Performance analysis of opto-mechatronic image stabilization for a ...
Performance analysis of opto-mechatronic image stabilization for a ...
Performance analysis of opto-mechatronic image stabilization for a ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
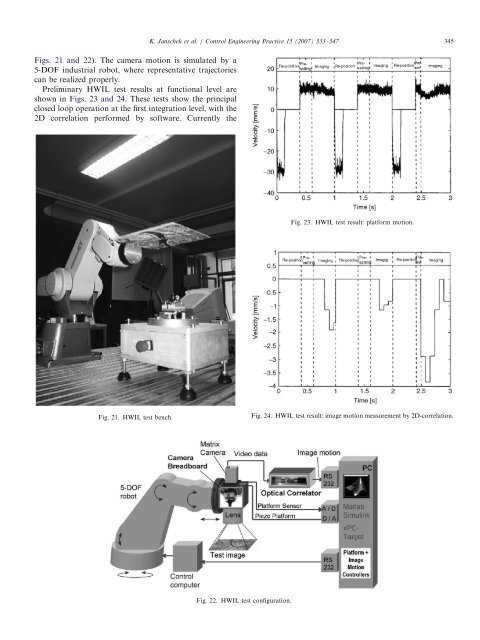
Figs. 21 and 22). The camera motion is simulated by a<br />
5-DOF industrial robot, where representative trajectories<br />
can be realized properly.<br />
Preliminary HWIL test results at functional level are<br />
shown in Figs. 23 and 24. These tests show the principal<br />
closed loop operation at the first integration level, with the<br />
2D correlation per<strong>for</strong>med by s<strong>of</strong>tware. Currently the<br />
Fig. 21. HWIL test bench.<br />
ARTICLE IN PRESS<br />
K. Janschek et al. / Control Engineering Practice 15 (2007) 333–347 345<br />
Fig. 22. HWIL test configuration.<br />
Fig. 23. HWIL test result: plat<strong>for</strong>m motion.<br />
Fig. 24. HWIL test result: <strong>image</strong> motion measurement by 2D-correlation.