various researcher have investigated the use of turbulence models in predict-<br />
ing periodic flow. Cot<strong>to</strong>n & Ismael [12] applied the standard k-ε model <strong>to</strong><br />
periodic pipe flow. Cot<strong>to</strong>n et al. [13] and Addad [1] have investigated the use<br />
of Reynolds Stress Transport models in predicting periodic flow. Watkins [86]<br />
produced an early investigation in<strong>to</strong> the use of CFD in internal combustion<br />
engines, and various other studies have followed [60, 35]. Nai<strong>to</strong>h & Kuwahara<br />
[45] applied LES <strong>to</strong> engine flow.<br />
<strong>The</strong> relevance of wall-functions <strong>to</strong> periodic flow has received less attention.<br />
<strong>The</strong> <strong>UMIST</strong>-N subgrid wall function has not been applied <strong>to</strong> periodic flow<br />
prior <strong>to</strong> this work. Standard wall functions are generally applied <strong>to</strong> internal<br />
combustion engine studies.<br />
1.6 Study Objectives<br />
<strong>The</strong> primary objective of this study is <strong>to</strong> assess the applicability of the<br />
<strong>UMIST</strong>-N subgrid near-wall treatment <strong>to</strong> a periodic flow problem, relative <strong>to</strong>
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 15<br />
other popular approaches. <strong>The</strong> secondary objective is <strong>to</strong> experiment with the<br />
use of the k-ω model in the subgrid solution scheme. This work represents<br />
the first application of the <strong>UMIST</strong>-N approach <strong>to</strong> time-variant flow and the<br />
first use of a k-ω model within the subgrid calculation.<br />
<strong>The</strong>se objectives are met through the analysis of the logarithmic law of the<br />
wall, the standard low-Reynolds number k-ε treatment, a k-ε subgrid treat-<br />
ment, and a k-ω subgrid treatment in steady channel flow and in periodically<br />
variable channel flow. <strong>The</strong> results of this study are compared against the de-<br />
tailed DNS data of Kim et al. [30] in the case of steady flow and Kawamura<br />
& Homma [29] in the case of periodic channel flow.<br />
A tertiary objective that arose over the course of the project was <strong>to</strong> inves-<br />
tigate the study of channel flow in general, so as <strong>to</strong> provide some input <strong>to</strong><br />
other CFD efforts that make use of channel flow data. This objective is met<br />
through a detailed background discussion of channel flow, a compilation of<br />
some useful experimental and DNS results concerning channel flow, and the<br />
revision and presentation of a set of analytical profiles <strong>to</strong> characterise the ex-<br />
pected behaviours of flow parameters in a channel as a function of Reynolds<br />
number.<br />
1.7 <strong>The</strong>sis Outline<br />
<strong>The</strong> various turbulence models employed in this work are discussed in Chap-<br />
ter 2. This includes a more detailed discussion of the RANS approach and<br />
a presentation of the k-ε and k-ω models. <strong>The</strong> differences between the high-<br />
and low-Reynolds-number k-ε models are highlighted. <strong>The</strong> logarithmic law
CHAPTER 1. INTRODUCTION & LITERATURE SURVEY 16<br />
of the wall is introduced.<br />
Chapter 3 contains a detailed discussion of channel flow. <strong>The</strong> governing equa-<br />
tions associated with the various turbulence models are adapted <strong>to</strong> channel<br />
flow. <strong>The</strong> chapter also presents various experimental and DNS channel flow<br />
results arising from other studies. Correlations are presented <strong>to</strong> identify<br />
trends in the data that may be useful for the design and testing of CFD<br />
codes. Alternative nondimensionalisation schemes are also investigated.<br />
Chapter 4 contains a discussion of the numerical implementation of the tur-<br />
bulence models. This includes a discussion of the Finite Volume method and<br />
the particular grid arrangements used in this work. Boundary conditions are<br />
also discussed, including the implementation of the logarithmic law of the<br />
wall. Since the novelty of <strong>UMIST</strong>-N is essentially in its numerical treatment<br />
of the boundary layer problem, the approach is detailed in this chapter.<br />
Chapter 5 presents an analysis of the results computed for the various config-<br />
urations considered. This includes steady channel flow, periodic flow results<br />
compared <strong>to</strong> data with the same driving pressure gradient, and periodic flow<br />
results compared <strong>to</strong> data with the same bulk flow rate.<br />
Chapter 6 offers conclusions and suggestions for future work.
Chapter 2<br />
Turbulence Models<br />
<strong>The</strong> Reynolds Averaged Navier S<strong>to</strong>kes equations are obtained for continuity,<br />
conservation of momentum, and generic transport. <strong>The</strong> assumptions of the<br />
EVM are employed where appropriate. <strong>The</strong>n, specific transport equations<br />
are introduced for the turbulence parameters tracked by the k-ε and k-ω<br />
models. <strong>The</strong> logarithmic law of the wall is introduced.<br />
2.1 Reynolds Averaging<br />
Consider a flow field containing an incompressible fluid with constant proper-<br />
ties: density (ρ), dynamic viscosity (µ), and kinematic viscosity (ν = µ<br />
). In ρ<br />
Cartesian coordinates, the flow field extends in three orthogonal directions,<br />
x, y, and z. <strong>The</strong> flow field may vary in time, t. A pressure field, P (x, y, z, t)<br />
and a velocity field, U (x, y, z, t) = (U, V, W ) T are associated with the flow.<br />
This flow field is governed by continuity and the conservation of momentum.<br />
17
CHAPTER 2. TURBULENCE MODELS 18<br />
Furthermore, it is assumed that a passive scalar, having no effect on the fluid<br />
properties, may be convected and diffused through the flow field according<br />
<strong>to</strong> a transport equation.<br />
Neglecting body forces such as gravity, the Navier-S<strong>to</strong>kes equations governing<br />
incompressible, constant-property New<strong>to</strong>nian fluid flow in Cartesian coordi-<br />
nates are<br />
Continuity : ▽ · U = 0 (2.1)<br />
Momentum : DU<br />
Dt<br />
T ransport :<br />
1 = − ▽ P + ▽ · (ν ▽ U) (2.2)<br />
ρ<br />
DΦ<br />
Dt = ▽ · (γ ▽ Φ) + Sφ (2.3)<br />
where Φ (x, y, z, t) represents a scalar quantity transported within the flow<br />
field. γ is the diffusivity of Φ in the fluid. In turbulence modelling, γ is<br />
usually replaced with ν , where σ is the effective Prandtl number of Φ in the<br />
σ<br />
fluid. Sφ (x, y, z, t) in Equation 2.3 is a net source of Φ.<br />
RANS modelling involves time- or ensemble-averaged Navier-S<strong>to</strong>kes equa-<br />
tions. <strong>The</strong> aim of Reynolds averaging is <strong>to</strong> allow separate tracking of mean<br />
flow and turbulent fluctuations. Because time-dependent flows are studied<br />
in this thesis, ensemble averaging is appropriate. Conceptually, an ensemble<br />
average is the mean of the instantaneous values of a parameter through a<br />
large number of repeated experiments. Ensemble averaging is similar <strong>to</strong> time<br />
averaging in that it separates turbulent fluctuations from the bulk flow by de-<br />
composing the velocity field in<strong>to</strong> a mean component (〈U〉) and a fluctuating<br />
velocity component (u), such that U = 〈U〉 + u. 1 Similarly, Φ = 〈Φ〉 + φ.<br />
1 Other popular notations include an over-bar for mean velocity U and a prime on<br />
fluctuating velocity (u ′ ).
CHAPTER 2. TURBULENCE MODELS 19<br />
<strong>The</strong> RANS equations are<br />
D<br />
Dt<br />
Continuity : ▽ · 〈U〉 = 0 (2.4)<br />
Momentum :<br />
T ransport :<br />
D〈U〉<br />
Dt<br />
D〈Φ〉<br />
Dt<br />
= −1 ▽ 〈P 〉 + ▽ · (ν ▽ 〈U〉)<br />
ρ<br />
∂ 〈uu〉 ∂ 〈vu〉 ∂ 〈wu〉<br />
− − −<br />
∂x ∂y ∂z<br />
<br />
ν<br />
<br />
= ▽ · ▽ 〈Φ〉 + Sφ<br />
σ<br />
∂ 〈uφ〉 ∂ 〈vφ〉 ∂ 〈wφ〉<br />
− − −<br />
∂x ∂y ∂z<br />
may be referred <strong>to</strong> as the mean material derivative and is defined by<br />
D<br />
Dt<br />
(2.5)<br />
(2.6)<br />
∂<br />
≡ + 〈U〉 · ▽ (2.7)<br />
∂t<br />
It can be shown [53] that the mean material derivative is related <strong>to</strong> the<br />
material derivative according <strong>to</strong><br />
<br />
DΘ<br />
=<br />
Dt<br />
D 〈Θ〉<br />
Dt<br />
for a quantity Θ = 〈Θ〉 + θ.<br />
∂ ∂ ∂<br />
+ 〈uθ〉 + 〈vθ〉 + 〈wθ〉 (2.8)<br />
∂x ∂y ∂z<br />
For convenience, Equation 2.5 may be re-written as<br />
D 〈U i〉 ∂ 〈P 〉<br />
= −1 +<br />
Dt ρ ∂xi ∂<br />
<br />
ν<br />
∂xj ∂ 〈U <br />
i〉<br />
−<br />
∂xj ∂ <br />
ujui ∂xj<br />
(2.9)<br />
where each side of the equation is a vec<strong>to</strong>r in i comprised of terms that are<br />
summed in j.<br />
By decomposing velocities in<strong>to</strong> mean and fluctuating components, RANS<br />
models seek <strong>to</strong> treat separately the physical details of turbulence. <strong>The</strong> fluctu-<br />
ating velocity components which are associated with turbulence are therefore
CHAPTER 2. TURBULENCE MODELS 20<br />
considered unknown, and must be modelled. <strong>The</strong> EVM models the unknown<br />
− <br />
ujui term in Equation 2.9 by<br />
− <br />
∂ 〈U<br />
ujui =<br />
i〉<br />
νt +<br />
∂xj ∂ <br />
U j<br />
−<br />
∂xi 2<br />
3 kδij (2.10)<br />
where k is turbulent kinetic energy. νt is turbulent viscosity, an additional<br />
viscosity arising as a result of turbulence. δij is the Kronecker delta, defined<br />
such that<br />
⎧<br />
⎨ 1 i = j<br />
δij =<br />
⎩ 0 i = j<br />
(2.11)<br />
Essentially, the EVM replaces ν with (ν + νt) in Equations 2.5 & 2.6. In<br />
summary, the governing equations of the RANS EVM are<br />
Continuity : ▽ · 〈U〉 = 0 (2.12)<br />
Momentum : D〈U〉<br />
Dt<br />
T ransport :<br />
= − 1<br />
ρ ▽ 〈P 〉 + ▽ · ((ν + νt) ▽ 〈U〉) (2.13)<br />
D〈Φ〉<br />
Dt = ▽ · ν+νt<br />
σ<br />
▽ 〈Φ〉 + Sφ<br />
(2.14)<br />
Thus the RANS and EVM method reduces the problem of calculating chaotic<br />
fluctuating velocity components <strong>to</strong> a problem of specifying an unknown local<br />
parameter, the turublent viscosity, νt. A variety of approaches exist for<br />
modelling νt. <strong>The</strong> approaches considered in this thesis are the k-ε model and<br />
the k-ω model.
CHAPTER 2. TURBULENCE MODELS 21<br />
2.2 <strong>The</strong> k-ε Model<br />
<strong>The</strong> high-Reynolds number version of the standard k-ε model of Launder &<br />
Sharma [33] defines turbulent viscosity, νt as<br />
2 k<br />
νt = Cµ<br />
ε<br />
(2.15)<br />
where k is turbulent kinetic energy, and ε is the rate of dissipation of k. Cµ<br />
is a constant given in Table 2.1.<br />
<strong>The</strong> transport equation for k is based on Equation 2.14 (with 〈Φ〉 = k). <strong>The</strong><br />
source term consists of production, Pk and dissipation, ε:<br />
<br />
Dk ν + νt<br />
= ▽ ·<br />
▽ k + Pk − ε (2.16)<br />
Dt σk<br />
Pk is<br />
Pk = −aij 〈Sij〉 (2.17)<br />
where the right hand side of the equation is summed over all permutations<br />
of i and j <strong>to</strong> obtain Pk.<br />
aij is defined as<br />
〈Sij〉 is defined as<br />
aij = u iu j<br />
〈Sij〉 ≡ 1<br />
<br />
∂ 〈U i〉<br />
2 ∂xj − 2<br />
3 kδij<br />
+ ∂ U j<br />
∂xi <br />
Applying the EVM (Equation 2.10) <strong>to</strong> Equation 2.17,<br />
(2.18)<br />
(2.19)<br />
Pk = 2νt 〈Sij〉 〈Sij〉 (2.20)
CHAPTER 2. TURBULENCE MODELS 22<br />
Equation 2.17 is an exact expression for Pk, within the assumptions of the<br />
RANS approach. Equation 2.20 is exact within the assumptions of the RANS<br />
EVM. However, ε is modelled. In k-ε models, ε is obtained through an addi-<br />
tional transport equation. In high-Reynolds-number version of the standard<br />
k-ε model of Launder & Sharma [33] the additional transport equation is<br />
<br />
Dε ν +<br />
<br />
νt<br />
ε<br />
2 ε<br />
= ▽ ·<br />
▽ ε + Cε1 Pk − Cε2<br />
(2.21)<br />
Dt σε<br />
k k<br />
<br />
production destruction<br />
<strong>The</strong> constants appearing in the standard k-ε model are given in Table 2.1.<br />
Table 2.1: Constants in the standard k-ε model [33]<br />
Cµ σk σε Cε1 Cε2<br />
0.09 1.0 1.3 1.44 1.92<br />
2.2.1 <strong>The</strong> Low-Reynolds-Number k-ε Model<br />
If the k-ε model is applied in the near-wall region, viscous corrections are<br />
required in order <strong>to</strong> produce reasonable results. Viscous corrections <strong>to</strong> the k-ε<br />
model involve two modifications. One is the incorporation of so-called viscous<br />
damping terms. Also, a transport equation is solved for a new parameter, ˜ε<br />
rather than ε.<br />
Because ε tends <strong>to</strong> a finite value at a wall, the wall boundary condition on<br />
ε is difficult <strong>to</strong> specify. <strong>The</strong>refore, the ε transport equation is replaced by a<br />
new transport equation of an alternative parameter, ˜ε. ˜ε is defined in such a
CHAPTER 2. TURBULENCE MODELS 23<br />
way that<br />
<strong>The</strong> difference between ˜ε and ε is defined as ˆε:<br />
From Equations 2.22 and 2.23, it follows that<br />
˜ε| y=0 = 0 (2.22)<br />
ε = ˜ε + ˆε (2.23)<br />
ˆε| y=0 = ε| y=0<br />
(2.24)<br />
<strong>The</strong> equation for νt is modified <strong>to</strong> use ˜ε for convenience. Also, damping<br />
terms exist in the equation for νt and the transport equation for ˜ε. <strong>The</strong>se<br />
damping terms are a function of the turbulent Reynolds number, ˜<br />
Ret. ˜<br />
Ret<br />
is a Reynolds number based on local turbulence quantities (in this case, k<br />
and ˜ε). <strong>The</strong> tilde is a reminder that, for convenience, the turbulent Reynolds<br />
number used in the low-Reynolds-number standard k-ε model uses ˜ε rather<br />
than ε. ˜ Ret is defined as<br />
˜Ret ≡ k2<br />
˜εν<br />
(2.25)<br />
In the low-Reynolds-number version of the standard k-ε model [33], the trans-<br />
port equation of ˜ε is<br />
<br />
D˜ε ν + νt<br />
= ▽ ·<br />
Dt σε<br />
where<br />
<br />
▽ ˜ε + Cε1f1<br />
E = 2ννt<br />
<br />
˜ε<br />
Pk − Cε2f2<br />
k<br />
∂ 2 〈U〉<br />
∂y 2<br />
2<br />
2 ˜ε<br />
+ E (2.26)<br />
k<br />
(2.27)<br />
f1 = 1 (2.28)<br />
−Ret ˜<br />
f2 = 1 − 0.3e 2<br />
(2.29)
CHAPTER 2. TURBULENCE MODELS 24<br />
ˆε is required in order <strong>to</strong> calculate ε for use in the k transport equation<br />
(Equation 2.16). ˆε is defined as<br />
ˆε = 2ν<br />
<br />
∂ √ 2 k<br />
∂y<br />
(2.30)<br />
Thus, ˆε does not require a transport equation, but may be solved from local<br />
quantities.<br />
νt is modified according <strong>to</strong><br />
where<br />
2.2.2 Yap Correction<br />
νt = Cµfµ<br />
fµ = exp<br />
⎡<br />
2 k<br />
˜ε<br />
⎣ −2.5<br />
<br />
1 + ˜ Ret<br />
50<br />
⎤<br />
(2.31)<br />
⎦<br />
(2.32)<br />
<strong>The</strong> ‘Yap correction’ refers <strong>to</strong> an additional source term in the ˜ε transport<br />
equation of the low-Reynolds-number k-ε model. <strong>The</strong> Yap correction was<br />
originally introduced by Yap [92] <strong>to</strong> improve the performance of the k-ε<br />
model in impinging and recirculating flows. Yap correction is often implicitly<br />
included in standard k-ε modelling, so it has been included in the present<br />
<strong>UMIST</strong>-N wall function for completeness.<br />
Using Yap correction, the ˜ε transport equation becomes<br />
2<br />
D˜ε ν + νt<br />
˜ε<br />
˜ε<br />
= ▽ ·<br />
▽ ˜ε + Cε1f1 Pk − Cε2f2 + E + Y (2.33)<br />
Dt σε<br />
k<br />
k<br />
with the additional Y source term defined as<br />
⎛⎡<br />
<br />
Y = max ⎝⎣0.83<br />
k 3<br />
2<br />
− 1<br />
2.5˜εy<br />
k 3<br />
2<br />
2.5˜εy<br />
2 2 ˜ε<br />
k<br />
⎤ ⎞<br />
⎦ , 0⎠<br />
(2.34)
CHAPTER 2. TURBULENCE MODELS 25<br />
y is the distance from the wall.<br />
2.3 <strong>The</strong> k-ω Model<br />
<strong>The</strong> k-ω model is like the k-ε model in being dubbed a two-equation model,<br />
because it demands the solution of two additional transport equations in<br />
order <strong>to</strong> characterise turbulence. Like most two-equation models, the k-ω<br />
model tracks turbulent kinetic energy, k. However, the dissipation rate, ε is<br />
not tracked using its own transport equation, as in the k-ε model. Instead, a<br />
transport equation is solved for ω. ω is sometimes referred <strong>to</strong> as the specific<br />
dissipation rate.<br />
<strong>The</strong> Wilcox 1988 k-ω model [89] uses the following transport equation for k:<br />
<br />
Dk ν + νt<br />
= ▽ ·<br />
▽ k + Pk − ωkβ<br />
Dt σkω<br />
∗<br />
(2.35)<br />
so that ω is defined as<br />
ω ≡ ε<br />
kβ ∗<br />
(2.36)<br />
Pk is defined in the same way as for the k-ε model, as shown in Equation<br />
2.20.<br />
<strong>The</strong> equation for νt becomes<br />
νt = γ ∗<br />
<strong>The</strong> transport equation for ω is<br />
<br />
Dω ν + νt<br />
= ▽ ·<br />
Dt σω<br />
<br />
k<br />
ω<br />
<br />
▽ ω + γ<br />
<br />
ω<br />
<br />
Pk − βω<br />
k<br />
2<br />
(2.37)<br />
(2.38)
CHAPTER 2. TURBULENCE MODELS 26<br />
<strong>The</strong> constants appearing in the Wilcox 1988 k-ω model are given in Table<br />
2.2.<br />
Table 2.2: Constants in the Wilcox 1988 k-ω model [89]<br />
β β ∗ γ γ ∗ σkω σω<br />
0.075 0.09 5<br />
9 1 2 2<br />
2.4 <strong>The</strong> Logarithmic Law of the <strong>Wall</strong><br />
<strong>The</strong> wall function approach spares the CFD code from resolving the be-<br />
haviour of the flow in the near-wall region. <strong>The</strong> standard wall function<br />
approach is <strong>to</strong> assume that the the flow behaviour at a certain distance away<br />
from the wall will match the logarithmic law of the wall. <strong>The</strong> governing<br />
equations are solved in the bulk of the flow regime, with the logarithmic law<br />
of the wall providing a boundary condition near the wall.<br />
<strong>Wall</strong> functions are often used with the high-Reynolds-number standard k-ε<br />
model. <strong>The</strong> wall function approach is essentially an alternative <strong>to</strong> the low-<br />
Reynolds-number approach, providing computational savings at the cost of<br />
reduced accuracy. <strong>Wall</strong> functions may be applied <strong>to</strong> the k-ω model, but,<br />
since the advantages of the k-ω model are primarily in its behaviour near the<br />
wall, this is seldom done in practice. <strong>Wall</strong> functions on k, ε, and wall-parallel<br />
velocity, 〈U〉 will be discussed here from a conceptual standpoint. A detailed<br />
discussion of the implementation of log law boundary conditions is left until<br />
Chapter 4.
CHAPTER 2. TURBULENCE MODELS 27<br />
<strong>The</strong> logarithmic law of the wall assumes a logarithmic relationship between<br />
velocity and displacement away from a solid boundary. <strong>The</strong>se quantities are<br />
expressed nondimensionally as U + and y + respectively. (See the discussion<br />
in Chapter 3 on nondimensionalisation.) This relationship is due <strong>to</strong> von<br />
Kármán [28]. <strong>The</strong> relationship is<br />
U + = 1<br />
κ ln Ey +<br />
(2.39)<br />
where κ is von Kármán’s constant. E is a function of wall roughness, and the<br />
smooth-wall value is used in this thesis. Log-law constants appear in Table<br />
2.3. <strong>The</strong> wall roughness constant, E is not <strong>to</strong> be confused with the E term<br />
in the ˜ε transport equation.<br />
Table 2.3: Log-law constants [83]<br />
κ 0.4187<br />
E 9.793<br />
Table 2.4 offers a qualitative appraisal of the behaviour of flow with respect<br />
<strong>to</strong> the nondimensional wall distance, y + . This highlights the qualitatively<br />
different behaviours exhibited by a fluid as a solid boundary is approached.<br />
<strong>The</strong> log law applies approximately where y + > 30. Where y + < 5, flow is<br />
characterised by Prandtl’s [54] hypothesis, that U + = y + very near the wall.<br />
<strong>The</strong> buffer layer is a region (5 < y + < 30) where neither of these assumptions<br />
holds. In specifying a low-Reynolds-number solution, it is important that the<br />
gradients nearest the wall fall within the viscous sublayer (y + < 5). In a high-<br />
Reynolds-number CFD treatment, it is important that the log-law boundary<br />
conditions are applied at a location where y + > 30.<br />
When used as a boundary condition on a high-Reynolds-number k-ε treat-
CHAPTER 2. TURBULENCE MODELS 28<br />
Table 2.4: <strong>Near</strong>-wall flow regimes adapted from [53]<br />
y + < 5 <strong>The</strong> viscous sublayer. <strong>The</strong> flow is essentially laminar.<br />
5 < y + < 30 <strong>The</strong> buffer layer. <strong>The</strong> log law overestimates U + .<br />
y + > 30 <strong>The</strong> log law region. <strong>The</strong> log law is valid.<br />
ment, the log law’s effect on the x momentum equation can be thought of as<br />
a source resulting from shear stress at the wall (τw). <strong>The</strong> relationship can be<br />
shown by considering the definition of U + . (See Chapter 3.)<br />
U + = 〈U〉<br />
Uτ =<br />
Uτ<br />
τw<br />
ρ<br />
(2.40)<br />
(2.41)<br />
Following Launder & Spalding [34], C 1/4<br />
µ k 1/2 may be taken as a velocity scale.<br />
<strong>The</strong> log law estimates the parameter Uτ by<br />
<strong>The</strong>refore,<br />
Uτ = U 2 τ<br />
Uτ<br />
Uτ = C 1/4<br />
µ k 1/2<br />
= τw/ρ 〈U〉<br />
=<br />
1/2 U +<br />
C 1/4<br />
µ k<br />
τw = ρC1/4 µ k1/2 〈U〉<br />
U +<br />
(2.42)<br />
(2.43)<br />
(2.44)<br />
<strong>The</strong> shear stress source in the equation of 〈U〉 is thus known from Equation<br />
2.44, Equation 2.39, and the previous iteration value of 〈U〉 at the point<br />
where the log law is applied. See Chapter 4 for a discussion of the numerical<br />
implementation of the log law.
CHAPTER 2. TURBULENCE MODELS 29<br />
In applying a wall-function boundary condition <strong>to</strong> k, the goal is not simply<br />
<strong>to</strong> prescribe a value of k at the near-wall cell node. Rather, better accuracy<br />
is achieved by applying sources <strong>to</strong> the k equation at the near-wall cell that<br />
represent cell-averaged production and dissipation terms (Pk and ε). Various<br />
methods exist for estimating these quantities. <strong>The</strong> Launder & Spalding [34]<br />
wall function is employed in this work. In this wall function,<br />
<br />
∂ 〈U〉<br />
Pk = τw<br />
∂y<br />
<br />
(k)<br />
ε = ρCµ<br />
2<br />
∂ <br />
〈U〉<br />
∂y<br />
τw<br />
(2.45)<br />
(2.46)<br />
<strong>The</strong> transport equation for ε does not make use of ε. Instead, ε is prescribed<br />
in the near-wall cell from k according <strong>to</strong> the mixing length hypothesis,<br />
C 3/4<br />
3/2 k<br />
µ = κy (2.47)<br />
ε<br />
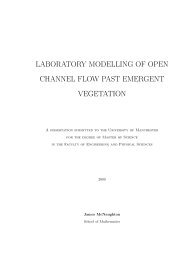
<strong>The</strong> log law appears in Figure 2.1, plotted <strong>to</strong>gether with DNS and experi-<br />
mental data at various Reynolds numbers. It can be seen that the log law<br />
provides reasonable agreement with DNS and experimental results beyond<br />
the buffer layer (y + > 30), and particularly when y + is not excessively large.<br />
<strong>The</strong> log law produces good results when applied as a boundary condition in<br />
a code whose near-wall cell extends <strong>to</strong> a height that fully encompasses the<br />
buffer layer. Since y + is a function of the flow rate as well as y, the optimum<br />
choice of near-wall cell size may be influenced by the flow rate considered.<br />
However, it is usually sufficient <strong>to</strong> choose a large enough near-wall cell <strong>to</strong><br />
fully encompass the buffer layer for the lowest flow rate anticipated.
CHAPTER 2. TURBULENCE MODELS 30<br />
U +<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
10 0<br />
10 1<br />
+<br />
+<br />
+<br />
+<br />
the log-law<br />
DNS: Reτ = 180 [30]<br />
DNS: Reτ = 395 [44]<br />
DNS: Reτ = 584 [44]<br />
◦ Exp.: Reτ = 708 [87]<br />
▽ Exp.: Reτ = 921 [47]<br />
+<br />
10 2<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
x +<br />
x xxx<br />
x<br />
x<br />
x<br />
x +<br />
x +<br />
+<br />
10 3<br />
y +<br />
10 4<br />
Exp.: Reτ = 1017 [47]<br />
+ Exp.: Reτ = 1655 [47]<br />
⋄ Exp.: Reτ = 2340 [11]<br />
× Exp.: Reτ = 4800 [11]<br />
△ Exp.: Reτ = 8150 [11]<br />
Figure 2.1: <strong>The</strong> log-law compared <strong>to</strong> experiments in channel flow
Chapter 3<br />
<strong>Channel</strong> <strong>Flow</strong><br />
<strong>Channel</strong> flow refers <strong>to</strong> an arrangement where fluid flows between two parallel<br />
walls. Consider walls that are a distance 2δ apart. <strong>Flow</strong> is driven by a<br />
pressure gradient in the x direction and solved from y = 0 at a wall <strong>to</strong> y = δ<br />
at the axis of symmetry between the two walls. <strong>The</strong> flow field is long in<br />
the third dimension, so that the flow is independent of z. <strong>The</strong> flow is also<br />
independent of x. Even in unsteady channel flow, the flow is taken <strong>to</strong> develop<br />
through time but not through the length of the flow direction, x.<br />
3.1 Governing Equations<br />
For ease of explanation, the RANS equations for continuity and conservation<br />
of momentum (Equations 2.4 and 2.5) may be expanded in<strong>to</strong> scalar form.<br />
31
CHAPTER 3. CHANNEL FLOW 32<br />
Removing all velocity gradients in x and z, this yields<br />
Continuity :<br />
X − momentum :<br />
Y − momentum :<br />
∂〈U〉<br />
∂t<br />
∂〈V 〉<br />
∂t<br />
+ 〈V 〉 ∂〈U〉<br />
∂y<br />
+ 〈V 〉 ∂〈V 〉<br />
∂y<br />
∂〈V 〉<br />
∂y<br />
1 ∂〈P 〉 ∂<br />
= − + ρ ∂x ∂y<br />
1 ∂〈P 〉 ∂<br />
= − + ρ ∂y ∂y<br />
= 0 (3.1)<br />
<br />
ν ∂〈U〉<br />
<br />
− ∂y<br />
∂〈uv〉<br />
(3.2)<br />
∂y<br />
<br />
∂〈V 〉<br />
ν − ∂y<br />
∂〈v2 〉<br />
(3.3)<br />
∂y<br />
A boundary condition affecting continuity, Equation 3.1 is that of zero flow<br />
through a solid boundary<br />
〈V 〉| y=0 = 0 (3.4)<br />
<strong>The</strong>refore, Equation 3.1 produces the result that V = 0 throughout the flow<br />
field. <strong>The</strong> momentum equations become<br />
X − momentum :<br />
∂〈U〉<br />
∂t<br />
<br />
1 ∂〈P 〉 ∂<br />
= − + ρ ∂x ∂y<br />
ν ∂〈U〉<br />
∂y<br />
Y − momentum : 0 = − 1 ∂〈P 〉<br />
ρ ∂y − ∂〈v2 〉<br />
∂y<br />
<br />
− ∂〈uv〉<br />
∂y<br />
(3.5)<br />
(3.6)<br />
It is notable, at this stage, that convection has been eliminated from the<br />
momentum equations.<br />
Equation 3.6 can be integrated with respect <strong>to</strong> y and the following boundary<br />
conditions applied<br />
v 2 y=0 = 0 (3.7)<br />
〈P 〉| y=0 = Pw<br />
(3.8)<br />
where Pw is pressure at the wall. Velocities, including turbulent fluctuations,<br />
are zero at the wall, so there are no pressure fluctuations. <strong>The</strong>refore, Pw<br />
is not shown as a mean value. Furthermore, since the flow is driven by a<br />
pressure gradient in x, the pressure at the wall must only vary as a function
CHAPTER 3. CHANNEL FLOW 33<br />
of x and time, hence Pw(x, t). Integrating Equation 3.6 with respect <strong>to</strong> y<br />
and applying the appropriate boundary conditions yields<br />
ρ v 2 + [〈P 〉 − Pw(x, t)] = 0 (3.9)<br />
Equation 3.9 can be differentiated with respect <strong>to</strong> x <strong>to</strong> give<br />
Thus<br />
∂〈P 〉<br />
∂x<br />
∂ 〈P 〉<br />
∂x<br />
is not a function of y.<br />
= ∂<br />
∂x Pw(x, t) (3.10)<br />
In the above analysis, continuity has served <strong>to</strong> simplify the momentum equa-<br />
tions, and y-momentum has yielded the insight that 〈P 〉 varies only in the x<br />
direction and in time. <strong>The</strong> remaining x-momentum equation is solved in the<br />
CFD code. Applying the EVM <strong>to</strong> Equation 3.5, this becomes:<br />
<br />
<br />
∂ 〈U〉 ∂ 〈P 〉 ∂ ∂ 〈U〉<br />
= −1 + (ν + νt)<br />
∂t ρ ∂x ∂y<br />
∂y<br />
(3.11)<br />
In summary, channel flow is governed by a single momentum equation con-<br />
taining terms for fluid acceleration, shear stress, and a driving pressure gra-<br />
dient. Furthermore, convection does not take place in any channel flow, since<br />
wall-normal velocity is zero throughout and all gradients in the wall-parallel<br />
direction are zero.<br />
3.1.1 <strong>The</strong> k-ε Model<br />
In channel flow, the transport equations in the k-ε model (Equations 2.16 &<br />
2.33) become<br />
k :<br />
˜ε : ∂ ˜ε<br />
∂t<br />
<br />
∂k ∂ ν+νt<br />
= ∂t ∂y σk<br />
<br />
∂ ν+νt ∂ ˜ε<br />
˜ε<br />
= + Cε1f1<br />
∂y σε ∂y<br />
k<br />
<br />
∂k<br />
∂y<br />
+ Pk − ε (3.12)<br />
<br />
˜ε 2<br />
Pk − Cε2f2 + E + Y (3.13)<br />
k
CHAPTER 3. CHANNEL FLOW 34<br />
E and Y in Equation 3.13 are unaffected by application <strong>to</strong> channel flow ge-<br />
ometry. (See Equations 2.27 & 2.34.) However, Pk (Equation 2.20) becomes<br />
3.1.2 <strong>The</strong> k-ω Model<br />
Pk = νt<br />
∂ 〈U〉<br />
<strong>The</strong> k-ω transport equations (Equations 2.35 & 2.38) for channel flow are<br />
k :<br />
ω : ∂ω<br />
∂t<br />
∂k<br />
∂t<br />
∂y<br />
<br />
∂ ν+νt ∂k<br />
= ∂y σkω ∂y<br />
<br />
∂ ν+νt ∂ω<br />
= ∂y σω ∂y<br />
with Pk as defined in Equation 3.14.<br />
3.2 <strong>Flow</strong> Characterisation<br />
2<br />
(3.14)<br />
<br />
+ Pk − ωkβ ∗ (3.15)<br />
+ γ <br />
ω<br />
Pk − βω k<br />
2 (3.16)<br />
Steady channel flow is usually characterised by a quantity called the friction<br />
velocity Reynolds number, Reτ. Unsteady channel flow is usually charac-<br />
terised by a time-mean Reτ and an amplitude of oscillation expressed as a<br />
proportion of this time-mean value. To explain Reτ, it is necessary <strong>to</strong> further<br />
analyze steady channel flow.<br />
For steady flow, ∂〈U〉<br />
∂t<br />
= 0 in Equation 3.11 and d〈U〉<br />
dy is not a partial derivative.<br />
In this case, the x-momentum equation (3.5) indicates a balance between the<br />
force acting on the fluid because of the driving pressure gradient and a shear<br />
force resulting from friction. <strong>The</strong> shear stress is a function of velocity, and it
CHAPTER 3. CHANNEL FLOW 35<br />
varies only in y. <strong>The</strong> shear stress may be expressed as<br />
so Equation 3.5 can be rewritten as<br />
d 〈U〉<br />
τ(y) = ρν − ρ 〈uv〉 (3.17)<br />
dy<br />
dτ<br />
dy<br />
It follows from Equation 3.18 that dτ<br />
= d 〈P 〉<br />
dx<br />
(3.18)<br />
dy is constant. Let τw be the shear stress<br />
at the wall, such that τ| y=0 = τw. Also, τ| y=δ = 0 since d〈U〉<br />
dy<br />
<br />
<br />
y=δ<br />
= 0 and<br />
〈uv〉| y=δ = 0. With these boundary conditions on τ, Equation 3.18 may be<br />
integrated <strong>to</strong> yield<br />
d 〈P 〉<br />
dx<br />
= −τw<br />
δ<br />
(3.19)<br />
Reτ may be defined from τw, the geometry of the channel, and the properties<br />
of the fluid according <strong>to</strong><br />
Reτ =<br />
<br />
δ τw<br />
ν ρ<br />
It is of interest, based on Equations 3.19 and 3.20, that only one of<br />
(3.20)<br />
d〈P 〉<br />
, τw, dx<br />
or Reτ must be specified in order <strong>to</strong> completely define the flow. Usually, Reτ<br />
is the quoted parameter.<br />
Another Reynolds number is the bulk Reynolds number, based on average<br />
velocity<br />
Re♭ =<br />
where U indicates a spatial average.<br />
U (2δ)<br />
ν<br />
A further Reynolds number is that based on free stream velocity<br />
Re0 = U0δ<br />
ν<br />
(3.21)<br />
(3.22)
CHAPTER 3. CHANNEL FLOW 36<br />
Re♭ and Re0 are often quoted by experimentalists, who favour these quanti-<br />
ties because they can be readily and directly measured.<br />
3.3 Nondimensionalisation<br />
Viscous velocity and length scales can be defined such that the Reynolds<br />
number based on these scales is equal <strong>to</strong> 1. <strong>The</strong> velocity scale is<br />
and the length scale is<br />
Uτ =<br />
τw<br />
ρ<br />
<br />
ρ<br />
δv = ν<br />
τw<br />
<strong>The</strong> friction velocity Reynolds number may be expressed as<br />
Reτ = Uτδ<br />
ν<br />
= δ<br />
δv<br />
(3.23)<br />
(3.24)<br />
(3.25)<br />
<strong>Flow</strong> variables may be nondimensionalised by the viscous scales in Equations<br />
3.24 and 3.23. By convention, U + , the nondimensional average U velocity is<br />
not shown with braces – 〈〉.<br />
y + = y<br />
δν<br />
<br />
Uτ<br />
= y<br />
ν<br />
U + = 〈U〉<br />
Uτ<br />
〈uv〉 + = 〈uv〉<br />
U 2 τ<br />
k + = k<br />
U 2 τ<br />
(3.26)<br />
(3.27)<br />
(3.28)<br />
(3.29)
CHAPTER 3. CHANNEL FLOW 37<br />
u 2 + = 〈u 2 〉<br />
U 2 τ<br />
v 2 + = 〈v 2 〉<br />
U 2 τ<br />
Sometimes the driving pressure gradient is nondimensionalised by<br />
<br />
P + x =<br />
<br />
∂〈P 〉<br />
∂x<br />
2<br />
(Uτ ) ρ<br />
δ<br />
(3.30)<br />
(3.31)<br />
(3.32)<br />
Note that 〈u 2 〉 and 〈v 2 〉 may be nondimensionalised as 〈u2 〉<br />
k<br />
also notable that the definitions of Reτ and y + give<br />
y + |y=δ = Reτ<br />
3.4 Steady <strong>Channel</strong> <strong>Flow</strong> Data<br />
and 〈v2 〉<br />
. It is<br />
k<br />
(3.33)<br />
Based on the wealth of experimental and DNS results available concerning<br />
the behaviour of steady channel flows, a set of empirical profiles have been<br />
developed <strong>to</strong> obtain estimates of U + , − 〈uv〉 + , k + , 〈u 2 〉 + , and 〈v 2 〉 + . <strong>The</strong>se<br />
results are compared <strong>to</strong> DNS and experimental data in the following sections.<br />
Much of the data were found in the AGARD Aerospace Database 1 . <strong>The</strong><br />
contribu<strong>to</strong>rs of specific data sets are cited in the graph legends 2 .<br />
1 Advisory Group for Aerospace Research and Development, France<br />
2 Another excellent source of experimental information may be found at<br />
http://www.efluids.com. Furthermore, at http://<strong>to</strong>rroja.dmt.vpm.es Dr. Javier Jimenez<br />
(School of Aeronautics, University of Madrid) has published full flow fields for channel<br />
flow at Reτ = 180 and Reτ = 550
CHAPTER 3. CHANNEL FLOW 38<br />
It is intended that these profiles will be used as an aid in developing new<br />
turbulence models or numerical approaches. One particular application is as<br />
a means of setting initial conditions or inlet boundary conditions for a code,<br />
<strong>to</strong> facilitate easier convergence during debugging. A further application is<br />
<strong>to</strong> apply these relations within the code as a means of verifying the internal<br />
calculations of the turbulence model.<br />
<strong>The</strong> profiles shown below are designed <strong>to</strong> match fully turbulent flow and also<br />
laminar/turbulent transitional flow. <strong>The</strong> profiles are reasonably accurate, as<br />
compared <strong>to</strong> the variation generally seen between different sets of experimen-<br />
tal results. It is notable that, in general, flow parameters are strong functions<br />
of Reynolds number. While experimental and DNS results are only available<br />
at a selection of discrete Reynolds numbers, these empirical profiles offer<br />
a means of interpolation and allow codes <strong>to</strong> be validated at intermediate<br />
Reynolds numbers.<br />
One limitation of these emperical profiles is that they do not adequately cap-<br />
ture the limiting shape of turbulence quantities as y + → 0. <strong>The</strong> principal<br />
concern in developing the profiles was <strong>to</strong> accurately account for the magni-<br />
tude and location of peak values. <strong>The</strong>refore, separate near-wall profiles are<br />
also presented.<br />
〈u 2 〉 + and 〈v 2 〉 + are found by multiplying empirical profiles for 〈u2 〉 +<br />
〈v 2 〉 +<br />
k +<br />
k +<br />
and<br />
by the empirical profile for k + . <strong>The</strong> reason why 〈u 2 〉 + and 〈v 2 〉 + are<br />
normalised by k + rather than being fit directly is that this process reduces the<br />
Reynolds number dependence of the resulting empirical profiles, with most<br />
of the Reynolds number dependence in 〈u 2 〉 + and 〈v 2 〉 + being accounted for<br />
in k + . <strong>The</strong> complexity of the empirical profiles is therefore reduced.
CHAPTER 3. CHANNEL FLOW 39<br />
3.4.1 Empirical Profile for U +<br />
Reichardt’s log law [58] states that<br />
U + = 1<br />
κ ln 1.0 + 0.4y +<br />
<br />
+7.8 1 − exp − y+<br />
<br />
+ y<br />
− exp −<br />
11 11<br />
y+<br />
<br />
3<br />
(3.34)<br />
This is plotted against experimental and DNS data in Figure 3.1. Reichardt’s<br />
law follows DNS results very closely near the wall. As y + increases, Re-<br />
ichardt’s law approaches the log law, while experimental values of U + tend<br />
<strong>to</strong> fall above the log law for high y + .<br />
3.4.2 Empirical Profile for − 〈uv〉 +<br />
Based on Reichardt’s law, a profile can be derived for − 〈uv〉 + . This was<br />
originally done by Alexander Davroux and Dominique Laurence at Electricité<br />
de France.<br />
dτ<br />
dy is a constant, τ| y=0 = τw and τ| y=δ = 0. <strong>The</strong>refore, the equation for τ (y)<br />
in a channel is<br />
τ (y) = τw<br />
<br />
1 − y<br />
<br />
δ<br />
This can be inserted in<strong>to</strong> Equation 3.17 <strong>to</strong> give<br />
− 〈uv〉 = τw<br />
ρ<br />
In nondimensional form, this becomes<br />
<br />
1 − y<br />
<br />
δ<br />
− 〈uv〉 + <br />
= 1 − y<br />
<br />
δ<br />
−<br />
− ν dU<br />
dy<br />
dU +<br />
dy +<br />
(3.35)<br />
(3.36)<br />
(3.37)
CHAPTER 3. CHANNEL FLOW 40<br />
Substituting Equation 3.34 in<strong>to</strong> Equation 3.37 gives<br />
− 〈uv〉 + =<br />
<br />
1 − y<br />
<br />
0.976<br />
−<br />
δ 1 + 0.4y +<br />
<br />
<br />
+ 0.709 exp − y+<br />
<br />
11<br />
<br />
−0.709 exp − y+<br />
<br />
+ 0.234y<br />
3<br />
+ <br />
∗ exp − y+<br />
<br />
3<br />
in<strong>to</strong> Equation 3.38 gives<br />
− 〈uv〉 + = 1 − y+<br />
<br />
0.976<br />
−<br />
Reτ 1 + 0.4y +<br />
<br />
<br />
− 0.709 exp − y+<br />
<br />
11<br />
+ 0.709 − 0.234y + <br />
exp − y+<br />
<br />
3<br />
Substituting y+<br />
Reτ<br />
for y<br />
δ<br />
(3.38)<br />
(3.39)<br />
Figure 3.2 shows the performance of Reichardt’s law when used <strong>to</strong> calcu-<br />
late − 〈uv〉 + by the above technique. One limitation of this profile is that<br />
− 〈uv〉 + < 0 for low values of y + , particularly when Reτ is small. To im-<br />
prove upon this, the (0.709 − 0.234y + ) component of Equation 3.39 can be<br />
modified <strong>to</strong> alter the behaviour at low y + <br />
. Furthermore, can be<br />
0.976<br />
1+0.4y +<br />
adjusted so that the profile produces a value of zero when y + = 0. <strong>The</strong> result<br />
of these manipulations is<br />
− 〈uv〉 + = 1 − y+<br />
<br />
1<br />
−<br />
Reτ 1 + 0.4y +<br />
<br />
+ 0.709 − 0.18y + <br />
exp − y+<br />
<br />
3<br />
<br />
− 0.709 exp<br />
Figure 3.3 plots Equation 3.40 at various values of Reτ.<br />
3.4.3 Empirical Profile for k +<br />
− y+<br />
11<br />
<br />
(3.40)<br />
<strong>The</strong> following profile for k + is adapted from a profile originally fitted by<br />
Alexander Davroux and Dominique Laurence at Electricité de France. <strong>The</strong>
CHAPTER 3. CHANNEL FLOW 41<br />
profile is<br />
k + =<br />
1<br />
Reτ 2<br />
0.07 + 0.05<br />
∗<br />
1600<br />
y + <br />
2<br />
∗ exp − y+<br />
<br />
7<br />
<br />
+4.5 1 − exp − y+<br />
+ −1 <br />
4y<br />
+ 1<br />
20 Reτ<br />
<br />
+ 2 <br />
y<br />
∗ 1 − exp −<br />
3<br />
Figure 3.4 shows this profile for k + plotted against DNS results.<br />
(3.41)<br />
Table 3.1 offers qualitative descriptions of the contributions of the various<br />
terms in Equation 3.41. <strong>The</strong> final term ensures that k + = 0 at the wall, but<br />
the shape of the profile in the very near-wall region does not closely match<br />
DNS data. An analysis of the near-wall behaviour of turbulence quantities<br />
will follow.<br />
Table 3.1: Qualitative behaviour of terms in Equation 3.41<br />
<br />
Reτ<br />
1600<br />
<br />
0.07 + 0.05<br />
<br />
4.5 1 − exp<br />
<br />
∗ (y + ) 2 <br />
∗ exp − y+<br />
<br />
7<br />
<br />
4y + −1<br />
+ 1<br />
− y+<br />
20<br />
<br />
1 − exp −<br />
y +<br />
3<br />
Reτ<br />
2 <br />
3.4.4 Empirical Profile for u 2 +<br />
<strong>The</strong> following formula for 〈u2 〉 +<br />
k +<br />
fits the peak value of k +<br />
helps <strong>to</strong> roughly capture the curve<br />
at high Reynolds numbers<br />
forces a value of zero at the wall<br />
was adapted from a profile fitted by Alexan-<br />
der Davroux and Dominique Laurence at Electricité de France.
CHAPTER 3. CHANNEL FLOW 42<br />
〈u 2 〉 +<br />
k +<br />
+ 1/4<br />
y<br />
= 1.46 − 0.542 ∗ +<br />
Reτ<br />
⎛<br />
y +<br />
⎜<br />
⎝<br />
1.5 +<br />
<br />
7<br />
2 y +<br />
7<br />
⎞<br />
⎟<br />
⎠ (3.42)<br />
Figure 3.5 shows the profile for 〈u 2 〉 + obtained by multiplying Equation 3.42<br />
by Equation 3.41. This is plotted against DNS results.<br />
Table 3.2 offers qualitative descriptions of the contributions of the various<br />
terms in Equation 3.42.<br />
Table 3.2: Qualitative behaviour of terms in Equation 3.42<br />
„ y +<br />
«<br />
<br />
7<br />
“ ”<br />
y + 2<br />
1.5+ 7<br />
<br />
y + 1/4<br />
−0.542 ∗<br />
Reτ<br />
fits the peak value of 〈u2 〉 +<br />
k +<br />
shifts the curve at higher y + <strong>to</strong> account for some<br />
Reynolds number dependence of 〈u2 〉 +<br />
3.4.5 Empirical Profile for v 2 +<br />
This profile for 〈v2 〉 +<br />
k +<br />
was originally fitted by Alexander Davroux and Do-<br />
minique Laurence at Electricité de France. <strong>The</strong> profile is<br />
〈v 2 〉 +<br />
k +<br />
where<br />
=<br />
<br />
y + 2<br />
<br />
<br />
<br />
+<br />
20<br />
y<br />
0.08 ∗ 2 + 0.8 ∗ 1λR + λR ∗ 0.06 ∗ + 1<br />
y +<br />
Reτ<br />
2 + 20<br />
<br />
+ 2 <br />
+ 2<br />
−1<br />
y y<br />
∗ 1 − exp −<br />
∗ 1 − exp −<br />
(3.43)<br />
20<br />
3<br />
<br />
λR = exp − 100<br />
<br />
Reτ<br />
k +
CHAPTER 3. CHANNEL FLOW 43<br />
Figure 3.6 shows the resulting profile for 〈v 2 〉 + plotted against DNS results.<br />
3.4.6 <strong>Near</strong>-<strong>Wall</strong> Behaviour<br />
Various researchers have analysed the limiting behaviour of turbulence pa-<br />
rameters near a wall [4, 8, 22, 39, 43, 81]. Following Hanjalic & Launder [22],<br />
fluctuating velocity components can be represented in the following way as<br />
y → 0.<br />
u + rms = a ∗ y + y +<br />
+ O<br />
2 <br />
v + rms = b ∗ y + <br />
2 y +<br />
+ O<br />
3 <br />
(3.44)<br />
where a and b are constants, and u + rms and v + rms are root-mean-square aver-<br />
aged values.<br />
<strong>The</strong>se relationships are supported by the DNS results of Kim et. al. [30].<br />
As Suga [77] points out:<br />
2<br />
u + 2<br />
= a ∗ y + <br />
2 y +<br />
+ O<br />
4 <br />
2<br />
v + 2<br />
= b ∗ y + <br />
4 y +<br />
+ O<br />
6 <br />
〈uv〉 + = 〈ab〉 ∗ y + <br />
3 y +<br />
+ O<br />
4 <br />
(3.45)<br />
Thus the near-wall behaviour of 〈u 2 〉 is expected <strong>to</strong> be dominated by a curve
CHAPTER 3. CHANNEL FLOW 44<br />
of the form (y + ) 2 ; 〈v 2 〉 by (y + ) 4 ; -〈uv〉 by (y + ) 3 . Specifically, as y + → 0,<br />
where,<br />
〈u2 〉 +<br />
(y + 2<br />
)<br />
→ A<br />
〈v2 〉 +<br />
(y + 4<br />
)<br />
→ B<br />
− 〈uv〉 +<br />
(y + 3<br />
)<br />
→ C (3.46)<br />
A = a 2<br />
B = b 2<br />
C = − 〈ab〉 (3.47)<br />
Based on the definition of k + , it can be shown that [22]<br />
where γ is a constant in,<br />
k + = 1 2<br />
a<br />
2<br />
+ γ 2 ∗ y + <br />
2 y +<br />
+ O<br />
3 <br />
2<br />
w = γ 2 ∗ y + <br />
2 y +<br />
+ O<br />
4 <br />
Thus, k + is dominated by (y + ) 2 near the wall and, as y + → 0,<br />
where,<br />
(3.48)<br />
(3.49)<br />
k +<br />
(y + 2 → D (3.50)<br />
)<br />
D = 1 2<br />
a<br />
2<br />
+ γ 2<br />
Figure 3.7 shows the near-wall behaviours of 〈u2 〉 +<br />
(3.51)<br />
(y + ) 2 , 〈v2 〉 +<br />
(y + ) 4 , −〈uv〉+<br />
(y + ) 3 , and k+<br />
(y + ) 2 ,<br />
respectively. <strong>The</strong>se graphs are expected <strong>to</strong> tend <strong>to</strong> horizontal lines as y + → 0.
CHAPTER 3. CHANNEL FLOW 45<br />
<strong>The</strong> profiles quoted above for 〈u 2 〉 + , 〈v 2 〉 + , − 〈uv〉 + , and k + near the wall do<br />
not adequately satisfy the relationships in 3.46 and 3.50. <strong>The</strong>refore, in the<br />
interest of completeness, values of A, B, C, and D are found as functions of<br />
Reynolds number based on DNS results 3 . [30, 44]<br />
<strong>The</strong> functions are:<br />
A = 1.060 × 10 −4 Reτ + (0.1107)<br />
B = 1.757 × 10 −7 Reτ + 4.546 × 10 −5<br />
C = 9.005 × 10 −7 Reτ + 5.855 × 10 −4<br />
D = 9.362 × 10 −5 Reτ + (0.0680) (3.52)<br />
<strong>The</strong> Reynolds-number dependent near-wall proportionalities indicated above<br />
are consistent with the DNS results of An<strong>to</strong>nia & Kim [4], who analyzed<br />
the near-wall behaviour of u + , v + , − 〈uv〉 + , and other parameters at two<br />
Reynolds numbers.<br />
3.5 Local Nondimensionalisation<br />
When examining computed results, it is often more straightforward <strong>to</strong> nor-<br />
malise y by k, rather than by τw. In a complex, multidimensional mesh, it is<br />
not possible, in general, <strong>to</strong> relate modelled flow parameters <strong>to</strong> friction at a<br />
corresponding point along the wall.<br />
When y is normalised by k, the cus<strong>to</strong>mary notation is y ∗ . <strong>The</strong> method of<br />
3 It is notable that the relationships A = a 2 , B = b 2 , and C = 〈ab〉 do not imply<br />
C = √ AB.
CHAPTER 3. CHANNEL FLOW 46<br />
obtaining y ∗ is<br />
y ∗ can be related <strong>to</strong> y + by<br />
y ∗ = y√ k<br />
ν<br />
Likewise, 〈U〉 can be normalised by k.<br />
(3.53)<br />
y ∗ = y +√ k + (3.54)<br />
U ∗ = 〈U〉<br />
√ k<br />
U ∗ =<br />
U +<br />
√ k +<br />
(3.55)<br />
(3.56)<br />
y + is plotted against y ∗ for various values of Reτ in Figure 3.8. U + and U ∗ at<br />
various Reynold’s numbers are plotted in Figure 3.9. It can be seen that U +<br />
and U ∗ can differ significantly. This may be caused by the fact that k + is not<br />
increasing mono<strong>to</strong>nically. An interesting feature, visible in Figure 3.9, is that<br />
U ∗ approaches a constant as y → 0. This happens because, as y → 0, U +<br />
becomes proportional <strong>to</strong> y + and k + becomes proportional <strong>to</strong> (y + ) 2 . Thus,<br />
U +<br />
√ k + = U ∗ approaches a constant.<br />
Another choice of variable against which <strong>to</strong> normalise y and U is 〈v 2 〉. 〈v 2 〉<br />
has the same units as k. Since most of the local variability of k results from<br />
turbulent fluctuations in the mean flow direction (〈u 2 〉), local nondimension-<br />
alisation based on 〈v 2 〉 may be expected <strong>to</strong> offer smoother profiles. We can<br />
define<br />
y ∗<br />
v 2 = y 〈v 2 〉<br />
ν<br />
U ∗ 〈U〉<br />
v2 = =<br />
〈v2 〉<br />
= y +<br />
<br />
〈v2 〉 +<br />
U +<br />
<br />
〈v 2 〉 +<br />
(3.57)<br />
(3.58)
CHAPTER 3. CHANNEL FLOW 47<br />
y + is plotted against y ∗<br />
v 2 for various values of Reτ in Figure 3.10. <strong>The</strong>re is<br />
reasonable agreement between y + and y ∗<br />
v 2. U + and U ∗<br />
v 2 at various Reynold’s<br />
numbers are plotted in Figure 3.11. <strong>The</strong> 〈v 2 〉 normalising approach suffers<br />
from the fact that 〈v 2 〉 + tends <strong>to</strong> zero as y → 0 faster than U + does, so that<br />
U ∗<br />
v 2 becomes large. As y → 0, U + is expected <strong>to</strong> become proportional <strong>to</strong> y +<br />
and 〈v2 〉 + becomes proportional <strong>to</strong> (y + ) 4 U , so +<br />
√<br />
〈v2 +<br />
〉<br />
1<br />
y + .<br />
becomes proportional <strong>to</strong>
Chapter 4<br />
Numerical Implementation<br />
This work uses a code derived from PASSABLE. 1 Prior <strong>to</strong> this work, the<br />
code was modified for periodic flow by Addad [1]. A finite volume method<br />
is used <strong>to</strong> discretise the equations governing the flow. More information on<br />
the numerical implementation of CFD can be found in books. [83],[20]<br />
4.1 <strong>The</strong> Mesh<br />
As discussed in Chapter 3, the flow field is a one-dimensional expanse with<br />
a wall at y = 0 and symmetry at y = δ. This is modelled as a channel ’slice’<br />
of finite thickness. <strong>The</strong> slice is divided in<strong>to</strong> finite volumes, called ‘cells’.<br />
<strong>The</strong> slice is one cell thick in x and is divided in y according <strong>to</strong> the degree<br />
of numerical accuracy required. This is shown schematically in Figure 4.1.<br />
<strong>The</strong> actual grid used for low-Reynolds-number solutions within this work<br />
1 PArabolic Solution Scheme <strong>Applied</strong> <strong>to</strong> Boundary Layer Equations<br />
48
CHAPTER 4. NUMERICAL IMPLEMENTATION 49<br />
contains 98 cells. Each cell is 5% larger than its wall-facing neighbour. This<br />
geometrical feature is referred <strong>to</strong> as an expansion fac<strong>to</strong>r of 1.05.<br />
†<br />
d<br />
y<br />
U P<br />
symmetry<br />
nodes<br />
vertexes<br />
wall<br />
Figure 4.1: <strong>The</strong> low-Reynolds-number grid<br />
Within each cell is a ‘node’, where parameters associated with the cell are<br />
tracked. Cell boundaries, called ‘vertexes’, are centred between nodes. Ex-<br />
ceptions exist at y = 0 and y = δ. At y = δ, a half-cell exists, with the<br />
final node placed at the symmetry plane. At y = 0, a node is placed at<br />
the wall with no associated cell. This represents a new modification <strong>to</strong> the<br />
PASSABLE code, allowing easier implementation of wall function boundary<br />
conditions. Previously, the code employed a similar mesh style at y = 0 <strong>to</strong><br />
the mesh at y = δ.<br />
Table 4.1 shows the notation used in this thesis <strong>to</strong> refer <strong>to</strong> discretised values.<br />
Values at vertexes are not s<strong>to</strong>red in the code, but may be calculated via<br />
linear interpolation from adjacent nodal values.
CHAPTER 4. NUMERICAL IMPLEMENTATION 50<br />
Table 4.1: <strong>The</strong> notation for discretised values<br />
current node subscript P<br />
node above subscript N<br />
node below subscript S<br />
vertex above subscript n<br />
vertex below subscript s<br />
previous time step superscript t − 1<br />
cell height ∆yp<br />
node-<strong>to</strong>-node dist. ∆yn,s<br />
time step ∆t<br />
4.2 Volume Integral Form<br />
<strong>The</strong> finite volume discretisation method is convenient because quantities are<br />
conserved within each finite volume and are therefore necessarily conserved<br />
throughout the flow field. In order <strong>to</strong> employ the finite volume method, it is<br />
first necessary <strong>to</strong> integrate the differential equations governing the flow with<br />
respect <strong>to</strong> volume. <strong>The</strong> volume-integrated forms of the equations are pre-<br />
sented below. Note that, in channel flow geometry, integrating with respect<br />
<strong>to</strong> volume is equivalent <strong>to</strong> integrating with respect <strong>to</strong> y.<br />
〈U〉 :<br />
k :<br />
˜ε :<br />
∂〈U〉<br />
∂k<br />
∂t<br />
∂〈P 〉<br />
∂〈U〉<br />
dy + (ν + νt) ∂x ∂y<br />
<br />
ν+νt ∂k<br />
∂t dy = − 1<br />
ρ<br />
dy =<br />
<br />
∂ ˜ε dy = ∂t<br />
ω : ∂ω dy = ∂t<br />
− Cε2f2<br />
ν+νt<br />
σk<br />
<br />
ν+νt ∂ ˜ε<br />
σω<br />
σε<br />
<br />
˜ε 2<br />
(4.1)<br />
∂y + Pkdy − εdy (4.2)<br />
∂y + <br />
˜ε<br />
Cε1f1 Pkdy k<br />
<br />
dy + k<br />
Edy + Y dy (4.3)<br />
<br />
∂ω<br />
∂y + γ <br />
ω Pkdy − k<br />
βω2dy (4.4)
CHAPTER 4. NUMERICAL IMPLEMENTATION 51<br />
Before performing any dimensional analysis on the above equations, one must<br />
actually integrate with respect <strong>to</strong> volume, applying limits of 0 <strong>to</strong> 1 on the in-<br />
tegrations in x and z. It is also notable that the PASSABLE code uses a grid<br />
that is unit length in z but not unit length in x (∆x = 1). This detail must<br />
be remembered when working with the code, particularly when specifying<br />
volume-integrated source terms. Furthermore, in the PASSABLE implemen-<br />
tation, Equations 4.1-4.4 are multiplied through by ρ. This convention is<br />
maintained in the subgrid.<br />
4.3 Discretisation<br />
<strong>The</strong> process of discretisation involves approximating the governing differen-<br />
tial equations by algebraic equations so that they can be solved by a com-<br />
puter.<br />
A fully implicit scheme is used in this work. This means that the previous<br />
time-step values of adjacent nodes are not used. In contrast, a fully explicit<br />
scheme would use the previous time-step values, but not the current time-<br />
step values of adjacent nodes. <strong>The</strong> fully implicit method ensures that the<br />
solution can converge at large time steps.<br />
Central differencing is used in this work <strong>to</strong> approximate derivatives. Other<br />
differencing schemes include PLDS 2 [51] and QUICK 3 [37]. <strong>The</strong>se alternative<br />
schemes involve higher-order approximations. <strong>The</strong> QUICK scheme is also<br />
upstream-biased, in the sense that it makes use of more information on the<br />
2 Power-Law Differencing Scheme<br />
3 Quadratic Upstream Interpolation for Convective Kinetics
CHAPTER 4. NUMERICAL IMPLEMENTATION 52<br />
upstream side of the derivative than on the downstream side. (<strong>The</strong> scheme is<br />
influenced by the local direction of 〈U〉.) This is physically reasonable, since<br />
quantities are convected downstream. Because of the simple geometry and<br />
the lack of convective terms in the governing equations, central differencing<br />
was felt <strong>to</strong> be an effective choice in this work.<br />
Within the CFD code, a system of algebraic equations is compiled <strong>to</strong> repre-<br />
sent each of the momentum equations or transport equations <strong>to</strong> be solved.<br />
A set of algebraic equations representing one differential equation is solved<br />
using an iterative procedure 4 before the next differential equation is treated.<br />
<strong>The</strong> various differential equations are coupled <strong>to</strong> one-another, so the entire<br />
process of solving each differential equation in sequence must be repeated<br />
iteratively until the overall solution converges. 5<br />
<strong>The</strong> discretised momentum equation for 〈U〉 is<br />
where<br />
〈U〉 P − 〈U〉 t−1<br />
P<br />
∆t<br />
∆yp = − 1 ∂ 〈P 〉<br />
ρ<br />
<br />
∂ 〈U〉<br />
∂y<br />
<br />
∂ 〈U〉<br />
∂x ∆yp + (ν + νt) n<br />
<br />
∂ 〈U〉<br />
− (ν + νt) s<br />
n<br />
∂y<br />
= 〈U〉 N − 〈U〉 P<br />
∆yn<br />
s<br />
<br />
∂ 〈U〉<br />
∂y<br />
n<br />
(4.5)<br />
(4.6)<br />
∂y<br />
=<br />
s<br />
〈U〉 P − 〈U〉 S<br />
∆ys<br />
(4.7)<br />
and (ν + νt) n and (ν + νt) s are found using linear interpolation between<br />
nodes.<br />
4 <strong>The</strong> iterative solution procedure used for the solution of algebraic equations in this<br />
study is the Tri-Diagonal Matrix Algorithm (TDMA). This procedure is appropriate <strong>to</strong><br />
parabolic systems of equations.<br />
5 An iterative solution algorithm is said <strong>to</strong> be converged when the solution that it<br />
produces is observed <strong>to</strong> undergo no significant change with successive iterations.
CHAPTER 4. NUMERICAL IMPLEMENTATION 53<br />
<strong>The</strong> discretised transport equation for k is<br />
kP − k t−1<br />
P<br />
∆t ∆yp =<br />
<br />
ν + νt<br />
<br />
∂k<br />
∂y<br />
where<br />
σk<br />
n<br />
+Pk∆yp − ε∆yp<br />
Pk = νt<br />
n<br />
〈U〉n − 〈U〉 s<br />
∆yp<br />
and 〈U〉 n and 〈U〉 s are interpolated values.<br />
<br />
ν + νt<br />
−<br />
2<br />
σk<br />
s<br />
<br />
∂k<br />
∂y s<br />
(4.8)<br />
(4.9)<br />
Discretised transport equations for ˜ε and ω can be found in a similar manner.<br />
Some further equations whose discretised forms are noteworthy are<br />
⎛<br />
⎞2<br />
∂〈U〉 ∂〈U〉<br />
− ∂y<br />
∂y<br />
E = 2ννt ⎝ n<br />
s ⎠<br />
∆yp<br />
⎛<br />
ˆε = 2ν ⎝<br />
√k n<br />
−<br />
∆yp<br />
√k s<br />
⎞<br />
⎠<br />
2<br />
(4.10)<br />
(4.11)<br />
Thus, an algebraic equation may be generated for each node P . <strong>The</strong> discre-<br />
tised differential equations are expressed in the code in the form<br />
(AP − SP ) φp = ANφN + ASφS + SU<br />
(4.12)<br />
where φ is the unknown parameter from the original differential equation.<br />
AP , AN and AS are coefficients on nodal values. Previous time step infor-<br />
mation is included as a source. <strong>The</strong> source is split in<strong>to</strong> two terms, SU and<br />
SP φp for reasons of numerical stability. It is advantageous <strong>to</strong> have a large<br />
coefficient on φp, so negative quantities are sometimes moved from SU in<strong>to</strong><br />
SP (dividing by φp) <strong>to</strong> artificially increase this coefficient. At other times,<br />
sources involve a product of φp, and the use of SP is a natural choice.
CHAPTER 4. NUMERICAL IMPLEMENTATION 54<br />
<strong>The</strong> fully implicit scheme also requires information on φ t−1<br />
p . This does not<br />
appear explicitly in Equation 4.12 because it is included in the source term,<br />
SU.<br />
As an example of the expressions of the coefficients presented in Equation<br />
4.12, the coefficients on 〈U〉 are<br />
AN = (ν + νt) n<br />
∆yn<br />
AS = (ν + νt) s<br />
∆ys<br />
AP = (ν + νt) n<br />
∆yn<br />
= AN + AS<br />
SP = − 1<br />
∆t ∆yp<br />
SU =<br />
<br />
〈U〉 t−1<br />
P<br />
∆t<br />
<br />
+ (ν + νt) s<br />
∆ys<br />
∆yp −<br />
4.4 Boundary Conditions<br />
1<br />
ρ<br />
<br />
∂ 〈P 〉<br />
∆yp<br />
∂x<br />
(4.13)<br />
At y = δ, a symmetry boundary condition is employed. <strong>The</strong> governing<br />
equations are not solved at y = δ. Values of 〈U〉, k, ˜ε, and ω are copied <strong>to</strong><br />
the symmetry plane node from the nearest adjacent node. At this adjacent<br />
node, the coefficients are adjusted as follows for each of 〈U〉, k, ˜ε, and ω:<br />
AN = 0<br />
AP = AS (4.14)<br />
This ensures that all gradients in y are zero at the symmetry plane.<br />
At the wall, velocities are zero. This creates large gradients in the near-
CHAPTER 4. NUMERICAL IMPLEMENTATION 55<br />
wall region. Because CFD uses discretisation, the s<strong>to</strong>rage and computational<br />
requirements associated with accurately representing large gradients are high.<br />
This results in a great potential for computation-saving approaches at the<br />
wall. Many methods exist for applying wall boundary conditions <strong>to</strong> CFD<br />
codes, and these may be model-specific. Boundary conditions on the wall<br />
are discussed below.<br />
4.4.1 <strong>Wall</strong> Boundaries on k-ε<br />
In the low-reynolds-number standard k-ε model, ˜ε is defined as being equal<br />
<strong>to</strong> zero at the wall. Furthermore, k = 0 at the wall, arising from the fact that<br />
k represents turbulent kinetic energy and all velocities, including turbulent<br />
fluctuations, are zero at the wall. In the low-Reynolds-number model, these<br />
quantities are simply prescribed <strong>to</strong> be zero at the wall. Transport equations<br />
are not solved at the wall, but are solved in the wall-adjacent cell. Because<br />
of the large gradients involved, finer grid resolution is required near the wall,<br />
as shown in Figure 4.1.<br />
4.4.2 <strong>Wall</strong> Boundaries on k-ω<br />
As with the k-ε model, 〈U〉 = 0 and k = 0 at the wall, and transport<br />
equations may be solved up <strong>to</strong> the wall-adjacent cell. However, ω → ∞ as<br />
y → 0, so it is not numerically possible <strong>to</strong> specify ω at the wall. Wilcox [89]<br />
notes that the limiting behaviour of ω at the wall is<br />
ω → 6ν<br />
βy 2 as y → 0 (4.15)
CHAPTER 4. NUMERICAL IMPLEMENTATION 56<br />
Thus, while ω is infinite at the wall, finite values may be specified near the<br />
wall according <strong>to</strong> Equation 4.15. However, the gradient of ω near the wall<br />
is excessively large (approximately two orders of magnitude greater than<br />
gradients on ˜ε), so it is not practical <strong>to</strong> solve the ω transport equation in the<br />
near wall region. <strong>The</strong> approach recommended by Wilcox [91] is <strong>to</strong> specify<br />
ω according <strong>to</strong> the limiting behaviour suggested in Equation 4.15 within the<br />
first 7 <strong>to</strong> 10 cells, where y + < 2.5. Transport equations on 〈U〉 and k use<br />
specified values of ω in this region, and the transport equation of ω is only<br />
solved outside of this very near-wall region.<br />
4.4.3 <strong>The</strong> Logarithmic Law of the <strong>Wall</strong><br />
A wall function mesh incorporates a near-wall cell that is large enough <strong>to</strong><br />
fully encompass the buffer layer and extend in<strong>to</strong> the region where the log<br />
law is valid. This is shown schematically in Figure 4.2. Because flows of low<br />
Reynolds number are considered in this thesis, the buffer layer is very large.<br />
<strong>The</strong> near-wall node location was set <strong>to</strong> y/δ = 20% or y + = 36.0. <strong>The</strong> main<br />
grid of PASSABLE uses vertexes centred between nodes, so the near-wall<br />
node is positioned far from the centre of its cell. <strong>The</strong> remaining grid was<br />
made up of 18 nodes. An expansion fac<strong>to</strong>r of 1.00 was used for these 18 cells.<br />
<strong>The</strong> <strong>to</strong>tal number of grid cells used with wall functions was thus much less<br />
than with the low-Reynolds-number solution.<br />
Numerically, the log law is implemented by severing the link <strong>to</strong> the wall<br />
in the near-wall cell, and then manipulating the 〈U〉, k, ε source terms in<br />
the near-wall cell <strong>to</strong> reflect the log law. A full discussion of the numerical<br />
implementation of log laws in CFD can be found in the book of Versteeg &
CHAPTER 4. NUMERICAL IMPLEMENTATION 57<br />
Malalasekera [83].<br />
U +<br />
P<br />
nience:<br />
wall<br />
function<br />
applied<br />
Figure 4.2: <strong>The</strong> high-Reynolds-number grid<br />
is calculated from the log law (Equation 2.39), repeated here for conve-<br />
U +<br />
P<br />
1<br />
=<br />
κ ln Ey + <br />
p<br />
(4.16)<br />
where y + p is obtained from the C 1/4<br />
µ k 1/2 velocity scale suggested by Launder<br />
& Spalding [34]:<br />
y + p = C1/4 µ k 1/2<br />
p yp<br />
ν<br />
yp is the distance of the near-wall cell node from the wall.<br />
<strong>Wall</strong> shear stress is obtained from Equation 2.44. It is<br />
− τw<br />
ρ<br />
τw = ρC1/4 µ k 1/2<br />
p 〈U〉 P<br />
U +<br />
P<br />
(4.17)<br />
(4.18)<br />
from Equation 4.18 may be added <strong>to</strong> the x-momentum equation as a
CHAPTER 4. NUMERICAL IMPLEMENTATION 58<br />
source. 6 Since τw contains a 〈U〉 P term, the SP source is used:<br />
SP = S ′ P − C1/4 µ k 1/2<br />
p<br />
U + p<br />
(4.19)<br />
where S ′ P is the value of SP before the log-law term is added (containing only<br />
the time-dependence term).<br />
Also, AS is modified <strong>to</strong> cut the link <strong>to</strong> the wall and prevent a second (in-<br />
accurate) accounting of τw via the normal functioning of the x-momentum<br />
equation. <strong>The</strong> modified terms are<br />
AS = 0<br />
AP = AN (4.20)<br />
This modification is common <strong>to</strong> all wall function treatments on 〈U〉, k, ε,<br />
and ω.<br />
Average production and dissipation of k in the near-wall cell ( <br />
Pk p and<br />
(ε) p ) are calculated from Equations 2.45 and 2.46. In descretised form, these<br />
become<br />
Substituting Equation 4.18,<br />
<br />
〈U〉P<br />
Pk = τw<br />
p<br />
yp<br />
<br />
(kp)<br />
(ε) p = ρCµ<br />
2<br />
〈U〉P <br />
<br />
Pk p<br />
τw<br />
yp<br />
ρC1/4 µ k<br />
= 1/2<br />
p (〈U〉 P ) 2<br />
U +<br />
P<br />
(ε) p = C 3/4<br />
µ k 3/2<br />
· yp<br />
U +<br />
P<br />
yp<br />
<br />
(4.21)<br />
(4.22)<br />
(4.23)<br />
(4.24)<br />
6 In general, one would integrate τw with respect <strong>to</strong> the surface area over which it acts<br />
before applying the result as a source <strong>to</strong> the x-momentum equation. In channel flow<br />
geometry, τw acts over a surface of unit area.
CHAPTER 4. NUMERICAL IMPLEMENTATION 59<br />
<br />
1<br />
1<br />
Pk dy − (ε)p dy<br />
ρ p ρ<br />
must be added <strong>to</strong> the transport equation of k<br />
in the near-wall cell as a source. k may be fac<strong>to</strong>red out of the equation for<br />
(ε) p , and the remaining equation (including the k 1/2 term) may be placed in<br />
the SP source. This amounts <strong>to</strong> modelling k 3/2<br />
p in the equation for (ε) p as<br />
<br />
1/2<br />
kp · k old<br />
p<br />
, where k old<br />
p is the previous iteration value of kp.<br />
<strong>The</strong> terms in the k equation are modified as follows:<br />
SP = S ′ <br />
C<br />
P −<br />
3/4<br />
µ k 1/2<br />
U + <br />
p<br />
P<br />
∆yp<br />
ρ yp<br />
<br />
C 1/4<br />
µ k 1/2<br />
p (〈U〉 P ) 2<br />
<br />
SU = S ′ U +<br />
U +<br />
P<br />
· yp<br />
∆yp<br />
(4.25)<br />
In treating the transport equation of ε, the value of ε is simply prescribed in<br />
the near-wall cell according <strong>to</strong> the mixing length hypothesis (Equation 2.47):<br />
εp = C3/4 µ k3/2 κyp<br />
(4.26)<br />
By making SP and SU large, other terms in the transport equation of ε may<br />
be made numerically insignificant in the near-wall cell, allowing a prescribed<br />
value <strong>to</strong> be specified in SU. <strong>The</strong> source terms are set as follows:<br />
SP = −G<br />
<br />
C<br />
SU = G ·<br />
3/4<br />
µ k3/2 <br />
κyp<br />
(4.27)<br />
where G is a very large number, chosen <strong>to</strong> be several orders of magnitude<br />
greater than any other terms that will appear in the transport equation of ε.
CHAPTER 4. NUMERICAL IMPLEMENTATION 60<br />
4.4.4 <strong>The</strong> Subgrid Approach<br />
<strong>The</strong> subgrid implementation employed in this work begins with the same grid<br />
used for a log-law wall function, discussed above. This is referred <strong>to</strong> as the<br />
‘main grid’. Within the wall-adjacent cell of the main grid, the subgrid code<br />
generates a subgrid mesh, as shown schematically in Figure 4.3. Within<br />
the subgrid mesh, 50 nodes were used, with an expansion fac<strong>to</strong>r of 1.10.<br />
<strong>The</strong> subgrid mesh is similar <strong>to</strong> the low-Reynolds-number mesh shown in<br />
Figure 4.1, but it fills only the near-wall region corresponding <strong>to</strong> the wall-<br />
adjacent cell of the main grid. <strong>The</strong> subgrid mesh differs from the main<br />
grid mesh in the choice of node locations. While the main grid uses cell<br />
vertexes centred between nodes, the subgrid coded in this work uses nodes<br />
centred between vertexes. 7 This affects way in which linear interpolations<br />
are calculated within the code.<br />
main grid<br />
node<br />
subgrid<br />
node<br />
subgrid<br />
region<br />
Figure 4.3: <strong>The</strong> subgrid mesh, adapted from Gant [21]<br />
7 This is due only <strong>to</strong> programmer preference.
CHAPTER 4. NUMERICAL IMPLEMENTATION 61<br />
<strong>The</strong> subgrid values are updated within the main iteration loop of the CFD<br />
code. After 〈U〉, k, and ε or ω in the main grid have been updated in one<br />
iteration, the subgrid update function is called. This function is essentially<br />
the main iteration loop of another, embedded CFD code that performs one<br />
iteration <strong>to</strong> solve for 〈U〉, k, and ˜ε or ω in the subgrid. Before the subgrid<br />
calculations are performed, data are taken from the main grid <strong>to</strong> act as<br />
boundary conditions on the subgrid. After the subgrid is updated, subgrid-<br />
averaged values are extracted in order <strong>to</strong> act as wall function inputs <strong>to</strong> the<br />
next main grid iteration. Thus, there is a cyclic exchange of information.<br />
<strong>The</strong> data required as input <strong>to</strong> the subgrid calculation are the values of 〈U〉,<br />
k, and ε or ω at the outer extent of the subgrid (where the subgrid ends and<br />
the main grid transport equations begin). Transport equations are solved in<br />
every subgrid cell (except in the case of the k-ω model, where the very-near-<br />
wall values of ω are prescribed, as discussed above). At the wall node, zero<br />
values of 〈U〉, k, and ˜ε are set. At the node placed farthest from the wall,<br />
at the outer-most point on the subgrid, the values of 〈U〉, k, and ˜ε or ω are<br />
set as being equal <strong>to</strong> the corresponding values linearly interpolated from the<br />
two nearest main grid nodes.<br />
<strong>The</strong> boundary conditions on the main grid are more complex. 〈U〉 receives its<br />
boundary condition as in the above section on log-law wall functions, except<br />
that the wall shear stress, τw is obtained from the application of New<strong>to</strong>n’s<br />
law of viscosity at the subgrid’s near-wall cell node:<br />
<br />
∂ 〈U〉 <br />
τw = ρν <br />
∂y<br />
y=0<br />
Taking s1 as the near-wall subgrid cell node and discretising ∂〈U〉<br />
∂y<br />
<br />
<br />
y=0<br />
(4.28)<br />
within
CHAPTER 4. NUMERICAL IMPLEMENTATION 62<br />
the subgrid, SU of the main grid near-wall cell node is modified as follows:<br />
SU = S ′ <br />
〈U〉s1<br />
U − ν<br />
(4.29)<br />
To obtain the main grid boundary condition on k, volume-weighted subgrid<br />
averages of turbulent production (Pk) and dissipation (ε = ˜ε+ˆε) are required.<br />
<strong>The</strong>se are readily obtained after the subgrid governing equations have been<br />
solved. <strong>The</strong>se values may be integrated with respect <strong>to</strong> the main grid near-<br />
wall cell volume and then incorporated as a source in the main grid near-wall<br />
cell equation for k:<br />
For the k-ω model<br />
ys1<br />
SU = S ′ U + Pk − ε (4.30)<br />
ε = (ωk)β ∗<br />
(4.31)<br />
Note that, in the above equation for ε, the quotient is averaged. If the<br />
individual terms are averaged separately and then multiplied, the boundary<br />
condition will not be correct. Terms may only be averaged separately where<br />
the net source applied <strong>to</strong> an equation is a linear combination of those terms.<br />
<strong>The</strong> boundary condition on ε is obtained in a very similar manner <strong>to</strong> the<br />
boundary condition on k. Rather than prescribing a value of ε in the main<br />
grid near-wall cell, the terms leading <strong>to</strong> the production and distruction of ˜ε<br />
are averaged throughout the subgrid, leading <strong>to</strong> a net production of ˜ε <strong>to</strong> be<br />
applied <strong>to</strong> the main grid. (In the main grid node, ˜ε may be taken as being<br />
synonymous with ε, since ˆε → 0 away from solid boundaries.) <strong>The</strong> modified<br />
source term applied <strong>to</strong> the main grid near-wall cell is<br />
SU = S ′ U + Cε1<br />
<br />
f1<br />
<br />
˜ε<br />
Pk − Cε2 f2<br />
k<br />
<br />
˜ε 2<br />
− E − Y (4.32)<br />
k
CHAPTER 4. NUMERICAL IMPLEMENTATION 63<br />
Unfortunately, a similar approach was found <strong>to</strong> be impossible in specifying<br />
the boundary condition on ω. This is thought <strong>to</strong> be due <strong>to</strong> the near-wall be-<br />
haviour of ω. Because ω approaches infinity near the wall, subgrid-averaged<br />
production and destruction values are difficult <strong>to</strong> obtain. <strong>The</strong>refore, ω is<br />
specified at the main grid near-wall cell node according <strong>to</strong> linear interpola-<br />
tion between the two closest subgrid nodes. Given an interpolated subgrid<br />
ω value, ωsg, the source terms on ω in the main grid are<br />
where G is a large number.<br />
SP = −G<br />
SU = G · (ωsg) (4.33)<br />
<strong>The</strong> <strong>UMIST</strong>-N subgrid wall function simplifies near-wall calculation, as com-<br />
pared <strong>to</strong> a low-Reynolds-number treatment, by removing pressure correction<br />
and the wall-normal momentum equation from the solution procedure. Thus,<br />
the flow calculation is reduced <strong>to</strong> a parabolic problem. Since PASSABLE<br />
is a parabolic code with wall-normal velocity constrained <strong>to</strong> be zero, the<br />
differences between the subgrid wall function approach and a low-Reynolds-<br />
number treatment of steady channel flow may be expected <strong>to</strong> be less sig-<br />
nificant, both in terms of accuracy and computational cost, than would be<br />
found in other flow geometries.<br />
One key difference remaining between the subgrid and low-Reynolds-number<br />
calculations is the necessity of applying subgrid results <strong>to</strong> the main grid as<br />
wall-function-type boundary conditions, rather than solving the governing<br />
equations in an uninterrupted manner through the near-wall region. Fur-<br />
thermore, a potential exists for instability <strong>to</strong> be introduced by the lag that<br />
exists between a main grid update and a subgrid update. This lag comes
CHAPTER 4. NUMERICAL IMPLEMENTATION 64<br />
about by the way in which main grid and subgrid solutions are updated in<br />
alternation, with data from each being passed as boundary conditions <strong>to</strong> the<br />
other, in turn. Finally, the subgrid allows a very different level of grid re-<br />
finement <strong>to</strong> be employed within the subgrid than in the main grid. Thus,<br />
extensive near-wall grid refinement may be achieved without the numerical<br />
problems that are usually associated with a single grid employing a very large<br />
expansion fac<strong>to</strong>r.<br />
4.5 Under-Relaxation<br />
Under-relaxation is a technique that involves hindering the rate of conver-<br />
gence of the CFD code in order <strong>to</strong> dampen spurious effects and reduce the<br />
risk of overshooting the converged solution.<br />
Generally, after an updated solution <strong>to</strong> one of the governing differential equa-<br />
tions has been obtained, the resulting calculated local values of a quantity φ<br />
will replace the previous values, according <strong>to</strong><br />
φ new = φ calc<br />
(4.34)<br />
When under-relaxation is used, an under-relaxation fac<strong>to</strong>r, α may be applied,<br />
and the updated values of φ will be the weighted average of φ calc and φ old ,<br />
according <strong>to</strong><br />
φ new = αφ calc + (1 − α) φ old<br />
(4.35)
CHAPTER 4. NUMERICAL IMPLEMENTATION 65<br />
In the discretised transport equations, under-relaxation is implemented by<br />
(AP ) ur = 1<br />
α AP<br />
(SU) ur = SU + (1 − α) AP φp<br />
(4.36)<br />
<strong>The</strong> under-relaxation fac<strong>to</strong>rs used in this thesis are shown in Tables 4.2 and<br />
4.3.<br />
Table 4.2: Under-relaxation fac<strong>to</strong>rs used in the main grid<br />
〈U〉 0.8<br />
k 0.5<br />
ε 1.0<br />
˜ε 1.0<br />
ω 1.0<br />
Table 4.3: Under-relaxation fac<strong>to</strong>rs used in the subgrid<br />
〈U〉 0.7<br />
k 0.7<br />
˜ε 0.7<br />
ω 0.7
Chapter 5<br />
Results<br />
<strong>The</strong> performance of the <strong>UMIST</strong>-N near-wall subgrid treatment was tested<br />
in channel flow. <strong>The</strong> PASSABLE code was used <strong>to</strong> implement a parabolic<br />
solution method <strong>to</strong> solve this flow domain. For this work, the PASSABLE<br />
code was extended <strong>to</strong> allow high-Reynolds-number (wall function and sub-<br />
grid) solutions. Also, a separate implementation of the turbulence models<br />
and a separate solver were written <strong>to</strong> be employed in solving the subgrid<br />
region near the wall (extending from y/δ = 0 <strong>to</strong> y/δ = 0.2).<br />
<strong>The</strong> models implemented in the subgrid are the standard k-ε model [33] with<br />
Yap correction [92] and the 1988 k-ω model [89]. PASSABLE supports a<br />
range of turbulence models for the solution of the main grid. <strong>The</strong> models<br />
employed in this work were the low-Reynolds-number k-ε model with Yap<br />
correction, the 1988 k-ω model, and the high-Reynolds-number k-ε model<br />
(newly added). <strong>The</strong> configurations of turbulence models used in this work<br />
are summarised descriptively in Table 5.1.<br />
66
CHAPTER 5. RESULTS 67<br />
Table 5.1: Configurations of turbulence models<br />
Low-Re k-ε <strong>The</strong> subgrid was not employed and the low-Reynolds-<br />
number standard k-ε model was used.<br />
k-ε with log law <strong>The</strong> subgrid was not employed and the high-Reynolds-<br />
number standard k-ε model was used with a<br />
log-law boundary condition near the wall.<br />
Subgrid k-ε <strong>The</strong> high-Reynolds-number standard k-ε model<br />
was used in the main grid with a near-wall boundary<br />
condition derived from a subgrid solution. <strong>The</strong> subgrid<br />
employed the low-Reynolds-number standard k-ε model.<br />
Subgrid k-ω <strong>The</strong> 1988 k-ω model was used in the main grid with a<br />
near-wall boundary condition derived from a subgrid<br />
solution. <strong>The</strong> subgrid also employed the 1988 k-ω model.<br />
Three test cases were implemented: steady channel flow, channel flow driven<br />
by a periodically variable pressure gradient, and channel flow constrained <strong>to</strong><br />
exhibit a periodically variable bulk flow rate. <strong>The</strong> two periodic cases differ<br />
in that the former matches the pressure gradient fluctuation of the DNS<br />
study of Kawamura & Homma [29] while the latter matches the bulk flow<br />
variation presented in that DNS result. <strong>The</strong> steady flow case was performed<br />
at a nominal friction velocity Reynolds number of Reτ = 180. 1 <strong>The</strong> periodic<br />
flow cases were configured such that the time average flow would conform <strong>to</strong><br />
1 <strong>The</strong> boundary conditions on the code were configured such that 180 would be a correct<br />
value of Reτ based on a theoretical analysis. <strong>The</strong> actual Reynolds number obtained was<br />
different, as discussed below. This is what is meant by ‘nominal’ Reτ .
CHAPTER 5. RESULTS 68<br />
a nominal Reτ of 180.<br />
5.1 Steady <strong>Flow</strong> Results<br />
Although the principal goal of this work is <strong>to</strong> test the performance of the<br />
<strong>UMIST</strong>-N method in periodic flow, the steady flow case offers a simpler test<br />
case in which <strong>to</strong> verify the code.<br />
Steady channel flow results for the k-ε and k-ω models are widely available.<br />
<strong>The</strong> <strong>UMIST</strong>-N approach with the standard k-ε model was applied <strong>to</strong> channel<br />
flow using the TEAM code by Gant during the early development of <strong>UMIST</strong>-<br />
N [21]. <strong>The</strong> application of the <strong>UMIST</strong>-N approach with a k-ω model <strong>to</strong><br />
steady channel flow is new.<br />
All the model configurations shown in Table 5.1 were applied <strong>to</strong> steady chan-<br />
nel flow and the results are presented here. Figures 5.1 & 5.2 show U + and<br />
k + (respectively) plotted against y/δ. Figures 5.3 & 5.4 show a better view<br />
of near-wall values plotted against y + on logarithmic scales. <strong>The</strong> results are<br />
compared the analytical profiles from Chapter 3 and <strong>to</strong> the data of Kim et<br />
al. [30], who employed the same Reτ.<br />
<strong>The</strong> pressure gradient driving the flow was chosen <strong>to</strong> produce a nominal Reτ<br />
of 180. By applying the definition of Reτ (Equation 3.25), a value of Uτ was<br />
obtained that was used in nondimensionalisation. From Equations 3.23 &<br />
3.19, a corresponding<br />
∂〈P 〉<br />
∂x<br />
was specified. This ∂〈P 〉<br />
∂x<br />
was allowed <strong>to</strong> drive the<br />
flow, with the actual calculated flow rate being a function of the turbulence<br />
model used.
CHAPTER 5. RESULTS 69<br />
<strong>The</strong> solution procedure employed involved initialising flow variables <strong>to</strong> zero,<br />
applying the driving pressure gradient, and iteratively updating the solution<br />
until convergence was achieved. Gradients in time ( ∂<br />
∂t<br />
terms) were included<br />
in the solution, so that unconverged results may have been regarded con-<br />
ceptually as the transient response of the flow <strong>to</strong> a step change in pressure.<br />
However, transient results are not shown. ∂<br />
∂t<br />
terms do not affect the con-<br />
verged result in steady flow and were included primarily for debugging.<br />
In Figure 5.1, the k-ε solutions overpredict peak velocity and bulk flow, while<br />
the k-ω model underpredicts. Figure 5.3 shows that the 〈U〉 + results nearer<br />
<strong>to</strong> the wall are similar for each model and match the DNS result closely.<br />
Equation 3.17 can be evaluated at y = 0 <strong>to</strong> obtain<br />
<br />
d 〈U〉 y=0<br />
τw = ρν<br />
dy<br />
d〈P 〉<br />
dx by<br />
Recalling Equation 3.19, τw is related <strong>to</strong><br />
<br />
d 〈P 〉<br />
τw = −δ<br />
dx<br />
(5.1)<br />
(5.2)<br />
<strong>The</strong>refore, close agreement on 〈U〉 + near the wall is <strong>to</strong> be expected from the<br />
prescription of<br />
d〈P 〉<br />
dx . <strong>The</strong> deviation in 〈U〉+ occurs farther from the wall and<br />
is likely due <strong>to</strong> the prediction of νt.<br />
<strong>The</strong> subgrid solution produces results that are very similar <strong>to</strong> those of the<br />
low-Reynolds-number approach. This is <strong>to</strong> be expected, since the internal<br />
subgrid calculation is identical <strong>to</strong> a standard low-Reynolds-number calcu-<br />
lation in a parabolic solution scheme. <strong>The</strong> unique aspect of the subgrid<br />
approach as compared <strong>to</strong> a low-Reynolds-number parabolic solution is in the<br />
transferral of information between the subgrid and the main grid via mutu-<br />
ally dependent boundary conditions. However, this complexity is unlikely <strong>to</strong>
CHAPTER 5. RESULTS 70<br />
affect the solution of steady channel flow. This assumption is supported by<br />
the smoothness of the subgrid solution on both U + and k + in the vicinity<br />
of y/δ = 0.2, where the subgrid and the main grid meet. <strong>The</strong> small differ-<br />
ence observed between the subgrid and low-Reynolds-number k-ε solutions<br />
is likely due <strong>to</strong> differences in grid refinement. Although the subgrid solution<br />
uses fewer cells in <strong>to</strong>tal (summing the subgrid and the main grid cells) than<br />
the low-Reynolds-number approach, it offers enhanced near-wall refinement<br />
within the subgrid, with a coarser grid employed away from the wall. <strong>The</strong><br />
fact that the subgrid solution produced a velocity profile that is very slightly<br />
nearer <strong>to</strong> the DNS result highlights a secondary benefit of the <strong>UMIST</strong>-N<br />
approach, which is that the application of boundary conditions at a subgrid<br />
/ main grid boundary allows an opportunity for extensive and sudden vari-<br />
ation in grid refinement without some of the numerical challenges usually<br />
associated with inconsistent cell sizes.<br />
<strong>The</strong> logarithmic law of the wall produces excellent results in steady channel<br />
flow. This is <strong>to</strong> be expected, since it was designed and tuned with this par-<br />
ticular flow configuration in mind. Figures 5.1 & 5.3 indicate nearly perfect<br />
agreement on velocity. <strong>The</strong> discrepancy in k + seen in Figures 5.2 & 5.4 is<br />
likely the result of that variable’s definition within the k-ε model. Although<br />
k is intended <strong>to</strong> model turbulent kinetic energy, the model constants have<br />
been chosen with the primary aim of producing good agreement with exper-<br />
iments in the prediction of velocities. k is related <strong>to</strong> velocity via the EVM.<br />
Functionally, then, it may be convenient <strong>to</strong> conceptualise k not as turbulent<br />
kinetic energy but simply as that parameter which is required by the EVM<br />
<strong>to</strong> produce desirable values of velocity. With this in mind, the log law’s pre-<br />
diction of k + near the wall in channel flow must match a hypothetical ideal<br />
k-ε solution that reproduces the DNS result for U + . It must not necessarily
CHAPTER 5. RESULTS 71<br />
match the DNS result for k + .<br />
<strong>The</strong> subgrid approach with the k-ω turbulence model performs rather well. It<br />
can be seen <strong>to</strong> underpredict U + in Figures 5.1 & 5.3, although by a relatively<br />
small margin. Away from the wall, the value of k in the k-ω model offers a<br />
good approximation <strong>to</strong> the DNS result, as seen in Figures 5.2 & 5.4.<br />
All of the solutions underpredict turbulent kinetic energy near the wall, as<br />
is particularly apparent in Figure 5.4. Tracing from the symmetry plane of<br />
the channel <strong>to</strong>wards the wall, the point at which the modelled solutions tend<br />
<strong>to</strong> depart from the DNS result is y + ≈ 40. This corresponds roughly <strong>to</strong> the<br />
outer extent of the buffer layer (see Table 2.4).<br />
Overall, the steady channel flow results appear consistent with prior work<br />
and offer credibility <strong>to</strong> the following calculations involving periodic flow.<br />
5.2 Prescribed <strong>Periodic</strong> Pressure Gradient<br />
<strong>The</strong> flow was subjected <strong>to</strong> the same periodically variable pressure gradient<br />
employed by Kawamura & Homma [29] in their DNS study. This pressure<br />
gradient was defined by<br />
∂ +<br />
<br />
〈P 〉<br />
2π<br />
= 1 + 6 sin<br />
∂x<br />
6 t+<br />
<br />
where<br />
∂〈P 〉<br />
∂x<br />
(5.3)<br />
and t (time) are nondimensionalised by<br />
+<br />
∂ 〈P 〉<br />
∂x<br />
=<br />
<br />
∂〈P 〉<br />
∂x<br />
2<br />
ρ(Uτ ) ss<br />
(5.4)<br />
t + = (Uτ) ss t<br />
δ<br />
δ<br />
(5.5)
CHAPTER 5. RESULTS 72<br />
(Uτ) ss is calculated from (Reτ) ss = 180. This implies that<br />
+<br />
∂〈P 〉<br />
∂x<br />
ss<br />
= 1.<br />
Because of Equation 5.2, this also suggests a time-mean value of τw corre-<br />
sponding <strong>to</strong> the steady flow case considered above.<br />
To generate the periodic flow results, a converged steady flow solution was<br />
first reached. <strong>The</strong>n, pressure gradient variation was introduced according <strong>to</strong><br />
Equation 5.3. To ensure convergence, 1000 time steps were used per period in<br />
the periodic flow case. At each time step, the code was run until convergence<br />
was achieved. However, this convergence was intermediate in the sense that<br />
it represented an estimate of the solution using the given ∂<br />
∂t<br />
information. To<br />
obtain results representing the effect of long-term periodicity, this process was<br />
repeated through several periods until only negligible changes were observed<br />
in subsequent periods. Thus, start-up effects were eliminated.<br />
Figures 5.5 & 5.6 show the prescribed pressure gradient, the calculated bulk<br />
flow rate, and the calculated wall shear stress plotted with DNS results. <strong>The</strong><br />
graphs show values plotted from periods 0 <strong>to</strong> 2. This is not meant <strong>to</strong> imply<br />
that the first two periods of generated output are plotted. <strong>The</strong>se graphs are<br />
produced from a final, converged period plotted twice for visual clarity.<br />
Figure 5.5 shows a marked underprediction of the amplitude of variation<br />
in bulk flow for all of the models employed. Figure 5.6 also indicates that<br />
wall shear stress is underpredicted. This is consistent with the findings of<br />
Addad [1], and, as he pointed out, the relationship between τw, U, and<br />
is manifest in the x-momentum equation governing the flow (Equation 3.5).<br />
Employing the definition of the shear stress, τ(y) from Equation 3.17, the<br />
x-momentum equation is<br />
∂ 〈U〉<br />
∂t<br />
∂ 〈P 〉<br />
= −1<br />
ρ ∂x<br />
1 dτ<br />
+<br />
ρ dy<br />
∂〈P 〉<br />
∂x<br />
(5.6)
CHAPTER 5. RESULTS 73<br />
Integrating with respect <strong>to</strong> y,<br />
δ <br />
∂<br />
1 ∂ 〈P 〉<br />
〈U〉 dy = −<br />
y|<br />
∂t<br />
ρ ∂x<br />
y=δ<br />
<br />
τ <br />
y=0 + <br />
ρ<br />
0<br />
τ=0<br />
τ=τw<br />
Dividing by δ and noting that 1<br />
δ<br />
〈U〉 dy = U, Equation 5.7 becomes<br />
δ 0<br />
dU<br />
dt<br />
+ τw<br />
ρδ<br />
∂ 〈P 〉<br />
= −1<br />
ρ ∂x<br />
(5.7)<br />
(5.8)<br />
Thus, in unsteady channel flow, the driving pressure gradient applies energy<br />
<strong>to</strong> both overcome a wall shear stress and <strong>to</strong> accelerate the flow. <strong>The</strong> fact that<br />
peaks and troughs in U are underpredicted in Figure 5.5 indicates that dU<br />
dt is<br />
underestimated by the turbulence models. τw also displays a lower amplitude<br />
of variation than expected, as seen in Figure 5.6. This is consistent with<br />
<br />
<br />
(Equation 5.1). Together, these<br />
Figure 5.5, since τw is a function of ∂〈U〉<br />
∂y<br />
results suggest that the energy is added <strong>to</strong> and removed from the flow at a<br />
less than realistic rate.<br />
<strong>The</strong> equality in Equation 5.8 appears <strong>to</strong> be compromised when using these<br />
turbulence models in periodic flow. In terms of the x-momentum equation<br />
(Equation 3.5), this suggests that the models are not as well tuned <strong>to</strong> predict<br />
〈uv〉 in periodic channel flow as in steady channel flow. Errors in predicting<br />
〈uv〉 produce deviations in 〈U〉, particularly farther from the wall, as seen in<br />
Figures 5.11 & 5.12. This effects the dU<br />
dt<br />
y=0<br />
term in Equation 5.8.<br />
Figures 5.7, 5.8, 5.9 & 5.10 show flow variables plotted as a function of phase<br />
angle at various locations throughout the channel (y/δ = 0.1, 0.2, 0.5 & 0.9,<br />
respectively).<br />
Results for the k-ε log law do not appear in Figure 5.7, because y/δ = 0.1<br />
is outside the calculated flow field when the log law is used. In Figure 5.8,
CHAPTER 5. RESULTS 74<br />
where y/δ = 0.2, the log law produces results for k + that are in phase with the<br />
results for 〈U〉 + . This is <strong>to</strong> be expected from the log law equations. Further<br />
from the wall, where the k-ε model equations are applied, the generated<br />
result is improved, but still offers little encouragement as <strong>to</strong> the applicability<br />
of the log law <strong>to</strong> this flow.<br />
Examining turbulent kinetic energy, k + in Figures 5.7, 5.8, 5.9 & 5.10, it<br />
appears that the subgrid k-ε treatment closely matches the low-Reynolds-<br />
number k-ε solution for y/δ ≤ 0.2, within the subgrid region. Outside of the<br />
subgrid region (Figures 5.9 & 5.10), the subgrid solution appears <strong>to</strong> capture<br />
the effects of variations in<br />
∂〈P 〉<br />
∂x<br />
slightly less effectively than the low-Reynolds-<br />
number counterpart. This suggests that the process of averaging the subgrid<br />
solution <strong>to</strong> be applied as a boundary condition <strong>to</strong> the main grid introduces<br />
some discernible measure of inaccuracy. <strong>The</strong> subgrid solution can therefore<br />
produce different results than a calculation that is continuous throughout the<br />
flow field (standard low-Reynolds-number treatment), even when the same<br />
turbulence model is used in each case.<br />
<strong>The</strong> k-ω solution produces and amplitude of oscillation of τw that more closely<br />
matches the DNS than that produced by the k-ε subgrid solution (Figure<br />
5.6). Correspondingly, the k-ω model produces fluctuations in bulk velocity<br />
that are also slightly improved (Figure 5.5). This is an indication of the<br />
applicability of the k-ω model <strong>to</strong> boundary layer flow. <strong>The</strong> k-ω model exhibits<br />
a less prominent peak in turbulent kinetic energy than is produced by the<br />
k-ε model (Figures 5.7, 5.8, 5.9 & 5.10). This may be compounded by the<br />
general tendency of the k-ω model <strong>to</strong> offer lower values of k, as observed in<br />
the steady flow results.
CHAPTER 5. RESULTS 75<br />
Figures 5.11, 5.12, 5.13 & 5.14 offer snapshots showing 〈U〉 + and k + , respec-<br />
tively, throughout the channel at various discrete phase positions. Figures<br />
5.15, 5.16, 5.17 & 5.18 show the same again, but plotted against y + rather<br />
than y/δ.<br />
Because of the general inaccuracy of all the models, it is difficult <strong>to</strong> make<br />
comparisons based on Figures 5.11 <strong>to</strong> 5.18. Figures 5.13 & 5.14 again high-<br />
light the tendency of the log law solution of k + <strong>to</strong> generate spurious results<br />
at y/δ = 0.2 where the log law is applied. Furthermore, Figures 5.17 & 5.18<br />
show that all the models produced an underprediction of k + near the wall.<br />
This is similar <strong>to</strong> the underprediction observed in the steady flow case.<br />
To better facilitate comparisons between the models, and following the pe-<br />
riodic channel flow investigation of Addad [1], a further test case was con-<br />
sidered in which the modelled flows are constrained <strong>to</strong> exhibit the same bulk<br />
flow rates shown in the DNS study. <strong>The</strong>se results are presented below.<br />
5.3 Prescribed <strong>Periodic</strong> Bulk <strong>Flow</strong> Rate<br />
<strong>The</strong> code was configured <strong>to</strong> match the bulk flow from the DNS study of<br />
Kawamura & Homma [29], rather than the<br />
∂〈P 〉<br />
∂x<br />
data. Figure 5.19 shows<br />
the resulting pressure variations compared <strong>to</strong> the pressure variation in the<br />
DNS study. As expected, the resultant pressure variation is higher. <strong>The</strong><br />
amplitude on the fluctuation in<br />
∂〈P 〉<br />
∂x is greater than the DNS amplitude by<br />
approximately 100%. Correspondingly, wall shear stress is increased.<br />
As seen in Figure 5.20, the k-ε low-Reynolds-number and subgrid results now
CHAPTER 5. RESULTS 76<br />
more closely resemble the DNS data for τw, except that they exhibit a double-<br />
peak behaviour. τw produced by the k-ω subgrid matches the troughs in the<br />
DNS data effectively, but the peak values are disappointingly overestimated.<br />
<strong>The</strong> asymmetry in τw suggests that the k-ω model predicts excessively steep<br />
profiles of 〈U〉 + near the wall for most phase angles, as can be seen in Figures<br />
5.31 & 5.32.<br />
<strong>The</strong> further figures mirror the presentation format employed in the previous<br />
section. Figures 5.21, 5.22, 5.23 & 5.24 display flow variables through time<br />
at y/δ locations of 0.1, 0.2, 0.5 & 0.9, respectively. Figures 5.25, 5.26, 5.27<br />
& 5.28 show snapshots of the channel at various phase angles, and Figures<br />
5.29, 5.30, 5.31 & 5.32 show these against a logarithmic y + scale.<br />
Figures 5.21, 5.22, 5.23 & 5.24 show a tendency for the low-Reynolds-number<br />
k-ε model <strong>to</strong> exhibit a delay in predicting an increase in k + when the flow<br />
is accelerating. When it appears (for example, at a phase angle of 7π/6<br />
in Figure 5.23), the anticipated increase in k + is sudden and sharp. At<br />
y/δ ≤ 0.5, the peak value of k + through time predicted by the low-Reynolds-<br />
number k-ε model (and indeed by all of the models considered in this work) is<br />
lower than the DNS result, but k + is actually overpredicted throughout most<br />
of the portion of the cycle during which the flow is decelerating. In Figure<br />
5.24, with y/δ = 0.9, the peak value of k + is overpredicted by all except the<br />
k-ω subgrid model and the overprediction of k + during deceleration of the<br />
flow is very pronounced in all of the modelled results.<br />
<strong>The</strong> use of the <strong>UMIST</strong>-N subgrid approach with the k-ε model does not ap-<br />
pear <strong>to</strong> alter the phase position of the suden increase in k + noted above. How-<br />
ever, the subgrid approach does appear <strong>to</strong> soften this effect. <strong>The</strong> maximum
CHAPTER 5. RESULTS 77<br />
gradient of k + seen in Figures 5.23 & 5.24 is lower than for the low-Reynolds-<br />
number k-ε model. Furthermore, the extent of over- and underprediction of<br />
k + is diminished throughout the cycle. One reason for this may be that<br />
diffusion is not accounted for across the subgrid boundary. Although the<br />
subgrid is constrained <strong>to</strong> match the main grid value of k + at y/δ = 0.2, there<br />
is no diffusion of k in<strong>to</strong> the main grid from the subgrid. <strong>The</strong> only information<br />
transmitted from the subgrid <strong>to</strong> the main grid in the calculation of the model<br />
equation of k is subgrid-averaged Pk and ε.<br />
Two other potential sources of discrepancy between subgrid and low-Reynolds-<br />
number treatments are detalied here. Firstly, greater numerical errors may<br />
occur in the subgrid solution as a result of the averaging process that is used<br />
<strong>to</strong> apply subgrid results <strong>to</strong> the main grid as boundary conditions. Secondly,<br />
the subgrid solution may be configured <strong>to</strong> offer greater near-wall grid refine-<br />
ment because of the fact that the subgrid cell sizes may be set independently<br />
of the main grid cell sizes. In this work, the subgrid solution did employ<br />
smaller cells near the wall than were used in the low-Reynolds-number treat-<br />
ment, because the use of a high-Reynolds-number model in the main grid<br />
allowed the use of fewer nodes in <strong>to</strong>tal. However, suitable grid refinement<br />
was employed in all cases so that the computed results may be assumed <strong>to</strong><br />
be independent of cell size. It must be highlighted that the potential of<br />
the subgrid treatment <strong>to</strong> achieve greater near-wall grid refinement without<br />
impacting the refinement of the main grid is a powerful feature of <strong>UMIST</strong>-N.<br />
Notably, any difference between the subgrid and low-Reynolds-number k-ε<br />
profiles is less discernable in Figures 5.21 & 5.22, where y/δ ≤ 0.2. This<br />
region falls within the subgrid itself, and the calculation there is substan-<br />
tially similar <strong>to</strong> a standard low-Reynolds-number treatment. <strong>The</strong> difference
CHAPTER 5. RESULTS 78<br />
between the subgrid and standard low-Reynolds-number treatments is in the<br />
averaging used within the subgrid <strong>to</strong> apply subgrid results as a boundary con-<br />
dition <strong>to</strong> the main grid. <strong>The</strong>refore, the impact of using a subgrid treatment<br />
manifests itself beyond y/δ = 0.2.<br />
<strong>The</strong> subgrid k-ω model predicts k + admirably well in Figures 5.21, 5.22, 5.23<br />
& 5.24. It does not exhibit the sudden increase in k + noted above, and actual<br />
predicted values of k + appear <strong>to</strong> be at least as accurate as those of other<br />
models at each of the traverse points shown. However, careful examination<br />
of the DNS data suggests that a slightly greater slope of k + with time is<br />
<strong>to</strong> be expected when k + is increasing than when it is decreasing. At lower<br />
values of y/δ, the k-ω model appears <strong>to</strong> fail <strong>to</strong> capture this effect, suggesting<br />
a qualitative error. Such a criticism would be harsh, however, in light of<br />
Figure 5.24 (y/δ = 0.9), in which the k-ω model does exhibit a greater slope<br />
on the increase of k + than on the decrease. On the whole, the model appears<br />
<strong>to</strong> offer good qualitative and quantitative accuracy.<br />
<strong>The</strong> favourable performance of the k-ω subgrid in predicting k + is most ap-<br />
parent at large y + , as seen in Figures 5.27, 5.28, 5.31 & 5.32. <strong>The</strong> k-ω<br />
prediction matches the DNS almost perfectly for y = δ and phase angles of<br />
5π/4 and 3π/2, and the model produces good results at y = δ for other phase<br />
angles. <strong>Near</strong> the wall, the behaviour of k + is more accurately reproduced by<br />
the k-ω subgrid for phase angles of π/2 and 3π/4 (favourable pressure gradi-<br />
ent) than by the k-ε subgrid. However, the k-ω model’s near-wall predictions<br />
are less favourable at phase angles of 3π/2 and 7π/4, under the influence of<br />
an adverse pressure gradient. At phase angles of 0 and π, there is little<br />
discernible difference among the near-wall predictions of the various models.
CHAPTER 5. RESULTS 79<br />
<strong>The</strong> log law offers predictions of k + in Figures 5.23 & 5.24 that are reasonable.<br />
<strong>The</strong> log law solution has also been improved greatly by the prescription of U<br />
rather than<br />
∂〈P 〉<br />
. It must once again be noted that the log law only produces<br />
∂x<br />
interesting results away from y/δ = 0.2, where it is applied for this particular<br />
flow.<br />
A ‘kinked’ region of large change in gradient tends <strong>to</strong> exist in many of the<br />
profiles of 〈U〉 + . This phenomenon can be seen most clearly in Figures 5.25<br />
& 5.26. It is produced by all of the models except for the log law treatment,<br />
and is particularly prevalent in the profiles produced by the low-Reynolds-<br />
number k-ε model. A kink indicates an underprediction of the diffusion of<br />
〈U〉 + within the vicinity of the kink. Deferring <strong>to</strong> the assumptions of the<br />
EVM, this would suggest a local underprediction of k + . This corollary can<br />
in fact be seen in the figures. Comparing phase angles of 3π/4, π, and 5π/4,<br />
suggests that the location of a kink in 〈U〉 + corresponds <strong>to</strong> a location of<br />
maximum underprediction of k + . This may be seen by examining Figures<br />
5.25 & 5.26 for velocity and 5.27 & 5.28 for k + .<br />
<strong>The</strong> same phenomenon of a kinked velocity profile can be observed indirectly<br />
in Figures 5.21, 5.22, 5.23 & 5.24, where 〈U〉 + predicted by the low-Reynolds-<br />
number k-ε model appears <strong>to</strong> lead the DNS result in phase closer <strong>to</strong> the wall,<br />
whereas it lags the DNS in phase at higher y/δ. This apparent peculiarity is<br />
in fact a symp<strong>to</strong>m of the changing slope of the 〈U〉 + profile produced by the<br />
k-ε model at different phase angles.<br />
All of the models produce flatter velocity profiles than the DNS, as seen in<br />
Figures 5.25, 5.26, 5.29 & 5.30. This is particularly true just after a phase<br />
angle of π, when the flow is subjected <strong>to</strong> an adverse pressure gradient and a
CHAPTER 5. RESULTS 80<br />
sudden increase in k + occurs for y/δ ≥ 0.5 (Figures 5.23 & 5.24). When the<br />
pressure gradient diminishes and becomes adverse, the effect on velocity is<br />
expected <strong>to</strong> manifest itself first near the wall and then propagate outwards.<br />
This happens because the laminar layer near the wall contains less kinetic<br />
energy and therefore less momentum. All of the modelled results exhibit<br />
this preferential slowing of the fluid near the wall when the pressure gradient<br />
becomes adverse, but they do so later in phase and <strong>to</strong> a lesser extent than<br />
what is seen in the DNS data. This can be seen in Figures 5.25 & 5.26.<br />
It is interesting <strong>to</strong> compare the snapshots for the phase angles of π/2, 3π/4,<br />
and π found in Figures 5.29 & 5.30. <strong>The</strong> excessive flatness of the 〈U〉 +<br />
profiles is apparent in all of these snapshots, but particularly at the phase<br />
angle of π, where the flattening occurs at a lower value of y + for all the models<br />
than at the phase angle of π/2. Between these two, the snapshot at phase<br />
angle 3π/4 shows the subgrid k-ω model already flattening at lower y + , while<br />
the low-Reynolds-number k-ε model persists in flattening only at higher y + .<br />
<strong>The</strong> subgrid k-ε modelled results follow the low-Reynolds-number solution<br />
for lower y + , but the 〈U〉 + profile flattens at y/δ ≈ 0.2 earlier <strong>to</strong> join the<br />
subgrid k-ω results for higher y + . <strong>The</strong> point at which the subgrid solution<br />
flattens corresponds roughly <strong>to</strong> the outer extent of the subgrid. Thus, at this<br />
transitional snapshot in time, when the 〈U〉 + profile is undergoing a change<br />
of shape, the solutions appears <strong>to</strong> be particularly sensitive <strong>to</strong> the averaging<br />
procedure used <strong>to</strong> calculate main grid boundary condition from the subgrid<br />
solution.<br />
An interesting feature of the <strong>UMIST</strong>-N subgrid approach is highlighted by<br />
the k-ω prediction of k + at phase angles of π/2 and 3π/4. Here, the k +<br />
profiles predicted by the subgrid k-ω model exhibit a double peak (two local
CHAPTER 5. RESULTS 81<br />
maxima). This is particularly visible in Figure 5.31, but Figure 5.27 shows<br />
that the local minimum between these two peaks lies at y/δ = 0.2, the limit<br />
of the subgrid region and also the point where boundary conditions from the<br />
subgrid are applied <strong>to</strong> the main grid and visa versa. Close inspection of all<br />
the k + profiles produced by the k-ω subgrid reveals minor discontinuities at<br />
this y/δ location for other phase angles also. This is a result of the way<br />
in which the subgrid solution of ω was applied as a boundary condition <strong>to</strong><br />
the main grid. <strong>The</strong> <strong>UMIST</strong>-N approach <strong>to</strong> k and ε boundary conditions<br />
is <strong>to</strong> calculate subgrid averaged production and dissipation terms for these<br />
parameters, which are then applied as source terms within the near-wall cell<br />
in the main grid solution. However, ω tends <strong>to</strong> infinity at the wall, and<br />
source terms on ω become numerically unwieldy in near-wall cells. Thus,<br />
subgrid averaged production of ω could not be obtained and instead the<br />
subgrid profile of ω was interpolated <strong>to</strong> the main grid node and applied there<br />
as a fixed value. 2 This boundary condition appears <strong>to</strong> be less effective than<br />
the average source approach, and, until a more satisfac<strong>to</strong>ry solution <strong>to</strong> the ω<br />
boundary condition problem can be found, it advises against the applicability<br />
of the <strong>UMIST</strong>-N approach <strong>to</strong> a k-ω model solution. This aside, the subgrid<br />
k-ω results appear satisfac<strong>to</strong>ry when considered as a whole.<br />
In addition <strong>to</strong> the above difficulty in the prescription of an ω boundary<br />
condition, further difficulties were encountered in attempting <strong>to</strong> run the k-ω<br />
model in the subgrid with a high-Reynolds-number k-ε model in the main<br />
grid. Poor results were seen <strong>to</strong> arise from the difference in the values of k<br />
produced by the two models under similar conditions. In general, the k-<br />
ω model produces lower values of k than the k-ε model, as noted in the<br />
2 See Chapter 4 for more information.
CHAPTER 5. RESULTS 82<br />
steady flow results. In order <strong>to</strong> reconcile the two models, it was proposed<br />
that a blending function similar <strong>to</strong> that used by the SST model [42] may be<br />
required. <strong>The</strong> development effort was s<strong>to</strong>pped because the added complexity<br />
would have compromised the relevance of the <strong>UMIST</strong>-N approach.<br />
<strong>The</strong> <strong>UMIST</strong>-N approach has been successfully applied <strong>to</strong> periodic flow. <strong>The</strong><br />
subgrid calculation offers discernibly different results than the standard low-<br />
Reynolds-number k-ε model, but neither may readily be identified as supe-<br />
rior. <strong>The</strong>refore, the <strong>UMIST</strong>-N approach is applicable <strong>to</strong> periodic flow. <strong>The</strong><br />
potential breadth of applicability of the approach is further indicated by its<br />
application <strong>to</strong> a k-ω model solution, although the challenge of obtaining main<br />
grid boundary conditions with the k-ω model is highlighted by these results.
Chapter 6<br />
Conclusions & Suggestions for<br />
Future Work<br />
In the present study, the <strong>UMIST</strong>-N near-wall subgrid treatment has been<br />
applied <strong>to</strong> time-variant flow. <strong>The</strong> cases considered have been periodic and<br />
steady channel flow. Results have been matched <strong>to</strong> DNS data on driving<br />
pressure gradient and on bulk flow rate. <strong>The</strong> logarithmic law of the wall, the<br />
k-ε subgrid solution and the low-Reynolds-number k-ε solution were sub-<br />
stantially similar in the steady case, as expected. In the unsteady case, the<br />
subgrid produced results that were much improved over the log law, bear-<br />
ing more similarity <strong>to</strong> the low-Reynolds-number results. <strong>The</strong> subgrid and<br />
low-Reynolds-number results were discernibly different, however, and some<br />
of the features <strong>to</strong> be considered when implementing a subgrid treatment were<br />
highlighted.<br />
<strong>The</strong> use of the k-ω turbulence model within the <strong>UMIST</strong>-N subgrid was also<br />
83
CHAPTER 6. CONCLUSIONS & SUGGESTIONS FOR FUTURE WORK84<br />
tried in each of the above test cases. <strong>The</strong> model produced good results overall,<br />
but its performance was hindered by spurious behaviour at the interface<br />
between the subgrid and the main grid. Numerical challenges associated<br />
with the implementation of the k-ω model within a subgrid approach have<br />
been revealed during this work and were highlighted in the results.<br />
Further steady channel flow data from various sources were also compiled<br />
within this thesis and emperical profiles were presented <strong>to</strong> identify trends.<br />
<strong>The</strong>se profiles could serve as a <strong>to</strong>ol <strong>to</strong> CFD researchers who are engaged in<br />
early development or debugging.<br />
<strong>The</strong> <strong>UMIST</strong>-N approach has been shown <strong>to</strong> be applicable <strong>to</strong> periodic flow.<br />
<strong>The</strong> potential breadth of applicability of the approach is further indicated by<br />
its application <strong>to</strong> a k-ω model solution, despite challenges that were encoun-<br />
tered. Further investigation in<strong>to</strong> the usefulness of the <strong>UMIST</strong>-N approach<br />
in the computation of time-variant industrial flows appears justified.<br />
With particular reference <strong>to</strong> industrial applicability, one potential avenue<br />
for the further development of <strong>UMIST</strong>-N is <strong>to</strong>wards its use in Large Eddy<br />
Simulation. Most LES calculations rely on wall functions, and hybrid com-<br />
binations of RANS and LES are not unknown. <strong>The</strong>refore, a potential exists<br />
for <strong>UMIST</strong>-N <strong>to</strong> offer a benefit <strong>to</strong> LES. <strong>The</strong> satisfac<strong>to</strong>ry performance of the<br />
subgrid method in periodic flow within this study suggests that <strong>UMIST</strong>-N<br />
may be suitable when exposed <strong>to</strong> the rapid local oscillations that can be<br />
associated with the movement of large-scale turbulent structures in LES.<br />
As a <strong>to</strong>ol for industrial modelling, <strong>UMIST</strong>-N offers an intermediate choice,<br />
in terms of accuracy and computational cost, between a standard wall func-<br />
tion boundary and a low-Reynolds-number treatment. This choice could be
CHAPTER 6. CONCLUSIONS & SUGGESTIONS FOR FUTURE WORK85<br />
further optimised or simply expanded by the incorporation of other turbu-<br />
lence models within the subgrid. This work has applied the k-ω model <strong>to</strong> the<br />
subgrid. A further attempt was made <strong>to</strong> mix a k-ω subgrid with a k-ε main<br />
grid, but the development effort was s<strong>to</strong>pped when it became clear that dif-<br />
ferences in the predicted values of k would necessitate the use of a blending<br />
function similar <strong>to</strong> that used by the SST [42].<br />
Building upon the use of k-ω, future work could be directed <strong>to</strong>wards the<br />
use of simpler turbulence models, particularly a one-equation model and an<br />
algebraic model within the subgrid. If this can be done while retaining a<br />
k-ε treatment in the main grid, then the adapted subgrid would offer an<br />
additional level of flexibility in the cost/accuracy tradeoff associated with it.<br />
Furthermore, the <strong>UMIST</strong>-N wall function could be applied <strong>to</strong> a further va-<br />
riety of flows. Most notably, higher Reynolds numbers could be considered.<br />
<strong>The</strong>re is a difficulty in obtaining DNS results at higher Reynolds numbers,<br />
but perhaps the completion of this work will allow the subgrid approach <strong>to</strong><br />
be confidently compared <strong>to</strong> experiments for periodic flow at higher Reynolds<br />
numbers. Also, this work applies the subgrid treatment <strong>to</strong> periodic flow at<br />
a relatively low frequency of oscillation and without sufficient amplitude <strong>to</strong><br />
generate flow reversal. A higher frequency and a larger amplitude would<br />
provide an interesting test case, provided that suitable data can be found<br />
for comparison. Such a test case would advise as <strong>to</strong> the applicability of<br />
<strong>UMIST</strong>-N <strong>to</strong> the flow inside engines.<br />
In a two-dimensional grid, the <strong>UMIST</strong>-N method involves simultaneously<br />
s<strong>to</strong>ring subgrid results throughout the flow field. In addition <strong>to</strong> a s<strong>to</strong>rage<br />
cost, this presents an added complexity in the implementation of the method.
CHAPTER 6. CONCLUSIONS & SUGGESTIONS FOR FUTURE WORK86<br />
An attempt could be made <strong>to</strong> reduce this s<strong>to</strong>rage requirement and allow the<br />
subgrid treatment on a given main grid cell <strong>to</strong> run as a self-contained function.<br />
If this can be done without a prohibitive sacrifice of accuracy, it could further<br />
broaden the industrial usefulness of <strong>UMIST</strong>-N.
Bibliography<br />
[1] Addad, Y., Application of eddy viscosity and stress transport models<br />
in periodic channel flow, PhD thesis, University of Manchester Institute<br />
of Science and Technology (<strong>UMIST</strong>), 2000.<br />
[2] Ahmadi-Befrui, B., Arcoumanis, C., Bicen, A. F., Gossman, A. D., Ja-<br />
hanbakhsh, A., & Whitelaw, J. H., Calculations and measurements<br />
of the flow in a mo<strong>to</strong>red model engine and implications for open-<br />
chamber direct injection engines, ASME, Three-dimensional turbulent<br />
shear flows, pp. 1-9, 1982.<br />
[3] Amano, R. S., Development of a turbulence near-wall model and its ap-<br />
plication <strong>to</strong> separated and reattached flows, Numerical Heat Transfer,<br />
vol. 7, p. 59-75, 1984.<br />
[4] An<strong>to</strong>nia, R. A. & Kim, J., Low-Reynolds-number effects on near-wall<br />
turbulence, Journal of Fluid Mechanics, vol. 276, pp. 61-80, 1994.<br />
[5] Balaras, E., Benocci, C., & Piomelli, U., Two-layer approximate<br />
boundary condition large-eddy simulations, AIAA Journal, vol. 34, pp.<br />
1111-1119, 1996.<br />
87
BIBLIOGRAPHY 88<br />
[6] Boussinesq, J., Théorie de l’écoulement <strong>to</strong>urbillant, Mém. Prés. par<br />
div. savant à L’Academie Scientifique de Paris, vol. 23, p. 46, 1877.<br />
[7] Boyer, V. & Laurence, D., A shape function wall function approach<br />
for high and low Reynolds near-wall turbulence models, International<br />
Journal of Numerical Methods in Fluids, vol. 40, pp. 241-251, 2002.<br />
[8] Chapman, D. R. & Kuhn, G. D., <strong>The</strong> limiting behaviour of turbulence<br />
near a wall, Journal of Fluid Mechanics, vol. 170, pp. 265-292, 1986.<br />
[9] Chou, P. Y., On the velocity correlations and the solution of the equa-<br />
tions of turbulent fluctuation, Quarterly <strong>Applied</strong> Mathematics, vol. 3,<br />
p. 38, 1945.<br />
[10] Coakley, T. J., Turbulence modelling methods for the compressible<br />
Navier-S<strong>to</strong>kes equations, AIAA, no. 83-1693, 1983.<br />
[11] Comte-Bellot, G.,<br />
Écoulement turbulent entre deux parios paralleles,<br />
Publications Scientifiques et Techniques du Ministère de l’Air, vol. 419,<br />
1965.<br />
[12] Cot<strong>to</strong>n, M. A. & Ismael, J. O., An examination of periodic turbulent<br />
pipe flow using a low-Reynolds-number k-ε turbulence model, Pro-<br />
ceedings of the 8th Symposium on Turbulent Shear <strong>Flow</strong>s, Techhnical<br />
University of Munich, no. III-6, 1998.<br />
[13] Cot<strong>to</strong>n, M. A., Craft, T. J., Guy, A. W., & Launder, B. E., On mod-<br />
elling periodic motion with turbulence closures, <strong>Flow</strong>, Turbulence and<br />
Combustion, vol. 67, pp. 143-158, 2001.
BIBLIOGRAPHY 89<br />
[14] Craft, T. J., Launder, B. E., & Suga, K., Development and application<br />
of a cubic eddy-viscosity model of turbulence, International Journal of<br />
Heat and Fluid <strong>Flow</strong>, vol. 17, pp. 108-115, 1996.<br />
[15] Craft, T. J., Developments in a low-Reynolds-number second-moment<br />
closure and its application <strong>to</strong> separating and reattaching flows, Inter-<br />
national Journal of Heat and Fluid <strong>Flow</strong>, vol. 19, pp. 541-548, 1998.<br />
[16] Craft, T.J., Gant S.E., Iacovides, H., Launder B.E. & Robinson,<br />
C.M.E., Computational study of flow around the ”Ahmed” car body<br />
(case 9.4), 9th ERCOFTAC/IAHR/COST Workshop on Refined Tur-<br />
bulence Modelling, Darmstadt, Germany, 2001.<br />
[17] Craft, T.J., Gerasimov, A. V, Iacovides, H., and Launder B.E.,<br />
Progress in the generalization of wall-function treatments, Interna-<br />
tional Journal of Heat and Fluid <strong>Flow</strong>, vol. 23, pp. 148-160, 2002.<br />
[18] Craft, T.J., Gant S.E., Iacovides, H., and Launder B.E., A new wall<br />
function strategy for complex turbulent flows, Numerical Heat Transfer<br />
Part B: Fundamentals, vol. 45, no. 4, pp. 301-318, 2004.<br />
[19] Davidov, B. I., On the statistical dynamics of an incompressible tur-<br />
bulent fluid, Dokl. Akad. Nauk SSSR, vol. 136, pp. 47-50, 1987.<br />
[20] Ferziger, J. H., & Perić, M., Computational Methods for Fluid Dynam-<br />
ics, Springer, London, 2002.<br />
[21] Gant, S. E., Development and application of a new wall function for<br />
complex turbulent flows, PhD thesis, University of Manchester Institute<br />
of Science and Technology (<strong>UMIST</strong>), 2002.
BIBLIOGRAPHY 90<br />
[22] Hanjalic, K. & Launder, B. E., Contribution <strong>to</strong>wards a Reynolds-stress<br />
closure for low-Reynolds-number turbulence, Journal of Fluid Mechan-<br />
ics, vol. 74, pp. 593-610, 1976.<br />
[23] Harlow, F. H., & Nakayama, P. I., Transport of turbulence energy<br />
decay rate, Los Alamos Science Labora<strong>to</strong>ries, University of California<br />
Report, no. LA-3854, 1968.<br />
[24] Hino, M., Kashiwayanagi, M., Nakayama, A., & Hara, T., Experiments<br />
on the turbulence statistics and the structure of a reciprocating oscil-<br />
la<strong>to</strong>ry flow, Journal of Fluid Mechanics, vol. 131, pp. 363-400, 1983.<br />
[25] Iacovides, H. & Launder, B. E., PSL - an economical approach <strong>to</strong> the<br />
numerical analysis of near-wall elliptic flows, ASME Journal of Fluids<br />
Engineering, vol. 106, p. 241, 1984.<br />
[26] Jensen, B. L., Sumer, B. M., & Fredsoe, J., Turbulent oscilla<strong>to</strong>ry<br />
boundary lauers at high reynolds numbers, Journal of Fluid Mechanics,<br />
vol. 206, pp. 265-297, 1989.<br />
[27] Jones, W. P., & Launder, B. E., <strong>The</strong> prediction of laminarization with<br />
a two-equation model of turbulence, International Journal of Heat and<br />
Mass Transfer, vol. 15, pp. 301-314, 1972.<br />
[28] von Kármán, T., Mechanische Ähnlichkeit und Turbulenz, Proceedings<br />
3rd Int. Congr. <strong>Applied</strong> Mechanics, S<strong>to</strong>ckholm, pp. 85-105, 1930.<br />
[29] Kawamura, H., & Homma, K., DNS of an unsteady turbulent flow<br />
driven by a temporally sinusoidal pressure gradient, Turbulence and<br />
Shear <strong>Flow</strong> - 1, pp. 175-180, Begell House, New York, 1999.
BIBLIOGRAPHY 91<br />
[30] Kim J., Moin P., & Moser, R. D., Turbulence statistics in fully devel-<br />
oped channel flow at low Reynolds number, Journal of Fluid Mechan-<br />
ics, vol. 177, pp. 133-166, 1987.<br />
[31] Kolmogorov, A. N., Equations of turbulent motion of an incompressible<br />
turbulent fluid, Izv. Akad. Nauk SSSR Ser Phys., vol. 6, no. 1-2, p. 56,<br />
1942.<br />
[32] Labourasse, E. & Sagaut, P., Reconstruction of turbulent fluctua-<br />
tions using a hybrid RANS/LES approach, Journal of Computational<br />
Physics, vol. 182, pp. 301-336, 2002.<br />
[33] Launder, B. E. & Sharma, B. I., Application of the energy-dissipation<br />
model of turbulence <strong>to</strong> the calculation of flow near a spinning disk,<br />
Letters in Heat and Mass Transfer, vol. 1, pp. 131-137, 1974.<br />
[34] Launder, B. E. & Spalding, D. B., <strong>The</strong> numerical computation of turbu-<br />
lent flows, Computer Methods in <strong>Applied</strong> Mechanics and Engineering,<br />
vol. 3, pp. 269-289, 1974.<br />
[35] Lea, C. J., Second-moment closure computations of in-cylinder flows in<br />
idealised reciprocating engines, PhD <strong>The</strong>sis, University of Manchester,<br />
1994.<br />
[36] Lee, D.-Y., Park, S.-J., & Ro, S. T., Heat transfer by oscillating flow<br />
in a circular pipe with a sinusoidal wall temperature distribution, In-<br />
ternational Journal of Heat and Mass Transfer, vol. 38, pp. 2529-2537,<br />
1995.<br />
[37] Leonard, B. P., A stable and accurate convective modelling procedure<br />
based on quadratic upstream interpolation, Computer Methods in Ap-<br />
plied Mechanics and Engineering, vol. 19, pp. 59-98, 1979.
BIBLIOGRAPHY 92<br />
[38] Lodahl, C. R., Sumer, B. M., & Fredsoe, J., Turbulent combined os-<br />
cilla<strong>to</strong>ry flow and current in a pipe, Journal of Fluid Mechanics, vol.<br />
373, pp. 313-348, 1998.<br />
[39] Mansour, N. N., Kim, J., & Moin, P., Reynolds-stress and dissipation-<br />
rate budgets in a turbulent channel flow, Journal of Fluid Mechanics,<br />
vol. 194, pp. 15-44, 1988.<br />
[40] Menter, F. R., Influence of freestream values on k-ω turbulence model<br />
predictions, AIAA Journal, vol. 30, no. 6, pp. 1657-1659, 1992.<br />
[41] Menter, F. R., Improved two-equation k-ω turbulence models for aero-<br />
dynamic flows, NASA, no. TM-103975, 1992.<br />
[42] Menter, F. R., Two-equation eddy-viscosity turbulence models for en-<br />
gineering applications, AIAA Journal, vol. 32, pp. 1598-1605, 1994.<br />
[43] Monin, A. S. & Yaglom, A. M., Statistical Fluid Mechanics: Mechanics<br />
of Turbulence, vol. 2, MIT Press, 1975.<br />
[44] Moser, R. D., Kim, J., & Mansour, N. N., Direct numerical simulation<br />
of turbulent channel flow up <strong>to</strong> Retau=590, Physics of Fluids, vol. 11,<br />
pp. 943-945, 1999.<br />
[45] Nai<strong>to</strong>h, K. & Kuwahara, K., Large Eddy Simulation and direct simula-<br />
tion of compressible turbulence and combusting flows in engines based<br />
on the Biscales method, Fluid Dynamics Research, vol. 10, no. 4-6, pp.<br />
299-325, 1992.<br />
[46] Ng, K. H. & Spalding, D. B., Turbulence model for boundary layers<br />
near walls, Physics of Fluids, vol. 15, no. 1, pp. 20-30, 1972.
BIBLIOGRAPHY 93<br />
[47] Niederschulte, M. A., Adrian, R. J., & Hanratty, T. J., Measurements<br />
of turbulent flow in a channel at low Reynolds number, Experiments in<br />
Fluids, vol. 9, pp. 222-230, 1990.<br />
[48] Ohmi, M. & Iguchi, M., Critical Reynolds number in an oscillating pipe<br />
flow, Bulletin of the JSME, vol. 25, no. 200, pp. 165-172, 1982.<br />
[49] Ohmi, M., Iguchi, M. & Urahata, I., Transition <strong>to</strong> turbulence in a<br />
pulsatile pipe flow part 1: wave forms and distribution of pulsatile<br />
velocities near transition region, Bulletin of the JSME, vol. 25, no.<br />
200, pp. 182-189, 1982.<br />
[50] Ohmi, M., Iguchi, M. & Urahata, I., <strong>Flow</strong> patterns and frictional losses<br />
in an oscillating pipe flow, Bulletin of the JSME, vol. 25, no. 200, pp.<br />
536-543, 1982.<br />
[51] Patankar, S. V., Numerical Heat Transfer and Fluid <strong>Flow</strong>, Series in<br />
Computational Methods in Mechanics and <strong>The</strong>rmal Sciences, Hemi-<br />
sphere Publishing Corp., McGraw-Hill, 1980.<br />
[52] Peng, S.-H., Davidson, L., & Holmberg, S., A modified low-Reynolds<br />
number k-ω model for recirculating flows, Journal of Fluids Engineer-<br />
ing, vol. 119, pp. 867-875, 1997.<br />
[53] Pope, S. B., Turbulent <strong>Flow</strong>s, Cambridge University Press, Cambridge,<br />
UK, 2000.<br />
[54] Prandtl, L., Über die ausgebildete turbulenz, ZAMM, vol. 5, pp. 136-<br />
139, 1925.<br />
[55] Prandtl, L., Über ein neues formelsystem der ausgebildeten turbulenz,<br />
Nachr. Akad. Wiss. Göttingen, pp. 6-19, 1945.
BIBLIOGRAPHY 94<br />
[56] Quemere, P., Zonal multi-domain RANS/LES simulations of turbulent<br />
flows, International Journal for Numerical Methods in Fluids, vol. 40,<br />
pp. 903-925, 2002.<br />
[57] Ramaprian, B. R. & Tu, S. W., Fully developed periodic turbulent<br />
pipe flow part 2: the detailed structure of the flow, Journal of Fluid<br />
Mechanics, vol. 137, pp. 59-81, 1983.<br />
[58] Reichardt, H., Vollstandige darstellung der turbulenten<br />
geschwindigkeitsverteilung in glatten leitungen, Zeitschrift für<br />
Angewandte Mathematik und Mechanik, vol. 31, pp. 208-219, 1951.<br />
[59] Reynolds, O., On the dynamical theory of incompressible viscous fluids<br />
and determination of the criterion, Philosophical Transactions of the<br />
Royal Society of London, serries A, vol. 186, pp. 123-164, 1895.<br />
[60] Reynolds, W. C., modelling of fluid motion in engines: an introduc-<br />
<strong>to</strong>ry review, Combustion modelling in Reciprocating Engines, Plenum<br />
Press, New York, pp. 41-68, 1980.<br />
[61] Robinson, D. F., Harris, J. E., & Hassan, H. A., Unified turbulence clo-<br />
sure model for axisymmetric and planar free shear flows, AIAA Journal,<br />
vol. 33, no. 12, pp. 2324-2331, 1995.<br />
[62] Rodi, W. & Spalding, D. B., A two parameter model of turbulence and<br />
its application <strong>to</strong> free jets, Wärme und S<strong>to</strong>ffübertragung, vol. 3, p. 85,<br />
1970.<br />
[63] Rotta, J. C., Statistische theorie nichthomogener turbulenz, Zeitschrift<br />
für Physik, vol. 129, pp. 547-572, 1951.
BIBLIOGRAPHY 95<br />
[64] Rotta, J. C.,<br />
Über eine methode zur berechnung turbulenter scher-<br />
strömungen, Aerodynamische Versuchanstalt Göttingen, Rep. 69 A 14,<br />
1968.<br />
[65] Saffman, P. G., A model for inhomogeneous turbulent flow, Proceedings<br />
of the Royal Society of London, vol. A317, pp. 417-433, 1970.<br />
[66] Sarpkaya, T., Experimental determination of the critical Reynolds<br />
number for pulsating poiseuille flow Transactions of the ASME: Jour-<br />
nal of Basic Engineering, no. 66-FE-5, 1966.<br />
[67] Scotti, A. & Piomelli, U., Numerical simulation of pulsating turbulent<br />
channel flow, American Institute of Physics, vol. 13, no. 5, pp. 1367-<br />
1384, 2001.<br />
[68] Shemer, L., Wygnanski, I., & Kit, E., Pulsating flow in a pipe, Journal<br />
of Fluid Mechanics, vol. 153, pp. 313-337, 1985.<br />
[69] Shima, N., Calculation of a variety of boundary layers with a second-<br />
moment closure applicable up <strong>to</strong> a wall, 7th Symposium on Turbulent<br />
Shear <strong>Flow</strong>s, Stanford University, Paper 5-3, 1989.<br />
[70] Siginer, A., Oscillating flow of a simple fluid in a pipe, International<br />
Journal of Engineering Science, vol. 29, no. 12, pp. 1557-1567, 1991.<br />
[71] Sleath, J. F. A., Turbulent oscilla<strong>to</strong>ry flow over rough beds, Journal of<br />
Fluid Mechanics, vol. 182, pp. 369-409, 1987.<br />
[72] Smith, B. R., <strong>The</strong> k-kl turbulence model and wall layer model for<br />
compressible flows, AIAA Paper, no. 90-1483, 1990.<br />
[73] Spalart, P. R., A one-equation turbulence model for aerodynamic flows,<br />
AIAA Paper, no. 92-439, 1992.
BIBLIOGRAPHY 96<br />
[74] Spalding, D. B., <strong>The</strong> calculation of the length scale of turbulence in<br />
some turbulent boundary layers remote from walls, Imperial College,<br />
Heat Transfer Section Report, no. TWF/TN/31, 1967.<br />
[75] Spalding, D.B., <strong>The</strong> prediction of two-dimensional steady turbulent<br />
flows, Imperial College, Heat and Mass Transfer Section Report, no.<br />
EF/TN/A/16, 1969.<br />
[76] Speziale, C. G., Abid, R., & Anderson, E. C., A critical evaluation<br />
of two-equation models for near wall turbulence, AIAA Paper, no. 90-<br />
1481, 1990.<br />
[77] Suga, K., Development and application of a non-linear eddy viscosity<br />
model sensitized <strong>to</strong> stress and strain invariants, PhD thesis, University<br />
of Manchester Institute of Science and Technology (<strong>UMIST</strong>), 1995.<br />
[78] Tabaczynski, R. J., Turbulent flows in reciprocating internal combus-<br />
tion engines, Internal Combustion Engineering: Science and Technol-<br />
ogy, pp. 243-285, 1990.<br />
[79] Tardu, S. F., Binder, G., & Blackwelder, R. F., Turbulent channel flow<br />
with large-amplitude velocity oscillations, Journal of Fluid Mechanics,<br />
vol. 267, pp. 109-151, 1994.<br />
[80] Taylor, G. I., Eddy motion in the atmosphere, Philosophical Transac-<br />
tions of the Royal Society of London, serries A, p. 215, 1915.<br />
[81] Townsend, A. A., <strong>The</strong> Structure of Turbulent Shear <strong>Flow</strong>, Cambridge<br />
University Press, 1956.
BIBLIOGRAPHY 97<br />
[82] Tu, S. W. & Ramaprian, B. R., Fully developed periodic turbulent<br />
pipe flow part 1: main experimental results and comparison with pre-<br />
dictions, Journal of Fluid Mechanics, vol. 137, pp. 31-58, 1983.<br />
[83] Versteeg, H. K. & Malalasekera, W., An Introduction <strong>to</strong> Computational<br />
Fluid Dynamics: <strong>The</strong> Finite Volume Method, Pearson Education, Ltd.,<br />
Harlow, UK, 1995.<br />
[84] Viegas, J. R. & Rubesin, M. W., <strong>Wall</strong>-function boundary conditions in<br />
the solution of the Navier-S<strong>to</strong>kes equations for complex compressible<br />
flows, AIAA, 16th Fluid & Plasma Dynamics Conference, MA, USA,<br />
1983.<br />
[85] Walther, C., Kühl, H.-D., & Schulz, S., Numerical investigations on<br />
the heat transfer in turbulent oscillating pipe flow, Journal of Heat<br />
and Mass Transfer, vol. 36, pp. 135-141, 2000.<br />
[86] Watkins, A. P., Calculation of flow and heat transfer in the combustion<br />
chamber of a reciprocating engine, MSc <strong>The</strong>sis, Imperial College of<br />
Science, Technology, & Medicine, University of London, 1973.<br />
[87] Wei, T. & Willmarth, W. W., Reynolds number effects on the structure<br />
of a turbulent channel flow, Journal of Fluid Mechanics, vol. 204, pp.<br />
57-95, 1989.<br />
[88] Wilcox, D. C., Rubesin, W. M., Progress in turbulence modelling for<br />
complex flow fields including effects of compressibility, NASA Technical<br />
Paper, no. 1517, 1980.<br />
[89] Wilcox, D. C., Reassessment of the scale-determining equation for ad-<br />
vanced turbulence models, AIAA Journal, vol. 26, no. 11, pp. 1299-<br />
1310, 1988.
BIBLIOGRAPHY 98<br />
[90] Wilcox, D. C., Two-equation eddy-viscosity turbulence models for en-<br />
gineering applications, AIAA Journal, vol. 32, no. 8, pp. 1598-1605,<br />
1994.<br />
[91] Wilcox, D. C., Turbulence modelling for CFD, 2nd ed., DCW Indus-<br />
tries, La Cañada, California, 1998.<br />
[92] Yap, C. R., Turbulent heat and momentum transfer in recirculating<br />
and impinging flows, PhD <strong>The</strong>sis, University of Manchester, 1987.
Figures<br />
99
FIGURES 100<br />
U +<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
10 0<br />
10 1<br />
+<br />
+<br />
+<br />
+<br />
Reichardt’s law<br />
DNS: Reτ = 180 [30]<br />
DNS: Reτ = 395 [44]<br />
DNS: Reτ = 584 [44]<br />
◦ Exp.: Reτ = 708 [87]<br />
▽ Exp.: Reτ = 921 [47]<br />
+<br />
10 2<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
x +<br />
x<br />
x xxx<br />
x<br />
x<br />
x +<br />
x +<br />
+<br />
10 3<br />
y +<br />
10 4<br />
Exp.: Reτ = 1017 [47]<br />
+ Exp.: Reτ = 1655 [47]<br />
⋄ Exp.: Reτ = 2340 [11]<br />
× Exp.: Reτ = 4800 [11]<br />
△ Exp.: Reτ = 8150 [11]<br />
Figure 3.1: Reichardt’s law <strong>to</strong> estimate U +
FIGURES 101<br />
− 〈uv〉 +<br />
1.0<br />
0.9<br />
0.8<br />
0.7<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
0.0<br />
-0.1<br />
+ + +<br />
+ +<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
10 1<br />
Reichardt: Reτ = 180<br />
Reichardt: Reτ = 584<br />
Reichardt: Reτ = 1017<br />
Reichardt: Reτ = 1655<br />
+<br />
+<br />
x<br />
x<br />
x<br />
+<br />
+<br />
+<br />
++++++++++++++++++++++++++++++++<br />
x x x x<br />
+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++<br />
x<br />
x<br />
x<br />
x<br />
x<br />
10 2<br />
x<br />
x<br />
y +<br />
10 3<br />
DNS: Reτ = 180 [30]<br />
+ DNS: Reτ = 584 [44]<br />
⋄ Exp.: Reτ = 1017 [47]<br />
× Exp.: Reτ = 1655 [47]<br />
Figure 3.2: Reichardt’s law applied <strong>to</strong> − 〈uv〉 +
FIGURES 102<br />
− 〈uv〉 +<br />
1.0<br />
0.9<br />
0.8<br />
0.7<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
0.0<br />
-0.1<br />
+ + +<br />
+ +<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
10 1<br />
Profile: Reτ = 180<br />
Profile: Reτ = 584<br />
Profile: Reτ = 1017<br />
Profile: Reτ = 1655<br />
+<br />
+<br />
x<br />
x<br />
x<br />
+<br />
+<br />
+<br />
++++++++++++++++++++++++++++++++<br />
x x x x<br />
+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++<br />
x<br />
x<br />
x<br />
x<br />
x<br />
10 2<br />
x<br />
x<br />
y +<br />
10 3<br />
DNS: Reτ = 180 [30]<br />
+ DNS: Reτ = 584 [44]<br />
⋄ Exp.: Reτ = 1017 [47]<br />
× Exp.: Reτ = 1655 [47]<br />
Figure 3.3: A revised profile for − 〈uv〉 +
FIGURES 103<br />
k +<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
10 0<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
10 1<br />
Profile: Reτ = 180<br />
Profile: Reτ = 395<br />
Profile: Reτ = 584<br />
+<br />
+<br />
+ + +<br />
+++++++++++++++++++++++++++++++++ +++++++++++++++++++++++++++<br />
+<br />
10 2<br />
Figure 3.4: A profile for k +<br />
10 3<br />
y +<br />
DNS: Reτ = 180 [30]<br />
+ DNS: Reτ = 395 [44]<br />
⋄ DNS: Reτ = 584 [44]
FIGURES 104<br />
〈uu〉 9<br />
+<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
10 0<br />
+<br />
10 1<br />
Profile: Reτ = 180<br />
Profile: Reτ = 395<br />
Profile: Reτ = 584<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
10 2<br />
+<br />
+<br />
+<br />
+<br />
+<br />
10 3<br />
y +<br />
DNS: Reτ = 180 [30]<br />
+ DNS: Reτ = 395 [44]<br />
⋄ DNS: Reτ = 584 [44]<br />
Figure 3.5: A profile for 〈uu〉 +
FIGURES 105<br />
1.4<br />
〈vv〉 +<br />
1.2<br />
1.0<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0.0<br />
10 0<br />
+<br />
10 1<br />
Profile: Reτ = 180<br />
Profile: Reτ = 395<br />
Profile: Reτ = 584<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+ +<br />
+<br />
10 2<br />
+<br />
+<br />
+<br />
+<br />
+<br />
10 3<br />
y +<br />
DNS: Reτ = 180 [30]<br />
+ DNS: Reτ = 395 [44]<br />
⋄ DNS: Reτ = 584 [44]<br />
Figure 3.6: A profile for 〈vv〉 +
FIGURES 106<br />
0.20<br />
k +<br />
“<br />
y +” 2<br />
0.15<br />
0.10<br />
0.05<br />
0.20<br />
〈uu〉 +<br />
“<br />
y +” 2<br />
0.00<br />
0 2 4 6 8 10<br />
0.15<br />
0.10<br />
0.05<br />
y +<br />
0.00<br />
0 2 4 6 8 10<br />
y +<br />
−〈uv〉 +<br />
“<br />
y +” 3<br />
〈vv〉 +<br />
“<br />
y +” 4<br />
0.0020<br />
0.0015<br />
0.0010<br />
0.0005<br />
0.0000<br />
0 2 4 6 8 10<br />
0.00020<br />
0.00015<br />
0.00010<br />
0.00005<br />
y +<br />
0.00000<br />
0 2 4 6 8 10<br />
▽ DNS: Reτ = 180 [30]<br />
⋄ DNS: Reτ = 395 [44]<br />
△ DNS: Reτ = 584 [44]<br />
Figure 3.7: <strong>Near</strong>-wall behaviour of flow parameters<br />
y +
FIGURES 107<br />
y ∗<br />
y ∗<br />
600<br />
500<br />
400<br />
300<br />
200<br />
100<br />
0<br />
0 100 200 300 400 500 600<br />
100<br />
80<br />
60<br />
40<br />
20<br />
y +<br />
0<br />
0 20 40 60 80 100<br />
y +<br />
▽ DNS: Reτ = 180 [30]<br />
⋄ DNS: Reτ = 395 [44]<br />
△ DNS: Reτ = 584 [44]<br />
y ∗ = y +<br />
Figure 3.8: y ∗ vs. y +
FIGURES 108<br />
U ∗<br />
or<br />
U +<br />
25<br />
20<br />
15<br />
10<br />
5<br />
++++++++++++++++++++++++++++++++++++++++++++<br />
+++++++++++++++++++++++++++++++++++++++++<br />
+++<br />
xxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxx x xxxxxxxx<br />
0 + x<br />
0 100 200 300 400 500 600<br />
y∗ or y +<br />
U + vs. y + :<br />
▽ DNS: Reτ = 180 [30]<br />
⋄ DNS: Reτ = 395 [44]<br />
△ DNS: Reτ = 584 [44]<br />
U ∗ vs. y ∗ :<br />
✄✂ ✁ DNS: Reτ = 180 [30]<br />
+ DNS: Reτ = 395 [44]<br />
x DNS: Reτ = 584 [44]<br />
Figure 3.9: U ∗ superimposed on U +
FIGURES 109<br />
y ∗ v2<br />
y ∗ v2<br />
600<br />
500<br />
400<br />
300<br />
200<br />
100<br />
0<br />
0 100 200 300 400 500 600<br />
100<br />
80<br />
60<br />
40<br />
20<br />
y +<br />
0<br />
0 20 40 60 80 100<br />
y +<br />
▽ DNS: Reτ = 180 [30]<br />
⋄ DNS: Reτ = 395 [44]<br />
△ DNS: Reτ = 584 [44]<br />
y ∗ v2 = y +<br />
Figure 3.10: y ∗ v2 vs. y +
FIGURES 110<br />
U ∗ v2<br />
or<br />
U +<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
x<br />
+<br />
x<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
+<br />
++++++++++++++++++++++++++++++++ +++++++++++++++++++++++++++++++++++++++++++++++<br />
x<br />
x<br />
x<br />
x<br />
x<br />
x<br />
x<br />
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx<br />
5<br />
0 + x<br />
0 100 200 300 400 500 600<br />
y∗ v2 or y +<br />
U + vs. y + :<br />
▽ DNS: Reτ = 180 [30]<br />
⋄ DNS: Reτ = 395 [44]<br />
△ DNS: Reτ = 584 [44]<br />
U ∗ v2 vs. y ∗ v2:<br />
✄✂ ✁ DNS: Reτ = 180 [30]<br />
+ DNS: Reτ = 395 [44]<br />
x DNS: Reτ = 584 [44]<br />
Figure 3.11: U ∗ v2 superimposed on U +
FIGURES 111<br />
〈U〉 +<br />
〈U〉 +<br />
20<br />
18<br />
16<br />
14<br />
12<br />
10<br />
8<br />
6<br />
4<br />
2<br />
0<br />
0 0.25 0.5 0.75 1<br />
20<br />
18<br />
16<br />
14<br />
12<br />
10<br />
8<br />
6<br />
4<br />
2<br />
a<br />
y/δ<br />
0<br />
0 0.25 0.5 0.75 1<br />
c<br />
y/δ<br />
〈U〉 +<br />
20<br />
18<br />
16<br />
14<br />
12<br />
10<br />
8<br />
6<br />
4<br />
2<br />
0<br />
0 0.25 0.5 0.75 1<br />
a {<br />
b{<br />
c {<br />
Figure 5.1: 〈U〉 + vs y/δ in the steady flow case<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
b<br />
y/δ<br />
k-ε with log law<br />
Subgrid k-ε<br />
Subgrid k-ε<br />
Subgrid k-ω<br />
✄✂ ✁ DNS [30]<br />
Reichardt’s law [58]
FIGURES 112<br />
k +<br />
k +<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
0 0.25 0.5 0.75 1<br />
5<br />
4<br />
3<br />
2<br />
1<br />
a<br />
y/δ<br />
0<br />
0 0.25 0.5 0.75 1<br />
c<br />
y/δ<br />
k +<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
0 0.25 0.5 0.75 1<br />
a {<br />
b{<br />
c {<br />
Figure 5.2: k + vs y/δ in the steady flow case<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
b<br />
y/δ<br />
k-ε with log law<br />
Subgrid k-ε<br />
Subgrid k-ε<br />
Subgrid k-ω<br />
✄✂ ✁ DNS [30]<br />
analytical profile
FIGURES 113<br />
〈U〉 +<br />
〈U〉 +<br />
20<br />
18<br />
16<br />
14<br />
12<br />
10<br />
8<br />
6<br />
4<br />
2<br />
10 0 0<br />
20<br />
18<br />
16<br />
14<br />
12<br />
10<br />
8<br />
6<br />
4<br />
2<br />
10 0 0<br />
10 1<br />
10 1<br />
c<br />
a<br />
10 2<br />
10 2<br />
y +<br />
y +<br />
.<br />
〈U〉 +<br />
20<br />
18<br />
16<br />
14<br />
12<br />
10<br />
8<br />
6<br />
4<br />
2<br />
10 0 0<br />
a {<br />
b{<br />
c {<br />
Figure 5.3: 〈U〉 + vs y + in the steady flow case<br />
10 1<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
b<br />
10 2<br />
k-ε with log law<br />
Subgrid k-ε<br />
Subgrid k-ε<br />
Subgrid k-ω<br />
y +<br />
✄✂ ✁ DNS [30]<br />
Reichardt’s law [58]
FIGURES 114<br />
k +<br />
k +<br />
5<br />
4<br />
3<br />
2<br />
1<br />
10 0 0<br />
5<br />
4<br />
3<br />
2<br />
1<br />
10 0 0<br />
10 1<br />
10 1<br />
a<br />
c<br />
10 2<br />
10 2<br />
y +<br />
y +<br />
k +<br />
5<br />
4<br />
3<br />
2<br />
1<br />
10 0 0<br />
a {<br />
b{<br />
c {<br />
Figure 5.4: k + vs y + in the steady flow case<br />
10 1<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
b<br />
10 2<br />
y +<br />
k-ε with log law<br />
Subgrid k-ε<br />
Subgrid k-ε<br />
Subgrid k-ω<br />
✄✂ ✁ DNS [30]<br />
analytical profile
FIGURES 115<br />
U<br />
U ss<br />
U<br />
U ss<br />
3.0 3.0<br />
2.5 2.5<br />
2.0 2.0<br />
1.5 1.5<br />
1.0 1.0<br />
0.5 0.5<br />
0.0 0.0<br />
-0.5 -0.5<br />
-1.0 -1.0<br />
-1.5 -1.5<br />
-2.0 -2.0<br />
0.0 0.5 1.0 1.5 2.0<br />
a<br />
period<br />
3.0 3.0<br />
2.5 2.5<br />
2.0 2.0<br />
1.5 1.5<br />
1.0 1.0<br />
0.5 0.5<br />
0.0 0.0<br />
-0.5 -0.5<br />
-1.0 -1.0<br />
-1.5 -1.5<br />
-2.0 -2.0<br />
0.0 0.5 1.0 1.5 2.0<br />
a {<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
b{<br />
✄✂ ✁ DNS [29] prescribed<br />
b<br />
period<br />
k-ε log law<br />
Subgrid k-ε<br />
Subgrid k-ω<br />
∂〈P 〉<br />
∂x<br />
( ∂〈P 〉<br />
∂x )<br />
( ∂〈P 〉<br />
∂x ) ss<br />
( ∂〈P 〉<br />
( ∂〈P 〉<br />
∂x ) ss<br />
Figure 5.5: Bulk flow variation in the periodic pressure case<br />
∂x )<br />
× 10 −1<br />
× 10 −1
FIGURES 116<br />
τw<br />
(τw) ss<br />
τw<br />
(τw) ss<br />
3.0 3.0<br />
2.5 2.5<br />
2.0 2.0<br />
1.5 1.5<br />
1.0 1.0<br />
0.5 0.5<br />
0.0 0.0<br />
-0.5 -0.5<br />
-1.0 -1.0<br />
-1.5 -1.5<br />
-2.0 -2.0<br />
0.0 0.5 1.0 1.5 2.0<br />
a<br />
period<br />
3.0 3.0<br />
2.5 2.5<br />
2.0 2.0<br />
1.5 1.5<br />
1.0 1.0<br />
0.5 0.5<br />
0.0 0.0<br />
-0.5 -0.5<br />
-1.0 -1.0<br />
-1.5 -1.5<br />
-2.0 -2.0<br />
0.0 0.5 1.0 1.5 2.0<br />
a {<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
b{<br />
✄✂ ✁ DNS [29] prescribed<br />
b<br />
period<br />
k-ε log law<br />
Subgrid k-ε<br />
Subgrid k-ω<br />
∂〈P 〉<br />
∂x<br />
( ∂〈P 〉<br />
( ∂〈P 〉<br />
∂x ) ss<br />
∂x )<br />
( ∂〈P 〉<br />
( ∂〈P 〉<br />
∂x ) ss<br />
∂x )<br />
Figure 5.6: <strong>Wall</strong> shear stress variation in the periodic pressure case<br />
× 10 −1<br />
× 10 −1
FIGURES 117<br />
〈U〉<br />
(Uτ ) ss<br />
k<br />
(U 2 τ ) ss<br />
40<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
0 π/2 π 3π/2 2π<br />
10<br />
9<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
phase angle<br />
0<br />
0 π/2 π 3π/2 2π<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
phase angle<br />
Subgrid k-ω<br />
✄✂ ✁ DNS [29]<br />
Figure 5.7: Variables with time at y/δ = 0.1 (prescribed<br />
∂〈P 〉<br />
∂x )
FIGURES 118<br />
〈U〉<br />
(Uτ ) ss<br />
k<br />
(U 2 τ ) ss<br />
40<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
0 π/2 π 3π/2 2π<br />
10<br />
9<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
phase angle<br />
0<br />
0 π/2 π 3π/2 2π<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
phase angle<br />
Subgrid k-ω<br />
k-ε log law<br />
Figure 5.8: Variables with time at y/δ = 0.2 (prescribed<br />
∂〈P 〉<br />
∂x )
FIGURES 119<br />
〈U〉<br />
(Uτ ) ss<br />
k<br />
(U 2 τ ) ss<br />
40<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
0 π/2 π 3π/2 2π<br />
10<br />
9<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
phase angle<br />
0<br />
0 π/2 π 3π/2 2π<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
phase angle<br />
Subgrid k-ω<br />
k-ε log law<br />
Figure 5.9: Variables with time at y/δ = 0.5 (prescribed<br />
∂〈P 〉<br />
∂x )
FIGURES 120<br />
〈U〉<br />
(Uτ ) ss<br />
k<br />
(U 2 τ ) ss<br />
40<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
0 π/2 π 3π/2 2π<br />
10<br />
9<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
phase angle<br />
0<br />
0 π/2 π 3π/2 2π<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
phase angle<br />
Subgrid k-ω<br />
k-ε log law<br />
Figure 5.10: Variables with time at y/δ = 0.9 (prescribed<br />
∂〈P 〉<br />
∂x )
FIGURES 121<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
phase angle = 0<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
30<br />
20<br />
10<br />
y/δ<br />
phase angle = π<br />
2<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
phase angle = π<br />
4<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
30<br />
20<br />
10<br />
Subgrid k-ω<br />
k-ε log law<br />
Figure 5.11: 〈U〉 vs y/δ snapshots through time (prescribed<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
phase angle = 3π<br />
4<br />
∂〈P 〉<br />
) - part 1<br />
∂x<br />
y/δ
FIGURES 122<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
phase angle = π<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
30<br />
20<br />
10<br />
y/δ<br />
phase angle = 3π<br />
2<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
phase angle = 5π<br />
4<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
30<br />
20<br />
10<br />
Subgrid k-ω<br />
k-ε log law<br />
Figure 5.12: 〈U〉 vs y/δ snapshots through time (prescribed<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
phase angle = 7π<br />
4<br />
∂〈P 〉<br />
) - part 2<br />
∂x<br />
y/δ
FIGURES 123<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
5<br />
phase angle = 0<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
5<br />
y/δ<br />
phase angle = π<br />
2<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
Subgrid k-ω<br />
k-ε log law<br />
Figure 5.13: k vs y/δ snapshots through time (prescribed<br />
5<br />
phase angle = π<br />
4<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
5<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
phase angle = 3π<br />
4<br />
∂〈P 〉<br />
) - part 1<br />
∂x<br />
y/δ
FIGURES 124<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
5<br />
phase angle = π<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
5<br />
y/δ<br />
phase angle = 3π<br />
2<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
Subgrid k-ω<br />
k-ε log law<br />
Figure 5.14: k vs y/δ snapshots through time (prescribed<br />
5<br />
phase angle = 5π<br />
4<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
5<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
phase angle = 7π<br />
4<br />
∂〈P 〉<br />
) - part 2<br />
∂x<br />
y/δ
FIGURES 125<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
phase angle = 0<br />
10 1<br />
10 2<br />
y +<br />
phase angle = π<br />
2<br />
10 1<br />
10 2<br />
y +<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
Subgrid k-ω<br />
k-ε log law<br />
Figure 5.15: 〈U〉 vs y + snapshots through time (prescribed<br />
phase angle = π<br />
4<br />
10 1<br />
10 1<br />
10 2<br />
10 2<br />
y +<br />
phase angle = 3π<br />
4<br />
∂〈P 〉<br />
) - part 1<br />
∂x<br />
y +
FIGURES 126<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
phase angle = π<br />
10 1<br />
10 2<br />
y +<br />
phase angle = 3π<br />
2<br />
10 1<br />
10 2<br />
y +<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
Subgrid k-ω<br />
k-ε log law<br />
Figure 5.16: 〈U〉 vs y + snapshots through time (prescribed<br />
phase angle = 5π<br />
4<br />
10 1<br />
10 1<br />
10 2<br />
10 2<br />
y +<br />
phase angle = 7π<br />
4<br />
∂〈P 〉<br />
) - part 2<br />
∂x<br />
y +
FIGURES 127<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
5<br />
10 0<br />
0<br />
5<br />
10 0<br />
0<br />
phase angle = 0<br />
10 1<br />
10 2<br />
y +<br />
phase angle = π<br />
2<br />
10 1<br />
10 2<br />
y +<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
5<br />
10 0<br />
0<br />
10 0<br />
0<br />
Subgrid k-ω<br />
k-ε log law<br />
Figure 5.17: k vs y + snapshots through time (prescribed<br />
5<br />
phase angle = π<br />
4<br />
10 1<br />
10 1<br />
10 2<br />
10 2<br />
y +<br />
phase angle = 3π<br />
4<br />
∂〈P 〉<br />
) - part 1<br />
∂x<br />
y +
FIGURES 128<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
5<br />
10 0<br />
0<br />
5<br />
10 0<br />
0<br />
phase angle = π<br />
10 1<br />
10 2<br />
y +<br />
phase angle = 3π<br />
2<br />
10 1<br />
10 2<br />
y +<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
5<br />
10 0<br />
0<br />
10 0<br />
0<br />
Subgrid k-ω<br />
k-ε log law<br />
Figure 5.18: k vs y + snapshots through time (prescribed<br />
5<br />
phase angle = 5π<br />
4<br />
10 1<br />
10 1<br />
10 2<br />
10 2<br />
y +<br />
phase angle = 7π<br />
4<br />
∂〈P 〉<br />
) - part 2<br />
∂x<br />
y +
FIGURES 129<br />
( ∂〈P 〉<br />
∂x )<br />
( ∂〈P 〉<br />
∂x ) ss<br />
( ∂〈P 〉<br />
∂x )<br />
( ∂〈P 〉<br />
∂x ) ss<br />
25.0 25.0<br />
20.0 20.0<br />
15.0 15.0<br />
10.0 10.0<br />
5.0 5.0<br />
0.0 0.0<br />
-5.0 -5.0<br />
-10.0 -10.0<br />
-15.0 -15.0<br />
-20.0 -20.0<br />
0.0 0.5 1.0 1.5 2.0<br />
a<br />
period<br />
25.0 25.0<br />
20.0 20.0<br />
15.0 15.0<br />
10.0 10.0<br />
5.0 5.0<br />
0.0 0.0<br />
-5.0 -5.0<br />
-10.0 -10.0<br />
-15.0 -15.0<br />
-20.0 -20.0<br />
0.0 0.5 1.0 1.5 2.0<br />
a {<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
DNS<br />
∂〈P 〉<br />
∂x [29]<br />
b{<br />
b<br />
period<br />
k-ε log law<br />
Subgrid k-ε<br />
Subgrid k-ω<br />
Figure 5.19: Pressure variation in the periodic bulk flow
FIGURES 130<br />
τw<br />
(τw) ss<br />
τw<br />
(τw) ss<br />
3.0 3.0<br />
2.5 2.5<br />
2.0 2.0<br />
1.5 1.5<br />
1.0 1.0<br />
0.5 0.5<br />
0.0 0.0<br />
-0.5 -0.5<br />
-1.0 -1.0<br />
-1.5 -1.5<br />
-2.0 -2.0<br />
0.0 0.5 1.0 1.5 2.0<br />
a<br />
period<br />
3.0 3.0<br />
2.5 2.5<br />
2.0 2.0<br />
1.5 1.5<br />
1.0 1.0<br />
0.5 0.5<br />
0.0 0.0<br />
-0.5 -0.5<br />
-1.0 -1.0<br />
-1.5 -1.5<br />
-2.0 -2.0<br />
0.0 0.5 1.0 1.5 2.0<br />
a {<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
b{<br />
✄✂ ✁ DNS τw [29] DNS<br />
b<br />
period<br />
k-ε log law<br />
Subgrid k-ε<br />
Subgrid k-ω<br />
∂〈P 〉<br />
∂x [29]<br />
( ∂〈P 〉<br />
( ∂〈P 〉<br />
∂x ) ss<br />
∂x )<br />
( ∂〈P 〉<br />
( ∂〈P 〉<br />
∂x ) ss<br />
∂x )<br />
Figure 5.20: <strong>Wall</strong> shear stress variation in the periodic bulk flow case<br />
× 10 −1<br />
× 10 −1
FIGURES 131<br />
〈U〉<br />
(Uτ ) ss<br />
k<br />
(U 2 τ ) ss<br />
40<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
0 π/2 π 3π/2 2π<br />
10<br />
9<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
phase angle<br />
0<br />
0 π/2 π 3π/2 2π<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
phase angle<br />
Subgrid k-ω<br />
✄✂ ✁ DNS [29]<br />
Figure 5.21: Variables with time at y/δ = 0.1 (prescribed U)
FIGURES 132<br />
〈U〉<br />
(Uτ ) ss<br />
k<br />
(U 2 τ ) ss<br />
40<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
0 π/2 π 3π/2 2π<br />
10<br />
9<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
phase angle<br />
0<br />
0 π/2 π 3π/2 2π<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
phase angle<br />
Subgrid k-ω<br />
k-ε log law<br />
Figure 5.22: Variables with time at y/δ = 0.2 (prescribed U)
FIGURES 133<br />
〈U〉<br />
(Uτ ) ss<br />
k<br />
(U 2 τ ) ss<br />
40<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
0 π/2 π 3π/2 2π<br />
10<br />
9<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
phase angle<br />
0<br />
0 π/2 π 3π/2 2π<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
phase angle<br />
Subgrid k-ω<br />
k-ε log law<br />
Figure 5.23: Variables with time at y/δ = 0.5 (prescribed U)
FIGURES 134<br />
〈U〉<br />
(Uτ ) ss<br />
k<br />
(U 2 τ ) ss<br />
40<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
0 π/2 π 3π/2 2π<br />
10<br />
9<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
phase angle<br />
0<br />
0 π/2 π 3π/2 2π<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
phase angle<br />
Subgrid k-ω<br />
k-ε log law<br />
Figure 5.24: Variables with time at y/δ = 0.9 (prescribed U)
FIGURES 135<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
phase angle = 0<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
30<br />
20<br />
10<br />
y/δ<br />
phase angle = π<br />
2<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
phase angle = π<br />
4<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
30<br />
20<br />
10<br />
Subgrid k-ω<br />
k-ε log law<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
phase angle = 3π<br />
4<br />
Figure 5.25: 〈U〉 vs y/δ snapshots through time (prescribed U) - part 1<br />
y/δ
FIGURES 136<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
phase angle = π<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
30<br />
20<br />
10<br />
y/δ<br />
phase angle = 3π<br />
2<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
phase angle = 5π<br />
4<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
30<br />
20<br />
10<br />
Subgrid k-ω<br />
k-ε log law<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
phase angle = 7π<br />
4<br />
Figure 5.26: 〈U〉 vs y/δ snapshots through time (prescribed U) - part 2<br />
y/δ
FIGURES 137<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
5<br />
phase angle = 0<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
5<br />
y/δ<br />
phase angle = π<br />
2<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
Subgrid k-ω<br />
k-ε log law<br />
5<br />
phase angle = π<br />
4<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
5<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
phase angle = 3π<br />
4<br />
Figure 5.27: k vs y/δ snapshots through time (prescribed U) - part 1<br />
y/δ
FIGURES 138<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
5<br />
phase angle = π<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
5<br />
y/δ<br />
phase angle = 3π<br />
2<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
Subgrid k-ω<br />
k-ε log law<br />
5<br />
phase angle = 5π<br />
4<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
5<br />
0<br />
0.00 0.20 0.40 0.60 0.80<br />
y/δ<br />
phase angle = 7π<br />
4<br />
Figure 5.28: k vs y/δ snapshots through time (prescribed U) - part 2<br />
y/δ
FIGURES 139<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
phase angle = 0<br />
10 1<br />
10 2<br />
y +<br />
phase angle = π<br />
2<br />
10 1<br />
10 2<br />
y +<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
Subgrid k-ω<br />
k-ε log law<br />
phase angle = π<br />
4<br />
10 1<br />
10 1<br />
10 2<br />
10 2<br />
y +<br />
phase angle = 3π<br />
4<br />
Figure 5.29: 〈U〉 vs y + snapshots through time (prescribed U) - part 1<br />
y +
FIGURES 140<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
phase angle = π<br />
10 1<br />
10 2<br />
y +<br />
phase angle = 3π<br />
2<br />
10 1<br />
10 2<br />
y +<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
〈U〉<br />
(Uτ ) ss<br />
〈U〉<br />
(Uτ ) ss<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
30<br />
20<br />
10<br />
10 0<br />
0<br />
Subgrid k-ω<br />
k-ε log law<br />
phase angle = 5π<br />
4<br />
10 1<br />
10 1<br />
10 2<br />
10 2<br />
y +<br />
phase angle = 7π<br />
4<br />
Figure 5.30: 〈U〉 vs y + snapshots through time (prescribed U) - part 2<br />
y +
FIGURES 141<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
5<br />
10 0<br />
0<br />
5<br />
10 0<br />
0<br />
phase angle = 0<br />
10 1<br />
10 2<br />
y +<br />
phase angle = π<br />
2<br />
10 1<br />
10 2<br />
y +<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
5<br />
10 0<br />
0<br />
10 0<br />
0<br />
Subgrid k-ω<br />
k-ε log law<br />
5<br />
phase angle = π<br />
4<br />
10 1<br />
10 1<br />
10 2<br />
10 2<br />
y +<br />
phase angle = 3π<br />
4<br />
Figure 5.31: k vs y + snapshots through time (prescribed U) - part 1<br />
y +
FIGURES 142<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
5<br />
10 0<br />
0<br />
5<br />
10 0<br />
0<br />
phase angle = π<br />
10 1<br />
10 2<br />
y +<br />
phase angle = 3π<br />
2<br />
10 1<br />
10 2<br />
y +<br />
Low-Re k-ε<br />
Subgrid k-ε<br />
✄✂ ✁ DNS [29]<br />
k<br />
(U 2 τ ) ss<br />
k<br />
(U 2 τ ) ss<br />
5<br />
10 0<br />
0<br />
10 0<br />
0<br />
Subgrid k-ω<br />
k-ε log law<br />
5<br />
phase angle = 5π<br />
4<br />
10 1<br />
10 1<br />
10 2<br />
10 2<br />
y +<br />
phase angle = 7π<br />
4<br />
Figure 5.32: k vs y + snapshots through time (prescribed U) - part 2<br />
y +