Computational Aspects of Maass waveforms
Computational Aspects of Maass waveforms
Computational Aspects of Maass waveforms

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
ACTA UNIVERSITATIS UPSALIENSIS<br />
Uppsala Dissertations in Mathematics<br />
39
Fredrik Strömberg<br />
<strong>Computational</strong> <strong>Aspects</strong> <strong>of</strong> <strong>Maass</strong><br />
Waveforms
Dissertation at Uppsala University to be publicly examined in Room 2347, Polacksbacken,<br />
Tuesday, March 15, 2005 at 13:15 for the Degree <strong>of</strong> Doctor <strong>of</strong> Philosophy. The examination<br />
will be conducted in English.<br />
Abstract<br />
Strömberg, F. 2005. <strong>Computational</strong> <strong>Aspects</strong> <strong>of</strong> <strong>Maass</strong> Waveforms. Uppsala Dissertations in<br />
Mathematics 39. x, 176 pp. Uppsala. ISBN 91-506-1794-X<br />
The topic <strong>of</strong> this thesis is computation <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong>, and we consider a number<br />
<strong>of</strong> different cases: Congruence subgroups <strong>of</strong> PSL(2,Z) and Dirichlet characters (chapter 1);<br />
congruence subgroups and general multiplier systems and real weight (chapter 2); and noncongruence<br />
subgroups <strong>of</strong> the Modular group (chapter 3). In each case we first discuss the necessary<br />
theoretical background. We then outline the algorithm and display some <strong>of</strong> the results obtained<br />
by it.<br />
Keywords: <strong>Maass</strong> waveform, Congruence group, Noncongruence group, Multiplier system,<br />
Theta multiplier system, Eta multiplier system, weight, Hecke operators, Involution, Dirichlet<br />
character, Spectral theory, Computation, Whittaker function<br />
Fredrik Strömberg, Department <strong>of</strong> Mathematics, Uppsala University, Lägerhyddsvägen 2 ,Box<br />
480, SE-75106 Uppsala, Sweden<br />
c○ Fredrik Strömberg 2005<br />
ISBN 91-506-1794-X<br />
ISSN 1401-2049<br />
urn:nbn:se:uu:diva-4778 (http://urn.kb.se/resolve?urn=urn:nbn:se:uu:diva-4778)
Contents<br />
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1<br />
1 <strong>Maass</strong> Waveforms on Hecke Congruence subgroups with Dirichlet<br />
characters<br />
(<strong>Computational</strong> <strong>Aspects</strong>) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11<br />
1.1 General Definitions and Notation . . . . . . . . . . . . . . . . . . . . . . . 12<br />
1.1.1 A Brief Introduction to Fuchsian Groups . . . . . . . . . . . . . 12<br />
1.1.2 Hecke Congruence Groups . . . . . . . . . . . . . . . . . . . . . . . 13<br />
1.1.3 Introduction to Dirichlet Characters . . . . . . . . . . . . . . . . 16<br />
1.1.4 A Brief Introduction to <strong>Maass</strong> Waveforms . . . . . . . . . . . . 18<br />
1.2 Some Structural Theory <strong>of</strong> M(Γ0(N), χ,λ) . . . . . . . . . . . . . . . 20<br />
1.2.1 The Conjugation Operator . . . . . . . . . . . . . . . . . . . . . . . . 20<br />
1.2.2 The Fourier Series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20<br />
1.2.3 Involutions and Normalizers . . . . . . . . . . . . . . . . . . . . . . 21<br />
1.2.4 The Reflection Operator . . . . . . . . . . . . . . . . . . . . . . . . . 22<br />
1.2.5 Complete Symmetrization . . . . . . . . . . . . . . . . . . . . . . . 23<br />
1.2.6 Hecke Operators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25<br />
1.2.7 Oldforms and Newforms . . . . . . . . . . . . . . . . . . . . . . . . . 28<br />
1.2.8 The Cusp Normalizing Maps as Normalizers <strong>of</strong> (Γ0(N), χ) 32<br />
1.3 <strong>Computational</strong> <strong>Aspects</strong> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34<br />
1.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34<br />
1.3.2 Phase 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34<br />
1.3.3 Phase 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43<br />
1.3.4 Remarks on the Performance <strong>of</strong> the Algorithm . . . . . . . . . 44<br />
1.4 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46<br />
1.4.1 Eigenvalues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47<br />
1.4.2 Lowest Eigenvalues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47<br />
1.4.3 Fourier Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48<br />
2 Computation <strong>of</strong> <strong>Maass</strong> Waveforms with Non-trivial Multiplier Systems<br />
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55<br />
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55<br />
2.2 Multiplier Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55<br />
2.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55<br />
2.2.2 The η multiplier system . . . . . . . . . . . . . . . . . . . . . . . . . . 57<br />
2.2.3 The θ Multiplier System . . . . . . . . . . . . . . . . . . . . . . . . . 59<br />
vii
2.2.4 Further properties <strong>of</strong> the multiplier systems . . . . . . . . . . . 61<br />
2.3 <strong>Maass</strong> Waveforms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62<br />
2.3.1 Decomposition <strong>of</strong> the discrete spectrum . . . . . . . . . . . . . . 64<br />
2.4 Operators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65<br />
2.4.1 Conjugation and reflection . . . . . . . . . . . . . . . . . . . . . . . . 65<br />
2.4.2 The involution ωN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68<br />
2.4.3 The operator σ4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70<br />
2.4.4 <strong>Maass</strong> operators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71<br />
2.4.5 <strong>Maass</strong> operators and the symmetry about k = 6 . . . . . . . . 72<br />
2.4.6 Hecke operators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73<br />
2.4.7 Lifts at weight 1 and Fourier coefficients . . . . . . . . . . . . . 77<br />
2.5 Oldforms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80<br />
2.5.1 Γ0(N) with N prime and η-multiplier . . . . . . . . . . . . . . . 81<br />
2.6 The Eisenstein series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82<br />
2.6.1 Weight 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82<br />
2.7 Half integer weight . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83<br />
2.7.1 The Shimura correspondence . . . . . . . . . . . . . . . . . . . . . . 83<br />
2.8 Some <strong>Computational</strong> Remarks . . . . . . . . . . . . . . . . . . . . . . . . . 86<br />
2.9 Numerical results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89<br />
2.9.1 Varying weight . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89<br />
2.9.2 Small weights . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90<br />
2.9.3 Lifts at weight 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94<br />
2.9.4 Half integer weight . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94<br />
3 Computation <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong> on Non-congruence Subgroups <strong>of</strong><br />
the Modular Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107<br />
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107<br />
3.2 Subgroups <strong>of</strong> the Modular Group . . . . . . . . . . . . . . . . . . . . . . . 108<br />
3.2.1 Permutations and subgroups <strong>of</strong> PSL(2,Z) . . . . . . . . . . . . 109<br />
3.2.2 Congruence subgroups . . . . . . . . . . . . . . . . . . . . . . . . . . . 118<br />
3.3 Numerical implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . 119<br />
3.4 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121<br />
3.4.1 Subgroups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121<br />
3.4.2 Newforms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123<br />
3.4.3 Fourier coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123<br />
4 An Algorithm for Whittaker’s W-function . . . . . . . . . . . . . . . . . . . 141<br />
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141<br />
4.2 Presentation <strong>of</strong> the Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . 141<br />
4.3 The path . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142<br />
4.4 The integrand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147<br />
4.5 Evaluation <strong>of</strong> the Integrand . . . . . . . . . . . . . . . . . . . . . . . . . . . 150<br />
4.5.1 The power series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151<br />
4.5.2 Recursion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153<br />
viii
4.5.3 Asymptotic series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155<br />
4.5.4 Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155<br />
4.6 Evaluation <strong>of</strong> the Integrals . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155<br />
4.7 Remarks on the K-Bessel function . . . . . . . . . . . . . . . . . . . . . . 156<br />
4.8 Numerical verification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157<br />
Swedish Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159<br />
Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167<br />
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169<br />
ix
Introduction<br />
This is a dissertation in experimental mathematics, and we are thus in a situation<br />
where the “pure” mathematics takes advantage <strong>of</strong> numerical results to<br />
build hypotheses.<br />
A short description <strong>of</strong> what distinguishes experimental mathematics is that<br />
by using theoretical reasoning you construct numerical models (algorithms)<br />
which are then used to generate information. On the basis <strong>of</strong> the numerical<br />
results one then formulates hypotheses and conjectures (for a more detailed<br />
description see [16]).<br />
The prospect is <strong>of</strong> course that later one will be able provide rigorous pro<strong>of</strong>s<br />
<strong>of</strong> these conjectures, but even in those situations that the present-day mathematical<br />
machinery is not up to this, the numerical results can provide valuable<br />
insight and inspire to further studies.<br />
The three chapters <strong>of</strong> the dissertation are all designed in the same way; the<br />
bulk is devoted to a presentation <strong>of</strong> the theory, which is then used to construct<br />
the algorithms. After a brief description <strong>of</strong> how the algorithms are designed,<br />
we present our experimental findings.<br />
The problem we have studied is the construction <strong>of</strong> the mathematical objects<br />
referred to as “<strong>Maass</strong> <strong>waveforms</strong>” (after Hans <strong>Maass</strong> (1911-1992)). Mathematical<br />
applications <strong>of</strong> these wavefunctions are mainly in analytical number<br />
theory. There are also connections to physics, foremost to mathematical models<br />
<strong>of</strong> quantum chaos ([35, 14]), but also to cosmology ([8]).<br />
On the Physical Background<br />
Consider the motion <strong>of</strong> a free (quantum mechanical) particle with mass m0<br />
on a surface S . According to quantum mechanics, this system is described<br />
by a wave function, ψ, which tells us about the probability <strong>of</strong> encountering<br />
the particle in a certain region <strong>of</strong> the surface. The propagation <strong>of</strong> this wave<br />
function, for a particle with the energy E = ¯hv, is governed by the Schrödinger<br />
equation:<br />
i¯h ∂ψ<br />
∂t<br />
¯h2<br />
= − ∆ψ = Eψ,<br />
2m0<br />
1
where ∆ is the so-called Laplace-Beltrami operator on the surface. (e.g. in the<br />
plane: ∆ψ = ψ ′′<br />
xx + ψ ′′<br />
yy). We now assume that we can separate ψ as a product<br />
<strong>of</strong> a time-dependent part, e−ivt , and a time-independent part, φ(P), P ∈ S . We<br />
thus obtain an equation for the time independent part (the time-independent<br />
Schrödinger equation, or the Laplace equation):<br />
∆φ + λφ = 0, (⋆)<br />
where we have set λ = 2m0E<br />
¯h 2 (the eigenvalue), and since the probability is one<br />
that the particle is somewhere on the surface we must have<br />
<br />
|φ| 2 dP = 1.<br />
S<br />
If we have a charged particle and introduce a constant magnetic field, B, the<br />
time independent part <strong>of</strong> the wave function will obtain a “twist” (spin) and φ<br />
will now satisfy a modified Laplace equation:<br />
∆Bφ + λφ = 0, (⋆⋆)<br />
where ∆B is a modified Laplace-Beltrami operator, (in our case, it will read<br />
∆B = ∆ − iyB ∂<br />
∂x , with B proportional to the magnetic field strength).<br />
Observe that the wave equation (⋆) is “universal”, in the sense that it describes<br />
many different kinds <strong>of</strong> wave motion. For example, if S describes a<br />
drum, then (⋆) will describe the appearance <strong>of</strong> a standing wave on the drum<br />
skin, with a frequency proportional to √ λ. Bass notes, thus correspond to<br />
small λ and higher notes to larger λ.<br />
In this thesis we consider the equations (⋆) and (⋆⋆) for certain special surfaces,<br />
S , namely those with constant negative curvature (we say that the surface<br />
is hyperbolic), finite area and a finite (positive) number <strong>of</strong> “punctures”<br />
or “cusps” (i.e. we have removed a finite number <strong>of</strong> points from the surface<br />
and pulled them away towards infinity). Furthermore, the surfaces have to<br />
be special in an arithmetical way, which in this case means that they correspond<br />
to subgroups <strong>of</strong> the modular group. We also allow our surfaces to have<br />
“corners” (marked points). The solutions to (⋆) and (⋆⋆) on such surfaces are<br />
called <strong>Maass</strong> <strong>waveforms</strong>.<br />
One reason that surfaces <strong>of</strong> negative curvature are <strong>of</strong> interest in this context<br />
is that the classical free-particle motion on these surfaces is known to be<br />
(strongly) chaotic.<br />
By studying the solutions <strong>of</strong> (⋆) on such a surface we might thus gain some<br />
insight about “traces” <strong>of</strong> this classical chaos left behind in the quantized system.<br />
This type <strong>of</strong> investigations is part <strong>of</strong> the research area quantum chaos.<br />
The wavefunctions are not chaotic in themselves, and the classical chaos is<br />
instead visible in e.g. the distribution <strong>of</strong> the energy levels (eigenvalues) and<br />
2
in the appearance <strong>of</strong> the wavefunctions φ which corresponds to high energies.<br />
In Figure 2 you can see a sample <strong>of</strong> how a <strong>Maass</strong> waveform, ϕ with an<br />
eigenvalue λ ≈ 10000 looks. (a) Shows the nodal lines (i.e. the points where<br />
ϕ(z) = 0), and in (b) you can see the probability function associated to ϕ,<br />
i.e. |ϕ(z)| 2 . The light regions in (b) shows the places in the plane where the<br />
quantum mechanical particle likes to hang around.<br />
The main purpose with the work underlying this thesis was to obtain stable<br />
algorithms to compute eigenvalues, λ, and corresponding wave functions, φ,<br />
to the above mentioned problems.<br />
A brief Introduction to Hyperbolic Geometry<br />
To visualize negative curvature (hyperbolic geometry), as a mathematician<br />
one usually works in the upper half-plane model, i.e.<br />
H = {x + iy ∈ C|y > 0},<br />
where we introduce a concept <strong>of</strong> distance and area with the help <strong>of</strong> the arc<br />
element<br />
ds = |dz|<br />
y ,<br />
and the area element<br />
dµ = dxdy<br />
.<br />
y2 The shortest path between two points z1,z2 ∈ H is obtained by following<br />
the geodesic which passes through these points. In the usual (flat) case the<br />
geodesic is the unique straight line which passes through these points. In the<br />
hyperbolic upper half plane, the geodesics are the semi-circles and straight<br />
lines which are perpendicular to the x-axis. See Figure 1 for an illustration <strong>of</strong><br />
Figure 1: The upper half-plane<br />
H<br />
γ3<br />
y<br />
z4<br />
z3<br />
γ1<br />
γ2<br />
z2<br />
z1<br />
(a) Geodesics and a horocycle<br />
x<br />
S<br />
F1 F4 F7<br />
E<br />
e2<br />
e3 e ′ 3<br />
F6<br />
F3<br />
F5<br />
F2<br />
(b) A fundamental domain<br />
3
the geodesics γ1 and γ2 which connect z1 with z2 and z3 with z4 respectively.<br />
In the figure we also give an example <strong>of</strong> a horocycle, γ3.<br />
A consequence <strong>of</strong> this (odd) way to measure distances in the upper halfplane<br />
is for example that you can never get all the way down to the real line,<br />
y = 0 (i.e. the distance from any point in H to the real line is infinite).<br />
A more physical way to think about the hyperbolic space is the following<br />
(after Poincaré [82]):<br />
"Visualize yourself in a finite spherical universe, bounded by a “shell”. Assume<br />
that the temperature in this universe is proportional to the distance from<br />
the shell. That is, it is hottest in the center, and the absolute zero temperature is<br />
attained at the shell. Now, we also make the assumption that the speed <strong>of</strong> movement<br />
is proportional to the temperature (this is what one expect physically, at<br />
the molecular/atomic level).<br />
If we now decide to move to the end <strong>of</strong> the universe (i.e. the shell) it is easy<br />
to realize that we will never get there (in finite time). What we will experience<br />
is that the closer we get to the shell, the lower the temperature gets and the<br />
slower we move.<br />
Mathematically, under these assumptions, we can can compute our distance<br />
from the center at the time t, r(t) = R(1 − e −ct ), where R is the radius <strong>of</strong> the<br />
shell and c is a positive constant."<br />
An isometry in a space (where we have a concept <strong>of</strong> distances) is a mapping<br />
which preserves distances and areas. In the usual “flat” case, the translations,<br />
rotations and reflections are examples <strong>of</strong> isometries. Reflection is an example<br />
<strong>of</strong> an orientation-reversing isometry, while translations and rotations are examples<br />
<strong>of</strong> orientation-preserving isometries. In the upper half-plane we know<br />
that any orientation preserving isometry can be written as a Möbius transfor-<br />
mation:<br />
T : z ↦→<br />
az + b<br />
, where a,b,c,d ∈ R, ad − bc = 1.<br />
cz + d<br />
Such a transformation is then associated to a pair <strong>of</strong> matrices:<br />
<br />
±<br />
a<br />
c<br />
b<br />
d<br />
,<br />
and the group <strong>of</strong> all such isometries are usually denoted by PSL(2,R) =the<br />
group <strong>of</strong> all matrices <br />
a b<br />
c d , with a,b,c,d ∈ R, ad − bc = 1, and where we<br />
identify the matrices <br />
a b −a −b<br />
c d and −c −d .<br />
One knows that all hyperbolic surfaces can be described with the help <strong>of</strong><br />
discrete subgroups <strong>of</strong> PSL(2,R), i.e. we can write our surface S as S =<br />
Γ\H , where Γ is a Fuchsian group (a discrete group <strong>of</strong> Möbius transformations).<br />
Those surfaces, S , we are interested in have “horns” (points at ∞) and<br />
4
they can also have corners. In the corresponding group, Γ, the horns show<br />
themselves as fixed-points to parabolic transformations, i.e. those that correspond<br />
to matrices with the absolute value <strong>of</strong> the trace = 2 (remember that the<br />
trace <strong>of</strong> a matrix <br />
a b<br />
c d is defined as a + d). The corners, on the other hand are<br />
fixed-points <strong>of</strong> elliptic (|trace|< 2). Therefore, one usually says that the corresponding<br />
points are parabolic or elliptic. (The parabolic fixed-points are also<br />
called cusps). In PSL(2,R), in addition to elliptic and parabolic transformations<br />
(which geometrically correspond to rotations and translations) also hyperbolic<br />
transformations (|trace|> 2). While the first types have unique fixedpoints,<br />
in general the hyperbolic maps have two fixed points in R ∪ {∞} (and<br />
geometrically, they describe a movement along the geodesic which connects<br />
these points).<br />
To illustrate the surface S = Γ\H it is customary to use a fundamental<br />
domain, which in our case can be taken as a connected domain F ⊂ H with<br />
the following two properties: we can not map any point inside F to another<br />
point inside F with a map in Γ, and secondly, the Γ-images F must tessellate<br />
H (i.e. ∪γ∈Γγ(F ) = H). An example <strong>of</strong> a fundamental domain is the<br />
standard fundamental domain for the modular group, PSL(2,Z) (all matrices<br />
in PSL(2,Z) with integer entries), F1 = {z = x + iy ∈ H||z| ≥ 1, |x| ≤ 1<br />
2 }.<br />
In Figure 1(b) we can see F1 together with 6 “copies”. Observe that all images,<br />
F j, have the same hyperbolic area. If we identify the sides <strong>of</strong> F1 using<br />
the maps S : z ↦→ z + 1 and E : z ↦→ −1 we get (topologically) a sphere with<br />
z<br />
one cusp (i∞) and two corners (e2 and e3 which is identified with e ′ 3<br />
). One can<br />
show that the side pairing transformations E and S generates PSL(2,Z) and,<br />
in fact, in all cases we consider here, we can always choose the fundamental<br />
domain in such a way that the side pairing maps generate the group.<br />
Summary <strong>of</strong> the Chapters in the Thesis<br />
In chapter one we study the problem which in the upper half-plane model can<br />
be written as:<br />
y 2 φ ′′<br />
xx(z) + φ ′′<br />
yy(z) + λφ(z) = 0, z = x + iy ∈ H , (1)<br />
φ (T z) = χ(T )φ(z),<br />
<br />
T ∈ Γ, z ∈ H , (2)<br />
|φ| 2 dµ = 1, (3)<br />
Γ\H<br />
where χ : Γ → S 1 as an even Dirichlet character (i.e. χ(AB) = χ(A)χ(B) and<br />
χ(−1) = 1), and Γ is a Hecke-congruence subgroup <strong>of</strong> the modular group. For<br />
a given positive integer N, we define the Hecke-congruence group, Γ0(N), in<br />
5
the following way:<br />
<br />
<br />
Γ0(N) =<br />
a<br />
c<br />
b<br />
d<br />
|a,b,c,d ∈ Z, ad − bc = 1, c ≡ 0 mod N .<br />
We will now briefly outline the algorithm which we use to find solutions <strong>of</strong> this<br />
problem. Given an eigenvalue, λ = 1<br />
4 + R2 , we know that the corresponding<br />
φ can be written as a Fourier series:<br />
φ(x + iy) = ∑ c(n)<br />
n=0<br />
√ yKiR(2π|n|y)e 2πinx ,<br />
where KiR(y) is the K-Bessel function. Due to the rapid decay <strong>of</strong> KiR(y) we<br />
can approximate φ (up to any given ε > 0) with a truncated Fourier series,<br />
φ(x + iy) ≈ ˆφ(x + iy) = ∑<br />
0 0 is chosen wisely), thus providing us with a set <strong>of</strong> linear equations for<br />
the coefficients c(n):<br />
c(n) √ Y KiR(2π|n|Y ) = 1<br />
2Q<br />
Q<br />
∑<br />
m=1−Q<br />
ˆφ(zm)e(−nxm) ≈ 1<br />
2Q<br />
Q<br />
∑<br />
m=1−Q<br />
φ(zm)e(−nxm),<br />
and by using the implicit automorphy (2) we can replace the point zm with a<br />
point, z ∗ m = x ∗ m + iy ∗ m in the fundamental domain <strong>of</strong> the group. Doing this, we<br />
get a non-trivial, well-conditioned, linear system <strong>of</strong> equations<br />
c(n) √ Y KiR(2π|n|Y ) = ∑ Vnkc(k),<br />
|k|≤M0<br />
(4)<br />
which we can solve to obtain the Fourier coefficients c(n).<br />
If we do this for an arbitrary value <strong>of</strong> R, the resulting function φ will obviously<br />
not be invariant under Γ. But if 1<br />
4 + R2 is close to a true eigenvalue<br />
the computed Fourier coefficients will be close to the coefficients <strong>of</strong> a true<br />
eigenfunction. In particular, for a “true” R, the solution vectors should be independent<br />
<strong>of</strong> the value <strong>of</strong> Y (provided it is kept small enough that the system<br />
does not become trivial).<br />
We use this fact to locate eigenvalues as follows; using two different values<br />
<strong>of</strong> Y in parallel, we solve (4) over and over again, for R running through a<br />
specified interval, all the while we try to minimize the functional<br />
6<br />
h(R) = c(2) − c ′ (2) + c(3) − c ′ (3) + c(4) − c ′ (4) ,
where c(n) and c ′ (n) are the solutions <strong>of</strong> (4) corresponding to the different<br />
Y ’s. When we find a minimizing R-value, we go through with further (more<br />
technical, e.g. using Hecke-relations) tests to see if we indeed seem to be close<br />
to a true eigenvalue.<br />
As soon as we have an approximate eigenvalue and a corresponding set <strong>of</strong><br />
Fourier coefficients we can use another algorithm (phase 2) to easily compute<br />
many more coefficients.<br />
In chapter 2 we study a similar problem, where we instead <strong>of</strong> (1) consider<br />
the equation<br />
y 2 φ ′′<br />
xx(z) + φ ′′<br />
yy(z) − iymφ ′ x + λφ(z) = 0,z = x + iy ∈ H , (1’)<br />
where the weight, m, is a real number, and where the condition (2) is replaced<br />
by<br />
φ(T z) = v(T ) jT (z;m)φ(z), (2’)<br />
where v : Γ → C is a so-called multiplier system and<br />
jT (z;m) = exp(2πimArg(cz + d)),<br />
for T = <br />
a b<br />
c d and m ∈ R.<br />
Physically, we can interpret the equation (1’) as if we now have a charged<br />
(quantum mechanical) particle moving in a constant magnetic field on the surface<br />
Γ\H. The magnetic field strength is proportional to m, and the multiplier<br />
system can be used to describe the magnetic flux through different parts <strong>of</strong> the<br />
surface (the horns, handles etc.) Cf. [2, 1, 11]. (For those that are knowledgeable<br />
in the physics here, (1’) corresponds to the choice <strong>of</strong> the Landau gauge,<br />
A = c m<br />
y dx for some suitable constant c.)<br />
It turns out that the method introduced in chapter one is still applicable after<br />
a few (minor) changes. The (computationally) hardest problem here is that the<br />
Fourier series now contain the Whittaker W-function instead <strong>of</strong> the K-Bessel<br />
function. The W-function is more difficult to compute, and we were forced<br />
to develop a new algorithm for that purpose. The algorithm is presented in<br />
Chapter 4.<br />
In chapter 3 we investigate the same problem as in chapter 1, but here<br />
we also consider subgroups Γ ⊆ PSL(2,Z) which are not congruence subgroups.<br />
The main difference between congruence subgroups and general noncongruence<br />
subgroups is that one doesn’t have as many “symmetries” available<br />
in the noncongruence case. This implies for example that one doesn’t<br />
have much a priori knowledge <strong>of</strong> neither the spectra nor the eigenfunctions.<br />
And one can therefore pose questions which are more or less answered in the<br />
congruence case: Are there any “new” <strong>Maass</strong> <strong>waveforms</strong>? If so, how many<br />
are there? Do they show any symmetries? How are their Fourier coefficients<br />
7
distributed?<br />
We prove the existence <strong>of</strong> new <strong>Maass</strong> <strong>waveforms</strong> for groups Γ which have<br />
certain specific properties, which on the surfaces Γ\H basically correspond to<br />
different forms <strong>of</strong> mirror symmetries. (To systematically verify these properties<br />
for large groups, computer aid is a necessity).<br />
8
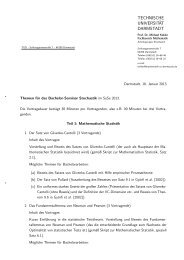
Figure 2: Plots <strong>of</strong> a <strong>Maass</strong> waveform, ϕ(z) on Γ0(5) with R = 100.0870...<br />
2.1<br />
Nodal lines for R=100.0870... on Γ 0 (5)<br />
0.1<br />
−1 1<br />
(a) Nodal lines<br />
(b) Density plot, i.e. |ϕ(z)| 2<br />
9
1 <strong>Maass</strong> Waveforms on Hecke Congruence<br />
subgroups with Dirichlet characters<br />
(<strong>Computational</strong> <strong>Aspects</strong>)<br />
Introduction<br />
The main topic <strong>of</strong> this chapter is computational aspects <strong>of</strong> the theory <strong>of</strong> <strong>Maass</strong><br />
<strong>waveforms</strong>, i.e. square-integrable eigenfunctions <strong>of</strong> the Laplace- Beltrami operator,<br />
on certain Riemann surfaces with constant negative curvature and finite<br />
area. The surfaces under consideration correspond to quotients <strong>of</strong> the upper<br />
half-plane by certain discrete groups <strong>of</strong> isometries, the so called Hecke congruence<br />
subgroups.<br />
It is known that such functions can also be regarded as wavefunctions corresponding<br />
to a quantum-mechanical system describing a particle moving freely<br />
on the surface. Since the classical counterpart <strong>of</strong> this motion is chaotic, the<br />
study <strong>of</strong> these wavefunctions is closely related to the study <strong>of</strong> quantum chaos<br />
on the surface. The presentation here, however, will be purely from a mathematical<br />
viewpoint.<br />
Today, our best knowledge <strong>of</strong> generic <strong>Maass</strong> <strong>waveforms</strong> comes from numerical<br />
experiments, and these have previously been limited to the modular<br />
group, PSL(2,Z), and certain triangle groups (cf. [43, 45, 42] and [98]). One<br />
<strong>of</strong> the primary goals <strong>of</strong> this lecture is to give the necessary theoretical background<br />
to generalize these numerical experiments to Hecke congruence subgroups<br />
and non-trivial characters. We will describe algorithms that can be<br />
used to locate eigenvalues and eigenfunctions, and we will also present some<br />
<strong>of</strong> the results obtained by those algorithms.<br />
There are four sections, first elementary notations and definitions, mostly<br />
from the study <strong>of</strong> Fuchsian groups and hyperbolic geometry. Then more <strong>of</strong> the<br />
theoretical background needed to understand the rich structure <strong>of</strong> the space <strong>of</strong><br />
<strong>Maass</strong> <strong>waveforms</strong> will be introduced. The third section deals with the computational<br />
aspects, and the final section contains some numerical results.<br />
11
1.1 General Definitions and Notation<br />
1.1.1 A Brief Introduction to Fuchsian Groups<br />
For a more thorough (but still elementary) introduction to this subject see for<br />
example [52] or [31].<br />
The following notation will be used; M2(K) is the ring <strong>of</strong> 2 × 2 matrices<br />
over some base ring K, usually R or Z, GL(2,K) ⊆ M2(K) is the group <strong>of</strong><br />
invertible 2 × 2 matrices and SL(2,K) ⊆ M2(K) is the group <strong>of</strong> matrices with<br />
determinant equal to 1. H denotes the Poincaré upper half-plane {z = x +<br />
iy|y > 0} equipped with the hyperbolic metric and area measure<br />
ds 2 = 1<br />
y (dx2 + dy 2 ), dµ = 1<br />
y<br />
2 dxdy.<br />
PSL(2,R) is the group <strong>of</strong> Möbius transformations with real coefficients,<br />
<br />
<br />
az + b <br />
PSL(2,R) = z → <br />
cz + d a,b,c,d ∈ R, ad − bc = 1 .<br />
It is clear that we can represent such mappings with matrices and there is an<br />
isomorphism PSL(2,R) ≈ SL(2,R)/{±Id}, where Id is the identity element<br />
in SL(2,R). We will use matrix and transformation notation interchangeably,<br />
all groups discussed are subgroups <strong>of</strong> PSL(2,R) so they always contain −Id,<br />
hence there should be no confusion when we use the same notation for matrix<br />
groups as for transformation groups. Note that H, the hyperbolic metric and<br />
the hyperbolic measure are invariant under PSL(2,R). The only subgroups <strong>of</strong><br />
PSL(2,R) that we are interested in are the discrete subgroups.<br />
Definition 1.1.1. A Fuchsian group is a discrete subgroup <strong>of</strong> PSL(2,R).<br />
The basic example <strong>of</strong> a Fuchsian group, for us, is the modular group,<br />
PSL(2,Z) = SL(2,Z)/{±Id} ⊆ PSL(2,R).<br />
This is just the subgroup <strong>of</strong> Möbius transformations in PSL(2,R) with integer<br />
coefficients. This is also an example <strong>of</strong> what is called an arithmetic group<br />
(cf. [52, ch. 5]) and is <strong>of</strong> interest for number theorists among others.<br />
If Γ is a Fuchsian group it is a standard result that the space <strong>of</strong> Γ−orbits,<br />
Γ\H = {Γz|z ∈ H}, can be given the analytical structure <strong>of</strong> a Riemann surface<br />
with marked points (this is also called an orbifold) (cf. [65, II.F.], and for<br />
more details [85]). On the other hand, a classical result, the Klein-Poincaré<br />
uniformization theorem, asserts that any Riemann surface M with constant<br />
negative curvature equal to −1 can be realized as Γ\H for some Fuchsian<br />
group Γ (see [60] for more details on uniformization). We can visualize the<br />
Riemann surface Γ\H via a fundamental domain F for Γ.<br />
12
Definition 1.1.2. A closed set F ⊆ H is a fundamental domain for Γ if<br />
a) ∪T ∈ΓT (F) = H, and<br />
b) if F ◦ denotes the interior <strong>of</strong> F then T1(F ◦ ) ∩ T2(F ◦ ) = /0 if T1 =<br />
T2 ∈ Γ.<br />
Note that we use closed fundamental domains in line with for example [52],<br />
so they will in general contain some equivalent boundary points. There are<br />
two important examples <strong>of</strong> fundamental domains.<br />
Definition 1.1.3. Let Γ be a Fuchsian group and let p ∈ H be a point that<br />
is not fixed by any element in Γ. Let d(z,w) denote the hyperbolic distance<br />
between z and w and define<br />
DΓ(p) = {z ∈ H|d(z, p) ≤ d(z,T p), ∀T ∈ Γ}.<br />
The set DΓ(p) is called a Dirichlet fundamental domain for Γ, with center p.<br />
Let Γz = {T ∈ Γ|T z = z} denote the stabilizer in Γ <strong>of</strong> the point z ∈ H ∪R∪<br />
{∞}. Another important type <strong>of</strong> fundamental domain, FΓ, the Ford fundamental<br />
domain, can be described in terms <strong>of</strong> the exterior <strong>of</strong> isometric circles. Let<br />
DT = z ∈ H |T ′ (z)| ≥ 1 ,∀T ∈ PSL(2,R). Then, if Γ∞ = {T ∈ Γ|T ∞ = ∞}<br />
is non-empty and generated by S : z ↦→ z + 1, we define<br />
FΓ = <br />
T ∈Γ\Γ∞<br />
DT ∩<br />
<br />
z ∈ H |ℜz| ≤ 1<br />
<br />
.<br />
2<br />
The boundary (in H ∪ R ∪ {∞}) <strong>of</strong> a fundamental domain F might contain<br />
vertices that are fixed-points <strong>of</strong> elements <strong>of</strong> Γ; these points are called elliptic<br />
or parabolic vertices respectively if the transformations fixing them are either<br />
elliptic or parabolic. A parabolic vertex is usually referred to as a cusp, and is<br />
viewed as either a point removed from the surface Γ\H, or a point at infinity.<br />
1.1.2 Hecke Congruence Groups<br />
Let N be any positive integer. We define the principal congruence subgroup<br />
<strong>of</strong> level N, Γ(N) ⊆ PSL(2,Z), by<br />
<br />
<br />
a b<br />
<br />
Γ(N) =<br />
∈ PSL(2,Z) <br />
a b 1 0<br />
c d<br />
≡<br />
mod N .<br />
c d 0 1<br />
This is a subgroup <strong>of</strong> finite index in PSL(2,Z), and any subgroup <strong>of</strong> PSL(2,Z)<br />
containing some Γ(N) is called a congruence subgroup. The Hecke congru-<br />
13
ence subgroup, Γ0(N), is defined by<br />
<br />
<br />
<br />
a b<br />
<br />
Γ0(N) =<br />
∈ PSL(2,Z) <br />
c d<br />
c ≡ 0 mod N .<br />
It is obvious that Γ(N) ⊆ Γ0(N) so Γ0(N) is a congruence subgroup.<br />
The standard fundamental domain for PSL(2,Z) = Γ0(1) is the set<br />
<br />
F1 = z ∈ H <br />
<br />
1<br />
|z| ≥ 1, |ℜz| ≤ ,<br />
2<br />
which is also a Ford fundamental domain. Suppose from now on that we have<br />
fixed a set <strong>of</strong> right coset representatives {Vk} vN<br />
k=1 for Γ0(N) in Γ0(1). (See<br />
pp. 43–43 on how to construct such maps Vk.) One knows that<br />
−1<br />
vN = [Γ0(1) : Γ0(N)] = N∏ 1 + p<br />
p|N<br />
.<br />
We can now fix a fundamental domain for Γ0(N) corresponding to these coset<br />
representatives (cf. [52, thm. 3.1.2])<br />
FN = ∪ vN<br />
k=1 Vk(F1). (1.1)<br />
Note that FN need not be normal in the sense <strong>of</strong> [39], but it will be bounded<br />
by finitely many geodesics and it also has some other nice properties as we<br />
will see (Theorem 1.1). Denote by κ0 the total number <strong>of</strong> parabolic vertices<br />
<strong>of</strong> FN, and by κ the number <strong>of</strong> inequivalent cusps <strong>of</strong> FN (note κ ≤ κ0). It is<br />
known that<br />
<br />
κ = ∑ φ d,<br />
d|N,d>0<br />
N<br />
<br />
,<br />
d<br />
where φ is Eulers totient function,<br />
φ(n) = # j ∈ {1,2,3,...,n} ( j,n) = 1 <br />
(see [51, 89]). Let v1,...,vκ0 be the set <strong>of</strong> parabolic vertices <strong>of</strong> FN and<br />
p1,..., pκ a set <strong>of</strong> inequivalent cusps. Without loss <strong>of</strong> generality we set p1 =<br />
∞.<br />
Definition 1.1.4. A cusp normalizing map associated to a cusp p j, is a map<br />
σ j ∈ PSL(2,R) satisfying<br />
i) σ j(∞) = p j, and<br />
ii) σ jSσ −1<br />
j = S j,<br />
where Sz = z + 1 is a generator <strong>of</strong> Γ∞, and S j is a generator <strong>of</strong> Γp j , the (cyclic<br />
14
infinite) stabilizer group <strong>of</strong> the cusp p j. Then σ j is uniquely determined up to<br />
a translation.<br />
For the groups Γ0(N) we will always choose the cusp normalizing maps σ j<br />
<strong>of</strong> the form σ j = A jρ j, where A j ∈ SL(2,Z) maps ∞ to p j and ρ j is a scaling<br />
by h j, the so-called width <strong>of</strong> the cusp p j (cf. [51, pp. 36-37]). It is important<br />
to note that h j|N. For the cusp p1 = ∞ we will always take σ1 as the identity.<br />
We will now provide an important fact about the fundamental domain for<br />
Γ0(N) that will be <strong>of</strong> use to us later. First, for each parabolic vertex vℓ <strong>of</strong><br />
FN we choose a map Uℓ ∈ Γ0(N) which maps vℓ to its cusp representative in<br />
{p1,..., pκ}; say Uℓ(νℓ) = p j(ℓ). If vℓ is already a cusp representative we take<br />
Uℓ = Id. This will give us a finite collection <strong>of</strong> maps U = {Uℓ}1≤ℓ≤κ0 . Now,<br />
to any point w ∈ FN we associate the “closest” (see Remark 1.1.1) parabolic<br />
vertex, vw, and a corresponding map Uw = Uℓ(vw) ∈ U .<br />
Remark 1.1.1. By the “closest” vertex to a point w ∈ FN we mean the vertex<br />
vℓ with respect to which the point w has the greatest height, i.e. that vℓ for<br />
which ℑ(σ −1<br />
j(ℓ) Uℓw) is maximal. We use I(w) to denote the index <strong>of</strong> the cusp<br />
representative corresponding to the vertex closest to w.<br />
Define the height <strong>of</strong> w ∈ FN, h(w), by<br />
h(w) = ℑ<br />
<br />
σ −1<br />
I(w) Uw (w)<br />
and the minimal height <strong>of</strong> the fundamental domain FN, Y0, by<br />
<br />
Y0 = Y0(N) = inf h(w) = inf ℑ σ<br />
w∈FN w∈FN<br />
−1<br />
I(w) Uw<br />
<br />
(w) . (1.2)<br />
It is clear that Y0 depends only on the fundamental domain FN (i.e. the choice<br />
<strong>of</strong> the coset representatives {Vk}) and not on the choice <strong>of</strong> the cusp representatives<br />
{p j}. A standard compactness argument also implies that Y0 is strictly<br />
positive and larger than some fixed quantity only depending on the fundamental<br />
domain, and the following theorem actually gives us an explicit bound.<br />
Theorem 1.1. For any positive integer N, the minimal height <strong>of</strong> FN satisfies<br />
the following inequality<br />
√<br />
3<br />
Y0(N) ≥<br />
2N .<br />
Pro<strong>of</strong>. Let {Vk} be the fixed set <strong>of</strong> coset representatives <strong>of</strong> Γ0(N) in Γ0(1) and<br />
FN as above.<br />
<br />
Let w ∈ FN. We want to show that ℑ<br />
σ −1<br />
to Remark 1.1.1 it is enough to show that ℑ<br />
<br />
,<br />
<br />
I(w) Uww<br />
√<br />
3<br />
≥ 2N<br />
<br />
σ −1<br />
j(ℓ) Uℓw<br />
<br />
≥<br />
, and according<br />
√ 3<br />
2N<br />
for some ℓ.<br />
Since w ∈ FN = ∪Vk(F1) there is an index k such that w ∈ Vk(F1) = Rk. Let<br />
15
v ℓ(k) = Vk(∞) be the vertex at infinity <strong>of</strong> Rk, and p j(k) the cusp representative<br />
equivalent to v ℓ(k), i.e. U ℓ(k)v ℓ(k) = p j(k).<br />
Note that we can write σ −1<br />
j = l js jω j where l j is a translation, ω j ∈ PSL(2,Z)<br />
is such that ω jS jω −1<br />
j = Sh j , (where S h z = z + h) and s j is a scaling with 1<br />
h j ,<br />
where the positive integer h j is called the width <strong>of</strong> the cusp p j (cf. [51, p.<br />
36-37]). The width, h j is independent <strong>of</strong> the choice <strong>of</strong> cusp-representative in<br />
the class <strong>of</strong> p j (cf. [63, p. 59]). Now ω j(k)U ℓ(k)Vk(F1) is simply a horizontal<br />
translate <strong>of</strong> F1, so ℑ(ω j(k)U ℓ(k)w) ≥<br />
√ 3<br />
2<br />
and thus ℑ(σ −1<br />
j(k) U ℓ(k)w) ≥<br />
[51, p. 36-37] it is clear that 1 ≤ h j ≤ N for all j, hence ℑ(σ −1<br />
and accordingly Y0 ≥<br />
√ 3<br />
2N .<br />
√<br />
3<br />
2h . From<br />
j(k)<br />
j(k) U √<br />
3<br />
ℓ(k)w) ≥ 2N ,<br />
Remark 1.1.2. If P is a prime ≥ 3 we will see that for a natural choice (which √<br />
3<br />
we use in the numerical work) <strong>of</strong> fundamental domain we have Y0(P) = 2P .<br />
Let T z = −1<br />
z and Sz = z + 1. We know that the maps V1 = Id and Vk =<br />
P+3<br />
T S (k− 2 ) for k = 2,...P + 1 is a set <strong>of</strong> right coset representatives for Γ0(P)<br />
in Γ0(1) (cf. [83, p. 135]). The corresponding fundamental domain is FP =<br />
∪ P+1<br />
k=1Vk(F1), it has one cusp <strong>of</strong> width 1 at p1 = ∞ and one cusp <strong>of</strong> width P at<br />
p2 = 0. The cusp normalizing maps are σ1 = Id and σ2z = −1<br />
1<br />
Pz . Let e = 2 +i<br />
√<br />
3<br />
2 .<br />
√ <br />
3 <br />
Then we see that ℑ(VP+1(e)) = 2 1<br />
√ <br />
3 P−1<br />
2 + i 2 + 2 −2 √<br />
3 4 = 2 P2 +3 ≤<br />
√<br />
3<br />
2P (since<br />
P ≥ 3), and clearly ℑ(σ −1<br />
2 VP+1(e)) = ℑ √<br />
e 1 1 3<br />
P + 2 − 2P = 2P . Hence the height<br />
√<br />
3<br />
<strong>of</strong> VP+1(e) is equal to 2P , which means that Y0<br />
√<br />
3<br />
≤ 2P . The conclusion is that<br />
for a prime level P ≥ 3 and for this particular choice <strong>of</strong> fundamental domain<br />
we have Y0 =<br />
√ 3<br />
2P .<br />
1.1.3 Introduction to Dirichlet Characters<br />
First we fix m ∈ Z + . A Dirichlet character, χ mod m, is a group homomorphism<br />
from (Z/mZ) ∗ to the unit circle S 1 , which is viewed as a function on Z<br />
(with period m) by assigning χ(n) = 0 if (n,m) > 1. We then define the map<br />
χ : SL(2,Z) → S 1 by<br />
χ<br />
<br />
a b<br />
c d<br />
<br />
= χ(d).<br />
Note that χ = 0 on Γ0(m) since ad − bc = 1 and c ≡ 0 mod m imply that<br />
χ(ad) = χ(a)χ(d) = 1. Observe also that χ is a group homomorphism from<br />
Γ0(m) to S 1 .<br />
If χ has a period less than m (for values <strong>of</strong> n restricted by (n,m) = 1) then<br />
χ is said to be imprimitive, otherwise χ is said to be a primitive character.<br />
16
(Note that the trivial character, χ(n) ≡ 1, is imprimitive for m ≥ 2). If q is the<br />
smallest period <strong>of</strong> χ, then q is called the conductor <strong>of</strong> χ.<br />
If χ has period m and conductor q there is a unique way to define a character<br />
χ ′ mod m ′ , for all modulus m ′ which are multiples <strong>of</strong> q or multiples <strong>of</strong> m.<br />
We say that the character χ is even if χ(−1) = χ(1) = 1, and odd if χ(−1) =<br />
−χ(1) = −1.<br />
Since we are actually concerned with PSL(2,Z) we need χ(A) = χ(−A) to<br />
hold for any A ∈ SL(2,Z), hence we will only consider even characters.<br />
It is known (see [27]) that primitive real characters exist only for moduli <strong>of</strong><br />
the following types:<br />
m = N1,4N2, or 4N3,<br />
where N1 ≡ 1 mod 4, N2 ≡ 2 mod 4 and N3 ≡ 3 mod 4 and N1,N2 and N3 are<br />
square-free.<br />
One should note that these are precisely the fundamental discriminants <strong>of</strong><br />
real quadratic fields, and it is also a fact that all real characters are given by<br />
quadratic residue symbols (Kronecker’s extension <strong>of</strong> the Legendre symbol)<br />
cf., e.g. [25, p. 37].<br />
Since characters are multiplicative it is fairly easy to evaluate them at products<br />
<strong>of</strong> integers, but when it comes to linear combinations <strong>of</strong> integers it is<br />
harder. A useful trick for evaluating characters at certain linear combinations<br />
is to factor the character instead <strong>of</strong> the integer. Here we will give the simplest<br />
case, which will be <strong>of</strong> use for the pro<strong>of</strong> <strong>of</strong> Proposition 1.2.6 in Subsection<br />
1.2.8.<br />
Fact 1.1.1. Suppose that χ is a real primitive character mod N and that m ∈<br />
Z + is such that m|N and m, N<br />
<br />
m = 1. Then it is known (cf. [69, (3.1.4)]) that<br />
we can factor χ as χ = χmχ N , where χm and χ N are real primitive characters<br />
m<br />
m<br />
mod m and N<br />
m respectively.<br />
Example 1.1.1. Let χ, N and m be as above, and let t = qA + N<br />
q B for some<br />
A,B ∈ Z. Then<br />
<br />
χ(t) = χm(t)χ N (t) = χm mA +<br />
m<br />
N<br />
m B<br />
<br />
χ N mA +<br />
m<br />
N<br />
m B<br />
<br />
<br />
N<br />
= χm<br />
m B<br />
<br />
χ N (mA).<br />
m<br />
Definition 1.1.5. A character χ defined on Γ0(N) is said to leave the cusp<br />
p j open if it is trivial on the stabilizer subgroup Γp j , i.e. if χ(S j) = 1. If a<br />
character leaves all cusps open we say that the character is regular for Γ0(N).<br />
If a character does not leave the cusp open we say that the cusp is closed,<br />
and it is known that there is no contribution to the continuous part <strong>of</strong> the spectrum<br />
from a closed cusp (cf. [39, pp. 91-99]).<br />
17
Observe that the cusp at ∞ is fixed by S : z ↦→ z + 1 so χ(S) = 1 for any<br />
Dirichlet character. Since we know that S j = σ jSσ −1<br />
j we will also have<br />
χ(S j) = 1 whenever σ j is a (Γ0(N), χ)−normalizer as described in Definition<br />
1.2.1 below. In particular, for square free N ≡ 1 mod 4 all Dirichlet characters<br />
are regular (cf. [12]).<br />
The basic assumption from now on (unless anything else is explicitly stated)<br />
is that any character χ is a real and even Dirichlet character.<br />
1.1.4 A Brief Introduction to <strong>Maass</strong> Waveforms<br />
For a Fuchsian group Γ, a function f defined on the upper half-plane is called<br />
Γ−automorphic if it is invariant or transforms in a chosen manner (i.e. with<br />
respect to characters or general multipliers) under the action <strong>of</strong> Γ by the so-<br />
called slash operator <strong>of</strong> weight k ∈ Z defined by<br />
f |[k,A](z) =<br />
cz + d<br />
|cz + d|<br />
−k<br />
f (Az), A ∈ Γ.<br />
Such functions can be viewed as “living” on the Riemann surface Γ\H (or<br />
coverings <strong>of</strong> it in the case <strong>of</strong> characters). In this chapter we will only consider<br />
certain non-holomorphic L 2 −functions, the so called <strong>Maass</strong> <strong>waveforms</strong> (to be<br />
defined below) and only at weight k = 0 (note that f |[0,A](z) = f (Az)).<br />
In the hyperbolic metric on H the Laplace-Beltrami operator, ∆, takes the<br />
form<br />
∆ = y 2<br />
<br />
∂ 2 ∂ 2<br />
+<br />
∂x2 ∂y2 <br />
.<br />
Definition 1.1.6. If Γ is a Fuchsian group, a <strong>Maass</strong> waveform for Γ is a function<br />
f defined on H with the following properties<br />
i) ∆ f + λ f = 0, λ ≥ 0;<br />
ii) f (Az) = f (z), for all A ∈ Γ;<br />
iii)<br />
<br />
Γ\H | f |2 dµ < ∞.<br />
We usually write the eigenvalue as λ = 1<br />
4 + R2 . It is conjectured (Selberg)<br />
that for congruence subgroups, if λ = 0, then we can take R ∈ [0,∞) (λ ≥<br />
1<br />
1<br />
4 ); any eigenvalues λ ∈ (0, 4 ] are usually called exceptional. We denote the<br />
space <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong> for Γ by M(Γ), and the space corresponding to a<br />
particular eigenvalue by M(Γ,λ). If χ is a group homomorphism from Γ to<br />
S1 (cf. Subsection 1.1.3) we can replace condition ii) by<br />
ii’) f (Az) = χ(A) f (z), for all A ∈ Γ.<br />
18
We then say that f is a <strong>Maass</strong> waveform for (Γ, χ), the space <strong>of</strong> which we<br />
denote by M(Γ, χ) or M(Γ, χ,λ). It is also known that each space M(Γ, χ,λ)<br />
is finite dimensional (see for example [39, p. 140, thm. 11.11]), that <strong>Maass</strong><br />
<strong>waveforms</strong> span the discrete part <strong>of</strong> the spectra <strong>of</strong> ∆, and that the continuous<br />
part is spanned by the Eisenstein series (see for example [50, 97] or [39]).<br />
It is an important fact that if Γ is a congruence subgroup then every <strong>Maass</strong><br />
waveform f in M(Γ, χ,λ) with λ > 0 is a cusp form, meaning that it tends<br />
rapidly to 0 in each cusp. This fact follows from [39, pp. 327(note 15),<br />
78(claim 9.6), 284(line 1), 328(line -2)] since the scattering matrix <strong>of</strong> Γ(N)<br />
can be computed explicitly and shown not to have any poles for 1<br />
2 < s < 1; cf.,<br />
e.g., [75] or [48], and [69, p. 114].<br />
We can equip the space M(Γ, χ,λ) with the Petersson inner-product,<br />
<br />
< f ,g >= f ¯gdµ,<br />
where the integration can be taken over any fundamental domain for Γ. With<br />
this inner-product M(Γ, χ,λ) is now a finite dimensional Hilbert space.<br />
If Γ is a congruence subgroup and χ is trivial on Γ(N), the eigenvalues 0 =<br />
λ0 < λ1 ≤ λ2 ≤ ···, counted with multiplicity, form a discrete sequence and<br />
a general Weyl’s law is known to hold. In particular, for Hecke congruence<br />
subgroups and the trivial character, we have (see [86, thm. 2])<br />
√ <br />
T<br />
N Γ0(N)(T ) = µ(FN)<br />
4π<br />
as T → ∞,<br />
Γ\H<br />
2κ √ √ √<br />
T − T ln T + A T + O<br />
π<br />
ln √ T<br />
, (1.3)<br />
where A is a certain constant depending on the level N and κ is the number <strong>of</strong><br />
cusps <strong>of</strong> Γ0(N).<br />
However it is widely believed (by the Sarnak-Phillips philosophy, see for<br />
example [80]) that for a “generic” non-cocompact but c<strong>of</strong>inite Fuchsian group<br />
Γ, unless there are some arithmetic or geometric symmetries present, there<br />
should only be at most a finite discrete spectra (generic here is in the sense that<br />
in some appropriate deformation space the exceptional groups have measure<br />
0).<br />
The <strong>Maass</strong> <strong>waveforms</strong> are also more mysterious than the holomorphic automorphic<br />
functions since there are only very few examples <strong>of</strong> explicit formulas<br />
for constructing <strong>Maass</strong> <strong>waveforms</strong>, whereas there are numerous examples <strong>of</strong><br />
explicit formulas for holomorphic modular functions.<br />
19
1.2 Some Structural Theory <strong>of</strong> M(Γ0(N), χ,λ)<br />
For the rest <strong>of</strong> this section we put Γ = Γ0(N) for brevity and we also assume<br />
that χ is a Dirichlet character. To facilitate the computation <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong><br />
we need as much information as possible about the various symmetries<br />
that can be used. First we will see that in the case <strong>of</strong> a real character we can<br />
assume that our functions are real-valued. Then we will consider the obvious<br />
translational symmetry which makes the Fourier expansion possible, and<br />
the reflectional symmetry which simplifies the said Fourier expansion. Then<br />
we will describe the less obvious symmetries, the Hecke operators and the<br />
involutions, which further refine the spectral eigenspaces.<br />
1.2.1 The Conjugation Operator<br />
Let f ∈ M(Γ, χ,λ) and consider the conjugation operator K, K f = f . It is<br />
clear that K commutes with the Laplacian so K f is also an eigenfunction <strong>of</strong> ∆<br />
with the same eigenvalue as f . We also see that for A ∈ Γ we get<br />
(K f ) |A(z) = K f (Az) = f (Az)<br />
= χ(A) f (z)<br />
= χ(A)(K f )(z),<br />
so K f is automorphic with respect to the conjugate <strong>of</strong> χ, i.e. K f ∈ M(Γ, χ,λ).<br />
In particular, if χ is a real character, then ¯f = K f ∈ M(Γ, χ,λ). By considering<br />
the functions 1<br />
1<br />
2 ( f + K f ) and 2i ( f − K f ) (which are real-valued) we get<br />
the following proposition.<br />
Proposition 1.2.1. If χ is a real-valued character then M(Γ, χ,λ) has a C−linear<br />
basis consisting <strong>of</strong> real-valued functions.<br />
1.2.2 The Fourier Series<br />
Notation 1.2.1. In connection with Fourier series <strong>of</strong> functions in M(Γ, χ,λ)<br />
we will use the following notation:<br />
and<br />
e(x) = e 2πix ,<br />
κn(y) = κn(R,y) = √ yKiR(2π|n|y),<br />
where λ = 1<br />
4 + R2 . Observe that κ−n(y) = κn(y).<br />
If f ∈ M(Γ, χ,λ), we define functions f j = f |σ j and we know that f j(z+1) =<br />
f (σ jSz) = f (S jσ jz) = χ(S j) f j(z) = f j(z) if the character leaves the cusp p j<br />
open.<br />
20
Let λ > 0. By separating variables in the Laplace equation it follows that f j<br />
has a Fourier expansion <strong>of</strong> the form ∑n=0 c j(n)κn(y)e(nx) (cf. [39], and recall<br />
that f is necessarily a cusp form, cf. Section 1.1.4).<br />
Proposition 1.2.2. If χ is regular for Γ then a function f ∈ M(Γ, χ,λ) admits<br />
a Fourier expansion at each cusp <strong>of</strong> Γ, and these expansions are given by the<br />
functions f j. Explicitly we have the following expansion at the cusp p j :<br />
f j = f |σ j = ∑ c j(n)κn(y)e(nx), j = 1,...,κ.<br />
n=0<br />
1.2.3 Involutions and Normalizers<br />
Definition 1.2.1. For Γ ⊆ PSL(2,R) we say that g ∈ PGL(2,R) is a normalizer<br />
<strong>of</strong> Γ in PGL(2,R) if<br />
gΓg −1 = Γ.<br />
This means in particular that A ∈ Γ ⇒ ∃B ∈ Γ such that gA = Bg. But we<br />
need a stronger definition if a character is present.<br />
We say that g is a normalizer <strong>of</strong> (Γ, χ) if g is a normalizer <strong>of</strong> Γ and for all<br />
A ∈ Γ:<br />
χ(gAg −1 ) = χ(A).<br />
The set <strong>of</strong> all normalizers <strong>of</strong> Γ in PGL(2,R) forms a group, the so-called<br />
normalizer subgroup <strong>of</strong> Γ in PGL(2,R).<br />
In the above definition we have PGL(2,R) = GL(2,R)/C, where C is the<br />
center in GL(2,R) and consists <strong>of</strong> all diagonal matrices <strong>of</strong> the form <br />
a 0<br />
0 a with<br />
a = 0.<br />
We define an action <strong>of</strong> GL(2,R) on H as follows, for g = <br />
a b<br />
c d and z ∈ H:<br />
⎧<br />
az+b<br />
⎪⎨ cz+d , if ad − bc > 0,<br />
g(z) =<br />
⎪⎩ az+b<br />
cz+d , if ad − bc < 0.<br />
Note that all <strong>of</strong> C acts trivially on H, and hence we also obtain a welldefined<br />
action <strong>of</strong> PGL(2,R) on H. And if g is a normalizer <strong>of</strong> (Γ, χ) and<br />
f ∈ M(Γ, χ,λ) then f |g ∈ M(Γ, χ,λ).<br />
The usual definition <strong>of</strong> a (linear) involution <strong>of</strong> a vector space S is a linear<br />
operator T : S → S such that T 2 = Id (or equivalently T −1 = T ).<br />
Definition 1.2.2. A linear operator T : M(Γ, χ,λ) → M(Γ, χ,λ) will be called<br />
a (Γ, χ)-involution if T 2 is the identity operator, that is<br />
for any function f ∈ M(Γ, χ).<br />
T 2 f = f<br />
21
Example 1.2.1. There are three typical examples <strong>of</strong> (Γ, χ)−involutions that<br />
we will use.<br />
1. All W ∈ PSL(2,R) which are normalizers <strong>of</strong> (Γ, χ) and satisfy W 2 ∈ Γ and<br />
χ(W 2 ) = 1 are (Γ, χ)-involutions when acting via f ↦→ f |W . In particular<br />
we will use ωN : z ↦→ −1<br />
Nz , which can be represented by<br />
0 −1<br />
√N<br />
√ N 0<br />
PSL(2,R). <br />
2. If J =<br />
1<br />
0<br />
0<br />
−1<br />
is a normalizer <strong>of</strong> (Γ, χ) then f ↦→ f |J is a (Γ, χ)involution.<br />
Note that this is just a reflection in the imaginary axis, J(z) =<br />
−¯z.<br />
It is important not to confuse the cusp normalizing map defined in the beginning<br />
with the normalizer <strong>of</strong> (Γ, χ) defined above. But some cusp normalizing<br />
maps might be normalizers <strong>of</strong> (Γ, χ) and even involutions <strong>of</strong> M(Γ, χ). In general,<br />
if it is possible, this is a very good choice <strong>of</strong> cusp normalizing map as we<br />
will see.<br />
1.2.4 The Reflection Operator<br />
By looking at the fundamental domain <strong>of</strong> PSL(2,Z) (or the Ford fundamental<br />
domain <strong>of</strong> any congruence subgroup) we see that there is an obvious symmetry;<br />
reflection in the imaginary axis. This symmetry provides us with a<br />
partitioning <strong>of</strong> the spectrum into even and odd functions and amounts actually<br />
to looking separately at Dirichlet or Neumann boundary conditions when we<br />
view the spectral problem on the fundamental domain itself (which has finite<br />
boundary points) and not on the corresponding Riemann surface PSL(2,Z)\H<br />
(with the only boundary point at the cusp).<br />
As remarked in Example 1.2.1, the reflection operator is represented<br />
by the<br />
1 0<br />
a b<br />
matrix J =<br />
, and for any matrix T = we define<br />
0 −1<br />
c d<br />
T ∗ = JT J −1 <br />
1 0 1 0 a −b<br />
=<br />
T<br />
=<br />
. (1.4)<br />
0 −1 0 −1 −c d<br />
Then J is a (Γ, χ)−involution whenever T ∗ ∈ Γ and χ(T ∗ ) = χ(T ) for all T ∈<br />
Γ. In particular this is clearly true for Γ0(N) when χ is a Dirichlet character<br />
since then χ(T ∗ ) = χ(d) = χ(T ).<br />
Suppose now that J is a (Γ, χ)−involution. We can diagonalize M(Γ, χ,λ)<br />
with respect to J and the eigenvalues will be either 1 or −1. f ∈ M(Γ, χ,λ) is<br />
said to be even or odd, respectively, if f |J = f or f |J = − f . Every even or odd<br />
22<br />
<br />
∈
function f in M(Γ, χ,λ) has a cosine resp. sine Fourier series. This can be<br />
seen as follows. Let<br />
f (z) = ∑ c(n)κn(y)e(nx)<br />
n=0<br />
with κn(y) as in Notation 1.2.1 on page 20 (remember that κ−n(y) = κn(y)).<br />
Then<br />
f |J(z) = ∑ c(n)κn(y)e(−nx)<br />
n=0<br />
= ∑ c(−n)κn(y)e(nx).<br />
n=0<br />
If f |J = f (−¯z) = ε f , then we get c(−n) = εc(n) so<br />
f (z) = ∑ c(n)κn(y)e(nx)<br />
n=0<br />
=<br />
=<br />
=<br />
∞<br />
∑<br />
n=1<br />
κn(y)(c(n)e(nx) + c(−n)e(−nx))<br />
∞<br />
∑ c(n)κn(y)(e(nx) + εe(−nx))<br />
n=1<br />
∞<br />
∑ c(n)κn(y)<br />
n=1<br />
<br />
2cos(2πnx), ε = 1,<br />
2isin(2πnx), ε = −1.<br />
Set a(n) = 2c(n) and b(n) = 2ic(n), then f will have a Fourier cosine or sine<br />
series with coefficients a(n) or b(n) respectively, i.e.<br />
f (z) =<br />
f (z) =<br />
∞<br />
∑<br />
n=1<br />
a(n)κn(y)cos(2πnx), or<br />
∞<br />
∑ b(n)κn(y)sin(2πnx).<br />
n=1<br />
So we know that f = f0 can always be taken as an eigenfunction <strong>of</strong> J, but we<br />
should also note that this need not be the case with the other Fourier series, f j.<br />
In the next section we give a condition for the simultaneous diagonalization<br />
<strong>of</strong> all f j with respect to J.<br />
1.2.5 Complete Symmetrization<br />
Since it is usually preferable to work with symmetrized Fourier series containing<br />
only cosines or sines instead <strong>of</strong> the exponential functions we make a<br />
comment on when this is possible.<br />
23
Theorem 1.2. Let u<br />
v be any cusp satisfying (u,v) = 1, v|N and v, N<br />
<br />
v = 1 or<br />
2. Then if we take p j = u<br />
v as a cusp representative, there is a choice <strong>of</strong> cusp<br />
normalizing map σ j such that if f ∈ M(Γ, χ,λ) is an eigenfunction <strong>of</strong> J with<br />
eigenvalue ε then f j is also an eigenfunction <strong>of</strong> J with the eigenvalue χ(d)ε,<br />
where d is unique modulo N determined by d ≡ 1 mod v and d ≡ −1 mod N<br />
v .<br />
Pro<strong>of</strong>. (We refer to [51, p. 36] for the basic facts).<br />
We know that every cusp for Γ has a representative <strong>of</strong> the form u<br />
v where v|N<br />
and (u,v) = 1, and u u′<br />
v and v ′ are equivalent cusps if and only if v = v ′ and u ≡<br />
u ′ mod v, N<br />
<br />
u<br />
u<br />
v . Hence v is equivalent to − v if and only if 2u ≡ 0 mod v, N<br />
<br />
v<br />
and this is possible if and only if v, N<br />
<br />
v = 1 or 2. Suppose now that this is<br />
the case, and that we have p j = u<br />
v for such choice <strong>of</strong> u, and that A = <br />
a b<br />
Nc d ∈<br />
Γ0(N) is such that Ap j = −p j. One verifies by a straightforward computation<br />
that up to a sign change (A ←→ −A), the most general form <strong>of</strong> A is given<br />
by taking c as an arbitrary integer satisfying <br />
N<br />
v cu ≡ −2 mod v (thus c is<br />
uniquely determined modulo v if v, N<br />
<br />
v = 1, and uniquely determined modulo<br />
v<br />
2 if v, N<br />
<br />
v = 2), and then letting<br />
d = a = −1 − N<br />
u(1 − d)<br />
· cu, b = .<br />
v v<br />
In particular, note that d ≡ −1 mod <br />
N and d ≡ 1 mod v.<br />
v<br />
Observe now that f |T |J = f |J|T ∗ (where T ∗ is as in (1.4)). This means in<br />
particular that if f has J−eigenvalue ε, then f j|J = f |σ j|J = f |J|σ ∗ = ε f<br />
j |σ ∗. We<br />
j<br />
can choose the cusp normalizing map <strong>of</strong> p j as<br />
√m<br />
u x<br />
0<br />
σ j =<br />
v y 0 √ m −1<br />
<br />
, (1.5)<br />
for some integers x,y satisfying uy − vx = 1 and m = N<br />
(N,v2 is the width <strong>of</strong> the<br />
)<br />
cusp p j (note that m = N N<br />
v or 2v if v, N<br />
<br />
v = 1 or 2). This choice <strong>of</strong> σ j is unique<br />
up to right multiplication with Sr for some r ∈ R. Then we will have<br />
σ ∗ j = Jσ jJ −1 √m<br />
u −x<br />
0<br />
=<br />
−v y 0 √ m −1<br />
<br />
,<br />
which is clearly a cusp normalizing map for −p j. Since Ap j = −p j, then<br />
another cusp normalizing map <strong>of</strong> −p j is the map Aσ j, and hence we have<br />
σ ∗ j = Aσ jSt for some t ∈ R.<br />
It follows that f j|J = ε f |σ ∗ = ε f<br />
j |Aσ jSt = χ(d)ε f j|St , and hence if t ∈ Z we<br />
have f j|J = χ(d)ε f j, as desired.<br />
Hence it only remains to make sure that we can obtain t ∈ Z above. In general<br />
this can always be achieved by replacing σ j by ˜σ j where σ˜ j = σ jS t 2 , since<br />
24
then ˜σ ∗ j = σ ∗ j S− t 2 = Aσ jSt S− t 2 = Aσ jS t 2 = A ˜σ j. However, if either v, N<br />
<br />
v = 1<br />
or m is odd, then we can take x and y to be integers in (1.5). To see this, note<br />
that by writing out the upper right element in the matrix relation σ ∗ j = Aσ jSt (and using au + bv = u) one obtains −x = umt + ax + by. Using the formulas<br />
for a and b this implies that mt = N d−1<br />
v cx+ v y. Hence t ∈ Z holds if and only if<br />
N d − 1<br />
cx + y ≡ 0 mod m. (1.6)<br />
v v<br />
Recall that m = N N<br />
1−d<br />
v or 2v , so that (1.6) is equivalent to v y ≡ 0 mod m. Hence<br />
we achieve our goal if we let x,y be any integers satisfying uy − vx = 1 and<br />
y ≡ 0 (mod m). This is clearly possible if either v, N<br />
<br />
v = 1 or m is odd, since<br />
then (v,m) = 1. (In the remaining case, i.e. v, N<br />
<br />
N<br />
v = 2 and m = 2v is even, one<br />
can check that one must allow x or y to be non-integral to obtain t ∈ Z.)<br />
Corollary 1. Suppose that N can be written as N = 2r p1 ··· pm, with 0 ≤ r ≤ 3,<br />
and if m > 0 then p1,..., pm are distinct odd primes, and suppose also that<br />
in every character decomposition χ = χvχ N , v|N, the character χ N is even.<br />
v<br />
v<br />
Then we can take all f j as simultaneous eigenfunctions <strong>of</strong> J with the same<br />
eigenvalue.<br />
Note that if we do not have simultaneous eigenfunctions <strong>of</strong> J we have to<br />
work (numerically) with exponentials instead <strong>of</strong> sines and cosines, and complex<br />
instead <strong>of</strong> real Fourier coefficients.<br />
1.2.6 Hecke Operators<br />
It is well-known that the classical theory <strong>of</strong> Hecke operators (cf., e.g. [5], [36]<br />
etc.) can be carried over from the case <strong>of</strong> holomorphic modular forms to the<br />
case <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong>. This section provides an outline <strong>of</strong> the theory for<br />
those not familiar with Hecke theory, and it will also serve as a recollection <strong>of</strong><br />
fundamental facts and a common ground <strong>of</strong> notation for the more experienced.<br />
The Hecke operators considered here are operators acting on spaces <strong>of</strong> modular<br />
functions (i.e. functions automorphic with respect to congruence subgroups).<br />
We will define the Hecke operators in a similar way as in Atkin-Lehner [5].<br />
Let N ∈ Z + be given. For a prime p there is a subgroup <strong>of</strong> finite index in<br />
Γ0(N),<br />
<br />
<br />
a b<br />
<br />
Γ0(N, p) =<br />
∈ Γ0(N) <br />
c d<br />
b ≡ 0 mod p .<br />
For any d ∈ Z + , we define the map Ad : z ↦→ dz in PSL(2,R). For d = p<br />
we then have A −1<br />
p Γ0(N, p)Ap = Γ0(N p) ⊆ Γ0(N) and it is easy to see that<br />
25
χ(A −1<br />
p BAp) = χ(B) so that Ap gives a map between the spaces <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong><br />
A −1<br />
p : M(Γ0(N), χ) → M(Γ0(N, p), χ), (1.7)<br />
f ↦→ fp = f |A −1<br />
p .<br />
We then want to map fp to a function once again in M(Γ0(N), χ) but in a<br />
non-trivial way (i.e. not via Ap). Let µ<br />
R j be the set <strong>of</strong> right coset repre-<br />
j=1<br />
sentatives <strong>of</strong> Γ0(N, p) in Γ0(N) used in [5, lemma 5]. R j will then have the<br />
lower right entry d ≡ 1 mod N. If V is any element in Γ0(N), then for each<br />
j there exists a unique i such that R jV = gRi for some g ∈ Γ0(N, p), and different<br />
j’ s give different i’s. Using our special choice <strong>of</strong> R j one also checks<br />
that χ(V ) = χ(g) in this relation. Thus for any function h ∈ M(Γ0(N, p), χ)<br />
it is clear that the function ∑ µ<br />
j=1 h |R j belongs to M(Γ0(N), χ). Hence we may<br />
define the operator Tp : M(Γ0(N), χ) → M(Γ0(N), χ) as follows:<br />
Tp f = 1<br />
√ p<br />
µ<br />
∑ fp|R j<br />
j=1<br />
.<br />
The factor <strong>of</strong> 1<br />
√p is a convenient normalization. Working out the coset representatives<br />
explicitly (see [5, lemma 5]) gives the following formula for a<br />
prime number p with (N, p) = 1<br />
Tp f (z) = 1<br />
p−1<br />
√<br />
p ∑ f<br />
j=0<br />
z + j<br />
p<br />
Tq f (z) = Uq f (z) = 1 √ q<br />
<br />
+ 1<br />
√ p χ(p) f (pz),<br />
and for prime q with q|N (compare, e.g., [69, p. 142 (4.5.26)]):<br />
<br />
z + j<br />
.<br />
q−1<br />
∑ f<br />
j=0<br />
We will follow the convention to call Tq with q|N an exceptional Hecke operator<br />
and denote it by Uq instead <strong>of</strong> Tq. In principle, due to the multiplicative<br />
nature <strong>of</strong> the Hecke operators (cf. Theorem 1.3 below) it is sufficient to define<br />
Hecke operators for primes, and then use the multiplicativity (cf. 1.9 below<br />
and [69, lemma 4.5.12]) to recursively define Tn for any positive integer n<br />
with (n,N) = 1. To use the above construction for a composite number n is<br />
quite elaborate and it is not done this way in the literature. Hecke (cf. [36, nos.<br />
32, 35, 36, 37 and 41, p. 859]) does not explain how he arrives at the exact<br />
definition <strong>of</strong> the operators Tn. To get a motivation for the formula (1.8) below<br />
(including the character) it is easiest to use the approach <strong>of</strong> double cosets as<br />
in Shimura ([89]) or Miyake ([69]). Using either <strong>of</strong> these constructions yields<br />
the following definition.<br />
26<br />
q
Definition 1.2.3. For any n ∈ Z + and any f ∈ M(Γ0(N), χ,λ) we define the<br />
Hecke operator Tn by the formula<br />
Tn f (z) = 1 <br />
az + j<br />
√<br />
n ∑<br />
. (1.8)<br />
d<br />
ad=n<br />
d>0<br />
d−1<br />
χ(a) ∑ f<br />
j=0<br />
Theorem 1.3. The Hecke operators Tn with (n,N) = 1 are endomorphisms <strong>of</strong><br />
the space M(Γ0(N), χ,λ) which have the following properties:<br />
TnTm = ∑<br />
d|(m,n)<br />
d>0<br />
χ(d)Tmn , (1.9)<br />
d2 for any integers n and m with (n,N) = (m,N) = 1, and (for the adjoint operator)<br />
T ∗<br />
n = χ(n)Tn. (1.10)<br />
In particular <br />
Tn<br />
(n,N) = 1 forms a commutative family <strong>of</strong> normal operators<br />
which also commutes with the Laplacian and the reflection J.<br />
Pro<strong>of</strong>. To prove the multiplicative property cf. [89, eq. (3.5.10)] and look at<br />
the action <strong>of</strong> Tn on the Fourier coefficients <strong>of</strong> a <strong>Maass</strong> waveform f . Suppose<br />
that c(k) and b(k) are the respective Fourier coefficients <strong>of</strong> f and Tn f , then the<br />
following relation holds:<br />
b(k) = ∑<br />
ad=n,a,d>0<br />
χ(a)c<br />
<br />
kd<br />
, (1.11)<br />
a<br />
with the usual convention that c(r) = 0 if r /∈ Z. We prove the equality (1.9)<br />
by comparing the action on the Fourier coefficients <strong>of</strong> the left hand side and<br />
the right hand side.<br />
Next, to prove (1.10), a quick computation using (1.9) shows that it suffices<br />
to treat the case n = p a prime. To prove that T ∗ p = χ(p)Tp one uses the<br />
following relation between the Peterson inner products on the two groups:<br />
< Tp f ,g > Γ0(N)= 1<br />
√ p < fp,g > Γ0(N,p) .<br />
This relation is an easy extension <strong>of</strong> [5, lemma 12] to the case <strong>of</strong> non trivial<br />
character using the fact that χ(R j) = 1 for all right coset representatives R j <strong>of</strong><br />
Γ0(N, p) in Γ0(N) as given in [5, lemma 5]. Alternatively: see [51, thm. 6.20]<br />
and [69, thm. 4.5.4(1)]. It is easy to show that Tn commutes with ∆ and J.<br />
Remark 1.2.1. Actually ([69, thm. 4.5.13]) we also have<br />
UqTn = TnUq,<br />
27
for q|N and (n,N) = 1 but in general the operators Uq are not normal so they<br />
are put aside for a while, until the next section, where we will introduce the<br />
space <strong>of</strong> newforms.<br />
Theorem 1.4. There exists an orthogonal basis {φ j} in M(Γ0(N), χ,λ) consisting<br />
<strong>of</strong> eigenfunctions to all Hecke operators Tn with (n,N) = 1.<br />
Pro<strong>of</strong>. Observe that M(Γ0(N), χ,λ) is a finite dimensional vector space (see<br />
[39, pp. 140, 298]) so we can choose an ON basis { f j} m j=1 and represent the<br />
operators Tn by matrices Λ(n) in this basis. From Theorem 1.3 above it is<br />
clear that Λ(n) <br />
(n,N) = 1 is a family <strong>of</strong> commuting normal m × m matrices.<br />
From elementary linear algebra arguments (the spectral theorem or [84,<br />
thm. 9.4.1]) we know that there exists a basis {φ j} m j=1 where each φ j is an<br />
eigenfunction <strong>of</strong> all Λ(n), and this is exactly what we want. Compare: [51,<br />
thm. 6.21] and [69, thm. 4.5.4(3)].<br />
1.2.7 Oldforms and Newforms<br />
From (1.11) it is clear that if f has Fourier coefficients c(n) and Tn f = λ(n) f ,<br />
then<br />
c(n) = λ(n)c(1).<br />
We would like to make sure that c(1) = 1 here, but unfortunately as we will<br />
see below, it may happen that c(1) = 0.<br />
Suppose that χ is an imprimitive character mod N <strong>of</strong> conductor q. If q|M<br />
and Md|N for some positive integers M,d, let χM be the character induced<br />
from χ on Γ0(M). Then<br />
f (z) ∈ M(Γ0(M), χM,λ) ⇒ f (z), f |Ad (z) ∈ M(Γ0(N), χ,λ)<br />
(with Ad as in section 1.2.6, cf. (1.7)), which is clear from the fact that<br />
AdΓ0(N)A −1<br />
<br />
N<br />
d = Γ0 d ,d <br />
N ⊆ Γ0 d ⊆ Γ0(M), and χ(AdBA −1<br />
d ) = χ(B).<br />
Definition 1.2.4. Let f ∈ M(Γ0(N), χ,λ). We say that f is an oldform if there<br />
exist positive integers M and d with Md|N, a character χM mod M and a<br />
function f1 ∈ M(Γ0(M), χM,λ) such that we can write f = f 1|A d . The smallest<br />
such integer M is called the conductor (or level) <strong>of</strong> f . Compare: [51, p. 107<br />
(bottom)] and [69, p. 162 (bottom)].<br />
28<br />
Suppose now that f is an oldform with Fourier series given by<br />
f (z) = ∑ c(m)<br />
m=0<br />
√ yKiR(2π|m|y)e(mx).
Then<br />
f |Ad (z) = f (dz) = ∑ c(m)<br />
m=0<br />
dyKiR(2π|m|dy)e(mdx)<br />
= √ d ∑<br />
n≡0 mod d<br />
c<br />
<br />
n<br />
<br />
√yKiR(2π|n|y)e(nx).<br />
d<br />
Hence if d > 1 then the first Fourier coefficient <strong>of</strong> f (dz) is zero. This is an<br />
example <strong>of</strong> one <strong>of</strong> the inconveniences <strong>of</strong> oldforms.<br />
Let M old (Γ0(N), χ,λ) be the linear space spanned by the oldforms and then<br />
define M new (Γ0(N), χ,λ) as the orthogonal complement with respect to the<br />
Petersson inner product. We then have<br />
M(Γ0(N), χ,λ) = M old (Γ0(N), χ,λ) ⊕ M new (Γ0(N), χ,λ).<br />
It is easy to see that both subspaces are stable under the Hecke operators Tn<br />
with (n,N) = 1, since T ∗<br />
n = χ(n)Tn.<br />
Definition 1.2.5. A function f ∈ M new (Γ0(N), χ,λ) is called a normalized<br />
newform <strong>of</strong> level N if f is an eigenfunction <strong>of</strong> J and all Hecke-operators Tn,<br />
(n,N) = 1, and the first Fourier coefficient <strong>of</strong> f is 1, i.e. c(1) = 1.<br />
Proposition 1.2.3. If χ is a primitive character mod N and q|N, then the operator<br />
Uq is unitary on M(Γ0(N), χ,λ); i.e.<br />
U ∗ q = U −1<br />
q .<br />
Pro<strong>of</strong>. The pro<strong>of</strong> is elementary (at least for prime indices N) and goes by first<br />
proving that U ∗ q = ωNUqω −1<br />
N and then using properties <strong>of</strong> the Petersson innerproduct.<br />
Here ωN is defined as in Example 1.2.1. (For a sketch <strong>of</strong> the pro<strong>of</strong><br />
see [12]).<br />
The following theorem is crucial to the theory <strong>of</strong> oldforms/newforms. See<br />
Atkin-Lehner [5] and Miyake [69] for similar results in the classical setting.<br />
For a more general adelic version, see Miyake [68]. The following version for<br />
<strong>Maass</strong> <strong>waveforms</strong> is in principle a direct adaptation <strong>of</strong> [94, thm. 4.6] to the<br />
case <strong>of</strong> non-trivial character.<br />
Theorem 1.5. Let χ be a Dirichlet character with conductor q. The spaces <strong>of</strong><br />
newforms have the following properties.<br />
(a) For each multiple N <strong>of</strong> q, the normalized newforms <strong>of</strong> level N and<br />
character χ, mN Fj , form an orthogonal basis in the newspace<br />
j=1<br />
Mnew (Γ0(N), χ,λ). If we want to stress the level and/or character<br />
we write Fj = F (N,χ)<br />
j . This is called the Hecke-(eigen)basis <strong>of</strong><br />
Mnew (Γ0(N), χ,λ).<br />
29
(b) Each Fj is an eigenfunction <strong>of</strong> all Tn with n ∈ Z + .<br />
(c) A basis in the space M(Γ0(N), χ,λ) is given by<br />
<br />
F (M,χ)<br />
<br />
<br />
i (dz) <br />
d,M ∈ Z+ <br />
,q|M ,dM|N, 1 ≤ i ≤ mM .<br />
(d) Let χ ′ be a Dirichlet character mod M. If f ∈ M new (Γ0(N), χ,λ)<br />
and g ∈ M new (Γ0(M), χ ′ , µ) with λ,µ > 0, then either there exists<br />
an infinite number <strong>of</strong> primes p for which the Hecke eigenvalues <strong>of</strong><br />
Tp are different for f and g, or else N = M, λ = µ, χ ′ = χ and<br />
f ≡ g.<br />
Pro<strong>of</strong>. Observe that the only thing that differs from [94, thm. 4.6] is that we<br />
have a non-trivial character.<br />
The pro<strong>of</strong> <strong>of</strong> (a)-(c) can be done exactly as in the pro<strong>of</strong> <strong>of</strong> [94, thm. 4.6]. The<br />
pro<strong>of</strong> <strong>of</strong> “multiplicity one”, (d) is a bit more complicated to extend. The main<br />
difference from the case <strong>of</strong> trivial character is the fact that ωN (cf. Example<br />
1.2.1) and Tn no longer commute and we need the Euler products <strong>of</strong> both f<br />
and ωN f for the pro<strong>of</strong> <strong>of</strong> Lemma 4.12 in [94], however it is a simple matter<br />
to do the same thing as in the pro<strong>of</strong> <strong>of</strong> [69, thm. 4.6.19], noting that on the<br />
newspace both Tp and Uq are normal so any eigenform <strong>of</strong> all Hecke operators<br />
Tn is also an eigenform <strong>of</strong> all T ∗<br />
n and U ∗ q (i.e T ∗<br />
n = ω −1<br />
N TnωN and U ∗ q = U −1<br />
q on<br />
the newspace).<br />
Remark 1.2.2. Note that Uq is not normal on the full space M(Γ0(N), χ,λ)<br />
(unless, <strong>of</strong> course, if χ is primitive, in which case there are only newforms) so<br />
therefore we would have no multiplicity one theorem if we tried to diagonalize<br />
the full space with respect to all Hecke operators.<br />
Theorem 1.6. Let f be a normalized newform with Tn f = λ(n) f and f |J = ε f .<br />
If the Fourier expansion <strong>of</strong> f is<br />
(where c(1) = 1) then<br />
f (z) = ∑<br />
|m|≥1<br />
c(m) √ yKiR(2πmy)e(mx)<br />
c(m) = λ(m), and<br />
c(−m) = ελ(m),<br />
for all m ∈ Z + . We also have the following multiplicativity relations<br />
30<br />
c(m)c(n) = ∑<br />
d|(m,n),d>0<br />
χ(d)c<br />
mn<br />
d 2<br />
c(m)c(p) = c(mp), p|N, m ∈ Z.<br />
<br />
, (n,N) = 1, m ∈ Z, (1.12)
Pro<strong>of</strong>. The first part follows by adding f and f |J and reordering the sum. The<br />
second part follows at once from the multiplicative relation in Theorem 1.3<br />
which then apply to the Hecke eigenvalues λ(n), and when we set c(1) = 1 in<br />
the relation c(n) = λ(n)c(1) we are done.<br />
Proposition 1.2.4. Suppose that f ∈ M new (Γ0(N), χ,λ) is a normalized newform,<br />
and that q is a prime such that q|N, then the following holds.<br />
(a) If χ is primitive then |c(q)| = 1.<br />
(b) If χ is trivial and q 2 ∤ N then c(q) = λq<br />
√q , where λq = ±1. In fact<br />
λq is the eigenvalue <strong>of</strong> −Wq, cf. Subsection 1.2.8 below.<br />
(c) If χ is trivial and q 2 |N, then c(q) = 0.<br />
Pro<strong>of</strong>. For (a), use Prop. 1.2.3. The assertions (b) and (c) are the analogs <strong>of</strong><br />
[5, thm. 3]. Compare: [69, thm. 4.6.17 and and cor. 4.6.18(2)], and [84, thm.<br />
9.4.8].<br />
Recall that by Theorem 1.5 we can always choose a Hecke eigenbasis in the<br />
newspace M new (Γ0(N), χ,λ) where the functions are normalized by c(1) = 1.<br />
We stress that if the character χ is non-trivial, then we can not in general<br />
assume that the Hecke basis is real valued. For by Theorem 1.3 we have<br />
T ∗<br />
n = χ(n)Tn whenever (n,N) = 1, and thus<br />
λ(n) = χ(n)λ(n) (1.13)<br />
and c(n) = χ(n)c(n). Hence, in particular, if χ(n) = −1 then c(n) is purely<br />
imaginary, whereas if χ(n) = 1 then c(n) is real.<br />
Remark 1.2.3. Suppose that χ is real and that f is a normalized newform in<br />
the space M new (Γ0(N), χ,λ) with f |J = ε f and Hecke eigenvalues λ(n). Then<br />
ε ¯f is also a normalized newform in M new (Γ0(N), χ,λ), but with Hecke eigenvalues<br />
λ(n). Now f and ε ¯f are in general linearly independent since λ(n) =<br />
λ(n) whenever χ(n) = 1 and λ(n) = 0. Thus the newspace M new (Γ0(N), χ,λ)<br />
is in general multidimensional.<br />
An exception to the above fact are the CM-type forms à la [46] (originally<br />
constructed by <strong>Maass</strong> in [62]). These forms are real and (hence) they have<br />
c(n) = 0 for all n ∈ Z + with (n,N) = 1 and χ(n) = 1.<br />
31
1.2.8 The Cusp Normalizing Maps as Normalizers <strong>of</strong> (Γ0(N), χ)<br />
<br />
Suppose that Q|N and = 1. Then following [5] and [6] we can attach<br />
Q, N<br />
Q<br />
a normalizer <strong>of</strong> Γ0(N) to Q, call it WQ . This can be taken <strong>of</strong> the form<br />
<br />
WQ =<br />
Qx<br />
Nz<br />
y<br />
Qw<br />
,<br />
where x,y,z,w ∈ Z, x ≡ 1 mod N<br />
Q , y ≡ 1 mod Q and Q2xw − Nzy = Q. One<br />
can also verify that WQ is a normalizer <strong>of</strong> (Γ0(N), χ) for certain χ (for examples<br />
see below). A remarkable fact about WQ is that as an operator on<br />
M(Γ0(N), χ,λ) it is independent <strong>of</strong> the choices <strong>of</strong> x,y,z and w. In fact, if<br />
W ′ Q =<br />
<br />
Qx ′ y ′ <br />
for any x ′ ,y ′ ,z ′ ,w ′ ∈ Z and detW ′ Q = Q, then (as operators)<br />
Nz ′ Qw ′<br />
W ′ Q = χQ(y ′ )χ N Q<br />
any f ∈ M(Γ0(N), χ,λ)<br />
(x ′ )WQ (see [6, prop. 1.1]). In particular, this implies that for<br />
f |J|WQ = χQ(−1) f |WQ|J.<br />
For us the normalizer WQ will be most useful for real characters because <strong>of</strong><br />
the following proposition (cf. [6, prop. 1.1]).<br />
<br />
Proposition 1.2.5. Suppose that Q|N and Q, N<br />
<br />
Q = 1, and let χ = χQχ N .<br />
Q<br />
Then for any f ∈ M(Γ0(N), χ,λ) we have WQ f = f |WQ ∈ M(Γ0(N), χQχ N ,λ),<br />
Q<br />
and W 2 Q f = χQ(−1)χ N (Q) f . In particular, if χQ is real and χQ(−1)χ N (Q) = 1<br />
Q<br />
Q<br />
then WQ maps M(Γ0(N), χ,λ) into itself and WQ is a (Γ, χ)−involution.<br />
The normalizer WQ can in many cases be taken to be a cusp normalizing<br />
map, as explained in the following proposition.<br />
<br />
Proposition 1.2.6. Suppose that Q|N and = 1. Then we can choose<br />
WQ as a cusp normalizing map <strong>of</strong> the cusp Q<br />
N .<br />
Q, N<br />
Q<br />
In reference to Definition 1.1.4, note that WQ is equal to Q − 1 2WQ ∈ PSL(2,R).<br />
Pro<strong>of</strong>. We may choose x = z = 1 in the formula for WQ, that is<br />
<br />
WQ =<br />
Q<br />
N<br />
y<br />
wQ<br />
,<br />
where y,w ∈ Z, and Qw − N<br />
Q<br />
Qy = 1. Note that the width <strong>of</strong> the cusp N is<br />
32<br />
<br />
N,<br />
N<br />
N<br />
Q<br />
2 =<br />
N<br />
Q<br />
N<br />
<br />
Q, N<br />
Q<br />
= Q
can be written<br />
uniquely up to a translation as σ = Aρ, where A ∈ SL(2,Z) maps ∞ to Q<br />
N , and<br />
ρ is a scaling by the width <strong>of</strong> the cusp. Hence, writing WQ as<br />
<br />
1 y Q 0<br />
WQ =<br />
,<br />
0 1<br />
(cf. [51, p. 37]). We know that the cusp normalizing map <strong>of</strong> Q<br />
N<br />
N<br />
Q wQ<br />
we see that WQ is a cusp normalizing map for Q<br />
N .<br />
Another interesting property <strong>of</strong> WQ is the following (cf. [6, prop. 1.2, 1.3]).<br />
Proposition 1.2.7. Let Q ∈ Z + <br />
be such that Q|N and<br />
and p be primes with (p,N) = 1, q|N and (q,Q) = 1. Then<br />
TpWQ f = χQ(p)WQTp f , and<br />
UqWQ f = χQ(q)WQUq f ,<br />
Q, N<br />
Q<br />
<br />
= 1, and let q<br />
for f ∈ M(Γ0(N), χ,λ), where χQ is the character mod Q induced by χ (i.e. χ =<br />
χQχ N ).<br />
Q<br />
Observe that for a Hecke eigenfunction f we get Tp(WQ f ) = χQ(p)WQTp f =<br />
χQ(p)λpWQ f where λp is the Hecke eigenvalue <strong>of</strong> f for Tp. In other words<br />
WQ f is also an eigenfunction <strong>of</strong> Tp with eigenvalue λpχQ(p). In view <strong>of</strong> “mul-<br />
tiplicity one” (cf. Thm. 1.5 (d)), if χQ ≡ 1 and f is a newform, then WQ f must<br />
be a multiple <strong>of</strong> f , i.e. WQ f = µQ f , where µ 2 Q = χ N (Q) (cf. Prop. 1.2.5).<br />
Q<br />
Now if we choose the cusp normalizer σ j <strong>of</strong> Q<br />
N as σ j = WQ (cf. Prop. 1.2.6),<br />
then we have f j = µ j f1 , and in terms <strong>of</strong> the different Fourier expansions, this<br />
means that (for all k)<br />
c j(k) = µ jc1(k), (1.14)<br />
where µ 2 j = χ N (Q). This relation can either be used as a means to test the<br />
Q<br />
accuracy <strong>of</strong> our program or to reduce the size <strong>of</strong> the linear system in Section<br />
1.3.2 (cf. the normalization (B) on p. 38). However, it is important to observe<br />
that (1.14) does not in general allow us to reduce the Fourier coefficients at all<br />
cusps to the ones at i∞. Cf. Prop. 1.2.6.<br />
Our comment in Prop. 1.2.4(b) about −Wq is justified by combining the<br />
foregoing remarks with the three references cited in the pro<strong>of</strong> <strong>of</strong> Prop. 1.2.4.<br />
Cf. [6, §1,2], [51, pp. 113–118] and [69, cor. 4.6.18] for some related ideas.<br />
33
1.3 <strong>Computational</strong> <strong>Aspects</strong><br />
1.3.1 Introduction<br />
We know that a <strong>Maass</strong> waveform f ∈ M(Γ0(N), χ,λ), with λ > 0 is completely<br />
described by its Fourier series at ∞, but unfortunately to assure stability<br />
<strong>of</strong> the numerical method we need knowledge <strong>of</strong> the Fourier series at all<br />
cusps <strong>of</strong> F, i.e. for 1 ≤ j ≤ κ,<br />
f j(z) = ∑ c j(n)κn(y)e(nx).<br />
|n|≥1<br />
The aim here is to compute such functions f , that is, we wish to find an eigenvalue<br />
λ = 1<br />
4 +R2 (for convenience we will usually refer to R as the eigenvalue)<br />
and a set <strong>of</strong> Fourier coefficients {c j(n)|1 ≤ j ≤ κ, |n| ≥ 1}. In general (the<br />
exceptions are the CM-type forms, cf., e.g., [46]) there are no known formulas<br />
for neither the eigenvalues nor the coefficients and we have to be content with<br />
numerical approximations.<br />
There are two steps (Phase 1 and Phase 2) in the algorithm. First we locate R<br />
(up to the desired accuracy) and an initial set <strong>of</strong> Fourier coefficients, and then,<br />
if we want to, we can use this initial set to generate a larger set <strong>of</strong> coefficients.<br />
1.3.2 Phase 1<br />
The method here is a generalization <strong>of</strong> Hejhal’s algorithm in [43] to groups<br />
with several cusps and non-trivial characters, and some <strong>of</strong> the ideas are also<br />
inspired by the algorithm by Selander and Strömbergsson in [95]. The idea is<br />
that given a real number R we use linear algebra to compute a set <strong>of</strong> numbers<br />
that are likely to be close to “true” Fourier coefficients if R is close to a “true”<br />
eigenvalue <strong>of</strong> a <strong>Maass</strong> waveform.<br />
Preliminary Numerical Remarks<br />
First we introduce an “effective zero”. In standard double precision arithmetic<br />
we know that x + 10 −16 x ≈ x, so if we fix ε < 10 −16 then a truncation error <strong>of</strong><br />
ε can in principle be neglected (computationally). We will use [[ε]] to denote<br />
a quantity with absolute value less than ε.<br />
Suppose that f ∈ M(Γ0(N), χ,λ) with Fourier expansions at the cusps<br />
f j(z) = ∑ c j(n)κn(y)e(nx), 1 ≤ j ≤ κ. (1.15)<br />
|n|≥1<br />
There is a trivial (a priori) bound on the coefficients: c j(n) = O( √ n) (cf. [39,<br />
p. 585] and [50, thm. 3.2]). Combining this with κn(y) = √ yKiR (2π|n|y) and<br />
the fact that KiR(u) ∼ π<br />
2ue−u , as u → ∞ (for fixed R), we see that the tail<br />
<strong>of</strong> the sum (1.15) satisfies ∑|n|≥M = O e−2πyM as M → ∞, with the implied<br />
34
constant depending on R and y. Hence for any fixed y (and R) we can take<br />
M = M(y) such that<br />
f j(z) = ∑<br />
1≤|n|≤M(y)<br />
c j(n)κn(y)e(nx) + [[ε]], (1.16)<br />
for 1 ≤ j ≤ κ. Using similar observations as in [43, p. 311] it is clear that, for<br />
R large, we can take M(y) as<br />
<br />
R + AR<br />
M(y) =<br />
1 <br />
3<br />
, (1.17)<br />
2πy<br />
for some constant A. In practice it turns out that A = 12 or 15 is good enough.<br />
We will now see how to use the automorphy condition ((1.19) below) to get a<br />
good linear system that can be solved for the c j(n).<br />
The Linear System<br />
In order to make the algorithm stable we need to use the Fourier coefficients<br />
at all cusps, which means that we have to use different expansions at different<br />
regions in a clever way as follows (see also [95]). Recall the notation from<br />
Subsection 1.1.2.<br />
We will view f ∈ M(Γ0(N), χ,λ) as pieced together <strong>of</strong> the Fourier series<br />
at all cusps, meaning that we use the f j that is most convenient at each point.<br />
Hence, given w ∈ FN we will use the identity<br />
f (w) = χ(U −1<br />
w ) f I(w)(σ −1<br />
I(w) Uww). (1.18)<br />
Cf. Remark 1.1.1 on p. 15.<br />
Given any point z ∈ H and any j ∈ {1,...κ}, we let z j = σ jz (which may<br />
or may not be inside FN), and let w j be the pullback <strong>of</strong> z j into FN, i.e. w j =<br />
Tj(z j) ∈ FN with Tj ∈ Γ0(N), and let z∗ −1<br />
j = σI( j) Uw jw j (here I( j) = I(w j)), then<br />
z∗ −1<br />
j = σI( j) Uw jTjσ jz, so<br />
f j(z) = f (σ jz) = f (T −1 −1<br />
j Uw j σI( j)z ∗ j)<br />
= χ(T −1 −1<br />
j Uw j ) fI( j)(z ∗ j). (1.19)<br />
This relation (implicit automorphy, cf. [43, p. 298 (15)]) between f j(z) and<br />
fI( j)(z∗ j ) is what enables us to get hold <strong>of</strong> all Fourier series. Consider the<br />
truncated Fourier series<br />
ˆf j(z) = ∑<br />
1≤|n|≤M(y)<br />
c j(n)κn(y)e(nx).<br />
One way to view this series is as a Discrete Fourier Transform, and we can<br />
perform an inverse transform over the following set <strong>of</strong> sampling points along<br />
35
a horocycle:<br />
<br />
<br />
<br />
zm = xm + iY <br />
xm = 1<br />
<br />
1<br />
(m − ), 1 − Q ≤ m ≤ Q ,<br />
2Q 2<br />
for some Y < Y0 (recall (1.2) on page 15), and Q > M(Y ). The inverse transform<br />
gives us that for 1 ≤ |n| ≤ M(Y ) < Q we have<br />
c j(n)κn(Y ) = 1<br />
2Q<br />
= 1<br />
2Q<br />
Q<br />
∑<br />
m=1−Q<br />
Q<br />
∑<br />
m=1−Q<br />
ˆf j(zm)e(−nxm)<br />
f j(zm)e(−nxm) + [[ε]],<br />
where in the last step we used (1.16). This system is now almost a tautology,<br />
but we can use the implicit automorphy (1.19) to get a good “mix” <strong>of</strong> the<br />
Fourier coefficients and a far from trivial system.<br />
Mimicking the the discussion leading to (1.18) we let Tm j ∈ Γ0(N) be the<br />
pullback map <strong>of</strong> σ jzm into FN, and let wm j = Tm j(σ jzm) ∈ FN, I(m, j) =<br />
−1<br />
= σI(m, j) Um jwm j. Furthermore we let χm j =<br />
). Using (the analog <strong>of</strong>) (1.19) we then obtain:<br />
I(wm j), Um j = Uwm j ∈ Γ0(N), z∗ m j<br />
χ(T −1 −1<br />
m j Um j<br />
c j(n)κn(Y ) = 1<br />
2Q<br />
Q<br />
∑ χm j fI( j,m)(z<br />
m=1−Q<br />
∗ m j)e(−nxm) + [[ε]],<br />
and we now want to substitute the truncated Fourier expansion for fI( j,m).<br />
Since we know that ℑ(z∗ −1<br />
m j ) = ℑ(σI( j,m) Um jTm jσ j(zm j)) ≥ Y0 we can actually<br />
use the same truncation point, M0 = M(Y0) for all series, and in interchanging<br />
the order <strong>of</strong> summation we get the following expression, valid for 1 ≤ |n| ≤<br />
M(Y ) < Q and 1 ≤ j ≤ κ :<br />
where<br />
c j(n)κn(Y ) =<br />
V ji 1<br />
nk =<br />
2Q<br />
Q<br />
∑<br />
m=1−Q<br />
I( j,m)=i<br />
κ<br />
∑<br />
∑<br />
i=1 1≤|k|≤M0<br />
ci(k)V ji<br />
nk + 2[[ε]], (1.20)<br />
χm jκk(y ∗ m j)e(kx ∗ m j)e(−nxm). (1.21)<br />
Remark 1.3.1. It seems clear that in order for the system (1.20) to be useful,<br />
we need to use the automorphy relation non-trivially sufficiently <strong>of</strong>ten. In<br />
practice we found that a necessary (and sufficient!) condition for the numerics<br />
to behave well is that z ∗ m j = zm for all j,m. This condition is ensured if we<br />
36
keep ℑ(z∗ m j ) > Y for all j,m. This is <strong>of</strong> course automatically fulfilled if we<br />
choose Y < Y0 as above, but in many cases it is possible to verify numerically<br />
that the same inequality also holds for certain choices <strong>of</strong> Y (slightly) larger<br />
than Y0. This means that we may be able to use a Y > Y0 and a corresponding<br />
M(Y ) < M0. The drawback is that such a Y can not be used for Phase 2 later<br />
since there the pullbacks z∗ m j <strong>of</strong> the horocyclic points zm will eventually fill out<br />
the whole fundamental domain (as Q → ∞ and Y → 0 simultaneously).<br />
We now have a linear system that can be used to obtain the coefficients.<br />
Note that the V ji<br />
nk can be small due to either the K-Bessel decay or “bad mixing”<br />
in the sense that the numbers <strong>of</strong> m such that I( j,m) = i might differ<br />
much (meaning that the pullback <strong>of</strong> the horocycle does not encircle each cusp<br />
equally much). Bad mixing is avoided basically through increasing the length<br />
<strong>of</strong> the horocycle by means <strong>of</strong> decreasing Y . The system (1.20) can be expressed<br />
as<br />
0 =<br />
κ<br />
∑<br />
∑<br />
i=1 |k|≤MY<br />
ci(k) ˜V ji<br />
nk + 2[[ε]], (1.22)<br />
where ˜V ji ji<br />
nk = Vnk − δnkδ jic jκn(Y ). The term −κn(Y ) occurring in all diagonal<br />
entries gives us good reason to hope that this system should turn out to be<br />
well-conditioned, just as in [43, p. 298 (19) and second paragraph <strong>of</strong> p. 299]).<br />
We now have a linear system which is satisfied by (linear combinations <strong>of</strong>)<br />
Fourier coefficients <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong> f ∈ M(Γ0(N), χ,λ) (up to the error<br />
2[[ε]]). If we let V denote the (κM0 × κM0)−matrix ˜V ji<br />
nk and C denote the<br />
κM0−vector <strong>of</strong> Fourier coefficients c j(k), we can write the system as<br />
VC = 0. (1.23)<br />
Observe that the solution space <strong>of</strong> this system for a true eigenvalue R is at least<br />
a 1-dimensional linear space, so in order to get a unique solution we need to<br />
use some sort <strong>of</strong> normalization.<br />
Of course, if f and all the various f j are all Fourier cosine series, there is<br />
an immediate “cosine” counterpart <strong>of</strong> (1.23). Similarly for sine series. This<br />
remark is important in all cases where Cor. 1 applies. The matrix coefficients<br />
in these analogs <strong>of</strong> (1.23) are all real!<br />
Normalization<br />
Depending on the dimension <strong>of</strong> the particular space M(Γ0(N), χ,λ) we are<br />
investigating, we have to employ different types <strong>of</strong> normalizations algorithmically.<br />
In order to test the accuracy <strong>of</strong> our coefficients (cf. p. 41 below) we<br />
will always try to get eigenfunctions <strong>of</strong> Hecke operators and/or involutions<br />
whenever possible. We will now discuss two examples (A) and (B) <strong>of</strong> possible<br />
normalizations.<br />
37
(A) Newforms, trivial character. According to a standard conjecture (and<br />
experimental findings) the space <strong>of</strong> newforms with trivial character should<br />
have dimension 1. So, by Theorem 1.5 we can search for a normalized newform<br />
by setting c1(1) = 1 and dropping the first equation from V . If we find a<br />
true R-value under this assumption, the coefficients will automatically satisfy<br />
all multiplicative relations (cf. Theorem 1.6).<br />
(B) N and real primitive χ satisfying the hypotheses <strong>of</strong> Cor. 1. To discuss<br />
this case some preliminaries are necessary. We present them in outline form.<br />
1) Let MR(Γ0(N), χ,λ) ⊆ M(Γ0(N), χ,λ) be the space <strong>of</strong> all real-valued<br />
<strong>Maass</strong> <strong>waveforms</strong>. By simple use <strong>of</strong> the operator K, one sees that<br />
M(Γ0(N), χ,λ) = MR(Γ0(N), χ,λ) + iMR(Γ0(N), χ,λ)<br />
as vector spaces. The operators WQ and Tn are all endomorphisms on the<br />
spaces M(Γ0(N), χ,λ) and MR(Γ0(N), χ,λ) (see Prop. 1.2.5 and Thm. 1.3).<br />
One knows that W 2 Q = ±Id, and that TnWQ = χQ(n)WQTn for (n,N) = 1 (can<br />
be proved by induction on Prop. 1.2.7.)<br />
3) When χ is primitive, there are no oldforms. Cf. Thm. 1.5. Thm. 1.5(d)<br />
assures us <strong>of</strong> multiplicity one for any newforms.<br />
4) Apply Thm. 1.4 to M(Γ0(N), χ,λ) and get an orthogonal basis F1,...,Fm<br />
consisting <strong>of</strong> normalized newforms. (Do not confuse things here with (1.15).)<br />
By Thm. 1.6 and Cor. 1 each Fj is either a cosine or sine series at infinity and<br />
remains <strong>of</strong> the same type at the other cusps.<br />
5) It is now natural to apply Remark 1.2.3 to the basis functions Fj. If we<br />
form the the normalized newform εFj there are two possibilities.<br />
a) We arrive back at Fj. This is equivalent to saying λ(n) = λ(n), for all n.<br />
Since λ(n) = χ(n)λ(n), for (n,N) = 1, by (1.13), this would imply λ(n) = 0<br />
whenever χ(n) = −1.<br />
b) We arrive at a form independent <strong>of</strong> Fj. By mult. 1, we thus have that<br />
the sequences λ(n) and λ(n) are essentially different as n → ∞. Accordingly,<br />
here, via (1.13), we have λ(n) =nonzero pure imaginary for infinitely many<br />
primes with χ(n) = −1. While, λ(1) = 1, <strong>of</strong> course.<br />
6) We apply 5) to each Fj, and thus deduce a natural splitting <strong>of</strong> the basis<br />
{F1,...,Fm} into singlets and pairs.<br />
7) In pursuing the numerics on the machine, we hypothesize (at least initially)<br />
that either m = 1 (singlet) or m = 2 (one pair) for our given space<br />
M(Γ0(N), χ,λ). In the following comments, we assume ε = 1. The treatment<br />
<strong>of</strong> ε = −1 is similar.<br />
8) Take m = 1 first. Look at 1<br />
2F1. This is a unit normalized real cosine<br />
series. Its expansions at the other cusps are again real cosine series. Take the<br />
cosine analog <strong>of</strong> (1.23) and declare λ(1) = 1. Solve the system in the usual<br />
way with two parallel Y. This case should have a unique solution.<br />
38
Cases where χ(n) = −1 should yield coefficients that are exactly 0. This<br />
will be very compelling to see! (Cf. Table 1.5, right column.)<br />
9) Now assume m = 2. The (complex) basis is {F1,F2}, where F2 = εF1 =<br />
F1 is the “Remark 1.2.3 flip” <strong>of</strong> F1. The idea here is to construct a real basis<br />
from F1 and F2. To this end we construct F+ = 1<br />
4 (F1 + F2) and F− =<br />
1<br />
4i (F1 − F2). These functions are now real cosine series at all cusps. F+ is<br />
unit normalized, while the n = 1 term for F− is zero. Observe that the Fourier<br />
coefficients <strong>of</strong> F+ and F− are ℜ(λ(n)) and ℑ(λ(n)) respectively (here λ(n)<br />
are the coefficients <strong>of</strong> F1).<br />
The “cosine” analog <strong>of</strong> (1.23) holds. To single out F+, we impose the condition<br />
that λ(n) = 0 for χ(n) = −1. We reduce the size <strong>of</strong> the “cosine” system<br />
(1.23) accordingly, and set λ(1) = 1, and use our two parallel Y. This process<br />
determines λ (the eigenvalue) and F+. If we instead impose the condition<br />
λ(n) = 0 for χ(n) = 1, and set λ(p0) = 1 where χ(p0) = −1 and use the appropriately<br />
reduced “cosine” system with parallel Y , we obtain aF− with some<br />
nonzero a ∈ R. To get F1 and F2, we form 2F+ ± 2i <br />
1<br />
a aF− and determine a<br />
either by Prop. 1.2.4(a) or by use <strong>of</strong> relation (1.12). If desired, λ can again be<br />
solved for at this stage <strong>of</strong> the game.<br />
10) An alternative reduction in the size <strong>of</strong> the “cosine” system (1.23) can be<br />
achieved by looking at the action <strong>of</strong> WQ on M(Γ0(N), χ,λ). Cf. Prop. 1.2.7<br />
and the discussion afterwards. (This discussion can be generalized to (n,N) =<br />
1 by induction; notice too that there are no oldforms when χ is primitive.)<br />
Each WQ (Fj) must be a nonzero multiple <strong>of</strong> some Fk by virtue <strong>of</strong> its Hecke<br />
action. Depending on whether m = 1 or 2, the resulting permutation structure<br />
must either be (1), (12), or (1)(2). In each instance, the relation W 2 Q = ±Id<br />
affords one some a priori control on any “non zero constants” that arise.<br />
Let {WQ1 ,...,WQr } be any commutative family <strong>of</strong> WQ’s satisfying W 2 Q = Id<br />
and the hypotheses <strong>of</strong> Prop. 1.2.5. Cf. [6, prop. 1.4]. Since each WQ acts<br />
unitarily, it is natural to seek a basis <strong>of</strong> MR(Γ0(N), χ,λ) consisting <strong>of</strong> simultaneous<br />
eigenfunctions <strong>of</strong> the WQ j . By Prop. 1.2.6, the Fourier expansion <strong>of</strong><br />
any such basis function at the cusp Q j<br />
N will be “redundant”; there is thus a<br />
corresponding reduction in the size <strong>of</strong> the “cosine” analog <strong>of</strong> (1.23).<br />
Remark 1.3.2. If Cor. 1 applies, the reduction with respect to the WQ’s, as<br />
mentioned above, can be applied also to the case <strong>of</strong> the trivial character in a<br />
similar manner.<br />
Remark 1.3.3. Note that in the case <strong>of</strong> N = 4 and trivial character, using<br />
Thm. 1.2 and the fact that the cusp normalizing map <strong>of</strong> the cusp p3 = − 1<br />
2 ,<br />
σ3 : z ↦→ z<br />
2z+1 is in the normalizer <strong>of</strong> Γ0(4) we can actually use pure sine/cosine<br />
series and real coefficients at all cusps in this case too. And we can also use<br />
reduction with respect to σ2 = ωN and σ3. This is not true in general for nonsquare-free<br />
levels, e.g. Γ0(9). Then we must use complex arithmetic.<br />
39
Example 1.3.1. As an illustration <strong>of</strong> (B) consider the case <strong>of</strong> prime level N ≡<br />
1 mod 4 and χ = <br />
N . With the notation as in (B), for the sake <strong>of</strong> simplicity,<br />
·<br />
suppose that m = 2 and ε1 = ε2 = 1. Let F1 and F2 = F1 be the Hecke eigenbasis<br />
<strong>of</strong> normalized newforms in M(Γ0(N), χ,λ). There is only one WQ, i.e. ωN,<br />
which is now also a cusp normalizing map, and ω2 N = Id. We will see how to<br />
diagonalize with respect to ωN to get a reduction <strong>of</strong> the linear system. Observe<br />
that Tn (ωNF1) = χ(n)ωNTnF1 = χ(n)λ(n)ωNF1, and hence by multiplicity one<br />
we must either have ωNF1 = ±F1 (since ω2 N = Id) or we have ωNF1 = µF2 and<br />
ωNF2 = µ −1F1, for some constant µ ∈ S1 (again since ω2 N = Id). In case<br />
that ωNF1 = ±F1 we already have an eigenfunction <strong>of</strong> ωN in F1 and we don’t<br />
have to do anything more. If µ = ±1 then the functions F±(defined under (B))<br />
are also invariant under ωN, i.e. ωNF± = ±F± if µ = 1 and ωNF± = ∓F± if<br />
µ = −1. If µ = ±1, then we can form<br />
f± = 1<br />
1 ± µ (F1 ± µF2).<br />
It is easily verified that f± are both unit normalized (have first Fourier coefficient<br />
equal to 1), real-valued on H, and satisfy ωN f± = ± f±. Denote<br />
the Fourier coefficients <strong>of</strong> f+ and f− by c + (n) and c − (n), respectively. For<br />
(n,N) = 1, one immediately checks that<br />
and<br />
c + (n) = c − (n) = λ(n) for χ(n) = +1<br />
c + (n)c − (n) = λ(n) 2 ≤ 0 for χ(n) = −1.<br />
To find f+, we use the “cosine” analog <strong>of</strong> (1.23). We reduce the size <strong>of</strong> the<br />
system by using the fact that ωN is a cusp normalizing map, i.e. we set<br />
c2(k) = c1(k), k = 1,...,M0<br />
together with c1(1) = 1. And then we drop the corresponding equations. Similarly<br />
for f−. In this case, when we run with the parallel Y, we have a lot <strong>of</strong><br />
extra tests; Hecke relations coming from the λ(n), c + (n) = c − (n) if χ(n) = 1<br />
and c + (n)c − (n) ≤ 0 if χ(n) = −1. All these can be used as independent tests<br />
for the accuracy <strong>of</strong> our program.<br />
By running through the search for λ both for f+ and f− we get further<br />
insurance.<br />
Locating the Eigenvalues<br />
We will see how, with the use <strong>of</strong> the normalized linear system introduced<br />
above, we can locate an eigenvalue R. Cf. [44, p. 5]<br />
Consider the linear system (1.23). The entries <strong>of</strong> the coefficient matrix<br />
40
V = V (R,Y ) are clearly real-analytic functions <strong>of</strong> R, but as functions <strong>of</strong> Y<br />
they might be only piecewise continuous. For a value <strong>of</strong> R corresponding to<br />
a <strong>Maass</strong> waveform f we expect the solution vector C = C(R,Y ) to give us<br />
the actual Fourier coefficients if the appropriate normalization is used (e.g.<br />
c(1) = 1), and Y is kept less than Y0 for the sake <strong>of</strong> well-conditioning.<br />
This fact is used to determine whether a given R is close to a true eigenvalue<br />
or not by solving for C(R,Y ) and looking for known properties <strong>of</strong> Fourier<br />
coefficients <strong>of</strong> a <strong>Maass</strong> waveform. The three most important properties (here)<br />
are:<br />
a) Invariance under change <strong>of</strong> Y . As described above, for a true<br />
eigenvalue the solution vector will be invariant when we change<br />
Y (keeping Y < Y0).<br />
b) Hecke relations. We can look for Hecke eigenfunctions by seeking<br />
solutions which satisfy multiplicative relations (cf. (1.12)),<br />
for example the relation c1(2)c1(3) = c1(6).<br />
c) Involutions <strong>of</strong> (Γ0(N), χ). We use cusp normalizing maps which<br />
are involutions with eigenvalues, µ j = ±1, and seek solution vectors<br />
which satisfy c j(k) = µ jc1(k) (cf. (1.14), Example 1.3.1, and<br />
B item 10).<br />
For a given interval I = [R1,R2], we want to find all <strong>Maass</strong> <strong>waveforms</strong> with<br />
eigenvalues R in this interval. The idea here is to do this by solving the linear<br />
system (1.23) for two different values <strong>of</strong> Y in parallel and then try to find R ∈ I<br />
such that the solution vectors C(R,Yi) match (usually we only require the first<br />
few coefficients to match, and use the rest only as an insurance).<br />
In practice we first divide I into a number <strong>of</strong> equally sized small chunks:<br />
R1 = x0 < ··· < x j < ··· < xN1 = R2,<br />
where the number N1 is chosen in a way that it is probable that any interval<br />
Ij = [x j,xj+1] contains at most one eigenvalue, using e.g. Weyl’s law (1.3) and<br />
some assumption on the behaviour <strong>of</strong> the nearest-neighbour spacings (e.g. that<br />
they are exponentially distributed).<br />
We then look at each small Ij to see if there is a change <strong>of</strong> sign in any<br />
<strong>of</strong> the differences ck − c ′ k , k = 2,3,4, where ck = ck(R,Y1) and c ′ k = c′ k (R,Y2)<br />
are entries in C(R,Y1) and C(R,Y2) respectively. If there are sign changes<br />
for all considered differences in an interval Ij0 we go to the next stage <strong>of</strong> the<br />
investigation and “zoom in” into this interval. At this point we usually form a<br />
functional<br />
h(R) = ω2(c2 − c ′ 2) + ω3(c3 − c ′ 3) + ω4(c4 − c ′ 4),<br />
41
and try to minimize it over this interval. We use ω j ∈ {±1} to “align” the<br />
differences so that h(R) changes sign where all three differences change sign.<br />
The minimization can be done in a number <strong>of</strong> ways. One very efficient approach<br />
is to use the method <strong>of</strong> false position to get successively better approximations<br />
to the location <strong>of</strong> the minimum (which if it exists is near a point<br />
where h changes sign).<br />
When a value <strong>of</strong> R that approximates a zero <strong>of</strong> h is found it is listed as a<br />
candidate for a true eigenvalue. These candidates are stored and subjected to<br />
further examination.<br />
Remark 1.3.4. Zeros <strong>of</strong> the K-Bessel functions in the left hand side <strong>of</strong> (1.20)<br />
(or “random noise”) can trigger false indications <strong>of</strong> zeros in the intervals Ij0 .<br />
Keeping track <strong>of</strong> how fast c j − c ′ j changes over each interval, most <strong>of</strong> these<br />
“false” intervals are immediately discarded.<br />
If we only use two Y -values and a few coefficients, it can not be excluded that<br />
the located minimum <strong>of</strong> h is not close to a real eigenvalue, but such mistakes<br />
will be spotted either when we try to refine the eigenvalue or when we look<br />
closer at properties a)-c) for a larger set <strong>of</strong> coefficients.<br />
Eventually we declare that the R which we have found is close to an eigenvalue<br />
<strong>of</strong> the Laplacian, and that our {c j(n)} are close to the Fourier coefficients<br />
<strong>of</strong> the corresponding <strong>Maass</strong> waveform. It is worth stressing that, strictly<br />
speaking, these assertions are never proved rigorously through our computations<br />
— although the excellent agreement seen when testing properties a) -<br />
c) on a large number 1 <strong>of</strong> coefficients on top <strong>of</strong> those used in the functional<br />
h(R) clearly gives a very strong heuristic justification. The question <strong>of</strong> giving<br />
rigorous pro<strong>of</strong>s is dealt with in a forthcoming paper [15].<br />
Remark 1.3.5. To speed up the process <strong>of</strong> looking for sign changes over the<br />
large number <strong>of</strong> small intervals Ij we use Lagrange interpolation to evaluate<br />
the matrix V at this point (usually interpolation <strong>of</strong> degree 14 is good enough).<br />
Cf. [44, p. 6].<br />
It should be remarked that the algorithm reproduces both the known oldforms<br />
from Γ0(1) (see [45] or [42]), the newforms on Γ0(5) as in [9], as well<br />
as the explicitly known CM-forms (cf. [46]).<br />
There is obviously no guarantee that we find all eigenvalues in a specified<br />
interval in this manner, but comparing the results with the detailed version <strong>of</strong><br />
Weyl’s law (1.3) might give us an indication <strong>of</strong> missing eigenvalues (cf. [9,<br />
§A.1] and [8, §8]).<br />
1 e.g. 50-10000 produced by the Phase 2 algorithm, cf. Section 1.3.3<br />
42
The Pullback Algorithm<br />
Since the implicit automorphy (1.19) plays an important part in the algorithm,<br />
it is crucial to have an efficient means to compute the pullback z ∗ ∈ FN <strong>of</strong> a<br />
point z ∈ FN (observe that the notation z ∗ differs from the one used earlier).<br />
We recall that in the case <strong>of</strong> the modular group Γ0(1), it is easy to make a<br />
pullback to the standard fundamental domain, F1 = {z = x + iy ∈ H||x| ≤<br />
1<br />
1<br />
2 , |z| ≥ 1} using a sequence <strong>of</strong> “flip-flops” through the generators E : z ↦→ − z<br />
and S : z ↦→ z + 1 (cf. [84, p. 51] or [9, pp. 44-46]).<br />
Instead <strong>of</strong> extending this algorithm to the case <strong>of</strong> Γ0(N) by using side pairing<br />
generators <strong>of</strong> a suitable fundamental domain, we will use the facts that<br />
Γ0(N) is a subgroup <strong>of</strong> finite index in PSL(2,Z), and that it is easy to find a<br />
set <strong>of</strong> coset representatives.<br />
Let {Vj} vN<br />
j=1 and FN = ∪Vj(F1) be as on p. 14. Given z ∈ FN we make a<br />
pullback into F1; ˜z = T (z) ∈ F1 with T ∈ Γ0(1). Then we find the index j such<br />
that T −1 ∈ Γ0(N)Vj, and note that VjT ∈ Γ0(N). Hence the Γ0(N) pullback <strong>of</strong><br />
z is given by<br />
z ∗ = VjT (z) ∈ FN.<br />
This gives a pullback algorithm for any N, but we need the coset representatives<br />
{Vj} vN<br />
vN<br />
j=1 to apply it. The observation that {Vj} j=1 is by definition a<br />
<br />
maximal set <strong>of</strong> vN = N ∏p|N 1 + p−1 maps in PSL(2,Z), all independent<br />
over Γ0(N) allows us to use the following simple recursive algorithm:<br />
"Traverse Γ0(1) as a tree in S, E and S −1 and collect maps independent over<br />
Γ0(N) until exactly vN independent maps have been found."<br />
This calculation is done once and for all for each group and the resulting representatives<br />
are stored. A possible alternative here is to use explicit formulas<br />
for the coset representatives, but the advantage <strong>of</strong> the above algorithm is that<br />
it can be extended to other congruence subgroups, such as Γ1(N), Γ 0 (N) or<br />
Γ(N) as well. Actually it can be extended to any finite-index subgroup <strong>of</strong><br />
PSL(2,Z) that possesses some precise characteristic which we can use to see<br />
if a given map belongs to the group or not.<br />
1.3.3 Phase 2<br />
After Phase 1 is completed we have an (approximate) eigenvalue R and a<br />
corresponding set <strong>of</strong> (approximate) Fourier coefficients<br />
<br />
c j(k) <br />
1 ≤ j ≤ κ, 1 ≤ |k| ≤ M0 .<br />
43
Suppose now that we want to compute c j(n) for NA ≤ n ≤ NB. Going back to<br />
the identity (1.20),<br />
c j(n)κn(Y ) =<br />
κ<br />
∑<br />
∑<br />
i=1 |k|≤M0<br />
ci(k)V ji<br />
nk + 2[[ε]]<br />
(valid for Y < Y0, 1 ≤ |n| ≤ M(Y ) < Q and 1 ≤ j ≤ κ), we see that in order<br />
to compute c j(n) for n ∈ [NA,NB] (where NB > M0), we take Y < Y0 such that<br />
M(Y ) > NB. To avoid cancellation we also have to make sure that the particular<br />
choice <strong>of</strong> Y does not make κn(Y ) too small. We can now formulate the core<br />
<strong>of</strong> Phase 2 as a theorem.<br />
Theorem 1.7. Suppose that f ∈ M(Γ0(N), χ, 1<br />
4 + R2 ) has Fourier coefficients<br />
c j(n) . Let Y < Y0, and let n,Q be integers such that Q > M(Y ) and 1 ≤<br />
|n| ≤ M(Y ). We then have<br />
c j(n) = ∑κ ji<br />
i=1 ∑|k|≤M0 ci(k)Vnk + Errn(Y ), (1.24)<br />
κn(Y )<br />
where V ji<br />
nk is given by (1.21) on p. 36, and the error Errn(Y ) is given by<br />
Errn(Y ) = [[ε]]<br />
κn(Y ) .<br />
In order to use Theorem 1.7 to successfully compute the Fourier coefficients<br />
we have to adjust the value <strong>of</strong> Y (and accordingly M(Y ) and Q also) to keep<br />
the error Errn(Y ) from growing.<br />
If we just want to confirm the existence <strong>of</strong> an eigenvalue in the neighbourhood<br />
<strong>of</strong> R, or if we want to make a picture <strong>of</strong> an eigenfunction, the first set <strong>of</strong><br />
coefficients from Phase 1 is usually sufficient. But, even for those purposes,<br />
the method <strong>of</strong> Phase 2 is a very cheap way to improve the last part <strong>of</strong> the<br />
already obtained coefficients, as well as obtaining a lot more.<br />
1.3.4 Remarks on the Performance <strong>of</strong> the Algorithm<br />
The main difference (with regard to performance issues) between groups with<br />
one cusp, e.g. the modular group or Hecke triangle groups, and the groups<br />
Γ0(N) with N > 1 should now be clear. The presence <strong>of</strong> extra cusps introduces<br />
more sets <strong>of</strong> coefficients, thus increasing the size <strong>of</strong> the linear system used in<br />
Phase 1. We will give some examples <strong>of</strong> how the relevant factors scale with<br />
respect to N (and R).<br />
44
Table 1.1: Time to compute compute the coefficient vector for R = 9.5336... on a<br />
3.2GHz CPU<br />
Timing for a Single R<br />
N M0 T (R,N)<br />
2 13 0.03s<br />
5 32 0.14s<br />
13 90 1.17s<br />
17 118 2.20s<br />
41 307 23.9s<br />
101 757 287.4s<br />
Suppose we are given a level N and a potential eigenvalue R, and that we want<br />
to compute the corresponding (minimal) set <strong>of</strong> coefficients, C = {c j(n)|1 ≤<br />
|n| ≤ M0, 1 ≤ j ≤ κ}, i.e. we have to solve the system (1.22) under some normalization<br />
assumption. Let T (R,N) be the time required to perform this task.<br />
It turns out in practice that the time required to solve the system is negligible<br />
compared to the time required to compute the coefficient matrix, and the<br />
main contribution to T (R,N) in fact comes from the K-Bessel computations.<br />
Observe that in the evaluation <strong>of</strong> V ji<br />
nk the only K-Bessel terms we need are<br />
) for 1 − Q ≤ m ≤ Q, these are independent <strong>of</strong> n and i, hence the<br />
KiR(2π|k|y ∗ m j<br />
total number <strong>of</strong> K-Bessel computations is 2Q(M0κ) ∼ 2κM2 0 (as we can take<br />
Q ∼ M0). Using Y0 ≥<br />
√ 3<br />
2N we see that, roughly M0 = [const]N(R + 1), and<br />
T (R,N) ≪ κN 2 (R + 1) 2 . (1.25)<br />
Remember that κ is dependent on the number <strong>of</strong> prime factors <strong>of</strong> N, and for<br />
a prime number κ = 2. From this formula we see that the time to compute<br />
even a single eigenfunction with a small eigenvalue increases drastically as<br />
the level N grows. No matter how much we improve the speed <strong>of</strong> computing<br />
the individual K-Bessel functions, attaining levels like N ≈ 1000 seems to<br />
be out <strong>of</strong> reach at the present time. In table 1.1 we give some examples <strong>of</strong><br />
T (R,N) for different (prime) N, with R = 9.5336... (the first eigenvalue on<br />
PSL(2,Z)).<br />
Recall steps 1-3 on p. 41. To find eigenvalues we need to compute the<br />
matrix V (R,Y ) at least 14 × 2 = 28 times for step 1 (using Lagrange interpolation<br />
<strong>of</strong> degree 14 for the function R ↦→ V (R,Y ), cf. Remark 1.3.5) and then<br />
at least 6×2 = 12 times for the step 3 (assuming that it takes approximately 6<br />
iterations with the method <strong>of</strong> false position to obtain the required precision).<br />
45
The K-Bessel Function<br />
The K-Bessel function is computed using a number <strong>of</strong> different algorithms,<br />
each with different range <strong>of</strong> applicability (cf. [42], [98] and [9]).<br />
One possible way to speed things up is to use an adaptive Lagrange interpolation<br />
method for the function x ↦→ KiR(x). However, due to the oscillatory<br />
nature <strong>of</strong> KiR(x) for small x we need a large number <strong>of</strong> interpolation points<br />
when N is large (i.e. when Y0 is small) so this type <strong>of</strong> interpolation is in general<br />
only efficient in Phase 2 or when R is large .<br />
Timing for Phase 2<br />
Since we only use the first few V ji<br />
nk with |k| ≤ M0 in Theorem 1.7 we need<br />
about 2QM0κ K-Bessel calls to compute c j(n). Remember here that for (1.24)<br />
to hold we need Q > M(Y ) > |n|, and we also need Y < const (1 + R)/n,<br />
hence, if we take Y = [const] · (1 + R)/n,then we have M(Y ) = [const] · (1 +<br />
R)/Y = [const] · n. The time to compute one coefficient c j(n) is thus roughly<br />
proportional to<br />
nκM0 = κN(R + 1)n,<br />
and hence the time to compute the first A coefficients is approximately proportional<br />
to<br />
κN(R + 1)A 2 , as A → ∞.<br />
Observe that the K-Bessel functions in V ji<br />
nk does not depend on n or i. Hence<br />
to avoid unnecessary computations we can use a vector to store all 4QκM0<br />
K-Bessel values used in (1.24). We will then only need to perform these<br />
computations when we change Y, but unfortunately we will have to deal with<br />
memory issues instead, and these can degrade the performance as much as<br />
the computations themselves. To compute a large number <strong>of</strong> coefficients we<br />
have to keep a balance between the number <strong>of</strong> computations and the size <strong>of</strong><br />
the allocated memory. In practice this is a rather difficult task.<br />
1.4 Results<br />
The focus <strong>of</strong> the current project has been to provide a robust and efficient<br />
algorithm for computing <strong>Maass</strong> <strong>waveforms</strong> on Hecke congruence subgroups<br />
Γ0(N) for any integer N. The following are our main results so far.<br />
1. Extensive lists <strong>of</strong> eigenvalues for small and prime N = 5,7,13, with either<br />
trivial<br />
<br />
character or the real Dirichlet character mod N given by the symbol<br />
N<br />
· .<br />
2. Shorter lists <strong>of</strong> eigenvalues for all N ≤ 30. More precisely, we believe our<br />
lists contain all eigenvalues with R ≤ 10 for N = 1,2,3,4,5,6,7,8,9,10, 11,<br />
46
12, 13, 14, 15, 17, 19, 21, 22, 23, 25, 26,29, R ≤ 5 for N = 16,20,24, R ≤ 3<br />
for N = 30 and R ≤ 2 for N = 18,27 and 28.<br />
3. The first eigenvalue, λ1 = 1<br />
4 + R21 , for all prime N ≤ 131.<br />
4. Large sets <strong>of</strong> Fourier coefficients for a few <strong>Maass</strong> <strong>waveforms</strong>, e.g. for N =<br />
5 the following coefficients have been computed: all c(n) with |n| ≤ 70209<br />
for R = 3.2642...; all c(n) with |n| ≤ 89263 for R = 4.8937...; all c(n)<br />
with |n| ≤ 56420 for R = 4.1032... (the first two eigenvalues correspond<br />
to the character <br />
N<br />
· and the last one corresponds to the trivial character).<br />
Work on extending these data, as well as carrying out more extensive statistical<br />
tests, is currently being pursued. In this section we will give some<br />
examples and comments on each item in the above list.<br />
Further data than that which is presented in this section is available from<br />
the author upon request.<br />
1.4.1 Eigenvalues<br />
Tables 1.6, 1.3 and 1.4 provide some examples <strong>of</strong> eigenvalues for different<br />
groups. In tables 1.3 and 1.4 the eigenvalues <strong>of</strong> the operators J and ωN are<br />
indicated in the respective columns. The eigenvalues are denoted by − for<br />
−1, + for 1, and ∗ is used to indicate that both eigenvalues are present. In all<br />
tables we use H1 = |c1(2)c1(3) − c1(6)| as one indication <strong>of</strong> the accuracy <strong>of</strong><br />
the program (we based our search on property a) on p. 41; hence no Hecke<br />
relation like H1 was built in to our algorithm).<br />
It should be remarked that in the case <strong>of</strong> Table 1.6, Γ0(4), all computed<br />
newforms are eigenfunctions with eigenvalue −1 <strong>of</strong> both non-trivial cusp normalizers,<br />
i.e. σ2 = ω4 : z ↦→ −1/4z, and σ3 : z ↦→ z/(2z + 1), which are both<br />
Γ0(4)−involutions.<br />
1.4.2 Lowest Eigenvalues<br />
We have used the Phase 1 algorithm to compute small eigenvalues for the<br />
groups M(Γ0(N), χ) as N ranges through the primes up to 131 and χ is either<br />
trivial or the real Dirichlet character <br />
N<br />
· . The first located eigenvalues are<br />
listed in Table 1.2.<br />
Recall that all eigenvalues fall into distinct classes with respect to the involutions<br />
J and ωN. We denote the classes by {++,+−,−+,−−}.<br />
In the case <strong>of</strong> a non-trivial character, CM-forms are present, and in all cases<br />
considered such a form was found to occur as the lowest eigenvalue. All the<br />
CM-forms occurring here are <strong>of</strong> the type considered in [20] (i.e. the narrow<br />
class number <strong>of</strong> Q[ √ N] is 1), and by the explicit formula (cf. [20, p. 112]) the<br />
CM-forms with lowest eigenvalues are <strong>of</strong> the type − − . In table 1.2, H1and<br />
H2 are two parameters indicating the error. H1 is always defined by H1 =<br />
47
Figure 1.1: Histogram <strong>of</strong> Fourier coefficients for <strong>Maass</strong> forms on Γ0(5), 5 ·<br />
350<br />
300<br />
250<br />
200<br />
150<br />
100<br />
50<br />
0<br />
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2<br />
(a) R = 3.2642... (CM-form)<br />
250<br />
200<br />
150<br />
100<br />
50<br />
0<br />
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2<br />
(b) R = 4.8937...<br />
|c1(2)c1(3) − c1(6)|, and H2 is defined as either the true error in R for CM-<br />
<br />
forms, or as H2 = |c1(N)| − 1<br />
<br />
<br />
(cf. Prop. 1.2.4) otherwise.<br />
√ N<br />
1.4.3 Fourier Coefficients<br />
Table 1.5 gives some examples <strong>of</strong> Fourier coefficients and Hecke relations<br />
obtained by the Phase 2 algorithm. Figure 1.1 (a) is a histogram <strong>of</strong> the co-<br />
efficients c1(p) <strong>of</strong> the CM-form with eigenvalue 3.26... where the first 3407<br />
primes for which χ(p) = = 1 are used. Figure 1.1 (b) is a histogram<br />
5<br />
p<br />
<strong>of</strong> the ˜c1(p) for one <strong>of</strong> the <strong>Maass</strong> <strong>waveforms</strong> on (Γ0(N), χ5) with eigen-<br />
5<br />
value R = 4.8937.... Here ˜c1(p) = c1(p) if χ(p) = p = 1 and −ic1(p)<br />
<br />
5<br />
if χ(p) = p = −1 (to get real coefficients), and the first 7462 primes are<br />
used. The experimentally obtained density functions (curves) in Figures 1.1<br />
(a) and (b) should be compared with the known density function 1<br />
<br />
π 4 − x2 − 1 2<br />
in the CM-case (a) and the conjectured density function 1<br />
√<br />
2π 4 − x2 in the non-<br />
CM case (b) (cf. [46, 45]).<br />
48
Table 1.2: Lowest eigenvalues for Γ0(N)<br />
N χ J ωN R H1 H2<br />
2 - - 5.4173348068447 0.3E-13 0.5E-12<br />
3 - - 4.38805356322 0.1E-10 0.8E-11<br />
5 - - 3.02837629306 0.4E-11 0.7E-12<br />
<br />
5· 5 - - 3.264251302636 0.7E-11 0.2E-12 CM<br />
7 - - 1.92464430511 0.2E-11 0.8E-11<br />
11 - - 2.03309099385 0.3E-12 0.1E-11<br />
13 - - 0.9708154174 0.7E-10 0.2E-10<br />
<br />
13· 13 - - 1.31473442107 0.1E-10 0.7E-12 CM<br />
17 - - 1.4414285450 0.5E-10 0.3E-10<br />
<br />
17· 17 - - 0.7498863406 0.5E-10 0.4E-10 CM<br />
19 - - 1.0919915598 0.2E-13 0.3E-10<br />
23 - + 1.3933371415 0.6E-10 0.2E-10<br />
29 + + 1.017266551 0.5E-09 0.8E-09<br />
<br />
29· 29 - - 0.953598000 0.3E-11 0.5E-10 CM<br />
31 + + 0.789356178 0.8E-10 0.4E-08<br />
37 - - 0.64230596 0.4E-08 0.6E-08<br />
<br />
37· 37 - - 0.630391294 0.7E-09 0.7E-09 CM<br />
41 + + 0.66572483 0.9E-08 0.3E-08<br />
<br />
41· 41 - - 0.37767450 0.2E-08 0.1E-07 CM<br />
43 - - 0.65545239 0.5E-09 0.7E-08<br />
47 - + 0.5854522 0.5E-07 0.1E-08<br />
53 - - 0.8039894582 0.2E-12 0.4E-08<br />
<br />
53· 53 - - 0.799094454 0.5E-10 0.8E-09 CM<br />
59 + + 0.595829688 0.4E-10 0.3E-08<br />
61 - - 0.4180624 0.4E-07 0.9E-07<br />
<br />
61· 61 - - 0.42868522 0.2E-08 0.3E-08 CM<br />
67 - - 0.67759021 0.3E-07 0.1E-08<br />
71 + + 0.35745048 0.8E-08 0.5E-08<br />
73 - - 0.517887505 0.1E-08 0.2E-09<br />
CM This is a CM-form. For definition <strong>of</strong> H2 see the end <strong>of</strong> the table<br />
49
N χ J ωN R H1 H2<br />
<br />
73·<br />
73<br />
- - 0.20488585 0.5E-07 0.7E-08 CM<br />
79 + + 0.55177485 0.2E-06 0.9E-12<br />
83 - + 0.640287578 0.3E-09 0.3E-09<br />
89 + + 0.4894360 0.1E-07 0.1E-07<br />
<br />
89· 89<br />
- - 0.2273961 0.3E-08 0.6E-07 CM<br />
97 - - 0.41693167 0.1E-07 0.8E-08<br />
<br />
97· 97<br />
- - 0.16846 0.4E-05 0.1E-05 CM<br />
101 + + 0.45375925 0.6E-09 0.3E-08<br />
103 - - 0.56540670 0.9E-08 0.5E-10<br />
107 - + 0.5816789 0.2E-07 0.8E-07<br />
109 - - 0.423655 0.2E-05 0.9E-07<br />
<br />
109 - - 0.2822870 0.8E-09 0.3E-07 CM<br />
109<br />
·<br />
113 - - 0.46200265 0.4E-09 0.3E-07<br />
<br />
113 - - 0.21379233 0.2E-08 0.8E-08 CM<br />
113<br />
·<br />
127 + + 0.373385109 0.5E-07 0.4E-10<br />
131 - + 0.261072758 0.7E-09 0.4E-11<br />
CM This is a CM-form<br />
For a CM-form H2 is the true error and for a non-CM form we know<br />
by Proposition 1.2.4(a) that |c(N)| = 1, and we put H2 = ||c(N)| − 1|.<br />
Table 1.3: Eigenvalues for N = 29, χ = <br />
29<br />
·<br />
50<br />
R J ωN H1 H2 a<br />
0.9535979998 - - 0.9E-10 0.5E-10 (CM)<br />
1.804894697229 - * 0.2E-13 0.2E-12<br />
1.907196000095 + + 0.3E-13 0.6E-12 (CM)<br />
1.9491483792 + * 0.9E-14 0.2E-10<br />
2.1682948312 - * 0.7E-13 0.3E-10<br />
2.8084567797 - * 0.8E-12 0.4e-10<br />
2.8252375274 + * 0.2E-13 0.8E-10<br />
2.8607940001 - - 0.5E-13 0.1E-11 (CM)<br />
a H2 is the true error in R for CM-forms and otherwise<br />
|c+(4) − c−(4)|. Cf. Remark 1.3.1.
Table 1.4: Eigenvalues for N = 23, χ = 1<br />
R J ωN H1 H2 = ||c(23)| − 1<br />
√ 23 | a<br />
1.3933371415 - + 0.8E-11 0.4E-11<br />
1.5061266371 - - 0.3E-11 0.1E-10<br />
1.5795892401 + + 0.7E-12 0.3E-11<br />
1.9352504926 - - 0.3E-11 0.3E-10<br />
2.4307774166 - - 0.1E-10 0.9E-10<br />
2.4643338705 + + 0.7E-11 0.9E-09<br />
2.4936237868 - + 0.2E-11 0.7E-11<br />
2.5321343295 + + 0.1E-11 0.1E-09<br />
2.6109599620 + - 0.4E-12 0.3E-11<br />
2.7362777132 - + 0.1E-10 0.1E-09<br />
2.8079149467 - - 0.6E-13 0.1E-10<br />
3.0166209534 + - 0.3E-11 0.5E-11<br />
3.2357419725 + + 0.2E-12 0.2E-10<br />
3.3723339187 - - 0.2E-10 0.8E-11<br />
3.5202562438 + - 0.1E-11 0.8E-13<br />
3.5245436383 - + 0.5E-10 0.1E-09<br />
3.5882850865 - + 0.9E-12 0.3E-11<br />
3.7062705391 - - 0.6E-10 0.2E-12<br />
3.8167552363 + - 0.3E-12 0.4E-12<br />
3.8189248762 - - 0.5E-10 0.2E-09<br />
3.8400352089 + + 0.6E-11 0.1E-11<br />
3.9122175318 + + 0.9E-10 0.7E-10<br />
4.16025275662 + + 0.5E-12 0.1E-11<br />
4.19680364676 - - 0.6E-11 0.4E-11<br />
4.23167066214 - + 0.9E-10 0.5E-09<br />
4.30661013365 - - 0.7E-11 0.8E-11<br />
4.43672242684 + + 0.4E-10 0.8E-08<br />
4.44033811150 + + 0.7E-10 0.6E-08<br />
4.50005039136 - + 0.6E-10 0.4E-11<br />
4.50100759650 + - 0.1E-11 0.2E-12<br />
4.73923930491 - + 0.1E-11 0.5E-12<br />
4.78525397008 - - 0.7E-12 0.3E-11<br />
4.83751695193 - - 0.5E-11 0.6E-11<br />
4.85889850005 + - 0.2E-10 0.8E-10<br />
4.88226240518 + - 0.3E-10 0.1E-10<br />
4.98487107442 - + 0.4E-10 0.1E-08<br />
4.99908300143 - + 0.2E-10 0.6E-10<br />
a From Proposition 1.2.4(b) we know that |c(23)| = 1<br />
√23 .<br />
51
Table 1.5: Fourier coefficients for N = 5 and χ = <br />
5<br />
·<br />
52<br />
R = 4.893781291438 R = 3.264251302636 (CM) a<br />
c(2) 1.217161411799i<br />
c(3) 0.295119713347i<br />
c(5) b exp(1.157414657530i)<br />
c(7) −1.138873755146i<br />
c(11) −0.041396292578<br />
c(13) −0.558344591841i<br />
c(17) −0.212576664102i<br />
c(19) 0.608670097807<br />
c(23) −1.205831908853i<br />
c(29) 0.162328579004<br />
c(31) −0.556019364974<br />
c(37) 0.411889174623i<br />
c(41) −0.835153489179<br />
c(43) −1.240299728133i<br />
c(47) −0.605458209042i<br />
c(53) 1.458187614411i<br />
c(59) 0.922374897976<br />
c(61) −1.247703551349<br />
c(67) 0.33772433772i<br />
c(71) −0.74219625846<br />
c(73) −0.44062515256i<br />
c(79) 0.71467631335<br />
c(83) 0.99829038428i<br />
c(1553) −1.3885884029i<br />
c(72977) −0.9912088597i<br />
c(2) 0 0.1E-12<br />
c(3) 0 0.1E-12<br />
c(5) -1 0.1E-12<br />
c(7) 0 0.1E-12<br />
c(11) −1.11318397521973 0.2E-07<br />
c(13) 0 0.4E-11<br />
c(17) 0 0.1E-10<br />
c(19) −0.17157173156738 0.6E-08<br />
c(23) 0 0.5E-09<br />
c(29) 0.44610100984573 0.1E-07<br />
c(31) −0.16668809652328 0.6E-08<br />
c(37) 0 0.4E-11<br />
c(41) 0.84569376707077 0.1E-07<br />
c(43) 0 0.1E-10<br />
c(47) 0 0.6E-10<br />
c(53) 0 0.1E-09<br />
c(59) −0.59840279817581 0.5E-08<br />
c(61) −1.82808148860931 0.4E-07<br />
c(67) 0 0.1E-08<br />
c(71) 1.29922688007355 0.5E-07<br />
c(73) 0 0.1E-12<br />
c(79) −1.48637688159943 0.2E-07<br />
c(83) 0 0.1E-12<br />
c(89) 1.43317067623138 0.5E-07<br />
c(97) 0 0.1E-12<br />
Some Corresponding Hecke relations (for R = 4.893781291438)<br />
|c(2)c(3) − c(6)| 0.2E-12<br />
|c(93) − c(3)c(31)| 0.3E-11<br />
|c(895) − c(5)c(179)| 0.1E-11<br />
|c(15625) − c(5) 6 | 0.1E-10<br />
||c(5)| − 1| 0.1E-12<br />
|c(195) − c(3)c(5)c(13)| 0.2E-11<br />
|c(9763) − c(13)c(751)| 0.3E-10<br />
|c(72991) − c(47)c(1553)| 0.2E-09<br />
a Since coefficients <strong>of</strong> CM-forms can be computed explicitly (cf. [46, p. 5]), the first<br />
column contains the coefficients computed according to the explicit formula, and<br />
the second column is the difference between this value and the value obtained with<br />
the methods presented in this paper.<br />
b By Proposition 1.2.4(a) we know that |c(5)| = 1.
Table 1.6: Eigenvalues for Γ0(4)<br />
Sine Cosine<br />
R H1 H2 c<br />
3.70330780123 5E-12 7E-12<br />
b 5.41733480684 2E-13 1E-12<br />
6.62042287384 1E-12 5E-13<br />
b 7.22087197596 2E-12 4E-12<br />
b 8.27366588959 4E-12 1E-12<br />
8.52250301688 8E-13 2E-13<br />
a 9.53369526135 3E-12 4E-12<br />
9.93491995937 3E-13 7E-13<br />
b 10.71270690070 2E-13 3E-10<br />
10.76471068319 3E-13 2E-13<br />
b 11.31767970147 4E-13 5E-13<br />
11.97277669404 1E-12 4E-12<br />
a 12.17300832468 2E-12 2E-12<br />
b 12.82198816197 8E-13 4E-13<br />
b 13.31016428347 9E-13 2E-12<br />
b 14.09720373392 9E-12 2E-12<br />
14.1438850658 2E-11 1E-11<br />
a 14.3585095183 2E-11 4E-11<br />
14.97031306857 2E-12 2E-12<br />
b 15.27402248481 2E-12 3E-13<br />
b 15.4428777438 7E-12 6E-11<br />
15.8093206166 2E-11 1E-11<br />
a 16.1380731715 3E-13 2E-11<br />
16.4782589777 1E-11 1E-12<br />
a 16.6442592019 1E-11 8E-12<br />
b 17.3193334036 8E-12 2E-11<br />
b 17.4931127227 2E-11 3E-11<br />
17.6699198653 2E-11 1E-12<br />
R H1 H2 c<br />
5.879354157759 3E-13 6E-13<br />
8.042477591693 7E-12 4E-13<br />
b 8.92287648699 5E-12 2E-12<br />
9.859896162239 7E-13 9E-13<br />
b 10.92039200294 4E-12 3E-12<br />
b 12.09299487508 1E-13 3E-11<br />
12.87761656411 1E-12 2E-13<br />
13.17207496748 5E-12 7E-12<br />
a 13.77975135189 2E-12 1E-10<br />
14.47780273166 1E-13 7E-13<br />
b 14.68501595060 2E-10 7E-12<br />
b 15.31419658418 9E-12 2E-12<br />
15.7434456453 2E-11 6E-11<br />
16.09359237739 7E-12 6E-12<br />
b 16.4041087751 5E-11 7E-11<br />
c 16.94026094636 1E-11 3E-12<br />
17.19512721203 8E-12 2E-12<br />
a 17.73856338106 8E-12 1E-11<br />
b 17.8780025394 2E-11 2E-11<br />
18.24637789203 1E-12 3E-12<br />
18.6207750965 1E-11 2E-11<br />
b 19.12542240816 8E-12 1E-11<br />
a 19.42348147083 9E-12 6E-12<br />
19.69901979586 1E-12 7E-12<br />
19.7785769776 1E-11 7E-11<br />
a Oldform from Γ0(1). This eigenspace is 3-dimensional.<br />
b Oldform from Γ0(2). This eigenspace is 2-dimensional.<br />
c From Proposition 1.2.4(c) we know that |c(4)| = 0 for newforms, and it is easy<br />
to see that in an oldspace f±(z) = f (z) ± ε f (dz), d|4, ε ∈ {±1} (cf. notation<br />
in Remark 1.3.1, and hence c+(n) = c−(n) for (n,4) = 1. Accordingly we set<br />
H2 = |c(4)| for newforms and H2 = |c+(5) − c−(5)| for oldforms.<br />
53
2 Computation <strong>of</strong> <strong>Maass</strong> Waveforms with<br />
Non-trivial Multiplier Systems<br />
2.1 Introduction<br />
In this chapter we will consider computational aspects <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong><br />
on the modular group PSL(2,Z), and the Hecke-congruence subgroups Γ0(N),<br />
non-zero weight and a non-trivial multiplier system.<br />
First we will introduce the basic theory <strong>of</strong> multiplier systems and then we<br />
will introduce the notion <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong> in this context. We will also<br />
provide some details on the different operators that acts on spaces <strong>of</strong> <strong>Maass</strong><br />
<strong>waveforms</strong> with non-trivial multiplier system.<br />
As we will see in section 2.8, we only need to make a few minor changes in<br />
the algorithm we used to compute <strong>Maass</strong> <strong>waveforms</strong> <strong>of</strong> weight 0 (cf. Chapter<br />
1) to adapt it to the case <strong>of</strong> non-zero weight and non-trivial multiplier system.<br />
The biggest obstacle to overcome is the numerical evaluation <strong>of</strong> the Whittaker<br />
function, which is the non-zero weight analogue <strong>of</strong> the K-Bessel function.<br />
The algorithm used to compute this function is presented in Chapter 4.<br />
The last section contains some examples <strong>of</strong> the results that has been obtained<br />
with the described methods. To my knowledge, the only previous computational<br />
investigation <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong> with non-zero weight was performed<br />
by Mühlenbruch, [70], but his method has less accuracy and a smaller<br />
range <strong>of</strong> applicability than the methods to be presented in this chapter.<br />
2.2 Multiplier Systems<br />
2.2.1 Introduction<br />
We will give a brief introduction to multiplier systems, for more extensive<br />
treatments see [39, pp. 331-338], [77], or [84, pp. 70-87].<br />
Let Γ be a Fuchsian group and m be even. Classically, a function ϕ, meromorphic<br />
on the upper half-plane H, which satisfies<br />
ϕ(Az) = ΘA(z;m)ϕ(z) = (cz + d) m <br />
a b<br />
ϕ(z), ∀A = ∈ Γ, (2.1)<br />
c d<br />
55
is called an automorphic form <strong>of</strong> weight m. The function<br />
ΘA(z;m) = (cz + d) m <br />
, A =<br />
a<br />
c<br />
b<br />
d<br />
∈ Γ<br />
is said to be an automorphy factor on Γ. The classical theory <strong>of</strong> automorphic<br />
forms is well-known; for instance, if m = 2, then the automorphic forms can be<br />
identified with the meromorphic differential forms <strong>of</strong> degree 1 on the orbifold<br />
(classical Riemann surface) Γ\H.<br />
We observe that, for even m, the number (cz + d) m is uniquely defined and<br />
the automorphy factor ΘA(z;m) in (2.1) clearly satisfies<br />
ΘA(Bz;m)ΘB(z;m) = ΘAB(z;m). (*)<br />
To generalize these notions to arbitrary real m, there needs to be a choice<br />
<strong>of</strong> branch <strong>of</strong> the argument, and to make certain everything is well-defined, we<br />
have to introduce the notion <strong>of</strong> a multiplier system.<br />
Definition 2.2.1. We will always use the principal branch <strong>of</strong> the argument,<br />
−π < Arg(w) ≤ π. Define<br />
jA(z;m) = e imArg(cz+d) m <br />
(cz + d)m cz + d 2 a b<br />
= =<br />
, A = ∈ SL(2,R).<br />
|cz + d| m cz + d<br />
c d<br />
To adapt the relation (*), we also write<br />
σm(A,B) = jA(Bz;m) jB(z;m) jAB(z;m) −1 . (2.2)<br />
It is clear that for integer m, σm(A,B) = 1, but it can also be shown (cf. [77,<br />
§2, pp. 42–50]) that the only values which σm can take are {1,e ±2πim }.<br />
It is customary to write σm(A,B) = exp[2πimw(A,B)] as in [84, eq. (3.2.1)].<br />
Let Γ be the inverse image <strong>of</strong> Γ under the natural homomorphism SL(2,R) →<br />
PSL(2,R). (Note that this forces −I ∈ Γ.)<br />
Definition 2.2.2. A multiplier system v <strong>of</strong> weight m on Γ is a function v : Γ →<br />
S 1 (where S 1 ⊂ C is the unit circle), such that<br />
• v(−I) = e −πim , and<br />
• v(AB) = σm(A,B)v(A)v(B), ∀A,B ∈ Γ.<br />
Observe that v can be regarded equally well as a multiplier system <strong>of</strong> any<br />
weight m ′ ≡ m mod 2. The question <strong>of</strong> whether there exist multiplier systems<br />
<strong>of</strong> a given weight and on a given group is most easily answered by the<br />
following proposition (cf. [39, prop. 2.1, p. 333]).<br />
Proposition 2.2.1. Given v : Γ → S 1 and m ∈ R. The following are equivalent:<br />
56
• v(T ) is a multiplier system <strong>of</strong> weight m on Γ.<br />
• There exists a function ϕ ≡ 0 on H which is either C∞ or meromorphic<br />
such that<br />
ϕ(T z) = v(T )ϕ(z)(cz + d) m <br />
, ∀T =<br />
a<br />
c<br />
b<br />
d<br />
∈ Γ.<br />
A function ϕ as above which satisfies<br />
ϕ(T z) = v(T )ϕ(z)(cz + d) m , ∀T =<br />
<br />
a b<br />
c d<br />
<br />
∈ Γ,<br />
is called an automorphic form <strong>of</strong> weight m and multiplier system v on Γ.<br />
Definition 2.2.3. Given a multiplier system v on Γ and an element α ∈ GL(2,R)<br />
we define a multiplier system, vα , on the group α−1Γα by<br />
<br />
αAα−1 ,α<br />
v α (A) = v αAα<br />
−1 σm<br />
σm (α,A)<br />
, A ∈ α −1 Γα.<br />
That this indeed gives a multiplier system on α −1 Γα is shown in [63, p.<br />
138].<br />
Using Prop. 2.2.1, we will construct the two most popular multiplier systems<br />
in the following sections. Compare: [39, pp. 334-337].<br />
2.2.2 The η multiplier system<br />
The η-function<br />
The Dedekind η−function is a holomorphic function on H, defined by<br />
<br />
z<br />
∞<br />
η(z) = e (1 − e(nz)),<br />
24<br />
∏<br />
n=1<br />
where e(x) = e2πix . Note that η can be expressed by the following Fourier<br />
series:<br />
η(z) =<br />
<br />
∑ cne n +<br />
n≥0<br />
1<br />
<br />
z ,<br />
24<br />
⎧<br />
⎪⎨ 1, n = 6m<br />
cn =<br />
⎪⎩<br />
2 ± m,<br />
−1, n = 6m2 0,<br />
± 5m + 1,<br />
otherwise.<br />
It is clear from the definition that η(z) = 0 for z ∈ H and that, for each k ∈ R,<br />
η 2k can be defined as a holomorphic function on H. (Cf. [84, p. 205].) It is<br />
57
easily seen that η 2k has a Fourier series <strong>of</strong> the form<br />
η(z) 2k = e<br />
kz<br />
12<br />
<br />
∑ Pn(k)e(nz),<br />
n≥0<br />
where Pn(k) is defined by the relation<br />
j<br />
∏ 1 − q<br />
j≥1<br />
2k = ∑ Pj(k)q<br />
j≥0<br />
j .<br />
Using the expansion 1 − q j2k 2k n<br />
= ∑n≥0 n (−1) q jn , which is valid since<br />
|q| = |e(z)| < 1 for z ∈ H, the first few values <strong>of</strong> Pj(k) can be evaluated to:<br />
P0(k) = 1, P1(k) = −2k, P2(k) = 2k 2 − 3k, P3(k) = − 4<br />
3 k3 + 6k 2 − 8<br />
3 k,<br />
etc. (see a few more at [70, p. 18]). Note that η(z) 24 is the famous Ramanujan<br />
function ∆(z). Cf. [84, pp. 196-197].<br />
The multiplier system<br />
It can be proved (cf. Thm 3.1 and Thm 3.4 [3, p. 48 and p. 52]) that η satisfies<br />
the following functional equations<br />
<br />
−1<br />
η = (−iz)<br />
z<br />
1 2 η (z), and in general,<br />
η(γz) = vη(γ)(cz + d) 1 <br />
2 η(z), ∀γ =<br />
a<br />
c<br />
b<br />
d<br />
∈ SL(2,Z). (2.3)<br />
This functional equation expresses the fact that η is a SL(2,Z)−automorphic<br />
form <strong>of</strong> weight 1<br />
2 and multiplier system given by vη. Accordingly the function<br />
η 2k is an SL(2,Z)-automorphic form <strong>of</strong> weight k and multiplier system given<br />
by v 2k<br />
η , and we can use η 2k in the context <strong>of</strong> Proposition 2.2.1 to assure the<br />
existence <strong>of</strong> the multiplier system, vη,k = v 2k<br />
η , <strong>of</strong> weight k on SL(2,Z) (and<br />
any <strong>of</strong> its subgroups, e.g. Γ0(N)).<br />
We have the following explicit formula for v = v2k η :<br />
1<br />
2πi logv<br />
<br />
kb<br />
a b<br />
=<br />
12 ,<br />
c d k<br />
a = d = 1,c = 0,<br />
a+d−3c<br />
12c − s(d,c) , c > 0,<br />
(2.4)<br />
and <br />
v<br />
−a<br />
−c<br />
−b<br />
−d<br />
= e kπi <br />
v<br />
a<br />
c<br />
b<br />
d<br />
, for c > 0.<br />
58
Here s(d,c) is the Dedekind sum,<br />
s(d,c) =<br />
c−1<br />
∑<br />
n=1<br />
n<br />
c<br />
<br />
dn<br />
,<br />
c<br />
where ((x)) is the saw-tooth function<br />
<br />
x − ⌊x⌋ −<br />
((x)) =<br />
1<br />
2 , if x /∈ Z,<br />
0, if x ∈ Z,<br />
and ⌊x⌋ is the greatest integer less than or equal to x. Note that if x is not<br />
an integer, then ⌊−x⌋ = −⌊x⌋ − 1 so ((−x)) = −((x)), and hence s(−d,c) =<br />
−s(d,c) if gcd(d,c) = 1. One can also express s(d,c) as (cf. [3, p. 61])<br />
s(d,c) = ∑<br />
n mod c<br />
n<br />
c<br />
dn<br />
c<br />
<br />
.<br />
Remark 2.2.1. It is known that, for each k ∈ R, there exist exactly 6 different<br />
multiplier systems <strong>of</strong> weight k on PSL(2,Z) (cf. [84, §3.4, pp. 83, 206 ]<br />
or [63, thm. 19, p. 132]). We will denote these by v (r)<br />
η,k<br />
= v2(k+r) η , where r ∈<br />
{0,2,4,6,8,10}. Compare [84, eq. (6.4.7)]; one knows, <strong>of</strong> course, that v 24<br />
η = 1.<br />
When dealing with the modular group and weight k, it is sufficient to con-<br />
sider only the multiplier system v (0)<br />
later, cf. Section 2.4.5).<br />
2.2.3 The θ Multiplier System<br />
η,k = vη,k = v 2k<br />
η (for reasons to be discussed<br />
On any subgroup <strong>of</strong> PSL(2,Z), we can always use the η-multiplier system, but<br />
in general, if the subgroup has more generators and relations, there are also<br />
other multiplier systems available. In particular, on Γ0(4), there is a multiplier<br />
system <strong>of</strong> weight 1<br />
2 which is interesting from an arithmetical point <strong>of</strong> view.<br />
It is well-known (cf. [90] or [51]) that the Jacobi theta function<br />
θ(z) =<br />
∞<br />
∑<br />
−∞<br />
e(n 2 z), z ∈ H,<br />
is automorphic on Γ0(4) with weight k = 1<br />
2 and can be used to define a multiplier<br />
system on Γ0(4). Using the Poisson summation formula one can prove<br />
(cf. [34, pp. 72–75] or [51, pp. 167–168]) that the θ-function satisfies:<br />
<br />
−1<br />
θ = (−iz)<br />
2z<br />
1 <br />
z<br />
<br />
2 θ , (2.5)<br />
2<br />
59
and one can also prove that (cf. [51, thm. 10.10, p. 177] or [90, p. 447]):<br />
θ(Az) = vθ (cz + d) 1 <br />
2 θ(z), A =<br />
a<br />
c<br />
b<br />
d<br />
∈ Γ0(4), (2.6)<br />
where the multiplier vθ can be expressed explicitly as<br />
<br />
c<br />
<br />
vθ = ¯εd ,<br />
d<br />
where εd = 1 if d ≡ 1 mod 4 and εd = i if d ≡ −1 mod 4, and <br />
c<br />
d denotes the<br />
extended quadratic residue symbol defined as the traditional Jacobi symbol if<br />
0 < d ≡ 1 mod 2 and extended by<br />
<br />
c<br />
<br />
=<br />
d<br />
c<br />
<br />
c<br />
, c = 0,<br />
|c| −d<br />
and<br />
<br />
0 1 if d = ±1,<br />
=<br />
d 0 otherwise.<br />
For the sake <strong>of</strong> completeness we also use the traditional Kronecker extension,<br />
i.e. we define c<br />
2<br />
<br />
=<br />
2<br />
c<br />
<br />
. (2.7)<br />
Observe that since vθ (−I) = e−πik (which follows from the choice <strong>of</strong> argument,<br />
−π < Arg(z) ≤ π), we can always suppose that c > 0 when we evaluate<br />
the symbol <br />
c<br />
d .<br />
One can verify that the symbol <br />
·<br />
· defined as above satisfies reciprocity<br />
relations similar to the usual ones:<br />
Proposition 2.2.2. Suppose that c,d ∈ Z are odd and c = 0. Then we have:<br />
<br />
−1<br />
d<br />
<br />
c<br />
<br />
d<br />
d−1<br />
= (−1)<br />
( 2 )<br />
,<br />
=<br />
<br />
d<br />
c (−1)<br />
( d−1<br />
2 )( c−1<br />
2 )<br />
, d, or c > 0,<br />
− d<br />
c<br />
Worth noting here is that for odd c,d we have<br />
60<br />
d−1<br />
(−1)<br />
( 2 )( c−1<br />
2 )<br />
=<br />
(−1) ( d+1<br />
2 )( c+1<br />
2 ) , d, and c < 0.<br />
<br />
−1, c ≡ d ≡ 3 mod 4,<br />
1, otherwise,
and<br />
d+1<br />
(−1)<br />
( 2 )( c+1<br />
2 )<br />
=<br />
<br />
−1, c ≡ d ≡ 1 mod 4,<br />
1, otherwise.<br />
Remark 2.2.2. Relations (2.5) and (2.6) can also be proved using the corresponding<br />
relations (2.3) for η and the following relation between the η and<br />
the θ functions (cf. [51, p. 177] or [55, thm. 12, p. 46])<br />
<br />
θ(z) = η2 z+1<br />
2<br />
η(z + 1)<br />
. (2.8)<br />
Remark 2.2.3. By (2.8) it is clear that we can define the function θ(z) 2k<br />
uniquely in H for all k ∈ R, and hence we can also define the multiplier system<br />
v 2k<br />
θ <strong>of</strong> weight k on Γ0(4). In this chapter, however, we will consider only half<br />
integral weights for the theta multiplier system.<br />
2.2.4 Further properties <strong>of</strong> the multiplier systems<br />
We are going to consider the eta multiplier system on subgroups <strong>of</strong> the modular<br />
group. It is possible to express the eta multiplier system without involving<br />
a Dedekind sum, i.e. we have the following formula from Knopp [55, p. 51]:<br />
<br />
a b<br />
<br />
c<br />
<br />
1 2<br />
vη<br />
= e (a + d)c − bd c − 1 + 3d − 3 − 3cd<br />
c d d 24<br />
<br />
,<br />
c<br />
d<br />
for c > 0, even. (Note that Knopp’s symbol <br />
c<br />
d<br />
if c = 0).<br />
∗<br />
is equal to our symbol<br />
Remark 2.2.4. Using this formula and the corresponding formula for vθ ([55,<br />
p. 51, thm. 3]) it is easy to see that the eta and theta multipliers coincide on the<br />
principal congruence subgroup Γ(24). Note that [Knopp’s θ](z) =[our θ] <br />
z<br />
2 ,<br />
and that<br />
<br />
<br />
b<br />
a b<br />
a<br />
[Knopp’s vθ ]<br />
= [our vθ ] 2 , when<br />
c d<br />
2c d<br />
<br />
a b<br />
1 0<br />
≡<br />
mod 2.<br />
c d<br />
0 1<br />
Another property <strong>of</strong> the eta multiplier system is that for integral weights it<br />
reduces to a Dirichlet character on certain subgroups.<br />
61
Proposition 2.2.3. The eta multiplier system at weight 1, v2 η, agrees with the<br />
odd Dirichlet character d−1<br />
−1<br />
d = (−1) 2 modulo 4 on the group<br />
<br />
<br />
Γ12 = A ∈ Γ(1)|A ≡<br />
∗<br />
0<br />
0<br />
∗<br />
mod 12 ⊂ Γ0(12)<br />
(and hence it is trivial on Γ(24)).<br />
Pro<strong>of</strong>. Suppose that<br />
A =<br />
<br />
a 12b<br />
12c d<br />
<br />
∈ Γ12.<br />
Then, for c > 0 we have (note that (12,d) = 1)<br />
v 2 η(A) =<br />
<br />
1 2<br />
e (a + d)12c − 12bd 144c − 1 + 3d − 3 − 36cd<br />
12<br />
<br />
=<br />
<br />
1<br />
d − 1<br />
e [3d − 3] = e = i<br />
12 4<br />
d−1 = (−1) d−1<br />
=<br />
2<br />
<br />
−1<br />
.<br />
d<br />
If c = 0 we use (2.4) and see that if a = d = 1 then<br />
and if a = d = −1 then<br />
Hence, in all cases, if c ≥ 0 we have<br />
2.3 <strong>Maass</strong> Waveforms<br />
v 2 η(A) = 1,<br />
v 2 η(A) = −1.<br />
v 2 η(A) =<br />
<br />
−1<br />
.<br />
d<br />
The slash-operator f |A(z) = f (Az) can be extended to an operator <strong>of</strong> weight k<br />
as:<br />
f |[A,k](z) = f (Az) jA(z;k) −1 ,<br />
62
and the natural analog <strong>of</strong> the Laplace-Beltrami operator, ∆, which is invariant<br />
under this action is the weight-k Laplacian:<br />
∆k = ∆ − iyk ∂<br />
<br />
∂ 2 ∂ 2<br />
= y2 +<br />
∂x ∂x2 ∂y2 <br />
− iyk ∂<br />
∂x .<br />
If Γ is a Fuchsian group we define the space M(Γ,v,k,λ) consisting <strong>of</strong> <strong>Maass</strong><br />
<strong>waveforms</strong> on Γ, <strong>of</strong> weight k, multiplier system v and eigenvalue λ, as the<br />
space <strong>of</strong> functions which satisfy the following conditions:<br />
1) f |[A,k](z) = v(A) f (z), ∀A =<br />
2) ∆k f + λ f = 0, and<br />
3)<br />
<br />
F | f |2 dµ < ∞.<br />
Observe that condition 1) is equivalent to<br />
1’) f (Az) = v(A) jA(z;k) f (z), ∀A =<br />
<br />
a b<br />
c d<br />
<br />
<br />
a b<br />
c d<br />
∈ Γ,<br />
<br />
∈ Γ.<br />
For purposes <strong>of</strong> the computational work to be described in this chapter, we<br />
shall be content to restrict ourselves to cases where λ > 1<br />
4 . (Cf. also here para.<br />
4 <strong>of</strong> sect. 2.9.1 below.)<br />
Instead <strong>of</strong> the Bessel equation in the case <strong>of</strong> weight 0, condition 2) above<br />
gives us the Whittaker equation, and using the method <strong>of</strong> separation <strong>of</strong> variables<br />
gives us Whittaker functions instead <strong>of</strong> the K-Bessel functions at weight<br />
0 (for complete details see [39, chap. 9]). Since f (x+iy) is no longer periodic<br />
in x, but instead satisfies f (z + 1) = v(S) f (z) = e(α) f (z), with α ∈ [0,1), the<br />
Fourier series <strong>of</strong> f can ([39, pp. 26, 348, 420(19)]) be written as<br />
f (z) =<br />
∞<br />
∑<br />
−∞<br />
n+α=0<br />
c(n)<br />
W k sgn(n+α)<br />
|n + α| 2 ,iR (4π|n + α|y)e((n + α)x), (2.9)<br />
where Wl,µ(x) is the Whittaker function in standard notation (cf. [29, vol. I, p.<br />
264]) and R is the usual spectral parameter, λ = 1<br />
4 + R2 . One notes here that<br />
Wl,µ(x) = e− x 2 x (µ+ 1 <br />
2) 1<br />
x<br />
Ψ µ + .<br />
2 − l;2µ + 1;x and that W0,µ(x) = π− 1 2 x 1 2 Kµ 2<br />
For k = 0, the expansion above thus reduces to usual Fourier expansion with<br />
2y 1 2 KiR(2π|n + α|y) as in [39, p. 26, prop. 4.12].<br />
As in the case <strong>of</strong> trivial multiplier, we define functions f j related to f at<br />
each cusp, p j, <strong>of</strong> Γ by f j(z) = f |[σ j,k](z) = jσ j (z;k)−1 f (σ jz). Here σ j is the<br />
63
cusp normalizing map <strong>of</strong> the cusp p j (cf. Chapter 1, Definition 1.1.4), and<br />
using σ jSσ −1<br />
j = S j together with (2.2) it easy to see that<br />
f j(z + 1) = v(S j) f j(z) = e(α j) f j(z),<br />
with α j ∈ [0,1) (cf. [51, p. 41]). Thus the Fourier series <strong>of</strong> f at the cusp j can<br />
be written as<br />
c j(n)<br />
f j(z) = <br />
|n + α j| Wsgn(n+α j) k 2 ,iR(4π|n + α j|y)e((n + α j)x). (2.10)<br />
∞<br />
∑<br />
n=−∞<br />
As in the case <strong>of</strong> weight 0 and Dirichlet character, we say that the cusp number<br />
j is open or singular if α j = 0 and closed if α j = 0. If all cusps <strong>of</strong> Γ are singular<br />
for the multiplier system v we say that v is a singular multiplier system for Γ.<br />
Remark 2.3.1. Observe that, for the eta-multiplier and weight k, we have<br />
α = α1 = k<br />
12 .<br />
2.3.1 Decomposition <strong>of</strong> the discrete spectrum<br />
It is known (see for example [18] or [39]) that closed cusps (i.e. v(S j) = 1)<br />
do not contribute to the continuous spectrum, and if all cusps are closed there<br />
is only the discrete part <strong>of</strong> the spectrum left and this is spanned by the <strong>Maass</strong><br />
<strong>waveforms</strong>. We also know (see [39, p. 385]) that on the modular group with<br />
weight k the least eigenvalue is<br />
λmin = |k|<br />
2<br />
<br />
1 − |k|<br />
<br />
,<br />
2<br />
or larger. In the case <strong>of</strong> PSL(2,Z) and k ≥ 0, F(z) = y k 2 η(z) 2k has eigenvalue<br />
equal to λmin.<br />
In this chapter, any eigenvalues λ ∈ λmin, 1<br />
<br />
4 will be regarded as exceptional.<br />
The non-exceptional eigenvalues thus satisfy 1<br />
4 < λ0 ≤ λ1 ≤ ··· ≤<br />
λn → ∞. One can obtain lower bounds for the eigenvalue λ0 (see [18, p. 183]),<br />
but in light <strong>of</strong> the numerical experiments in Section 2.9.1 they are not very<br />
effective (cf. Figure 2.2).<br />
64
2.4 Operators<br />
2.4.1 Conjugation and reflection<br />
Let J and K denote the conjugation, Kz = z, and reflection, Jz = −z. Then J<br />
and K act as involutions on the space <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong> via the operations<br />
K f = f |K(z) = f (z).<br />
J f = f |J(z) = f (−z).<br />
The action <strong>of</strong> GL(2,R) on H is defined as follows; for g = <br />
a b<br />
c d and z ∈ H<br />
we define<br />
⎧<br />
az+b<br />
⎪⎨ cz+d , if ad − bc > 0,<br />
g(z) =<br />
⎪⎩ az+b<br />
cz+d , if ad − bc < 0,<br />
then as usual we can use the following matrix in GL(2,R) to represent the<br />
operator J :<br />
For T = <br />
a b<br />
c d we define<br />
J =<br />
<br />
T ∗ = JT J −1 =<br />
1 0<br />
0 −1<br />
<br />
<br />
.<br />
a −b<br />
−c d<br />
and then T ∗∗ = T, and T (z) |K = −T ∗ (z), meaning that also −T z = T ∗ (−¯z).<br />
Remark 2.4.1. It is easy to verify that if f ∈ M(Γ0(N),v,k,λ), then the conjugate<br />
K f ∈ M(Γ0(N),v,−k,λ) and J f ∈ M(Γ0(N),v ∗ ,−k,λ), where v∗ is the<br />
multiplier system determined by<br />
v ∗ (T ) = v(T ∗ <br />
) ·<br />
1,<br />
e<br />
c = 0,<br />
πik(1−sgn(d)) <br />
,<br />
, forT =<br />
c = 0,<br />
a<br />
c<br />
b<br />
d<br />
.<br />
Here we used the fact that for c = 0<br />
jT ∗(Jz;k) = eikArg(−c(−¯z)+d) = e ikArg(c¯z+d) = e −ikArg(cz+d) = jT (z;k) −1 ,<br />
while for c = 0 we have<br />
jT ∗ (Jz;k) = eikArg(d) =<br />
<br />
<br />
1 = jT (z;k) −1 , d > 0,<br />
e ikπ = e 2πik jT (z;k) −1 , d < 0.<br />
,<br />
65
What we want to study here is the involution obtained by combining J and<br />
K, i.e.<br />
KJ f (z) = f |JK(z) = f (−¯z).<br />
It is easily seen that if f has Fourier coefficients c j(n), then (by [29, p. 265(8)])<br />
f |JK has Fourier coefficients c j(n), and we thus would like to have f and f |JK<br />
belonging to the same space (i.e. transform according to the same multiplier<br />
system), since then we can assume that the Fourier coefficients are real.<br />
It is clear that if f ∈ M(Γ0(N),v,k,λ), then KJ f ∈ M(Γ0(N),v ∗ ,k,λ) so we<br />
are left to see whether v ∗ = v or not. We consider the two multiplier systems<br />
separately.<br />
Eta multiplier<br />
Suppose that v = vη, T = <br />
a b<br />
c d , and without loss <strong>of</strong> generality we assume<br />
c ≥ 0. We consider the case c > 0 first:<br />
1<br />
2πi lnv(T ∗ ) = 1<br />
2πi lnv<br />
<br />
a<br />
−c<br />
−b<br />
d<br />
= k 1<br />
+<br />
2 2πi lnv<br />
<br />
=<br />
−a b<br />
c −d<br />
k<br />
=<br />
=<br />
<br />
−a − d − 3c<br />
+ k<br />
− s(−d,c)<br />
2 12c<br />
<br />
−a − d + 3c<br />
k<br />
− s(−d,c)<br />
12c<br />
<br />
a + d − 3c<br />
−k<br />
− s(d,c)<br />
12c<br />
= − 1<br />
lnv(T ),<br />
2πi<br />
so v(T ∗ ) = v(T ), and hence v ∗ (T ) = v J (T ) = v(T ). Now, if c = 0, and d > 0<br />
we have<br />
66<br />
v(T ∗ <br />
) =<br />
=<br />
1 −b<br />
v<br />
0 1<br />
<br />
−kb<br />
e<br />
24<br />
= v(T ),
and if c = 0, d < 0, then<br />
v(T ∗ <br />
) =<br />
=<br />
=<br />
−1 −b<br />
v<br />
0 −1<br />
<br />
k 1<br />
e v<br />
2 0<br />
<br />
k kb<br />
e + ,<br />
2 24<br />
<br />
b<br />
1<br />
and<br />
hence v(T ∗ ) = e(−k)v(T ), and thus<br />
Theta multiplier<br />
<br />
v(T ) =<br />
=<br />
=<br />
−1 b<br />
v<br />
0 −1<br />
<br />
k 1<br />
e v<br />
2 0<br />
<br />
k kb<br />
e − ,<br />
2 24<br />
<br />
−b<br />
1<br />
v ∗ (T ) = v(T ∗ )e(k) = v(T ).<br />
In the case <strong>of</strong> the θ-multiplier we have, for c > 0 or c = 0 and d > 0 :<br />
<br />
a −b<br />
vθ,k (T ∗ ) = vθ<br />
= εd 2k<br />
= εd 2k<br />
=<br />
−c d<br />
2k −c<br />
d<br />
2k −1<br />
<br />
c<br />
2k d d<br />
2k , ifd ≡ 1 mod 4,<br />
i2k <br />
c 2k<br />
d , if d ≡ 3 mod 4,<br />
c<br />
d<br />
= vθ (T ),<br />
67
and in the case c = 0, d < 0 we have<br />
<br />
−1 b<br />
and<br />
vθ (T ∗ ) = vθ<br />
0 −1<br />
= ε−1 2k<br />
2k 0<br />
−1<br />
= (−i) 2k<br />
= vθ (T ),<br />
<br />
v ∗ (T ) = vθ (T ∗ )e 2kπi = i 2k (−1) 2k = (−i) 2k = vθ (T ),<br />
hence in all cases, v ∗ θ (T ) = vθ (T ), and we conclude this section with the following<br />
proposition.<br />
Proposition 2.4.1. If v is either the η- or the θ-multiplier system (in the latter<br />
case 4|N) then a basis { f1,..., fm} <strong>of</strong> M(Γ0(N),v,k,λ) can be chosen so that<br />
each f j can be expanded in a Fourier series at ∞ with real coefficients.<br />
Pro<strong>of</strong>. We have seen that for both the theta and the eta multiplier systems the<br />
product KJ is a conjugate-linear involution <strong>of</strong> the space M(Γ0(N),v,k,λ), and<br />
hence we can assume that any f ∈ M(Γ0(N),v,k,λ) is an eigenfunction <strong>of</strong><br />
KJ with eigenvalue ε, where |ε| = 1. Note that if f (z) has a Fourier series<br />
expansion as above, then<br />
f |J|K(z) = f (−¯z)<br />
= ∑<br />
n+α=0<br />
c(n)<br />
W k<br />
|n + α| 2 sgn(n+α),ν (4π|n + α|)e(x(n + α))<br />
hence c(n) = εc(n). Finally we observe that if ε = e iθ we can look at the function<br />
g = e i θ 2 f which then satisfies KJg = e −i θ 2 KJ f = e −i θ 2 e iθ f = g, hence we<br />
can (after proper normalization) assume that the eigenvalue <strong>of</strong> KJ is ε = 1, and<br />
that the Fourier coefficients are real.<br />
Remark 2.4.2. For the sake <strong>of</strong> completeness it should be remarked that in general<br />
one can not simultaneously take Fourier coefficients at cusps other than ∞<br />
to be real (cf. Subsection 2.4.3 and the map ωN, which is a cusp normalizing<br />
map for the cusp at 0 and which has eigenvalues ±i −2k ).<br />
2.4.2 The involution ωN<br />
As usual we define ωNz = −1<br />
Nz , or equivalently ωN =<br />
−1 <br />
0 √N<br />
√ . We know that<br />
N 0<br />
ωN is an involution <strong>of</strong> Γ0(N), i.e. Γ0(N) = ωNΓ0(N)ω −1<br />
n , but the question is<br />
68
how it relates to the weight and multiplier system.<br />
If f ∈ M(Γ0(N),v,k,λ) it is easy to see that f |[k,ωN] ∈ M(Γ0(N),v ωN ,k,λ),<br />
and that vωN <br />
(T ) = v ωNT ω −1<br />
<br />
N . We also have<br />
f |[k,ωN]|[k,ωN](z) = jωN (z;k)−1 f (ωNz) |[k,ωN]<br />
= jωN (z;k)−1 jωN (ωNz;k) −1 f ω 2 Nz <br />
= e −ikArg(√ Nz) e −ikArg(−1/ √ Nz) f (z)<br />
= e −iπk f (z),<br />
and hence if we define the operator τN by<br />
we have that<br />
τN f (z) = e ik π 2 f |[k,ωN](z),<br />
τ 2 N = Id.<br />
To prove that τN is a linear involution, what is left to verify is that v ωN = v,<br />
which we can do in the following two cases:<br />
a) If N = 4, and v = vθ , using θ <br />
−1<br />
1<br />
2z = (−iz) 2 θ <br />
z<br />
2 one can prove<br />
that vω4(A) = v(A).<br />
b) If N = 1, and v = vη, by evaluating v ω1 on the generators <strong>of</strong> Γ0(1),<br />
S = ω1, and T, it is immediate that v ω1<br />
η = vη.<br />
And we conclude:<br />
Proposition 2.4.2. If N = 1 and v = vη, or N = 4 and v = vθ the operator<br />
defined by<br />
τN : M(Γ0(N),v,k,λ) → M(Γ0(N),v,k,λ),<br />
τN f (z) = e ik π 2 f |[k,ωN] = e −ik(Argz− π 2 ) f<br />
is a linear involution, i.e. τ2 N f = f .<br />
<br />
−1<br />
,<br />
Nz<br />
This means that the operator τN is a linear involution <strong>of</strong> M(Γ0(N),v,k,λ),<br />
and hence has eigenvalues ±1. Note that in the case N = 4, if τN f (z) = ± f (z),<br />
then<br />
f2 = f |ωN = e−ik π 2 τN f = ±e −ik π 2 f ,<br />
which in turn means that the Fourier coefficients at the cusp at 0 satisfy<br />
c2(n) = ±e −i π 2 k c1(n) = ±(i) −k c1(n). (2.11)<br />
69
2.4.3 The operator σ4<br />
For N = 4 and θ-multiplier system we define the operator σ4, by<br />
<br />
z + j<br />
.<br />
σ4 f (z) = ∑<br />
j mod 4<br />
f<br />
This can be viewed as a “partial” Hecke operator on Γ0(4). (cf. [53, p.<br />
195, (0.8)] and [56, p. 250]). We have to verify that σ4 is an operator on<br />
M(Γ0(4),vθ ,k,λ). Suppose that A = <br />
a b<br />
4c d ∈ Γ0(4), and with the notation<br />
Vj = <br />
1 j<br />
, we get<br />
0 4<br />
(σ4 f ) |[A,k](z) = jA(z;k) −1 ∑<br />
j mod N<br />
f (VjAz)<br />
Here we used<br />
jB(Vlz;k) = exp<br />
= jA(z;k) −1 ∑<br />
l mod N<br />
f<br />
<br />
4<br />
∗ ∗<br />
16c d − 4lc<br />
<br />
Vlz<br />
{l is uniquely defined mod 4 by al ≡ b + jd mod 4}<br />
= jA(z;k) −1 ∑ ε<br />
l mod N<br />
2k<br />
2k 16c<br />
d<br />
vθ (B) jB(Vlz;k) f (Vlz)<br />
d − 4lc<br />
= ε2k <br />
16c<br />
d ∑<br />
f (Vlz).<br />
d − 4lc<br />
= jA(z;k).<br />
l mod N<br />
<br />
ikArg 16c<br />
z + l<br />
4<br />
<br />
<br />
+ d − 4lc = exp[ikArg(4cz + d)]<br />
Hence, what is left is to check that <br />
16c c c<br />
d−4lc = d−4lc = d .<br />
The sign <strong>of</strong> Nc is the same as the sign <strong>of</strong> N2c and we might assume without<br />
loss <strong>of</strong> generality that c > 0. By virtue <strong>of</strong> (2.7) we may also assume that c is<br />
odd since we can always pull out a factor <strong>of</strong> 2 at the beginning. For the reciprocity<br />
relations applicable to our quadratic residue symbol, see Proposition<br />
2.2.2:<br />
70<br />
<br />
c<br />
d − 4lc<br />
<br />
=<br />
=<br />
=<br />
<br />
d − 4lc<br />
c−1<br />
(−1) ( 2 )(<br />
c<br />
d−4lc−1<br />
2 )<br />
<br />
d<br />
c−1<br />
(−1) ( 2 )(<br />
c<br />
d−1<br />
<br />
2 )−l(c−1)c d<br />
c−1<br />
= (−1) ( 2 )(<br />
c<br />
d−1<br />
2 )<br />
<br />
c<br />
<br />
,<br />
d
(note that c(c − 1) is even). We have shown that<br />
(σ4 f ) |[A,k](z) = ε 2k<br />
d<br />
<br />
c<br />
2k d<br />
∑<br />
l mod N<br />
and thus σ4 : M(Γ0(4),vθ ,k,λ) → M(Γ0(4),vθ ,k,λ).<br />
f (Vlz) = vθ,k(A)σ4 f (z),<br />
Remark 2.4.3. Following Kohnen [56] or Katok-Sarnak [53] we define the<br />
operator L acting on M(Γ0(4),vθ , 1<br />
2 ,λ) by<br />
L = τ4σ4.<br />
It can be shown that this operator is self-adjoint, commutes with ∆ 1 and have<br />
2<br />
the eigenvalues 1 and 1<br />
2 .<br />
2.4.4 <strong>Maass</strong> operators<br />
So far, the operators we have seen act on spaces <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong> <strong>of</strong> a<br />
given weight and multiplier system.<br />
We will show that we may limit the range <strong>of</strong> weights k to investigate to k ∈<br />
[0,6]. For this we will use the <strong>Maass</strong> lowering and raising operators, E ± k ,which<br />
raise or lower the weight <strong>of</strong> a <strong>Maass</strong> waveform by units <strong>of</strong> 2. They are defined<br />
by<br />
E ± k<br />
∂ ∂ k<br />
= iy ± y +<br />
∂x ∂y 2 ,<br />
and using the relation between the Whittaker function and the confluent hypergeometric<br />
function together with the transformation formulas [29, p. 258,<br />
(10)] (see also: [63, p. 183 (middle)] and [64, p. 302 lines -3 and -1]) we see<br />
that for k > 0 (use the abbreviation 4π|n + α|y = Y )<br />
<br />
<br />
(Y )e((n + α)x) = −Wk+2<br />
E + k<br />
E − k<br />
E + k<br />
E − k<br />
W k 2 ,iR<br />
<br />
W k − 2 ,iR (Y )e((n + α)x)<br />
<br />
=<br />
2<br />
<br />
k(k + 2)<br />
4<br />
,iR (Y )e((n + α)x) if n + α > 0,<br />
+ 1<br />
<br />
+ R2<br />
4<br />
W k+2 − 2 ,iR (Y )e((n + α)x)<br />
<br />
<br />
if n + α < 0,<br />
W k − 2 ,iR (Y )e((n + α)x) =W k−2 − 2 ,iR (Y )e((n + α)x)<br />
<br />
<br />
k(k − 2)<br />
W k<br />
2 ,iR (Y )e((n + α)x) = − +<br />
4<br />
if n + α < 0, and<br />
1<br />
<br />
+ R2<br />
4<br />
ifn + α > 0.<br />
Wk−2<br />
2 ,iR (Y )e((n + α)x)<br />
To verify that they respect the weight k-action we rewrite them in the follow-<br />
71
ing form<br />
E + k<br />
E − k<br />
and also use the formulation:<br />
∂ k<br />
= (z − z) +<br />
∂z 2 ,<br />
∂ k<br />
= −(z − z) +<br />
∂z 2 ,<br />
e −iArg(cz+d) =<br />
1<br />
cz + d 2<br />
.<br />
cz + d<br />
It is then easy to see (cf. [63, p. 178]) that<br />
E + <br />
k<br />
f|[k,A](z) <br />
= (z − z) ∂<br />
<br />
k<br />
+<br />
∂z 2<br />
k <br />
cz + d 2<br />
f (Az)<br />
cz + d<br />
k+2<br />
−k cz + d 2 c<br />
=(z − z)<br />
f (Az)<br />
2 cz + d (cz + d)<br />
k<br />
cz + d 2 1<br />
+<br />
cz + d (cz + d) 2 f ′ <br />
(Az) + k<br />
k<br />
cz + d 2<br />
f (Az)<br />
2 cz + d<br />
k <br />
cz + d 2 k c(z − z)<br />
(z − z)<br />
=<br />
1 − f (Az) +<br />
cz + d 2 (cz + d)<br />
k+2<br />
cz + d 2<br />
=<br />
cz + d<br />
(z − z)<br />
|cz + d| 2 f ′ (Az) + k<br />
<br />
f (Az)<br />
2<br />
k+2<br />
cz + d 2<br />
=<br />
cz + d<br />
<br />
′ k<br />
Az − Az f (Az) + f (Az)<br />
2<br />
= E + <br />
k f |[k+2,A] .<br />
(cz + d) 2 f ′ (Az)<br />
It is known that E ± k maps M(Γ0(N),v,k,λ) into M(Γ0(N),v,k±2,λ), and that<br />
the composition<br />
E ∓ k±2 E± k : M(Γ0(N),v,k,λ) ↦→ M(Γ0(N),v,k,λ)<br />
is just multiplication by a constant, which is readily seen to be nonzero anytime<br />
λ > 1<br />
4 . Hence E± k acts bijectively on the spaces corresponding to nonexceptional<br />
eigenvalues, i.e. they are always bijections for λ > 1<br />
4 .<br />
2.4.5 <strong>Maass</strong> operators and the symmetry about k = 6<br />
First <strong>of</strong> all, observe that E ± k<br />
only change the weight and not the multiplier<br />
system v, but in view <strong>of</strong> the remark after Def. 2.2.2 it is clear that v = v 2k<br />
η is<br />
72
also a multiplier system <strong>of</strong> weight k + r for any r ∈ 2Z, and with the notation<br />
it is clear that<br />
v (r)<br />
η,k<br />
and<br />
= v2(k+r)<br />
η<br />
E + k<br />
E − k<br />
(r)<br />
(r−2)<br />
: M(Γ0(N),v η,k ,k,λ) → M(Γ0(N),v η,k+2 ,k + 2,λ),<br />
(r)<br />
(r+2)<br />
: M(Γ0(N),v η,k ,k,λ) → M(Γ0(N),v η,k−2 ,k − 2,λ).<br />
Our main purpose is to investigate the locations <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong> on<br />
the modular group when the weight and multiplier system are varied. That<br />
is, we would like to investigate the space M(Γ0(1),v (r)<br />
η,k ,k,λ) for all k ∈ R<br />
and r ∈ {0,2,4,6,8,10}. To reduce the problems we use the fact that v (r)<br />
η,k are<br />
all 24th-roots <strong>of</strong> unity. Suppose that λ > 1<br />
4 so the the lowering and raising<br />
operators act bijectively, then using the notation (k,v (r)<br />
η,k ) to denote that space<br />
M(Γ0(1),v (r)<br />
η,k ,k,λ) we have:<br />
• A composition <strong>of</strong> <strong>Maass</strong> operators which raises or lowers the weight by 12<br />
will preserve the multiplier system. Hence it is no restriction to assume<br />
that k ∈ [0,12].<br />
• Conjugation maps f ∈ (k,v (r)<br />
η,k ) to K f ∈ (−k,v(−r) η,−k ) = (−k,v(12−r)<br />
η,−k ), which<br />
can in turn be mapped to a function g ∈ (12 − k,v (12−r)<br />
η,12−k ) by raising operators,<br />
so there is no restriction to assume k ∈ [0,6] and r ∈ {0,2,4,6,8,10}.<br />
• But by using the raising operator repeatedly we can map v (0)<br />
η,k to any v(r)<br />
η,k<br />
and hence it is no restriction to also assume r = 0.<br />
We are thus justified in our choice <strong>of</strong> restricting the investigation to the spaces<br />
M(Γ0(1),v,k,λ) for k ∈ [0,6] and v = v (0)<br />
η,k<br />
2.4.6 Hecke operators<br />
= v2k<br />
η .<br />
We know that Hecke operators play an important role in the understanding <strong>of</strong><br />
the theory <strong>of</strong> both modular forms and <strong>Maass</strong> <strong>waveforms</strong> at integer weights.<br />
For general real weights, the Hecke operators are not important, but we will<br />
begin with the general definition anyway, and then we will consider the case<br />
<strong>of</strong> weight 1<br />
2<br />
and the theta multiplier system, where the action <strong>of</strong> the Hecke<br />
operators T p 2 are well understood.<br />
This discussion is based on [93], and see also [103].<br />
Let Γ ⊂ PSL(2,R) be c<strong>of</strong>inite and suppose v : Γ→ S 1 is a multiplier system<br />
<strong>of</strong> weight k ∈ R. The commensurator <strong>of</strong> Γ, comm(Γ), in PSL(2,R) is defined<br />
as<br />
comm(Γ) = α ∈ PSL(2,R)|αΓα −1 ∩ Γ has finite index in Γ and αΓα −1 .<br />
73
We know that the Hecke operators are associated with the members <strong>of</strong> the<br />
commensurator, or actually with the double cosets, ΓαΓ, for α ∈ comm(Γ).<br />
Fix α ∈ comm(Γ). It can be shown that if the multiplier system v satisfies<br />
v(g) = v α (g), ∀g ∈ Γ ∩ α −1 Γα, (2.12)<br />
then we can define an associated multiplier system, vα, on the double coset:<br />
by setting<br />
vα : ΓαΓ → S 1 ,<br />
vα (g1αg2) = σk (g1α,g2)σk (g1,α)v(g1)v(g2),<br />
for all g1,g2 ∈ Γ. It might be the case that there exists an associated multiplier<br />
system <strong>of</strong> the multiplier system W = χv, where χ is a character on ΓαΓ, even<br />
though there does not exist an associated multiplier system <strong>of</strong> v itself. Suppose<br />
that vα exists as above, and that ΓαΓ = ∪ d i=1 Γαi. We then define the Hecke<br />
operator T v α,k : M Γ,v,k,λ → M Γ,v,k,λ by<br />
T v α,k f (z) =<br />
=<br />
d<br />
∑ vα (αi) f |[αi,k](z)<br />
i=1<br />
d<br />
∑ vα (αi) jαi<br />
i=1<br />
(z;k)−1 f (αiz).<br />
When Γ is a congruence subgroup, one usually constructs Hecke operators<br />
corresponding to positive integers n, in which case α = <br />
1 0<br />
0 n and αi = <br />
a b<br />
0 d<br />
with ad = n, d > 0, b mod d. The Hecke operator T v<br />
n,k is then defined by<br />
T v<br />
n,k f (z) = n k 2 −1 <br />
d−1<br />
<br />
a b az + b<br />
∑ ∑ vα<br />
f .<br />
0 d d<br />
ad=n b=0<br />
The Theta multiplier<br />
Consider the case Γ = Γ0(4), k = 1<br />
2 and v = vθ . Let n be a positive integer and<br />
α = <br />
1 0<br />
0 n . Then g ∈ Γ0(4) ∩ α−1 <br />
a nb<br />
Γ0 (4)α can be written g = c/n d , and<br />
αgα−1 = <br />
a b , with ad − bc = 1 and c ≡ 0 mod 4n. It is easy to verify that<br />
c d<br />
vα (g) = v(αgα−1 ), and<br />
c<br />
n<br />
v(g) = εd<br />
d<br />
<br />
= εd<br />
c<br />
d<br />
<br />
n<br />
−1 = v(αgα<br />
d<br />
−1 )<br />
<br />
n<br />
−1 ,<br />
d<br />
and hence vα (g) = v(g) if and only if <br />
n<br />
d = 1. Since (2.12) implies this condition<br />
for all odd integers d it is clear that the extension vα exists if and only<br />
if n is a perfect square.<br />
74
Suppose now for simplicity that n = p2 , with p a prime number = 2. It<br />
is easy to verify that in this case the associated multiplier system is given<br />
by vα (g1αg2) = vα (g1)vα (g2), and the different coset representatives are<br />
1 b<br />
given by 0 p2 <br />
,b = 0,..., p2 <br />
− 1, p2 0<br />
p b<br />
, and<br />
0 1<br />
0 p , b = 0,..., p − 1. By<br />
factorization <strong>of</strong> these representatives we see that<br />
<br />
p<br />
vα<br />
2 <br />
b<br />
1 0<br />
= vα<br />
0 1<br />
0 p2 <br />
1 b<br />
= 1,<br />
0 1<br />
<br />
p2 <br />
0<br />
p2 <br />
−t 1 0 p2 <br />
d t<br />
vα<br />
vα<br />
<br />
and hence<br />
0 1<br />
= vα<br />
4 d 0 p2 −4 1<br />
= p 2 d + 4t = 1 <br />
p<br />
= v<br />
2 <br />
−t<br />
4 d<br />
= εd = 1,<br />
<br />
p b<br />
0 p<br />
= vα<br />
T vθ<br />
p2 , 1 f (z)<br />
2<br />
= p − 3 =<br />
d−1<br />
2 ∑ ∑ vα<br />
ad=p2 b=0<br />
p − 3 <br />
p2−1 2 ∑ vα<br />
b=0<br />
vα<br />
= p − 3 2<br />
= p − 3 2<br />
1 0<br />
4xp 1<br />
<br />
1 0<br />
0 p 2<br />
<br />
p b<br />
−4x D<br />
= {pD + 4bx = 1}<br />
<br />
p b<br />
−4x<br />
= v<br />
= εD<br />
−4x D<br />
D<br />
<br />
−4x −4x −4x<br />
= εp<br />
= εp<br />
pD p<br />
p<br />
<br />
4xb −b −b b<br />
= εp<br />
= εp = εp ,<br />
p p p p<br />
<br />
<br />
a b az + b<br />
f<br />
0 d d<br />
1 b<br />
0 p2 <br />
z + b<br />
f<br />
p2 <br />
+<br />
<br />
p2 <br />
0<br />
f<br />
0 1<br />
p 2 z <br />
p−1<br />
<br />
p b<br />
+ ∑ vα<br />
f z +<br />
b=0 0 p<br />
b<br />
<br />
p<br />
<br />
<br />
p2−1 <br />
z + b<br />
∑ f<br />
b=0 p2 <br />
+ f p 2 z p−1 <br />
b<br />
+ ∑ εp f z +<br />
b=0 p<br />
b<br />
<br />
p<br />
<br />
<br />
z + b<br />
f<br />
p2 <br />
+ f p 2 z p−1<br />
<br />
b<br />
+ εp ∑ f z +<br />
p<br />
b<br />
<br />
p<br />
<br />
.<br />
p 2 −1<br />
∑<br />
b=0<br />
b=0<br />
75
This agrees with the corresponding results in [90, pp. 450–451]. To see that<br />
the operator obtained is the same as in [53] (up to a constant multiple) we look<br />
at the action on the Fourier coefficients a(n) <strong>of</strong> f ∈ M Γ0(4),vθ , 1<br />
2 ,λ , i.e.<br />
with the abbreviation W(x) = W1<br />
4 sgn(x),iR (4π|x|), and<br />
we have<br />
and note that<br />
and<br />
T vθ<br />
p2 , 1 f (z) = p<br />
2<br />
− 3 2<br />
p−1<br />
∑<br />
b=0<br />
<br />
b<br />
e<br />
p<br />
f (z) = ∑ n=0<br />
+ ∑ n=0<br />
+ εp<br />
= p − 3 2<br />
+ ∑ n=0<br />
+ ∑ n=0<br />
p 2 −1<br />
∑<br />
b=0<br />
a(n)<br />
W(ny)e(nx),<br />
|n|<br />
∑<br />
n=0<br />
<br />
a(n) ny<br />
W<br />
|n| p2 <br />
n(x + b)<br />
e<br />
p2 <br />
a(n)<br />
W(np<br />
|n| 2 y)e(np 2 x)<br />
p−1<br />
∑<br />
b=0<br />
p2−1 ∑ e<br />
b=0<br />
<br />
nb<br />
p<br />
(cf. [61, IV, §3]) which gives us 1<br />
<br />
<br />
b a(n)<br />
p ∑ W(ny)e nx +<br />
n=0 |n| nb<br />
<br />
p<br />
<br />
<br />
a(n)<br />
∑ W<br />
n=0 |n|<br />
<br />
ny<br />
p2 <br />
e<br />
a(n)<br />
W(np<br />
|n| 2 y)e(np 2 x)<br />
a(n)<br />
W(ny)e(nx)εp<br />
|n|<br />
<br />
nx<br />
p2 p2−1 p−1<br />
∑<br />
b=0<br />
<br />
nb<br />
p2 <br />
p<br />
=<br />
2 , p2 |n,<br />
0, p2 ∤ n,<br />
∑ e<br />
b=0<br />
<br />
b<br />
e<br />
p<br />
<br />
nb<br />
p2 <br />
<br />
nb<br />
p<br />
<br />
,<br />
p−1<br />
<br />
n nb nb<br />
=<br />
p ∑ e<br />
b=0 p p<br />
= √ <br />
n<br />
p<br />
p<br />
<br />
1, p ≡ 1 mod 4,<br />
i, p ≡ −1 mod 4,<br />
= √ <br />
n<br />
p εp,<br />
p<br />
1 For p = 2, we use a definition analogous to [90, p. 450] and derive an expansion analogous to<br />
[90, thm. 1.7].<br />
76
T vθ<br />
p2 , 1 f (z) =<br />
2<br />
1<br />
√<br />
p ∑<br />
n=0<br />
1<br />
<br />
|n|<br />
<br />
a(p 2 <br />
n<br />
n) + a<br />
p2 <br />
+ p − 1 2<br />
<br />
n<br />
a(n) W(ny)e(nx).<br />
p<br />
It is easy to see that our Hecke operator T vθ<br />
p2 , 1 =<br />
2<br />
1 √<br />
pTp2, where Tp2 is the corresponding<br />
Hecke operator defined in [53, p. 199]. Observe that our Fourier<br />
coefficients a(n) = √ n×Katok-Sarnak’s Fourier coefficients b(n).<br />
As usual, we can look at Hecke eigenforms in M Γ0(4),vθ , 1<br />
2 ,λ , and one<br />
can prove (cf. [90, p. 453]) that if f = ∑ a(n)<br />
√ W(ny)e(nx) is an eigenfunction<br />
n<br />
<strong>of</strong> T vθ<br />
p2 , 1 for all primes p and if t is square free, then<br />
2<br />
a(tm 2 )a(tn 2 ) = a(t)a(tm 2 n 2 ), for(m,n) = 1.<br />
2.4.7 Lifts at weight 1 and Fourier coefficients<br />
As a general rule, in cases with nontrivial multiplier system, it is hard to see<br />
precisely which Hecke operators (if any) are present and what the corresponding<br />
multiplicative relations are. In this section we discuss a simple reduction<br />
trick which allows one to get some multiplicative relations in a case where<br />
k = 1 and α = 0 (cf. (2.9)).<br />
To this end, consider any <strong>Maass</strong> <strong>waveforms</strong> f ∈ M(Γ0(1),v2 η,1,λ). This<br />
implies that, for ad − 144bc = 1, we have (see Prop. 2.2.3)<br />
f (Az) = jA(z;1)v 2 <br />
−1<br />
η (A) f (z) = jA(z;1) f (z),<br />
d<br />
where A = <br />
a 12b<br />
12c d , i.e. f ∈ M(Γ12, <br />
−1<br />
d ,1,λ). We now follow a standard<br />
idea to “lift” f to a function <strong>of</strong> weight 1 on Γ0(144) with a Dirichlet character.<br />
Indeed, set<br />
g(z) = f (12z).<br />
Then, with<br />
A =<br />
<br />
a b<br />
144c d<br />
<br />
∈ Γ0(144),<br />
77
we see that<br />
<br />
az + b 12az + 12b<br />
g(Az) = g<br />
= f<br />
144cz + d 144cz + d<br />
<br />
a(12z) + 12b<br />
= f<br />
12c(12z) + d<br />
= e iArg(144cz+d)<br />
<br />
−1<br />
f (12z)<br />
= e iArg(144cz+d)<br />
d<br />
−1<br />
d<br />
<br />
g(z),<br />
i.e. g ∈ M(Γ0(144), <br />
−1<br />
d ,1,λ). The advantage <strong>of</strong> this transformation is that<br />
the theory <strong>of</strong> Hecke operators is well understood in the case <strong>of</strong> a Hecke congruence<br />
subgroup, Γ0(N), together with a Dirichlet character χ. In fact, the<br />
Hecke operators on M(Γ0(144), χ,1,λ) are the same as at weight 0:<br />
<br />
az + b<br />
Tn f = ∑ ∑ χ(d) f ,<br />
d<br />
ad=n<br />
d>0<br />
b mod d<br />
and the multiplicativity relation is the usual (cf. [69, p. 37 (para 3) and §4.5.]):<br />
TnTm = ∑<br />
d|(m,n)<br />
χ(d)dTmn .<br />
d2 We will now consider how the existence <strong>of</strong> these Hecke operators gives rise<br />
to relations between the Fourier coefficients <strong>of</strong> f . Assume that we have<br />
∞ a(n)<br />
f (z) = ∑ n + 1<br />
<br />
<br />
<br />
4π <br />
1 <br />
n + <br />
12<br />
y<br />
<br />
e n + 1<br />
<br />
x ,<br />
12<br />
then<br />
f (12z) =<br />
n=−∞<br />
∞<br />
∑<br />
n=−∞<br />
= √ 12<br />
a(n)<br />
n <br />
1 +<br />
∞<br />
∑<br />
n=−∞<br />
<br />
12<br />
W1 2 sgn(n),iR<br />
<br />
12<br />
W1 2 sgn(n),iR<br />
and hence the Fourier expansion <strong>of</strong> 1<br />
√12 g is<br />
78<br />
∑<br />
n≡1 mod 12<br />
<br />
<br />
4π <br />
1 <br />
n + <br />
12<br />
12y<br />
<br />
e n + 1<br />
<br />
12x<br />
12<br />
a(n)<br />
W1<br />
|12n + 1| 2 sgn(n),iR (4π |12n + 1|y)e((12n + 1)x),<br />
c(n)<br />
W1<br />
|n| 2 sgn(n),iR (4π|n|y)e(nx),
where<br />
<br />
n − 1<br />
c(n) = a .<br />
12<br />
The multiplicativity relations for the Hecke operators imply similar relations<br />
for the normalized coefficients c(n)/c(1) :<br />
<br />
−1<br />
<br />
mn<br />
c<br />
d d2 <br />
, (2.13)<br />
c(m)c(n) = c(1) ∑<br />
0
and that if g ∈ M(Γ0(144), <br />
−1<br />
d ,1,λ) satisfy Λg = εg with ε = ±1, and have<br />
Fourier coefficients c(n) as above, then<br />
c(−n) = ±iRc(n).<br />
Using this in combination with (2.13) we get the following relation<br />
c(−n)c(−m) = −R 2 c(1) ∑<br />
00<br />
−1<br />
d<br />
<br />
c<br />
mn<br />
d 2<br />
valid for −n ≡ −m ≡ 1 mod 12 (which implies mn ≡ 1 mod 12). If we change<br />
to a’s we get that for any positive integers m,n we have<br />
<br />
−1 (12m − 1)(12n − 1) − d2 a<br />
d<br />
12d2 <br />
.<br />
And to get a simpler relation (that is easy to verify numerically) we set<br />
m = −1, and we get two cases. If (12n − 1,11) = 1 then<br />
and if (12n − 1,11) = 11 then<br />
<br />
,<br />
a(−n) = −R2a(0) a(11n − 1), (2.17)<br />
a(−1)<br />
a(−n) = −R2 a(0)<br />
a(−1)<br />
<br />
a(11n − 1) − a<br />
n − 1<br />
11<br />
<br />
. (2.18)<br />
We have not seen relations <strong>of</strong> type (2.16)-(2.18) earlier in the literature. For<br />
some numerical examples, see Tables 2.2 and 2.3.<br />
Remark 2.4.4. It is clear that not all forms on M(Γ0(144), <br />
−1<br />
d ,1,λ) correspond<br />
to forms on M(Γ0(1),v2 η,1,λ) (look at the Weyl’s law for the two cases).<br />
From experiments we see that M(Γ0(1),v2 η,1,λ) seems to contain cosine forms<br />
<strong>of</strong> CM-type as well as other “generic” forms. See Table 2.4.<br />
2.5 Oldforms<br />
Clearly the usual f ∈ M(Γ0(M),v,k,λ) ⇒ f ∈ M(Γ0(N),v,k,λ) holds whenever<br />
M|N. The obvious notation is to call such a function f an oldform on<br />
M(Γ0(N),v,k,λ). We will look at one example <strong>of</strong> an oldform.<br />
80
2.5.1 Γ0(N) with N prime and η-multiplier<br />
The cusps are p1 = ∞ and p2 = 0, with cusp normalizing maps and stabilizers<br />
(i.e. generators <strong>of</strong> the stabilizer subgroups) <strong>of</strong> σ1 = Id, S1 = S and<br />
<br />
σ2 =<br />
0<br />
N<br />
−1<br />
0<br />
S2 = σ2Sσ −1<br />
2 =<br />
<br />
1<br />
−N<br />
0<br />
1<br />
.<br />
The shifts are α1 = k<br />
and let T = 0 −1<br />
1 0<br />
12 = Nα1.<br />
<br />
Suppose that f ∈ M(Γ0(1),v,k,λ),<br />
and dN = <br />
N 0<br />
0 1 so σ2 = T dN then<br />
12 and α2 = Nk<br />
f2(z) = f |σ2 (z) = jσ2 (z;k)−1 f (σ2z)<br />
= jσ2 (z;k)−1 f (T dNz)<br />
= jσ2 (z;k)−1 jT (dNz;k)v(T ) f (dNz)<br />
= e −ikArgz e ikArgz v(T ) f (dNz)<br />
= e −ikπ v(T ) f (Nz)<br />
= e −i π 2 k f (Nz) = (−i) k f (Nz).<br />
In terms <strong>of</strong> the Fourier series this means that<br />
f2(z) =<br />
c2(n)<br />
<br />
|n + α2| Wsgn(n+α2) k 2 ,µ(4π|n + α2|y)e((n + α2)x)<br />
f (Nz) =<br />
=<br />
=<br />
=<br />
∞<br />
∑<br />
−∞<br />
∞<br />
∑<br />
−∞<br />
∞<br />
∑<br />
−∞<br />
∞<br />
∑<br />
−∞<br />
∞<br />
∑<br />
m=−∞<br />
c1(n)<br />
<br />
|n + α1| Wsgn(n+α1) k 2 ,µ(4π|n + α1|Ny)e((n + α1)Nx)<br />
c1(n)<br />
<br />
|n + α2<br />
N |<br />
W α<br />
sgn(n+ 2<br />
N ) k 2 ,µ(4π|Nn + α2|y)e((Nn + α2)x)<br />
√<br />
Nc1(n)<br />
<br />
|Nn + α2| Wsgn(Nn+α2) k 2 ,µ(4π|Nn + α2|y)e((Nn + α2)x)<br />
√ <br />
m Nc1 N <br />
|m + α2| Wsgn(m+α2) k 2 ,µ(4π|m + α2|y)e((m + α2)x),<br />
where as usual c(r) = 0 if r ∈ Z, and since f2(z) = (−i) k f (Nz) we must have<br />
the following relation:<br />
c2(Nn) = (−i) k√ Nc1(n).<br />
81
2.6 The Eisenstein series<br />
In case there is a cusp p j at which the multiplier system is singular (i.e.<br />
v(S j) = 1) we have a continuous spectrum: [ 1<br />
4 ,∞) (with multiplicity equal<br />
to the number <strong>of</strong> singular cusps), and in general we can not say much about<br />
the embedded discrete spectrum in [ 1<br />
4 ,∞).<br />
Singular cusps can appear either because <strong>of</strong> the multiplier system, e.g. the<br />
θ-multiplier system, or because the “twist” α j is an integer (remember v(S j) =<br />
e 2πiα j ), e.g. on the modular group with the η-multiplier system and weight<br />
k = 12l.<br />
Remember that <strong>Maass</strong> <strong>waveforms</strong> are part <strong>of</strong> the discrete spectrum, but as<br />
we continuously “turn <strong>of</strong>f” the multiplier system, i.e. for v = v 2k<br />
η we let k → 0,<br />
the continuous spectrum will emerge in the limit. For this reason we want to<br />
review some details concerning the Eisenstein series on the modular group,<br />
i.e. for the rest <strong>of</strong> this section Γ = PSL(2,Z).<br />
2.6.1 Weight 0<br />
At weight 0 and singular character χ, the continuous spectrum <strong>of</strong> ∆ = ∆0 is the<br />
interval [ 1<br />
4 ,∞) and the eigenpacket is given by the Eisenstein series E(z;s; χ)<br />
defined by<br />
E(z;s; χ) = ∑<br />
T ∈Γ∞\Γ<br />
χ(T −1 )(ℑ(T z)) s ,<br />
where Γ∞ = [S]. (See [39, p. 65]). From proposition 6 <strong>of</strong> the same page we get<br />
E(z;s; χ) = y s + ϕ(s)y 1−s ∑ ϕm(s)<br />
m=0<br />
√ yK 1 s− (2π|m|y)e(mx)<br />
2<br />
here if W∞ = <br />
a b<br />
c d are the double coset representatives, i.e. Γ = ∑Γ∞W∞Γ∞<br />
then<br />
ϕ(s) = √ π Γs − 1<br />
<br />
2<br />
∞ )<br />
Γ(s)<br />
1<br />
,<br />
|c| 2s<br />
and<br />
82<br />
ϕm(s) = 2πs |m| s− 1 2<br />
Γ(s)<br />
∑ χ(W<br />
W∞∈Γ∞<br />
−1<br />
∑ χ(W<br />
W∞∈Γ∞<br />
−1<br />
∞ ) 1<br />
|c|<br />
2s e<br />
<br />
md<br />
.<br />
c
For trivial character χ = 1 we get (see page 76 <strong>of</strong> the above)<br />
ϕ(s) = √ π Γs − 1<br />
<br />
2 ζ (2s − 1)<br />
Γ(s) ζ (2s)<br />
ϕm(s) = 2πs |m| s− 1 2<br />
Γ(s)<br />
σ1−2s(|m|)<br />
.<br />
ζ (2s)<br />
Hence we can see that for s = 1<br />
2 + iR , the n−th Fourier coefficient <strong>of</strong> E(z;s)<br />
is given by<br />
<br />
1<br />
c(n) = ϕ + iR = K · |n|<br />
2 iR σ−2iR(|n|), (2.19)<br />
= K · |n| iR ∑<br />
d||n|,d>0<br />
d −2iR<br />
where K = K(R) is a constant dependent on R. First we observe the simple<br />
formula for prime coefficients (p is positive prime)<br />
c(p) = K · p iR (1 + p −2iR )<br />
= 2K · cos(Rln p)<br />
so we can compute quotients <strong>of</strong> c(p) and compare this with corresponding<br />
quotients for our forms <strong>of</strong> weight = 0.<br />
2.7 Half integer weight<br />
We know that the θ−function is an automorphic form (not a cusp form) <strong>of</strong><br />
weight 1<br />
2 on Γ0(4), hence we consider Γ0(4) together with the θ−multiplier<br />
system (cf. section 2.2.3).<br />
2.7.1 The Shimura correspondence<br />
Introduction – The Holomorphic Case<br />
We will consider the Shimura correspondence only in the particular case <strong>of</strong><br />
trivial character and level a square-free multiple <strong>of</strong> 4. Let Sk(M) denote the<br />
space <strong>of</strong> holomorphic cusp forms <strong>of</strong> weight k ∈ Z (and trivial multiplier) on<br />
Γ0(M), and let S 1 k+ (4N) denote the space <strong>of</strong> holomorphic cusp forms <strong>of</strong><br />
2<br />
weight k + 1<br />
2 , k ∈ Z and multiplier vθ , on Γ0(4N). The Shimura correspondence<br />
is a correspondence between the space S 1 k+ (4N) and spaces S2k(N<br />
2<br />
′ )<br />
for certain integers N ′ |4N (e.g. N ′ = 2N or N).<br />
The map from S 1 k+ to S2k was first constructed by Shimura [90] and later<br />
2<br />
was constructed by Shintani [92]. The for-<br />
an adjoint map from S2k to S k+ 1 2<br />
83
mer uses a Dirichlet-series and the latter uses an integral against a thetafunction.<br />
Both these maps commute with the Hecke operators that are acting<br />
on S2k(N) and S 1 k+ (4N) respectively. Kohnen [56, 57] proved that for<br />
2<br />
N odd and square-free, the correspondence is a bijection between the newforms<br />
on S2k(N) and a certain subspace, V + ⊆ S 1 k+ (4N). The subspace V<br />
2<br />
+<br />
is composed <strong>of</strong> Hecke eigenfunctions whose Fourier coefficients, c(n), satisfy<br />
certain vanishing properties; namely, c(n) = 0 for n ≡ 2,3 mod 4. (Here we<br />
shall mainly be interested in N = 1.)<br />
Extension to the Non-holomorphic case<br />
The extension <strong>of</strong> the Shimura correspondence and Kohnen’s result to spaces<br />
<strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong> has been investigated by e.g. Sarnak [87], Hejhal [37],<br />
Duke [28], Katok-Sarnak [53], Kojima [58, 59], Biró [13] and Arakawa [4].<br />
It is not clear exactly what the range and domain <strong>of</strong> the correspondence are<br />
in the <strong>Maass</strong> case.<br />
Define the two spaces U + ⊆ M(Γ0(1),0,2R) and V + ⊆ M Γ0(4),vθ , 1<br />
2 ,R<br />
<strong>of</strong> Hecke normalized <strong>Maass</strong> <strong>waveforms</strong>. Here U + consists <strong>of</strong> the even (cosine)<br />
Hecke eigenforms on Γ0(1) and V + consists <strong>of</strong> the Hecke eigenforms (<strong>of</strong> the<br />
) which are invariant under the operator L = τ4σ4 (cf.<br />
Hecke operators T vθ<br />
p 2 , 1 2<br />
Remark 2.4.3). As in the holomorphic case one can show that the condition<br />
L f = f is equivalent to the statement that the Fourier coefficients <strong>of</strong> f satisfy<br />
c(n) = 0 for n ≡ 2,3 mod 4 (cf. [56, prop. 2].<br />
From [53, prop. 4.1 and 2.3] we know that to each φ ∈V + there corresponds<br />
a lift f = F(φ), which is either ≡ 0 or in U + . (The “0” occurs if and only if<br />
the first Fourier coefficient <strong>of</strong> φ is zero.) Conversely it is also true that for<br />
each f ∈ U + there exists φ ∈ V + such that f = F(φ).<br />
By combining what is known from the holomorphic and non-holomorphic<br />
cases, we would also expect to find a correspondence between even newforms<br />
on Γ0(2) <strong>of</strong> weight 0 and spectral parameter 2R and certain (other, non V + )<br />
half integer forms on Γ0(4) with spectral parameter R, and indeed we found<br />
such a correspondence in our numerical investigations which we present in<br />
Subsection 2.9.4.<br />
Fourier coefficients<br />
We will now see how to relate the Fourier coefficients <strong>of</strong> the half integral and<br />
corresponding integral weight form.<br />
There are formulas in [53] and [58] connecting the Fourier coefficients <strong>of</strong><br />
half integral and integral weight, but due to differences in normalizations it<br />
might be clearer to go back to Shimura ([90]) and start there.<br />
Suppose first that we have two Hecke eigenforms: f and φ, where f (z) ∈<br />
M(Γ0(2),0,2R) + (the space <strong>of</strong> even newforms) and φ(z) ∈ M Γ0(4),vθ , 1<br />
2 ,R .<br />
84
Further suppose that their respective Fourier series expansions with respect to<br />
the cusp at ∞ are<br />
and<br />
f (z) =<br />
φ(z) =<br />
∞<br />
∑<br />
n=−∞<br />
n=0<br />
∞<br />
∑<br />
n=−∞<br />
n=0<br />
A(n) √ yK2iR (2π|n|y)e(nx),<br />
a(n)<br />
W1<br />
|n| 4 sgn(n),iR (4π|n|y)e(nx),<br />
where we use the normalization a(1) = 1 and A(1) = 1.<br />
By [53, eq. (4.2)] and the analogy with what happens in the holomorphic<br />
case (cf. [90, pp. 453, 458]), when f is the lift <strong>of</strong> φ, one has the following:<br />
Natural Conjecture. Let f ∈ M(Γ0(2),0,2R) + be the Shimura lift <strong>of</strong> φ ∈<br />
M Γ0(4),vθ , 1<br />
2 ,R . Suppose that f has Fourier coefficients {A(n)} and that φ<br />
has Fourier coefficients {a(n)}(with respect to ∞). Let t ∈ Z + be square free<br />
such that a(t) = 0. Then, for each n ∈ Z + , we have:<br />
A(n) = ∑<br />
kd=n<br />
k>0<br />
χ ′ t (k)<br />
√ k<br />
where χ ′ t is the quadratic residue symbol t<br />
·<br />
448(prop. 1.3), 458 (main theorem), 474 (line -11)].)<br />
Outline <strong>of</strong> pro<strong>of</strong>. Identify coefficients in the relation<br />
∞<br />
∑ A(n)n<br />
n=1<br />
−s = c · L<br />
<br />
s + 1<br />
2 , χ′ t<br />
a td2 , (2.20)<br />
a(t)<br />
considered mod 4t. (Cf. [90, pp.<br />
∞<br />
∑ a<br />
n=1<br />
tn 2 n −s , (2.21)<br />
which can be seen as the <strong>Maass</strong> waveform equivalent <strong>of</strong> [90, p. 458] and [72,<br />
p. 159], or alternatively as an extension (to newforms) <strong>of</strong> [53, eqs. (0.15) and<br />
(4.2)].<br />
To obtain this relation, it seems that it is possible to follow the construction<br />
in [53], but using the theta function from Example 3 in [72, p. 151–153] instead<br />
<strong>of</strong> θ(z,g). In our setting this amounts to twisting the theta function by the<br />
character <br />
t<br />
· , and apart from different transformation rules all calculations in<br />
[53] should go through.<br />
The main difference in the argument is that instead <strong>of</strong> starting with a function<br />
φ(z) on Γ0(4), one starts with φ(tz) on Γ0(4t). Cf. [90, p. 474]. Also see<br />
[54, prop. 4.1 and thm. 5.1(2)]<br />
85
In the earlier (oldform) setup <strong>of</strong> [53], (2.21) should hold with χ ′ t considered<br />
mod t. Likewise for (2.20).<br />
This point requires one clarification, however. Namely: since weight 0<br />
oldforms on Γ0(2) occur in pairs, the Shintani map can be expected to give<br />
rise to a corresponding pair <strong>of</strong> weight 1<br />
2 forms on Γ0(4). In a suitable basis,<br />
one <strong>of</strong> these should lie in the space V + ; the other should not but should still<br />
for p = 2. Cf. [69, lemmas 4.6.2<br />
have the same Hecke eigenvalues under T vθ<br />
p 2 , 1 2<br />
and 4.6.10]. In light <strong>of</strong> this, the second form can still be expected to satisfy<br />
(2.20), but only for (n,4) = 1.<br />
The preceding (partly conjectural) statements are backed by strong numerical<br />
evidence. Part <strong>of</strong> this evidence can be found in Table 2.8. Further conjectures<br />
(backed by numerics) concerning the Shimura correspondence can be<br />
found in Section 2.9.4.<br />
See [19, §4.1] and [21, p. 633], and [91, pp. 502 (bottom) – 504 (top)] for<br />
some additional perspectives.<br />
2.8 Some <strong>Computational</strong> Remarks<br />
A priori there are basically only two modifications that need to be done in<br />
order to make the weight zero algorithm work in the general case:<br />
• the K-Bessel function needs to be replaced with the Whittaker function,<br />
and<br />
• the automorphy condition needs to incorporate the multiplier system.<br />
The first modification, although trivial in theory is the most complex in terms<br />
<strong>of</strong> the numerics involved. There was no efficient algorithm for the Whittaker<br />
function in the literature and we had to develop a new algorithm. We used the<br />
integral representation (cf. [39, p. 375 (top)])<br />
<br />
2x ∞<br />
Wk,iR(2x) = e<br />
π<br />
−xcosht <br />
Ψ<br />
0<br />
−k; 1<br />
;x(1 + cosht)<br />
2<br />
<br />
cosh[iRt]dt,<br />
where Ψ is a confluent hypergeometric function together with a stationary<br />
phase method to develop a robust and efficient algorithm. This algorithm is<br />
in essence similar to Hejhal’s algorithm (cf. [42]) for the K-Bessel function,<br />
KiR(x), and the generalization <strong>of</strong> it made by Avelin (cf. [9]) to a complex<br />
argument, Ks(x), s ∈ C. The details <strong>of</strong> this algorithm are described in Chapter<br />
4.<br />
To modify the automorphy condition is trivial. Observe that f j(z) = f |σ (z) = j<br />
jσ j (z;k)−1 f (σ jz), and with z∗ −1<br />
j = σI( j) UI( j)Tjσ jz (cf. p. 35) the automorphy<br />
condition (1.19) now becomes:<br />
86
f j(z) = jσ j (z;k)−1 f (σ jz) = jσ j (z;k)−1 f (T −1 −1<br />
j UI( j) σI( j)z ∗ j)<br />
= jσ j (z;k)−1v(T −1 −1<br />
j UI( j) ,k) jT −1<br />
j U−1 (σI( j)z<br />
I( j)<br />
∗ j;k) f (σI( j)z ∗ j)<br />
= jσ j (z;k)−1 j −1<br />
Tj U−1 (σI( j)z<br />
I( j)<br />
∗ j;k) jσ (z I( j) ∗ j;k)v(T −1 −1<br />
j UI( j) ,k) fI( j)(z ∗ j).<br />
The entire setup <strong>of</strong> the Phase 1 algorithm (i.e. locating eigenvalues and<br />
computing the first few Fourier coefficients) goes through exactly as in the<br />
case <strong>of</strong> weight 0 (cf. Section 1.3.2) with some trivial modifications. For the<br />
sake <strong>of</strong> completeness we will give an outline <strong>of</strong> the modified algorithm.<br />
Consider a <strong>Maass</strong> waveform, f , <strong>of</strong> weight k and multiplier system v. At<br />
each cusp it has a Fourier series<br />
fi(z) =<br />
∞<br />
∑<br />
−∞<br />
n+α i =0<br />
ci(n)<br />
|n + αi| W sgn(n+αi) k 2 ,iR(4π|n + αi|y)e((n + αi)x),<br />
and since the Whittaker function is ultimately exponentially decaying, given<br />
an ε > 0, there exists a constant (depending on y and ε), M(y), such that<br />
fi(z) = ˆfi(z) + [[ε]],<br />
where we use [[ε]] to denote a constant <strong>of</strong> magnitude less than ε. The truncated<br />
Fourier series<br />
ˆfi(z) =<br />
M(Y )<br />
∑<br />
−M(Y )<br />
n+α i =0<br />
ci(n)<br />
<br />
|n + αi| Wsgn(n+αi) k 2 ,iR(4π|n + αi|y)e((n + αi)x),<br />
is now viewed as a discrete Fourier transform, and if we take the inverse<br />
transform over the horocyclic points: zm = xm + iY , 1 − Q ≤ m ≤ Q, where<br />
− m) we get:<br />
xm = 1 1<br />
2Q ( 2<br />
1<br />
2Q<br />
= 1<br />
2Q<br />
=<br />
Q<br />
∑<br />
1−Q<br />
Q<br />
∑<br />
1−Q<br />
M(Y )<br />
∑<br />
−M(Y )<br />
l+α i =0<br />
ˆfi(zm)e(−(n + α j)xm) =<br />
M(Y )<br />
∑<br />
−M(Y )<br />
l+α i =0<br />
ci(l)<br />
<br />
|l + αi| Wsgn(l+αi) k 2 ,iR(4π|l + αi|Y )e((l + αi)xm − (n + α j)xn)<br />
ci(l)<br />
<br />
|l + αi| Wsgn(l+αi) k 2 ,iR (4π|l + αi|Y ) 1<br />
2Q<br />
= ci(n)<br />
|n + α j| W sgn(n+α j) k 2 ,iR (4π|n + α j|Y ),<br />
Q<br />
∑<br />
1−Q<br />
e((l + αi)xm − (n + α j)xn)<br />
87
where we used the fact that<br />
Q<br />
1<br />
2Q ∑ e((l + αi)xm − (n + α j)xn)<br />
1−Q<br />
=<br />
<br />
(l + αi − n − α j)<br />
e<br />
×<br />
4Q<br />
1<br />
2Q ×<br />
Q <br />
× ∑ e −(l + αi − n − α j) m<br />
<br />
2Q<br />
[since α ∈ [0,1)] = δnl.<br />
1−Q<br />
= δ{l + αi = n + α j}<br />
Now we also have fi(zm) = χmi fI(m,i)(z∗ mi ), where<br />
χmi = jσi (zm;k) −1 j −1<br />
Ti U−1<br />
I(m,i) σI(m,i) (z∗mi;k)w(T −1<br />
i<br />
Hence<br />
where<br />
i j<br />
Vnl =<br />
= 1<br />
2Q<br />
= 1<br />
2Q<br />
=<br />
U −1<br />
I(m,i) ,σI(m,i))v(T −1<br />
i<br />
ci(n)<br />
<br />
|n + αi| Wsgn(n+αi) k 2 ,iR(4π|n + αi|y)<br />
κ<br />
∑<br />
j=1<br />
We then define ˜V<br />
i j<br />
nl by<br />
˜V<br />
i j i j<br />
nl = V<br />
Q<br />
∑<br />
1−Q<br />
fi(zm)e(−(n + αi)xm) + [[ε]]<br />
Q<br />
∑ χmi fI(m,i)(z 1−Q<br />
∗ mi)e(−(n + αi)xm) + [[ε]]<br />
M0<br />
∑<br />
l=−M0<br />
n+α i =0<br />
1 1<br />
<br />
|l + α j| 2Q<br />
c j(l)V<br />
i j<br />
nl<br />
+ 2[[ε]],<br />
U −1<br />
Q<br />
∑ χmiWsgn(l+α j)<br />
1−Q<br />
I(m,i)= j<br />
k 2 ,iR(4π|l + α j|y ∗ m j) ×<br />
×e (l + α j)x ∗ <br />
m j e(−(n + αi)xm).<br />
nl − δnlδ ji<br />
1<br />
<br />
|n + αi| Wsgn(n+αi) k 2 ,iR(4π|n + αi|Y ).<br />
If we now neglect the error ε we have a linear system<br />
I(m,i) ,k).<br />
CV = 0, (*)<br />
which must be satisfied by the Fourier coefficients <strong>of</strong> f . Here V is the matrix<br />
˜V<br />
i j<br />
nl and C is the vector ci(n), both depending on R and Y . The basic idea<br />
88
<strong>of</strong> Phase 1 is now to locate eigenvalues R together with sets <strong>of</strong> corresponding<br />
Fourier coefficients, ci(n), by solving (*) repeatedly for different R’s, and<br />
seeking those values <strong>of</strong> R for which the solution vectors C = C(R,Y ) are stable<br />
under changes <strong>of</strong> Y . That is, if C(R,Y1) ≈ C(R,Y2) (for Y1and Y2 < Y0,<br />
for some suitable constant Y0) we take it as an indication that the R is close<br />
to an eigenvalue and that the components <strong>of</strong> C are close to the corresponding<br />
Fourier coefficients. For more details and justifications see Section 1.3.2.<br />
We note that the Phase 2 algorithm <strong>of</strong> Section 1.3.3 (i.e. computation <strong>of</strong><br />
a larger set <strong>of</strong> Fourier coefficients) also generalizes to non zero weight in a<br />
similar manner.<br />
2.9 Numerical results<br />
The experimental excursions have been directed towards three essentially different<br />
subjects, but, in each, we have worked in an exploratory spirit.<br />
• First we tried to get an over-all picture <strong>of</strong> the distribution <strong>of</strong> small to middlerange<br />
sized eigenvalues on PSL(2,Z) (and the eta multiplier) for “large”<br />
weights, e.g. R ∈ [0,14] and k ∈ [0.1,6].<br />
• Second, we continuously “turned <strong>of</strong>f” the multiplier system v2k η on PSL(2,Z)<br />
by letting the weight k → 0 and studied the varying distribution <strong>of</strong> eigenvalues,<br />
Nk(T ), as well as the formation <strong>of</strong> the continuous spectrum.<br />
• There are some cases where arithmeticity plays a role even in nonzero<br />
weight. We studied the Shimura correspondence between weight zero<br />
forms on Γ0(2) and weight one half forms on Γ0(4). And we also studied<br />
weight one forms on PSL(2,Z) which correspond to Hecke eigenforms<br />
on Γ0(144) with a Dirichlet character.<br />
Further data than that which is presented in this section is available from the<br />
author upon request.<br />
2.9.1 Varying weight<br />
The first experiment considered was to tabulate the first few eigenvalues (up<br />
to R = 14) for PSL(2,Z) and the multiplier system v2k η , <strong>of</strong> weight k ∈ (0,6]<br />
(cf. Section 2.4.5). We made the computations for k ∈ [0.1, 6] with a grid size<br />
<strong>of</strong> 0.01, and the results are presented in Figure 2.1. We stress here, that the<br />
arcs in Figure 2.1 terminate at k = 0.1; it is not excluded that they might go<br />
lower.<br />
For some examples <strong>of</strong> eigenvalues for “large” weights see Table 2.1. This<br />
data should be compared with data obtained by Mühlenbruch, [70, p. 160],<br />
who used a completely different method (with much less accuracy). We note<br />
here that as R increases, the negative Fourier coefficients seem to grow rapidly<br />
89
Figure 2.1: Section <strong>of</strong> eigenvalues with 0 < R ≤ 14, and weight 0.1 ≤ k ≤ 6.<br />
R<br />
14<br />
12<br />
10<br />
8<br />
6<br />
4<br />
2<br />
0<br />
0.1 1 2 3 4 5 6<br />
Weight k<br />
in magnitude (as compared to the positive ones, with the normalization c(1) =<br />
1) for “large” weights.<br />
We believe that we have found all eigenvalues with (R,k) ∈ [0,14]×[0.1, 6].<br />
This belief is founded on the “continuity” <strong>of</strong> the resulting graphs R j(k) (cf. Figure<br />
2.1), where R j(k) is the j-th eigenvalue at weight k, considered as a function<br />
<strong>of</strong> k. By standard results (e.g. [17, p. 149]) R j(k) should be a real analytic<br />
function in this interval.<br />
Remember that, for k ≥ 0, the smallest eigenvalue, λmin, corresponds to<br />
the function F(z) = y k 2 η(z) 2k . A lower bound for the second smallest eigenvalue,<br />
λ0(k), is discussed in [17, p. 183]. Bruggeman finds two such bounds,<br />
both positive, which he calls µ0(k) and µ1(k) (µ1 is better than µ0 in a certain<br />
interval I ⊂ [0,2].) Figure 2.2 shows a comparison between the R-values corresponding<br />
to these bounds and the smallest experimentally found eigenvalues<br />
in the interval k ∈ [0.1, 6]; we see that Bruggeman’s bounds can be improved<br />
quite a bit.<br />
2.9.2 Small weights<br />
The investigation <strong>of</strong> eigenvalues for small weights k has been done in the<br />
interval R ∈ [0,20], and k = 10 − j , where 1 ≤ j ≤ 12, i.e. k ∈ [10 −12 ,0.1]. We<br />
believe that most cusp forms were found.<br />
Let us use the notation<br />
λ j(k)<br />
for the j-th discrete eigenvalue at weight k, and φ j(k) for the corresponding<br />
cusp form. It is then a basic fact that λ j(k) depends continuously on k, but<br />
it can also be shown that for k ∈ (0,12) λ j is even real analytic in k. That is,<br />
φ j(k) belong to an “analytic family” in the terminology <strong>of</strong> Bruggeman (see<br />
90
Figure 2.2: Comparison with the theoretical lower bounds in k ∈ [0.1,6].<br />
R<br />
4.0<br />
3.5<br />
3.0<br />
2.5<br />
2.0<br />
1.5<br />
1.0<br />
0.5<br />
µ1(k)<br />
µ0(k)<br />
0.0<br />
0.1 1 2 3 4 5 6<br />
Weight k<br />
[17, 18]). In connection with this, it should also be noted that our experiments<br />
support the statement in Observation 71 in [70] that the first few cusp forms<br />
at weight 0 do not belong to an analytic family <strong>of</strong> cusp forms defined in the<br />
interval (−12,12). Indeed we find that in the range considered we actually<br />
seem to have λ j(k) → 0 as k → 0 which is consistent with Bruggeman’s result<br />
(cf. case ii) b) in Prop. 2.17 in [17, p. 149]).<br />
Our experiments indicate that for fixed small k, the “generic” cusp forms<br />
φ j(k) can be divided into two classes:<br />
• C(k), and<br />
• E(k).<br />
Here C(k) consists <strong>of</strong> functions φ j(k) such that λ j(k) is close to an eigenvalue<br />
<strong>of</strong> a cusp form at weight 0 and the Fourier coefficients are close to the<br />
corresponding coefficients <strong>of</strong> the weight-zero cusp form.<br />
E(k) on the other hand consists <strong>of</strong> functions φ j(k) such that the Fourier<br />
coefficients are close to the Fourier coefficients <strong>of</strong> the Eisenstein series E(z,s)<br />
where λ j(k) = s(1 − s).<br />
The typical difference between the Fourier coefficients at weight k and<br />
weight 0 are in both cases basically <strong>of</strong> order k; for the forms in C(k), the<br />
distance between λ j(0) and the corresponding discrete eigenvalue at weight 0<br />
is much smaller than k.<br />
The “generic” in the statement above means that we exclude certain places<br />
where the families φ j(k) changes character between C(k) and E(k). In these<br />
cases we have a situation <strong>of</strong> almost multiplicity 2, and in too coarse resolution<br />
it actually looks like the analytic families intersect.<br />
Note that Weyl’s law for non-trivial η-multiplier and a fixed non zero weight<br />
91
k on PSL(2,Z) is<br />
T 2 T<br />
<br />
<br />
Nk(T ) = ♯{R ≤ T } = − ln1<br />
− e<br />
12 π<br />
kπ 6 i<br />
<br />
<br />
+ S(T ) + O(1),<br />
for T ≥ 1 (cf. [39, p. 466]). One would like to say that the last two terms are<br />
bounded uniformly in k, and indeed one can easily show that the O(1) term<br />
is uniformly bounded in k. It seems plausible that, using techniques from<br />
[41, 38, 39], one should be able to prove that S(T ) is also uniformly bounded<br />
in k as k → 0. Details in that direction might appear in a later paper, but<br />
for now we simply make an assumption (heuristic, but backed by numerical<br />
evidence) that S(T ) is uniformly bounded in k. We then have the following<br />
(conjecture):<br />
Nk(T ) = N0(T ) − T<br />
π ln<br />
<br />
<br />
1 − e kπ 6 i<br />
<br />
<br />
+ O(1) = N0(T ) − T<br />
π ln<br />
<br />
kπ<br />
+ O(1),<br />
6<br />
(2.22)<br />
as k → 0, where<br />
T 2<br />
N0(T ) =<br />
12 .<br />
We have computed Nk(T ) experimentally for k = 10− j , j = 4,...,12, and Figure<br />
2.3 shows a picture <strong>of</strong> the experimental values compared to the theoretical<br />
values obtained by (2.22) (with the O(1) term neglected) and the difference<br />
indeed seems to be constant over this range.<br />
From the form <strong>of</strong> the Weyl law above, we also see that the successive spac-<br />
π<br />
ings ∆n(k) = Rn+1(k)−Rn(k) should look about like<br />
|ln kπ 6 | , i.e. ∆n(k) ≈ π<br />
|ln kπ 6 | .<br />
Figure 2.4 provides a nice illustration <strong>of</strong> this fact, where it is clearly seen that<br />
the average spacings are almost constant for small k and this constant is pro-<br />
. The mean gap over 10 typical cases (at R ≈ 10) turned out<br />
portional to 1<br />
|lnk|<br />
to be 0.118 at k = 10−9 , 0.109 at k = 10−10 and 0.100 at k = 10−11 . The rel-<br />
ative quotients, ∆n(k) <br />
kπ ln , 6 are 2.52, 2.58, 2.60, respectively, and it is not<br />
inconceivable that one obtains 3.14 in the (logarithmic) limit.<br />
Level repulsion<br />
From figures like 2.4 it one may be tempted to think that there are horizontal<br />
lines corresponding to cusp forms at weight 0 which crosses the lines that are<br />
going down (i.e. corresponding to the Eisenstein series at weight 0). This is<br />
not the case! If we look closer we will see that there is actually “level repulsion”<br />
here, i.e. the horizontal “cusp-form-line” turns down at the crossing and<br />
becomes an “Eisenstein-series-line”, and the previous “Eisenstein-series-line”<br />
turns into a “cusp-form-line”. More precisely formulated: if there is a “near<br />
crossing” at the weight k0 close to the eigenvalue R0 ≈ R j(k0) ≈ R j+1(k0), then<br />
92
Figure 2.3: Plot <strong>of</strong> Weyl’s law with constant T = 20 and weight k → 0<br />
Nk(20)<br />
200<br />
180<br />
160<br />
140<br />
120<br />
100<br />
80<br />
60<br />
3 4 5 6 7 8 9 10 11 12<br />
−log10(k)<br />
Nk(20)<br />
Experimental data<br />
Figure 2.4: Section <strong>of</strong> eigenvalues with 9 ≤ R ≤ 14, and 1E − 9 ≤ k ≤ 1E − 7.<br />
14<br />
13<br />
12<br />
11<br />
10<br />
9<br />
0 1e-08 2e-08 3e-08 4e-08 5e-08 6e-08 7e-08 8e-08 9e-08 1e-07<br />
there are two analytic families φ j(k) and φ j+1(k) such that for some δ > ε > 0:<br />
<br />
φ j(k) ∈<br />
C(k),<br />
E(k),<br />
k ∈ [k0 + ε,k0 + δ],<br />
k ∈ [k0 − δ,k0 − ε],<br />
and<br />
φ j+1(k) ∈<br />
<br />
E(k), k ∈ [k0 + ε,k0 + δ],<br />
C(k), k ∈ [k0 − δ,k0 − ε],<br />
and in the interval (k0 − ε,k0 + ε) both families display a mixing between the<br />
two types E(k) and C(k). In fact, the Fourier coefficients <strong>of</strong> φ j+1 converge<br />
93
(as k → k0 − ε) to values close to the Fourier coefficients <strong>of</strong> φ j for k > k0 +<br />
ε and vice versa. Since the two functions also need to be orthogonal it is<br />
clear that the Fourier coefficients exhibit “wild” behaviour in the small interval<br />
surrounding the “near crossing”. Note also that, as k → 0, all φ j(k) ∈ E(k) and<br />
R j(k) → 0.<br />
See Table 2.9 for examples <strong>of</strong> Fourier coefficients corresponding to eigenfunctions<br />
<strong>of</strong> types E(k) and C(k), close to an avoided crossing at weight<br />
k=9.044605824E-8. Table 2.10 illustrates the agreement between the Fourier<br />
coefficients <strong>of</strong> a more generic cusp form in E(k) and the corresponding coefficients<br />
<strong>of</strong> the Eisenstein series (appropriately normalized) at weight 0. The<br />
level <strong>of</strong> agreement is striking to put it mildly; likewise in Table 2.9 for the<br />
C(k) eigenfunction. The “1 for 1” nature <strong>of</strong> this convergence in the presence<br />
<strong>of</strong> a limiting continuous spectrum seems not to have been suspected earlier.<br />
Cf. [41, thm. 6.6 and cor. 6.9] and [40].<br />
The fact that the system seems to avoid accidental degeneracies by means<br />
<strong>of</strong> level repulsion and avoided crossings is in agreement with the Wigner-von<br />
Neumann theorem, cf. [101].<br />
2.9.3 Lifts at weight 1<br />
As we saw in Section 2.4.7 we could prove the existence <strong>of</strong> certain Hecke<br />
relations at weight 1 (e.g. (2.16), (2.17) and 2.18)). Tables 2.2 and 2.3 contain<br />
numerical verifications <strong>of</strong> these relations. Table 2.4 contains a list <strong>of</strong> computed<br />
eigenvalues on M Γ0(1),v 2 η,1,λ , and the eigenvalues corresponding<br />
to cosine CM-forms are indicated. In these cases, we have computed the actual<br />
error since we know the exact eigenvalues:<br />
Rk =<br />
2πk<br />
<br />
ln 7 + 2 √ , k ∈ Z<br />
12<br />
+ .<br />
Note that the actual error is in general much smaller than the error-parameter<br />
which is basically H(Y1,Y2) = |c(2) − c ′ (2)| + |c(3) − c ′ (3)| + |c(4) − c ′ (4)|,<br />
where c(n) is computed with Y1 and c ′ (n) with Y2.<br />
2.9.4 Half integer weight<br />
We now consider the case <strong>of</strong> Γ0(4) and the θ-multiplier system. The aim <strong>of</strong><br />
our investigation in this case was to study the Shimura lift, and in particular to<br />
investigate the dimensions <strong>of</strong> the spaces <strong>of</strong> half integer weight forms.<br />
Our numerical results indicate that the following conjectures are true:<br />
• If M(Γ0(2),0,2R) is an even (cosine) oldspace, then M(Γ0(4),vθ , 1<br />
2 ,R) has<br />
dimension 2. (Cf. our earlier remark about this in §2.7.1.)<br />
94
Figure 2.5: Level repulsion at R = 13.779...<br />
R<br />
R<br />
R<br />
14.1<br />
14.0<br />
13.9<br />
13.8<br />
13.7<br />
13.6<br />
13.5<br />
1.0e-03 1.2e-03 1.4e-03 1.6e-03 1.8e-03<br />
13.7805<br />
13.7800<br />
13.7795<br />
13.779760<br />
13.779755<br />
13.779750<br />
(a)<br />
Weight k<br />
1.6360e-03 1.6366e-03 1.6372e-03 1.6378e-03<br />
(c)<br />
Weight k<br />
1.636794e-03 1.636800e-03 1.636806e-03<br />
(e)<br />
Weight k<br />
R<br />
R<br />
R<br />
13.820<br />
13.800<br />
13.780<br />
13.760<br />
13.77980<br />
13.77975<br />
13.77970<br />
13.7797515<br />
13.7797510<br />
13.7797505<br />
1.60e-03 1.63e-03 1.66e-03 1.69e-03<br />
(b)<br />
Weight k<br />
1.63670e-03 1.63676e-03 1.63682e-03 1.63688e-03<br />
(d)<br />
Weight k<br />
1.6367962e-03 1.6367970e-03 1.6367978e-03<br />
(f)<br />
Weight k<br />
• In such 2-dimensional space, we can choose one (basis) function from the<br />
space V + , i.e. it has c1(n) = 0 if n ≡ 2,3 mod 4 (cf. §2.7.1).<br />
• Suppose that f ∈ M(Γ0(2),0,2R) is an even (cosine) newform, which satisfy<br />
f − 1<br />
<br />
2z = ε f (z), where ε = ±1. Then M(Γ0(4),vθ , 1<br />
2 ,R) is one dimensional.<br />
Furthermore, if the inverse Shimura lift <strong>of</strong> f , φ ∈ M(Γ0(4),vθ , 1<br />
2 ,R)<br />
has Fourier coefficients c(n) (with respect to ∞) then there are two cases:<br />
• If ε = 1 we can normalize φ with c(n) = 1 and we also have c(n) = 0<br />
for n ≡ 5 mod 8 (cf. R = 4.4614... in Table 2.9.4).<br />
• If ε = −1 then c(1) = 0, and we can normalize φ with c(2) = 1 and<br />
we also have c(n 2 ) = 0 for all n and c(n) = 0 for n ≡ 1 mod 8 (cf. R =<br />
6.0464... in Table 2.9.4).<br />
95
Figure 2.6: Level repulsion at R = 9.533...<br />
R<br />
R<br />
R<br />
10.0<br />
9.8<br />
9.6<br />
9.4<br />
9.2<br />
9.0<br />
9.533700<br />
9.533695<br />
9.533690<br />
9.53369535<br />
9.53369530<br />
9.53369525<br />
9.53369520<br />
9.53369515<br />
1.20e-08 1.60e-08 2.00e-08 2.40e-08 2.80e-08<br />
(a)<br />
Weight k<br />
2.43549e-08 2.43551e-08 2.43553e-08 2.43555e-08<br />
(c)<br />
Weight k<br />
2.4355247e-08 2.4355252e-08 2.4355257e-08<br />
(e)<br />
Weight k<br />
R<br />
R<br />
R<br />
9.53378<br />
9.53374<br />
9.53370<br />
9.53366<br />
9.53362<br />
9.5336956<br />
9.5336954<br />
9.5336952<br />
9.5336950<br />
9.533695264<br />
9.533695262<br />
9.533695260<br />
9.533695258<br />
9.533695256<br />
2.4350e-08 2.4353e-08 2.4356e-08 2.4359e-08<br />
(b)<br />
Weight k<br />
2.435523e-08 2.435525e-08 2.435526e-08 2.435528e-08<br />
(d)<br />
Weight k<br />
2.43552545e-08 2.43552547e-08 2.43552549e-08<br />
(f)<br />
Weight k<br />
Tables 2.5 and 2.9.4 contain examples <strong>of</strong> Fourier coefficients at weight 1<br />
2 and<br />
Table 2.8 contains a comparison <strong>of</strong> Fourier coefficients computed both from<br />
forms on Γ0(2) via (2.20) and computed directly. A supplement <strong>of</strong> Fourier<br />
coefficients for the weight 0 forms is available in Table 2.7.<br />
96
Table 2.1: Eigenvalues for N = 1, v = vη<br />
k = 5.0<br />
R |c(−1)| a H(y1,y2)<br />
3.66240686691 2E+3 8E-09<br />
5.77698688079 6E+3 1E-09<br />
6.64285171609 1E+4 2E-09<br />
7.82634704661 7E+4 8E-07<br />
8.66620831839 8E+4 1E-08<br />
9.45156176778 4E+4 4E-09<br />
10.21802876612 9E+4 2E-08<br />
10.65897262925 2E+5 5E-09<br />
11.27526358329 2E+5 2E-08<br />
12.15792337439 5E+6 2E-06<br />
12.55403510011 3E+5 3E-09<br />
13.00123950671 4E+4 2E-09<br />
13.67542640619 8E+5 8E-09<br />
13.71353384347 4E+6 4E-07<br />
14.47039277248 6E+5 1E-09<br />
15.03845367363 1E+6 6E-09<br />
15.39856858318 1E+6 1E-09<br />
15.85705128856 7E+4 7E-09<br />
16.14536205683 5E+6 2E-07<br />
16.45061260141 2E+6 1E-08<br />
16.93043847901 2E+7 2E-08<br />
17.51562192888 2E+5 4E-09<br />
17.59022138300 1E+6 6E-10<br />
18.13826107361 7E+6 2E-08<br />
18.32637702289 5E+5 5E-09<br />
18.76341585136 2E+6 5E-09<br />
19.16629116326 4E+6 8E-10<br />
19.67214438521 3E+7 2E-07<br />
19.68520099819 1E+6 3E-10<br />
20.00524829746 2E+6 4E-09<br />
20.38266630653 3E+6 3E-10<br />
20.67297062056 6E+6 4E-08<br />
20.97339376061 6E+6 8E-10<br />
k = 5.25<br />
a The normalization we have used here is the usual c(1) = 1.<br />
R |c(−1)| a H(y1,y2)<br />
3.68037312372 3E+3 3E-08<br />
5.82067054942 9E+3 6E-09<br />
6.63460520751 2E+4 3E-09<br />
7.90867228426 2E+5 9E-09<br />
8.61646891946 1E+5 8E-09<br />
9.56930344151 7E+4 5E-09<br />
10.15656706121 2E+5 2E-09<br />
10.70911890024 2E+5 4E-10<br />
11.34046324165 4E+5 2E-08<br />
12.11839521329 4E+6 2E-06<br />
12.65021958486 4E+5 9E-09<br />
13.02622821839 8E+4 2E-09<br />
13.56022943627 1E+6 1E-07<br />
13.87057635696 7E+5 4E-07<br />
14.48204838116 1E+6 7E-05<br />
15.09966704087 4E+7 1E-07<br />
15.38981845044 1E+6 4E-09<br />
15.94059443942 1E+4 3E-09<br />
16.09999759486 8E+6 7E-06<br />
16.52671557073 5E+6 1E-09<br />
16.90856097808 2E+7 5E-08<br />
17.53730159778 1E+6 3E-10<br />
17.74142373355 7E+6 4E-09<br />
18.02022951826 6E+6 9E-10<br />
18.37970066644 8E+5 2E-09<br />
18.90587158951 1E+7 8E-09<br />
19.09726131554 1E+7 5E-10<br />
19.66894569593 5E+6 3E-10<br />
19.73195996101 7E+6 4E-10<br />
20.12609436572 2E+6 3E-10<br />
20.35571778301 1E+7 7E-10<br />
20.71020380483 6E+6 8E-09<br />
20.88321504381 1E+7 2E-09<br />
97
Table 2.2: Fourier coefficients for a CM-form<br />
f ∈ M(Γ0(1),v 2 η,1,4.770984191561)<br />
n c(n)/c(0) a Error<br />
0 1.755930576575<br />
1 1.000000000000<br />
2 −1.755930576574 c(27) 0.4E-08<br />
3 1.571810322167 c(40) 0.1E-08<br />
4 1.755930576575 c(53) 0.7E-08<br />
5 −1.770268323978 c(66) 0.3E-09<br />
6 −2.474798320759 c(79) 0.1E-08<br />
7 0.000000000000 c(92) 0.4E-08<br />
8 0.346240855507 c(105) 0.5E-08<br />
9 3.510179255561 c(118) 0.3E-08<br />
10 1.116593241680 c(131) 0.4E-08<br />
11 −0.000000000001 c(144) 0.3E-08<br />
12 0.000000000001 c(157) 0.1E-07<br />
13 −3.019229958496 c(170) 0.8E-08<br />
14 −1.186431979458 c(183) + c(1) 0.3E-08<br />
15 −3.079783541463 c(196) 0.5E-08<br />
−c(n)c(−1)/R 2 /c(0)<br />
-1 5.055064268188 b 0.1E-11<br />
-2 −11.180067729976 c(21) 0.4E-07<br />
-3 0.000000000001 c(32) 0.2E-07<br />
-4 16.472675660354 c(43) 0.2E-08<br />
-5 16.729030199659 c(54) 0.5E-07<br />
-6 13.098490835617 c(65) 0.5E-08<br />
-7 16.046414105740 c(76) 0.1E-07<br />
-8 −0.000000000023 c(87) 0.1E-07<br />
-9 13.340740291248 c(98) 0.3E-07<br />
-10 0.000000000006 c(109) 0.4E-07<br />
-11 2.151215034503 c(120) 0.7E-08<br />
-12 2.878852009050 c(131) − c(1) 0.2E-07<br />
-13 0.000000000039 c(142) 0.6E-08<br />
-14 7.496795049955 c(153) 0.4E-07<br />
-15 −12.830881007618 c(164) 0.4E-07<br />
a This quotient is deduced from formula (2.14) or (2.15) on p.<br />
79.<br />
b c(−1) 2 = −R2c(0)(c(10) − c(0))<br />
98
Table 2.3: Fourier coefficients for a non-CM-form<br />
f ∈ M(Γ0(1),v 2 η,1,3.66240686698667)<br />
n c(n)/c(0) a Error<br />
0 −1.352193685534<br />
1 1.000000000000<br />
2 −1.697113317091 c(27) 0.5E-08<br />
3 −0.057989599353 c(40) 0.4E-07<br />
4 2.461764397786 c(53) 0.1E-07<br />
5 0.510856433057 c(66) 0.6E-08<br />
6 −0.952325903762 c(79) 0.8E-08<br />
7 −1.660630683908 c(92) 0.2E-07<br />
8 −2.343382246022 c(105) 0.9E-08<br />
9 1.271097206907 c(118) 0.1E-07<br />
10 −0.203512820511 c(131) 0.6E-08<br />
11 2.110622602834 c(144) 0.5E-08<br />
12 2.170616908700 c(157) 0.4E-08<br />
13 0.449799127363 c(170) 0.4E-07<br />
14 0.612654661780 c(183) + c(1) 0.4E-07<br />
15 −1.684453740441 c(196) 0.1E-07<br />
16 0.400312170289 c(209) 0.2E-07<br />
17 −2.868395110060 c(222) 0.1E-07<br />
18 −1.931595991172 c(235) 0.2E-07<br />
19 −0.591212766919 c(248) 0.1E-07<br />
20 0.792151138999 c(261) 0.9E-08<br />
21 −1.717242193922 c(274) 0.3E-07<br />
22 1.369169138277 c(287) 0.2E-07<br />
23 2.007854712832 c(300) 0.8E-09<br />
24 0.447826147902 c(313) 0.1E-07<br />
25 3.051006373828 c(326) 0.4E-08<br />
26 −0.032419986064 c(339) 0.6E-08<br />
27 1.255081531820 c(352) + a(2) 0.2E-07<br />
28 −0.707047087424 c(365) 0.3E-07<br />
29 1.272283355260 c(378) 0.1E-07<br />
30 −0.184187214400 c(391) 0.2E-07<br />
a This quotient is deduced from formula (2.14) or<br />
(2.15) on p. 79.<br />
99
Table 2.4: Eigenvalues for M(PSL(2,Z),1,v 2 η)<br />
R H(y1,y2) True error a<br />
2.38549209578045 1E-12 1E-15 b<br />
3.66240686698667 1E-11<br />
4.77098419156091 1E-13 1E-14 b<br />
5.77698688078694 6E-12<br />
6.64285171613711 1E-11<br />
7.15647628734173 1E-11 4E-13 b<br />
7.82634704540775 1E-13<br />
8.66620831896793 7E-14<br />
9.45156176783224 7E-12<br />
9.54196838312186 2E-13 6E-14 b<br />
10.21802876776059 3E-13<br />
10.65897262920241 2E-12<br />
11.27526358349387 2E-13<br />
11.92746047890219 7E-11 5E-14 b<br />
12.15792337422149 7E-13<br />
12.55403509998720 1E-13<br />
13.00123950642372 9E-13<br />
13.67542640643589 2E-13<br />
13.71353384358095 1E-12<br />
14.31295257468268 1E-12 1E-14 b<br />
14.47039277253940 1E-12<br />
15.03845367358721 2E-13<br />
15.39856858348441 1E-12<br />
15.85705128717333 3E-10<br />
16.14536205734475 3E-11<br />
16.45061260131967 4E-11<br />
16.69844467046304 4E-12 1E-13 a<br />
16.93043847896222 4E-15<br />
17.51562192885174 2E-10<br />
17.59022138305996 1E-10<br />
18.13826107340244 3E-11<br />
18.32637702205910 4E-11<br />
18.76341585146817 1E-11<br />
a For CM-forms, the true error is computed with<br />
respect to the eigenvalue Rk = 2πk<br />
ln(η0) , where<br />
η0 = 7 + 2 √ 12.<br />
b These forms correspond to CM-forms.<br />
100
Table 2.5: Fourier coefficients for<br />
f1,2 ∈ M(Γ0(4), 1<br />
2 ,6.889875675945)<br />
Fourier coefficients for f1 ∈ V + , observe that a(n) = 0 for n ≡ 2,3 mod 4<br />
n a(n)<br />
4 0.84219769675471<br />
5 0.18355821406443<br />
8 0.56907998524429<br />
9 −0.33045049673565<br />
12 −0.41296169213831<br />
13 0.60153537988057<br />
16 0.30482066289397<br />
17 −0.88689598690620<br />
20 0.41418282092059<br />
21 0.50212917023175<br />
23 −0.00000000000110<br />
24 −1.04429548341249<br />
25 0.28984678984391<br />
n a(−n)<br />
|c(4)c(9) − c(36)| = 0.2E − 08<br />
3 1.01825299171456<br />
4 2.18968040385979<br />
7 2.06305218095270<br />
8 −1.17157116610978<br />
11 −1.02718719694121<br />
12 2.29759751514531<br />
15 −4.08935474990375<br />
16 3.39248165496032<br />
19 −1.31804633824673<br />
20 1.87725570455517<br />
23 −2.22265197818114<br />
24 0.58816620330140<br />
Fourier coefficients for f2 ∈ V + , observe that a(1) = 0, and we set c(2) = 1<br />
n a(n) n a(n)<br />
0 0.000000000000 19 −0.936283350934<br />
1 0.000000000000 20 0.192087703124<br />
2 1.000000000000 21 1.247834928335<br />
3 −0.725665465042 22 0.411443268212<br />
4 −0.710754741008 23 −0.018564690418<br />
5 0.456158224759 24 −1.297582830232<br />
6 −1.835059236817 25 0.000000000000<br />
7 0.481289183972 26 −0.610656711780<br />
8 0.707106781187 27 −0.179166638197<br />
9 0.000000000000 28 0.340322845698<br />
10 −0.651049038069 29 0.001563849679<br />
11 −0.470914040036 30 1.462745418892<br />
12 −0.513122971204 31 0.400763051265<br />
13 1.494868058150 32 0.095523702475<br />
14 0.968484734380 33 0.000000000000<br />
15 −0.945563574521 34 −0.879782299796<br />
16 −1.101175502961 35 −1.833603623066<br />
17 0.000000000000 36 0.234869257223<br />
18 0.824250041644<br />
101
Table 2.6: Fourier coefficients for f ∈ M Γ0(4), 1<br />
2 ,R<br />
102<br />
R = 4.461438243496<br />
n a(n)<br />
0 0.00000000000000<br />
1 1.00000000000000<br />
2 0.63334968449036<br />
3 0.63517832947402<br />
4 −0.70710678118667<br />
5 −0.00000000000003<br />
6 1.28035706400142<br />
7 −0.90756258916698<br />
8 −0.44784585676555<br />
9 0.52643872643776<br />
10 −0.57763498966972<br />
11 1.12485377915641<br />
12 −0.44913890403389<br />
13 0.00000000000001<br />
14 0.48078071833327<br />
15 −1.58539012005784<br />
16 0.50000000000015<br />
17 −0.14882069214483<br />
18 1.06474902295605<br />
19 0.21268916863632<br />
20 0.00000000000003<br />
21 0.00000000000002<br />
22 −1.56248056455209<br />
23 0.85478501960318<br />
24 −0.90534916229569<br />
25 0.45696099733973<br />
36 −0.37224839333969<br />
|c(4)c(9) − c(36)| = 4E − 12<br />
R = 6.046497437542<br />
n a(n)<br />
0 0.000000000000<br />
1 0.000000000000<br />
2 1.000000000000<br />
3 1.770795863371<br />
4 0.000000000029<br />
5 1.331470494003<br />
6 −0.749395507674<br />
7 0.074369313625<br />
8 0.707106781209<br />
9 −0.000000000016<br />
10 −1.214451367832<br />
11 0.620756243833<br />
12 1.252141763204<br />
13 −1.123686021586<br />
14 −0.711286031630<br />
15 0.964706032413<br />
16 −0.000000000112<br />
17 −0.000000000108<br />
18 −0.128644484609<br />
19 −0.499664871594<br />
20 0.941491814843<br />
21 −0.447011950327<br />
22 −0.805501416928<br />
23 1.236716356721<br />
24 −0.529902643583<br />
25 0.000000008756<br />
36 −0.000000000168<br />
288 −0.064322242377<br />
|c(2 · 3 2 )c(2 · 4 2 ) − c(2 · 12 2 )| = 8E − 11
Table 2.7: Supplemental table <strong>of</strong> Fourier coefficients for M(Γ0(2),0,R)<br />
R 8.92287648699174<br />
n A(n)<br />
2 −0.70710678118654<br />
3 1.10378899562734<br />
4 0.49999999999993<br />
5 0.90417459283958<br />
6 −0.78049668380711<br />
7 0.82934246755499<br />
8 −0.35355339059330<br />
9 0.21835014686776<br />
10 −0.63934798597339<br />
R 13.77975135189073<br />
(even wrt z ↦→ − 1 2z )<br />
n A(n)<br />
2 2.96351804031448<br />
3 0.24689977245401<br />
4 3.59139177031902<br />
5 0.73706038534834<br />
6 0.73169192981688<br />
7 −0.26142007576500<br />
8 2.60064131148226<br />
9 −0.93904050235826<br />
10 2.18429174878080<br />
R 12.0929948750786<br />
n A(n)<br />
2 0.70710678118655<br />
3 −0.70599475399569<br />
4 0.49999999999999<br />
5 −0.79974825694039<br />
6 −0.49921367803249<br />
7 −1.71337067862845<br />
8 0.35355339059328<br />
9 −0.50157140733054<br />
10 −0.56550741572467<br />
R 13.77975135189073<br />
(odd wrt z ↦→ − 1 2z )<br />
n A(n)<br />
2 0.13509091556820<br />
3 0.24689977245398<br />
4 −0.79070303958101<br />
5 0.73706038534830<br />
6 0.03335391631439<br />
7 −0.26142007576538<br />
8 −1.36013067551284<br />
9 −0.93904050236089<br />
10 0.09957016228575<br />
103
Table 2.8: Comparison <strong>of</strong> Fourier coefficients A(n) computed directly for<br />
M(Γ0(N),0,R) (N = 1,2), vs Â(n) computed on M Γ0(4), 1 1<br />
2 , 2R and using<br />
(2.20).<br />
n Â(n) A(n) |A(n) − Â(n)|<br />
f ∈ M(Γ0(2),0,8.922876486992) (t = 1)<br />
2 −0.70710678118665 −0.707106781186 0.6E-12<br />
3 1.10378899562739 1.103788995627 0.4E-12<br />
5 0.90417459283969 0.904174592840 0.3E-12<br />
f ⊆ M(Γ0(1),0,13.779751351891) (t = 1)<br />
2 1.54930447794126 1.549304477941 0.7E-12<br />
3 0.24689977245398 0.246899772454 0.3E-12<br />
4 1.40034436536892 1.400344365369 0.2E-12<br />
5 0.73706038534387 0.737060385348 0.4E-11<br />
6 0.38252292109716 0.382522923066 0.2E-08<br />
f ∈ M(Γ0(1),0,13.779751351891) (t = 2)<br />
3 0.24689977245437 0.246899772454 0.8E-13<br />
5 0.73706038535004 0.737060385348 0.2E-11<br />
7 −0.26142007624377 −0.261420075765 0.5E-09<br />
9 −0.93904050238904 −0.939040502362 0.3E-10<br />
f ∈ M(Γ0(2),0,12.092994875079) (t = 2)<br />
3 −0.70599475379863 −0.705994753996 0.2E-09<br />
5 −0.79974825694696 −0.799748256940 0.7E-11<br />
7 −1.71337067860377 −1.713370678628 0.2E-10<br />
9 −0.50157140750090 −0.501571407330 0.2E-09<br />
In segment 3, the calculation is based on (2.20) and the second portion <strong>of</strong> Table 2.5.<br />
104
Table 2.9: Comparison <strong>of</strong> Fourier coefficients for weights k =9.044605824E-08 and<br />
k = 0 near an “avoided crossing”.<br />
Corresponds to the cusp form<br />
k<br />
R<br />
c(2)<br />
c(3)<br />
c(4)<br />
c(5)<br />
c(6)<br />
9.0446058240E-08<br />
13.77975135189074<br />
1.54930480559976<br />
0.24689988546553<br />
1.40034433555250<br />
0.73706067260516<br />
0.38252272069428<br />
Corresponds to the Eisenstein series<br />
k<br />
R<br />
c(2)<br />
c(3)<br />
c(4)<br />
c(5)<br />
c(6)<br />
9.0446058240E-08<br />
13.77975135138225<br />
−2.06525760334129<br />
−1.72891679536648<br />
2.97153986917404<br />
−2.02747287754385<br />
3.41008729668221<br />
0<br />
13.77975135189074<br />
1.54930447794069<br />
0.24689977245411<br />
1.40034436536841<br />
0.73706038534787<br />
0.38252292306557<br />
0<br />
13.77975135138225<br />
−1.98398933080188<br />
−1.68449330640991<br />
2.93621366473571<br />
−1.96531634618530<br />
3.34201674772446<br />
Difference<br />
0.3E-06<br />
0.1E-06<br />
0.1E-06<br />
0.2E-06<br />
0.2E-06<br />
Difference<br />
0.8E-01<br />
0.4E-01<br />
0.4E-01<br />
0.6E-01<br />
0.7E-01<br />
The coefficients for the Eisenstein series at k = 0 were computed using (2.19), i.e.:<br />
c(2) = 2cos(Rln2)<br />
c(3) = 2cos(Rln3)<br />
c(4) = 1 + 2cos(Rln4)<br />
c(5) = 2cos(Rln5)<br />
c(6) = 2cos(Rln6) + 2cos(R(ln3 − ln2))<br />
Table 2.10: Comparison <strong>of</strong> Fourier coefficients for weights k =9.044605824E-08 and<br />
k = 0 “far” from an ”avoided crossing”. The weight 0 coefficients were computed<br />
using the formulas in Table 2.9.<br />
k 9.0446058240E-08 0<br />
Difference<br />
R<br />
c(2)<br />
c(3)<br />
c(4)<br />
c(5)<br />
c(6)<br />
13.62696884857618<br />
−1.99957085683552<br />
−1.48069687587703<br />
2.99828354611637<br />
−1.99647405201235<br />
2.96075820067617<br />
13.62696884857618<br />
−1.99957081810438<br />
−1.48069680342062<br />
2.99828345661464<br />
−1.99647406885962<br />
2.96075811858031<br />
0.4E-07<br />
0.7E-07<br />
0.7E-07<br />
0.2E-07<br />
0.8E-07<br />
105
3 Computation <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong> on<br />
Non-congruence Subgroups <strong>of</strong> the Modular<br />
Group<br />
3.1 Introduction<br />
Previously, in Chapter 1 we considered the computation <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong><br />
on certain subgroups <strong>of</strong> PSL(2,Z), the so called Hecke congruence subgroups,<br />
and in Chapter 2 we extended this work to the case <strong>of</strong> arbitrary real weight<br />
and non-trivial multiplier system. In this chapter we will see that the methods<br />
detailed in the previous chapters also work for non-congruence subgroups.<br />
There is a general belief that there exist no (or very few) <strong>Maass</strong> <strong>waveforms</strong><br />
on a generic Fuchsian group. This is indicated by the results <strong>of</strong> Phillips and<br />
Sarnak, cf. [80, 81]. Recent results (cf. [30]) indicate that there are continuous<br />
families <strong>of</strong> groups, on which there exists (at least) one <strong>Maass</strong> waveform.<br />
These families seem to be “arbitrary” in the sense that they are not arithmetic<br />
and possess no obvious symmetries.<br />
If a group Γ has <strong>Maass</strong> <strong>waveforms</strong>, then these descend to all subgroups <strong>of</strong><br />
Γ. As a <strong>Maass</strong> waveform on the subgroup we will call it an oldform. We will<br />
use the term newform to denote the <strong>Maass</strong> <strong>waveforms</strong> on a group G which<br />
are not from a supergroup G1 (G G1 ⊆ PSL(2,Z)). This is an analog <strong>of</strong><br />
the well-known concepts <strong>of</strong> oldforms and newforms for congruence groups<br />
(cf. [5]).<br />
The groups which we will study here are all subgroups <strong>of</strong> the modular<br />
group, PSL(2,Z), and hence arithmetic, but even in this case the existence<br />
or nonexistence <strong>of</strong> newforms is in general not known.<br />
The existence <strong>of</strong> an infinite number <strong>of</strong> newforms is known on congruence<br />
subgroups and cycloidal subgroups (having only one cusp), and other subgroups<br />
which possess certain symmetries (e.g. a reflectional symmetry which<br />
preserves cusp classes). The results presented in this thesis indicate that there<br />
are no other examples <strong>of</strong> subgroups <strong>of</strong> index ≤ 11 which have newforms.<br />
We will give a general method that produces all subgroups with a given<br />
index in PSL(2,Z), and then we will see how to adapt the previous algorithm<br />
for computation <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong> (cf. Section 1.3) to such a group, and<br />
finally we will provide examples <strong>of</strong> the experimental results.<br />
The author would also like to express gratitude to Andreas Strömbergsson<br />
107
for very helpful discussions, especially regarding Proposition 3.2.1.<br />
3.2 Subgroups <strong>of</strong> the Modular Group<br />
Remember that the modular group, PSL(2,Z), is defined as<br />
<br />
a b ad<br />
PSL(2,Z) =<br />
− bc = 1,a,b,c,d ∈ Z ,<br />
c d<br />
with a (closed) fundamental domain<br />
<br />
F1 = z = x + iy ∈ H <br />
<br />
1<br />
|z| ≥ 1, |x| ≤ .<br />
2<br />
For a given positive integer N the principal congruence subgroup, Γ(N), is<br />
defined by<br />
<br />
a b<br />
Γ(N) =<br />
∈ PSL(2,Z)<br />
c d<br />
<br />
c ≡ b ≡ 0 mod N,a ≡ d ≡ 1 mod N ,<br />
and any subgroup <strong>of</strong> PSL(2,Z) containing some Γ(N) is called a congruence<br />
subgroup. If G ⊆ PSL(2,Z), and N is the smallest integer such that Γ(N) ⊆ G<br />
then we say that N is the level <strong>of</strong> G. A particularly interesting and well understood<br />
class <strong>of</strong> congruence subgroups are the Hecke congruence subgroups,<br />
Γ0(N),<br />
<br />
a b<br />
Γ0(N) =<br />
∈ PSL(2,Z)<br />
c d<br />
<br />
c ≡ 0 mod N .<br />
Presentations, constructions, modular forms and spectral theory are more or<br />
less well known and understood topics on congruence groups in general and<br />
on Hecke congruence groups in particular, cf. e.g. [83, 24, 76, 84, 89, 51, 5,<br />
62, 12].<br />
Of the other types <strong>of</strong> subgroups, the cycloidal groups have been studied<br />
for a long time by Petersson, Millington, etc. (cf., e.g. [78, 79, 66, 67]), and<br />
other specific types <strong>of</strong> subgroups have also been studied by various people<br />
(cf., e.g. [22, 23, 26]). The subject <strong>of</strong> interest to these investigations however<br />
has mostly been in presenting and constructing the groups. The present<br />
knowledge <strong>of</strong> the theory <strong>of</strong> modular forms and spectral theory on these groups<br />
is very limited (cf., e.g. [7, 105, 106, 100]).<br />
It is a well-known fact that PSL(2,Z) is generated by the elements S : z ↦→<br />
z + 1, and E : z ↦→ − 1<br />
z , and that the only relations are E2 = R 3 = Id, where<br />
108
R = ES. In terms <strong>of</strong> matrices we have<br />
<br />
S =<br />
1<br />
0<br />
1<br />
1<br />
, E =<br />
0<br />
1<br />
−1<br />
0<br />
, and R =<br />
0<br />
1<br />
−1<br />
1<br />
.<br />
Let Γ ⊆ PSL(2,Z) be a subgroup <strong>of</strong> finite index µ with closed fundamental<br />
domain F in H. Suppose that F has e2 and e3 inequivalent elliptic vertices <strong>of</strong><br />
order 2 and 3 respectively and κ inequivalent parabolic vertices (cusps). The<br />
genus g <strong>of</strong> the quotient orbifold, Γ\H, is given by<br />
g = 1 + 1<br />
2<br />
<br />
µ 1<br />
− κ −<br />
6 2 e2 − 2<br />
3 e3<br />
<br />
, (3.1)<br />
(cf. [67, (1.1)]) and we say that the type <strong>of</strong> Γ is (µ; g,κ,e2,e3). If µ j, j =<br />
1,...,κ are the widths <strong>of</strong> the cusps <strong>of</strong> F then µ = µ1 +···+ µκ. (This formula<br />
is easily verified by viewing F as µ copies <strong>of</strong> F1, the standard fundamental<br />
domain for PSL(2,Z),since then µ j is exactly the number <strong>of</strong> images <strong>of</strong> F1<br />
whose vertex at infinity belongs to the cusp class number j.) The generalized<br />
level <strong>of</strong> Γ is defined as the least common multiple <strong>of</strong> µ j<br />
κ j=1<br />
. It is known that<br />
if Γ is a congruence subgroup then the generalized level is equal to the level<br />
(cf. [104]).<br />
Theorem 3.1. (Millington [67])<br />
For every set <strong>of</strong> integers µ > 0, κ > 0, e2 ≥ 0, e3 ≥ 0, g ≥ 0 consistent with<br />
(3.1) there exists a subgroup <strong>of</strong> the modular group <strong>of</strong> type<br />
(µ; g,κ,e2,e3).<br />
3.2.1 Permutations and subgroups <strong>of</strong> PSL(2,Z)<br />
There is a convenient way to represent any subgroup G <strong>of</strong> PSL(2,Z) <strong>of</strong> finite<br />
index µ in terms <strong>of</strong> a pair <strong>of</strong> permutations <strong>of</strong> a set <strong>of</strong> µ elements. Geometrically<br />
these permutations can be viewed as describing the side pair identifications<br />
in a fundamental domain for G formed by µ distinct PSL(2,Z)-translates<br />
<strong>of</strong> F1 (cf. Remark 3.2.1 for a precise description <strong>of</strong> this).<br />
For a positive integer µ we use Sµ to denote the group <strong>of</strong> permutations <strong>of</strong><br />
µ-letters (e.g. {1,2,..., µ}). The notation here is that the action <strong>of</strong> a permutation<br />
π ∈ Sµ is from the left, i.e. for π,σ ∈ Sµ we write πσ( j) = π (σ( j)).<br />
A k−cycle is a permutation π ∈ Sµ with the property that there exist k distinct<br />
elements x1,x2,...,xk ∈ {1,2,..., µ} such that π(xi) = xi+1, i = 1,...,k−<br />
1 and π(xk) = x1. We will use the following notation: π = (x1x2 ···xk). Note<br />
that with this notation, (x1x2 ···xk) = (x2x3 ···xkx1) = ... .<br />
A general permutation π is completely described by either listing its values<br />
109
on all elements, i.e. {π( j)} µ<br />
j=1 or by listing all cycles, i.e.<br />
with the sets x j1,xj2,...,xjk j<br />
π = (x11 ···x1k1 )(x21 ···x2k2 )···(xn1 ···xnkn ),<br />
( j = 1,2,...,n) pairwise disjoint.<br />
Definition 3.2.1. If σE,σR ∈ Sµ we say that the pair (σE,σR) is legitimate if<br />
• σ 2 E = σ 3 R = 1, and<br />
• the group generated by σE and σR, 〈σE,σR〉, is transitive on {1,2,..., µ}.<br />
Two legitimate pairs (σE,σR) and (σ ′ E ,σ′ R ) are said to be equivalent, denoted<br />
by (σE,σR) ∼ (σ ′ E ,σ′ R ), if there exists a permutation π ∈ Sµ such that<br />
π −1 σEπ = σ ′ E, and π −1 σRπ = σ ′ R.<br />
If we also have π(1) = 1, we say that the pairs are equivalent (mod 1), which<br />
we denote by (σE,σR) ∼1 (σ ′ E ,σ′ R ).<br />
We have the following theorem.<br />
Theorem 3.2. (Millington [67, thm. 2])<br />
There is a one-to-one correspondence between equivalence classes (mod 1)<br />
(i.e. with respect to ∼1) <strong>of</strong> legitimate pairs (σE,σR) in Sµ and subgroups G<br />
<strong>of</strong> index µ in PSL(2,Z). Furthermore, G has type (µ; g,κ,e2,e3) and cusp<br />
widths µ j<br />
κ j=1<br />
if and only if<br />
• σE has e2 1−cycles (fixed elements),<br />
• σR has e3 1−cycles (fixed elements), and<br />
• σS = σRσE has κ disjoint cycles <strong>of</strong> lengths µ j, 1 ≤ j ≤ κ<br />
(and g is given by (3.1)).<br />
Remark 3.2.1. The subgroup, G, <strong>of</strong> PSL(2,Z) corresponding to the legitimate<br />
pair (σE,σR) is defined by<br />
G = {γ ∈ PSL(2,Z)|h(γ)(1) = 1},<br />
where h : PSL(2,Z) → Sµ is the anti-homomorphism (i.e. h(AB) = h(B)h(A),<br />
for all A,B ∈ PSL(2,Z) and h(Id) = Id) defined by h(E) = σE and h(R) = σR.<br />
In the implementation <strong>of</strong> the general pullback algorithm (cf. Section 1.3.2) we<br />
use the fact that a set <strong>of</strong> right coset representatives <strong>of</strong> G in PSL(2,Z) is given<br />
by µ<br />
Vj , where<br />
j=1<br />
h(Vj)(1) = j, j = 1,..., µ.<br />
Hence a fundamental domain for G\H is given by F = ⊔ µ<br />
j=1Vj (F1). One<br />
<br />
checks from the definitions that, for all j, h<br />
(1) = 1 so that for all<br />
<br />
VjSV −1<br />
h(S)( j)<br />
j, VjSV −1<br />
h(S)( j) ∈ G. This means that VjS(F1) can be mapped to Vh(S)( j) (F1) by<br />
a map in G. Let b be the geodesic ei π 3 + i[0,∞) so that b and S−1 (b) are two<br />
110
<strong>of</strong> the three sides <strong>of</strong> the geodesic polygon F1. Since Vj (F1) ∩VjS(F1) = Vj(b)<br />
it follows that there is an identification map in G which glues the side Vj(b)<br />
<strong>of</strong> Vj (F1) to the side V h(S)( j)S −1 (b) <strong>of</strong> V h(S)( j) (F1). Similarly, if b ′ denotes<br />
the side <strong>of</strong> the polygon F1 which contains the point i, then the side Vj(b ′ ) <strong>of</strong><br />
Vj (F1) is glued to the side V h(E)( j)(b ′ ) (provided with the “opposite direction”)<br />
<strong>of</strong> V h(E)( j) (F1).<br />
For the pullback procedure, we need to find the coset <strong>of</strong> the map T −1 , where<br />
T gives the pullback into F1, i.e. we need to find h(T −1 )(1). To do that, as<br />
we go through with the “flip-flop” through the generators E and S, in each<br />
step we both multiply the appropriate map (from the left) and the inverse <strong>of</strong> the<br />
corresponding permutation (from the left). When we are done, we have both T<br />
and h(T −1 ) and can thus determine the coset <strong>of</strong> T −1 . (The G-pullback is then<br />
given by the map V h(T −1 )(1)T , cf. Chapter 1, p. 43.)<br />
(In her thesis, Millington appears to get a connected polygon with identified<br />
sides by linking the permutations with the Poincaré fundamental polygon theorem<br />
in an appropriate way. See [66, pro<strong>of</strong> <strong>of</strong> thm. 1] for the cycloidal case.<br />
In our approach, we do not need a connected polygon and simply proceed<br />
algebraically by way <strong>of</strong> [67, thm. 1].)<br />
Theorem 3.3. Let (σE,σR) correspond to G and (σ ′ E ,σ′ R ) to G′ . Then G and<br />
G ′ are conjugate in PSL(2,Z) iff (σE,σR) ∼ (σ ′ E ,σ′ R ).<br />
Pro<strong>of</strong>. Let h and h ′ denote the anti-homomorphisms corresponding to (σE,σR)<br />
and (σ ′ E ,σ′ R ). Suppose that A ∈ SL(2,Z). We then know that<br />
AGA −1 = A γ ∈ PSL(2,Z) h(γ)(1) = 1 A −1<br />
= AγA −1 ∈ PSL(2,Z) h(γ)(1) = 1 <br />
= γ ∈ PSL(2,Z) h(A)h(γ)h(A) −1 (1) = 1 <br />
= γ ∈ PSL(2,Z) h ′′ (γ)(1) = 1 ,<br />
where h ′′ (γ) = h(A)h(γ)h(A) −1 ∈ Sµ corresponds to the legitimate pair (σ ′′<br />
E ,σ′′ R )<br />
(here σ ′′<br />
E = h(A)σEh(A) −1 and σ ′′<br />
R = h(A)σRh(A) −1 ). Suppose that G ′ = AGA−1 .<br />
This is equivalent with<br />
<br />
γ ∈ PSL(2,Z) h ′′<br />
(γ)(1) = 1 = γ ∈ PSL(2,Z) h ′<br />
(γ)(1) = 1 ,<br />
), which<br />
means that there exists a π ∈ Sµ with π(1) = 1 such that π−1 (σ ′ E ,σ′ R )π =<br />
and by theorem 3.2 we must have then have (σ ′′<br />
E ,σ′′<br />
R ) ∼1 (σ ′ E ,σ′ R<br />
(σ ′′<br />
E ,σ′′<br />
R ) and if we set τ = h(A)−1 π −1 we have τ −1 (σE,σR)τ = (σ ′ E ,σ′ R )<br />
where now τ(1) = h(A) −1 (1). Hence (σE,σR) ∼ (σ ′ E ,σ′ R ) .<br />
Conversely, suppose that τ ∈ Sµ and τ−1 (σE,σR)τ = (σ ′ E ,σ′ R ). Then, for<br />
any A ∈ SL(2,Z) such that h(A) −1 (1) = τ(1), we have<br />
G ′ = AGA −1 .<br />
111
This is easily seen by comparing h ′ (γ) = τ −1 h(γ)τ and h ′′ (γ) = h(A)h(γ)h(A) −1<br />
for γ ∈ PSL(2,Z).<br />
Remark 3.2.2. If G ′ = AGA−1 , A ∈ SL(2,Z) then if j = h(A) −1 (1) and σ j =<br />
(1 j), the pair (σ ′ E ,σ′ R ) defined by<br />
′<br />
σ E,σ ′ −1<br />
R = σ j (σE,σR)σj<br />
is easily seen to correspond to the group G ′ . Hence we see that all conjugates<br />
<strong>of</strong> G are obtained by conjugating the corresponding pair (σE,σR) by σ j for<br />
j = 2,..., µ.<br />
Definition 3.2.2. If G is a subgroup <strong>of</strong> PSL(2,Z) then we use (G) to denote<br />
the set <strong>of</strong> PSL(2,Z)-conjugates <strong>of</strong> G, (G) = AGA −1 A ∈ PSL(2,Z) .<br />
It is clear now that if (σE,σR) is a legitimate pair corresponding to G, then<br />
we get all groups in (G) by conjugating the pair (σE,σR) with all σ j = (1 j),<br />
j = 2,..., µ.<br />
Remark 3.2.3. We know that conjugate groups have the same spectrum, hence<br />
we only need to investigate one G in the set (G).<br />
The reflection operator J : z ↦→ −z, which we also represent by the matrix<br />
<br />
J =<br />
−1<br />
0<br />
0<br />
1<br />
,<br />
acts on E and R as<br />
E ∗ = JEJ = E, and R ∗ = JRJ = ER −1 E = ER 2 E.<br />
Hence, if G is represented by the legitimate pair (σE,σR), the group G∗ = JGJ<br />
corresponds to the legitimate pair<br />
<br />
.<br />
(σ ∗ E,σ ∗ R) = σE,σEσ 2 RσE<br />
We also observe that G ∗ has the same type as G and the spectrum <strong>of</strong> G and<br />
G ∗ are equal. In fact, it is obvious that if f is a function on G\H, then f |J is a<br />
function on G ∗ \H.<br />
Remark 3.2.4. Since one can easily compute the pair corresponding to G ∗<br />
from the pair corresponding to G we do not list (G ∗ ) separately in Table 3.1.<br />
But for each conjugacy class (G) we list the conjugacy class <strong>of</strong> (G ∗ ). Clearly<br />
either (G ∗ ) = (G) or (G ∗ ) = (G). If (G ∗ ) = (G) we can in some cases use<br />
the reflection to prove existence <strong>of</strong> newforms (cf Proposition 3.2.1 and Remark<br />
3.2.1).<br />
112
We will now give a precise statement about a sufficient condition that newforms<br />
exist on a subgroup <strong>of</strong> PSL(2,Z). This proposition gives an explanation<br />
for all newforms on noncongruence subgroups which we have found so far.<br />
Proposition 3.2.1. Suppose that G corresponds to the legitimate pair (σE,σR),<br />
and that JGJ = A −1 GA for some A ∈ SL(2,Z). Let P = {[p1],...,[pκ]} be the<br />
set <strong>of</strong> G-equivalence classes <strong>of</strong> cusps <strong>of</strong> G. Set α = AJ and assume that α 2 ∈ G<br />
and that α preserves all cusp classes. Then L 2 (G\H) splits into an “α-even”<br />
and “α-odd” part, and the α-odd part is spanned by <strong>Maass</strong> <strong>waveforms</strong>.<br />
Pro<strong>of</strong>. Extending [94, I, §§1-2] to PGL(2,R) (cf. Chapter 1, p. 21) we see that<br />
α gives us a modular correspondence (with d = 1). Since the cusp classes are<br />
preserved by α we can use [94, lemma 2.6] (extended to PGL(2,R)) to show<br />
that there exist positive constants γ1,...,γκ such that<br />
E j (αz,s) ≡ γ s jEj (z,s), for j = 1,...,κ, (3.2)<br />
where E j (z,s) is the Eisenstein series for G\H associated with [p j]. Since<br />
α2 <br />
∈ G we have E j α2z,s ≡ E j (z,s), and hence, in fact γ1 = γ2 = ··· = γκ =<br />
1. L2 (G\H) splits into an “even” and an “odd” part by the action <strong>of</strong> α;<br />
L 2 (G\H) = L 2 + (G\H) ⊕ L 2 − (G\H),<br />
(an orthogonal sum, since the action <strong>of</strong> α is self adjoint, by an argument similar<br />
to [38, pp. 470-472] but easier) where<br />
L 2 ± (G\H) = f ∈ L 2 (G\H) f (αz) ≡ ± f (z) .<br />
It is known that L 2 (G\H) has a spectral decomposition as an orthogonal sum<br />
L 2 (G\H) = C ⊕D, where C (“the continuous part”) is spanned by the Eisenstein<br />
series, and D is spanned by <strong>Maass</strong> <strong>waveforms</strong>. By (3.2) (where γ j = 1)<br />
we have C ⊂ L 2 + (G\H). Hence L 2 − (G\H) ⊂ D, i.e. L 2 − (G\H) is spanned<br />
by <strong>Maass</strong> <strong>waveforms</strong>. It will be seen momentarily (cf. Remark 3.2.5) that, in<br />
many cases, the space L 2 − (G\H) can be seen to be infinite-dimensional.<br />
Remark 3.2.5. In each case which we have investigated and for which Prop. 3.2.1<br />
applies, the group G does not allow any nontrivial supergroups G ′ (G G ′ <br />
PSL(2,Z)). Hence, in these cases, Prop. 3.2.1 very easily implies the existence<br />
<strong>of</strong> newforms for G.<br />
Indeed, let V ⊂ H be a small disk such that γV ∩V = /0 for all γ ∈ GL(2,Z);<br />
write PSL(2,Z) = ⊔n j=1Gγ j, and let f0 be any function {1,...,n} → C with<br />
∑ n j=1 f0( j) = 0, f0 ≡ 0. Define f : H → C by<br />
⎧<br />
⎪⎨ f0( j), if z ∈ Gγ jV,<br />
f (z) = − f0( j), if z ∈ Gαγ<br />
⎪⎩<br />
jV,<br />
0, otherwise.<br />
113
Then f is G-invariant and f ∈ L 2 − (G\H) (using αG = Gα = GαG). Further-<br />
more, if f1 ∈ L2 (PSL(2,Z)\H) then<br />
<br />
<br />
f f1dµ =<br />
G\H<br />
=<br />
=<br />
=<br />
= 0.<br />
n <br />
∑ + f f1dµ<br />
j=1 γ jV αγ jV<br />
n <br />
n <br />
∑ f0( j) f1dµ − ∑ f0( j) f1dµ<br />
j=1 γ jV j=1 αγ jV<br />
n <br />
n <br />
∑ f0( j) f1dµ − ∑ f0( j) f1dµ<br />
j=1 V j=1 αV<br />
n<br />
f1dµ − f1dµ ∑ f0( j)<br />
V<br />
αV j=1<br />
(We used αγ jV = αγ jα −1 αV , where αγ jα −1 ∈ PSL(2,Z)). Hence f is orthogonal<br />
to the full oldform space (by our assumption on G). Hence, expanding f<br />
as an L 2 -sum <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong> (using Prop. 3.2.1), all non-vanishing terms<br />
must be newforms. And by varying V , we see that the number <strong>of</strong> newforms is<br />
infinite.<br />
To use the above proposition we must find a permutation τ which conjugates<br />
the pair (σE,σR) into (σ ∗ E ,σ∗ R ). Then we must find an A ∈ PSL(2,Z) with<br />
h(A)(1) = τ(1). And finally we set α = JA and see if α2 ∈ G, and if so, we must<br />
also see how the various cusp classes transform under α. To be certain that<br />
we actually find newforms we must also investigate the possible supergroups<br />
between G and PSL(2,Z).<br />
There are two special cases, in which we can see the exact form <strong>of</strong> α and<br />
only have to investigate the permutation <strong>of</strong> the cusp classes and possible supergroups.<br />
Example 3.2.1. If we can take A as a power <strong>of</strong> S : A = S k . Then α : x + iy ↦→<br />
−x + k + iy, i.e. a reflection in the line x = k<br />
2 and it is clear that α2 = Id ∈ G.<br />
Example 3.2.2. If we can take A = E (i.e. we can do that if E(1) = 2 and<br />
σR ∼1 σ 2 R , which is always true if e2 = 0 and e3 ≥ 1). Then α = EJ and<br />
α : z ↦→ 1<br />
z , i.e. α is a reflection in the circle |z| = 1 and α2 = Id ∈ G.<br />
Remark 3.2.6. Consider a group G ⊆ PSL(2,Z), which has cusp width µ1 = L<br />
at ∞, and where J acts as a reflection in the line x = k<br />
2 , i.e. α : z ↦→ k − z.<br />
Suppose that f is a <strong>Maass</strong> waveform on G with α-eigenvalue ε = ±1, i.e.<br />
f (αz) = ε f (z). We know that the Fourier series <strong>of</strong> f at ∞ can be written as<br />
<br />
nx<br />
<br />
,<br />
L<br />
114<br />
f (z) = ∑ c(n)<br />
n=0<br />
√ yKiR(2π|n|y)e
where e(x) = e2πix . If we apply α we get<br />
f (αz) = ∑ c(n)<br />
n=0<br />
√ =<br />
<br />
2π|n|y n(−x + k)<br />
yKiR e<br />
L<br />
L<br />
<br />
nk √yKiR<br />
2π|n|y −nx<br />
∑ c(n)e<br />
e<br />
n=0 L<br />
L L<br />
<br />
−nk √yKiR<br />
2π|n|y<br />
<br />
nx<br />
<br />
e ,<br />
L<br />
L L<br />
= ∑ c(−n)e<br />
n=0<br />
hence if f (αz) = ε f (z) we must have c(−n) = εc(n)e <br />
nk<br />
L , for all n = 0, and<br />
in particular if we set c(1) = 1 we get<br />
<br />
e<br />
c(−1) =<br />
πi<br />
L (2k) , ε = 1, (the even case)<br />
e πi<br />
L (2k±L) , ε = −1, (the odd case).<br />
We can thus determine if a given cusp form f is <strong>of</strong> even or odd type with respect<br />
to α by looking at the c(−1) coefficient. Cf. Tables 3.5 and 3.6.<br />
We will now consider some explicit examples where we can take A = S k as<br />
in Example 3.2.1. See Table 3.1 for definition <strong>of</strong> these groups.<br />
Example 3.2.3. Consider the group G = Γ10,20. One can verify (by conjugating<br />
the corresponding permutations) that we can take A = Sk with k = 3, and<br />
α : z ↦→ −z + 3 is a reflection in the line x = 3<br />
2 . G has three cusps and we can<br />
choose representatives p1 = ∞, p2 = 1 and p3 = 3<br />
2 . Now we see that α(∞) = ∞,<br />
α(1) = 2 and α <br />
3 3<br />
2 = 2 . Hence, since α2 = Id also α(p2) = p2. And thus α<br />
preserves all cusp classes.<br />
For any α-odd newform f on G, the Fourier coefficient c(−1) = e πi<br />
4 (6±4) = i.<br />
Experimentally we found only odd newforms on this group! Cf. Remark 3.2.9<br />
and Table 3.6.<br />
Example 3.2.4. Consider the group G = Γ10,14. One can verify that here we<br />
can take A = S k with k = 6, and α : z ↦→ −z + 6 is a reflection in the line<br />
x = 3. G has three cusps and we can choose representatives p1 = ∞, p2 = 1<br />
and p3 = 3. Now we see that α(∞) = ∞, α(1) = 5 and α (3) = 3. Hence, since<br />
α 2 = Id also α(p2) ∼ p2. And thus α preserves all cusp classes.<br />
For any α-odd newform f on G, the Fourier coefficient c(−1) = e πi<br />
7 (12±7) =<br />
e 5πi<br />
7 . Experimentally we found only odd newforms on this group! Cf. Remark<br />
3.2.9 and Table 3.6.<br />
Example 3.2.5. Consider the group G = Γ10,8;7. One can verify that here we<br />
can take A = S k with k = 7. We get α : z ↦→ −z + 7. G has three cusps and<br />
we can choose representatives p1 ∈ {∞,0}, p2 = 2 and p3 = 5. We see that<br />
115
α(p1) = p1 and α (p2) = p3. Hence α permutes the cusps p2 and p3. And<br />
thus α does not preserve all cusp classes. In this case, experimentally, we<br />
found no <strong>Maass</strong> <strong>waveforms</strong> at all except for the oldforms from PSL(2,Z).<br />
Example 3.2.6. Consider the group G = Γ10,30. One can verify that here we<br />
can take A = S k with k = 4, and α : z ↦→ −z + 4 is a reflection in the line<br />
x = 2. G has three cusps and we can choose representatives p1 = ∞, p2 = 1<br />
and p3 = 2. We see that α(p1) = p1 and α(p3) = p3 and hence α (p2) = p2.<br />
Thus α preserves all cusp classes.<br />
For any α-odd newform f on G, the Fourier coefficient c(−1) = e πi<br />
5 (8±5) =<br />
e 3πi<br />
5 . Experimentally we found only odd newforms on this group! Cf. Remark<br />
3.2.9 and Table 3.6.<br />
Example 3.2.7. Consider the cycloidal group G = Γ10,10,1. One can verify that<br />
here we can take A = Sk with k = 9, and α : z ↦→ −z + 9 is a reflection in the<br />
line x = 9<br />
2 . G has only one cusp, ∞, and it is clearly preserved by α. Any<br />
α-odd function f on G will have Fourier coefficient c(−1) = e πi<br />
10 (18±10) = e 4πi<br />
5 ,<br />
and any α-even function will have c(−1) = e πi<br />
10 (18) = e 9πi<br />
5 . Experimentally we<br />
found both odd and even newforms on this group! Cf. Remark 3.2.9 and Table<br />
3.5.<br />
To ascertain that we actually have newforms we have to find a way to check<br />
for supergroups in PSL(2,Z); fortunately there is a well-known combinatorial<br />
method to find all these. We now turn to describe this method.<br />
Definition 3.2.3. A block system for a subgroup H ⊆ Sµ is an equivalence<br />
relation ≡ on the set {1,2,..., µ} such that<br />
∀h ∈ H, ∀x,y ∈ {1,2,..., µ} : x ≡ y ⇔ h(x) ≡ h(y).<br />
An equivalence class <strong>of</strong> ≡ is called a block.<br />
Note that for any H ⊆ Sµ there exist two trivial block systems: The block<br />
system with µ blocks, i.e. x ≡ y for all x = y ∈,{1,2,..., µ}; and the block<br />
system with 1 block, i.e. x ≡ y for all x,y ∈ {1,2,..., µ}.<br />
It is easy to see that if the group H is transitive, then all blocks <strong>of</strong> H must<br />
have the same number <strong>of</strong> elements. One can show the following proposition.<br />
Proposition 3.2.2. Let the legitimate pair (σE,σR) correspond to the group<br />
G ⊂ PSL(2,Z). Then there exists a supergroup G ′ , G ⊂ G ′ ⊂ PSL(2,Z) if and<br />
only if the group 〈σE,σR〉 = h(PSL(2,Z)) ⊆ Sµ supports a non-trivial block<br />
system.<br />
Outline <strong>of</strong> pro<strong>of</strong>. Suppose that G ′ is a supergroup <strong>of</strong> G in PSL(2,Z) and set<br />
B = {h(γ)(1)|γ ∈ G ′ } ⊆ {1,2,..., µ}. Observe that |B| ≥ 2 if G ′ = G, and<br />
116
|B| < µ if G ′ = PSL(2,Z). It is easy to verify that the equivalence relation<br />
defined by<br />
x ≡ y ⇐⇒ ∃γ ∈ PSL(2,Z) : [h(γ)(x) ∈ B and h(γ)(y) ∈ B]<br />
gives a block system, and that [1] = B.<br />
On the other hand, if ≡ is a non-trivial block system for h(PSL(2,Z)), then<br />
it is easy to verify that the group<br />
G ′ = {γ ∈ PSL(2,Z)|h(γ)(1) ≡ 1}<br />
is a supergroup <strong>of</strong> G, G G ′ PSL(2,Z).<br />
Remark 3.2.7. Note that an equivalence relation ≡ is a block system for the<br />
group h(PSL(2,Z)) = 〈σE,σR〉 if and only if<br />
∀x,y ∈ {1,..., µ} : x ≡ y ⇐⇒ σE(x) ≡ σE(y) ⇐⇒ σR(x) ≡ σR(y).<br />
Remark 3.2.8. Suppose that (abc) is a 3-cycle <strong>of</strong> σR. Then if a ≡ b, we must<br />
have σR(a) = b ≡ σR(b) = c, and similarly if a ≡ c or b ≡ c. Hence either<br />
a,b,c are in the same block or they are all in different blocks.<br />
We will now give an explicit example <strong>of</strong> how one checks for block systems.<br />
Example 3.2.8. Consider the group Γ10,20 (see Table 3.1). There are two possibilities<br />
for block systems. The block sizes are either 5+5 or 2+2+2+2+2.<br />
We have σE = (12)(34)(56)(78)(910) and σR = (1)(235)(467)(8910). By<br />
Remark 3.2.8 it is clear that we can not have a 5 + 5 block system. How about<br />
2 + 2 + 2 + 2 + 2? Suppose that 1 ≡ x, then 1 = σR(1) ≡ σR(x), hence the<br />
block containing 1 must contain x and σR(x). Since the block size is 2 we must<br />
have σR(x) = x or σR(x) = 1, but the only fixed element <strong>of</strong> σR is 1, hence it is<br />
impossible to have a 2 + 2 + 2 + 2 + 2 block system also.<br />
We conclude that there is no supergroup between Γ10,20 and PSL(2,Z). And<br />
in view <strong>of</strong> Proposition 3.2.1, Example 3.2.3 and Remark 3.2.5 we have shown<br />
that there exist newforms on Γ10,20.<br />
Remark 3.2.9. The groups we are primarily interested in are those which are<br />
not congruence subgroups and that satisfy Prop. 3.2.1. Up to index 11 (which<br />
is as far we have checked) this includes all groups G which satisfy (G ∗ ) = (G)<br />
except for Γ10,8,3 (on which the symmetry α permutes the cusps). All these<br />
groups have been investigated with respect to possible supergroups (note that<br />
there can be no supergroup <strong>of</strong> groups with prime index).<br />
Of the groups under consideration we found no supergroups for: all groups<br />
<strong>of</strong> index 10, the groups Γ9,9;1, Γ9,20, Γ9,15 and Γ9,15 <strong>of</strong> index 9, Γ8,8;1 and Γ8,8;3<br />
<strong>of</strong> index 8. On all these groups we claim that there exist newforms.<br />
117
3.2.2 Congruence subgroups<br />
Let G ⊆ PSL(2,Z) be a subgroup <strong>of</strong> index µ and generalized level N. It is<br />
known that if G is a congruence subgroup then G has level N (cf. [104]).<br />
We also remark that any PSL(2,Z)-conjugate <strong>of</strong> a congruence group is also a<br />
congruence subgroup since Γ(N) is normal in PSL(2,Z).<br />
Remark 3.2.10. Observe that if G has index µ and is a congruence subgroup<br />
<strong>of</strong> level N, then µ must divide the index <strong>of</strong> Γ(N) in Γ(1) = PSL(2,Z):<br />
[Γ(N) : Γ(1)] = 1<br />
2 N3 −2<br />
∏ 1 − p<br />
p|N<br />
, (3.3)<br />
where the product is taken over all prime divisors <strong>of</strong> N (valid for N ≥ 3, for<br />
N = 2 drop the factor 1<br />
2 ). Hence if this is not the case, then G can not be a<br />
congruence subgroup. The definitions <strong>of</strong> the groups that appear in the next two<br />
examples are given in Table 3.1.<br />
Example 3.2.9. Consider the groups Γ7,6, Γ7,10and Γ7,12 <strong>of</strong> type (7; 0,2,1,1)<br />
and generalized levels 6, 10 and 12 respectively. From (3.3) we see that the<br />
index <strong>of</strong> Γ(6) in PSL(2,Z) is 72, and the index <strong>of</strong> Γ(10) in PSL(2,Z) is 360.<br />
Hence since 7 ∤ 72 and 7 ∤ 360, all the above groups are noncongruence subgroups.<br />
Example 3.2.10. Consider the group Γ9,8 <strong>of</strong> type (9; 0,2,3,0) and generalized<br />
level 8. The index <strong>of</strong> Γ(8) in Γ(1) is 192, and since 9 ∤ 192 the group Γ9,8 is a<br />
noncongruence subgroup.<br />
Clearly this fact can not tell us that a given group is a congruence subgroup,<br />
but it is even the case that in general it can not even help us to determine<br />
that a given group is not a congruence subgroup. E.g. the group Γ9,6;1 <strong>of</strong><br />
type (9; 0,2,3,0) and generalized level 6 is not a congruence subgroup even<br />
though 9|72. But actually the group Γ9,6;2 with the same type is a congruence<br />
subgroup. So the type and generalized level are not enough to decide if a<br />
group is a congruence group or not.<br />
Fortunately there is a stronger theorem that give us necessary and sufficient<br />
conditions on the legitimate pair (σE,σR) in order for the corresponding subgroup<br />
to be a congruence subgroup. The following theorem is reformulated<br />
using our notation (and remember that we use an anti-homomorphism).<br />
Theorem 3.4. (Hsu [47, thm. 3.1])<br />
Suppose that (σE,σR) is a legitimate pair with corresponding group Γ and<br />
that σS = σRσE has order N = 2 k m, where m is odd and k ≥ 0. Let a and b<br />
be inverses <strong>of</strong> 2 and 5 mod N respectively (i.e. 2a ≡ 5b ≡ 1 mod N). We now<br />
have three cases:<br />
118
(a) N is odd, i.e. k = 0. Then Γ is a congruence subgroup if and only<br />
if<br />
1 = σRσSσRσ 1−a3<br />
S .<br />
(b) N is a power <strong>of</strong> 2, i.e. m = 1 : Let σS ˜ = σ 20<br />
S (σRσS) b σ −5<br />
S<br />
σ −1<br />
R .<br />
Then Γ is a congruence subgroup if and only if the following three<br />
relations hold:<br />
σ −1<br />
E ˜σSσE = ˜σ −1<br />
S , (b:1)<br />
˜σ −1<br />
S (σRσS) ˜σS = (σRσS) 25 , (b:2)<br />
<br />
˜σS (σRσS) 5 3 σE<br />
= 1. (b:3)<br />
(c) N has both an even and an odd part, i.e. if m ≥ 3 and k ≥ 1.<br />
Let c be the unique integer mod N such that c ≡ 0 mod 2 k and<br />
c ≡ 1 mod m, and let d be the unique integer mod N such that<br />
d ≡ 0 mod m and d ≡ 1 mod 2 k . Let α = σ c S , β = (σRσS) c , γ = σ d,<br />
S ,<br />
ρ = (σRσS) d, , π = γ 20 ρ b γ −4 ρ −1 , ζ = αβ −1 α and ξ = γρ −1 γ.<br />
Then Γ is a congruence subgroup if and only if the following 7<br />
relations hold:<br />
3.3 Numerical implementation<br />
αρ = ρα, (c:1)<br />
ζ 4 = 1, (c:2)<br />
ζ 2 = β −1 α 3 , (c:3)<br />
ζ 2 = β 2 α −a 3 , (c:4)<br />
ξ 2 = πρ 5 ξ 3 , (c:5)<br />
ξ −1 πξ = π −1 , (c:6)<br />
π −1 ρπ = ρ 25, . (c:7)<br />
Our goal is to investigate <strong>Maass</strong> <strong>waveforms</strong> on non-congruence subgroups,<br />
and thus we must find examples <strong>of</strong> such groups.<br />
Let N be a positive integer. By Theorem 3.2 we see that to find all subgroups<br />
(up to conjugation) <strong>of</strong> index N in PSL(2,Z) we first need to find all equivalence<br />
classes <strong>of</strong> legitimate pairs (σE,σR) in SN. To generate all elements <strong>of</strong><br />
SN is numerically speedy, and there exist a number <strong>of</strong> fast algorithms (cf.,<br />
e.g. [49]).<br />
The computationally hard part here is to identify the conjugates <strong>of</strong> legiti-<br />
119
mate pairs, i.e. given a list <strong>of</strong> legitimate pairs, find out the ones which are conjugates<br />
<strong>of</strong> each other. We know that conjugation preserves the cycle-structure,<br />
i.e. if σ1 = σ −1 σ2σ then σ1 and σ2 have the same set <strong>of</strong> cycles. If σ conjugates<br />
two pairs ( mod 1) we know first <strong>of</strong> all that σ(1) = 1, hence there are<br />
only (N − 1)! choices, and we can narrow the number <strong>of</strong> possibilities down<br />
further by studying the cycle structures <strong>of</strong> σE and σR. Unfortunately it seems<br />
that without calculating the details by hand for a specific value <strong>of</strong> N the problem<br />
is still hard even with as much automated simplifications as possible.<br />
Once we have a list <strong>of</strong> non-conjugated legitimate pairs we use Theorem<br />
3.4 to tell which pairs correspond to congruence subgroups. Then in order<br />
to apply the usual <strong>Maass</strong> waveform algorithms (cf. Section 1.3) for the corresponding<br />
subgroup <strong>of</strong> PSL(2,Z) we use Remark 3.2.1 to compute a set <strong>of</strong><br />
coset representatives.<br />
Example 3.3.1. We will see how to explicitly compute representatives for the<br />
PSL(2,Z)-conjugacy classes <strong>of</strong> the subgroups <strong>of</strong> type (7;0;1,1). First we observe<br />
that σE consists <strong>of</strong> one fixed element and 3 2-cycles. The letter 1 is<br />
special due to our convention in Theorem 3.2, but since we are only interested<br />
in representatives we are free to conjugate the fixed element <strong>of</strong> σE to 1 (cf. Remark<br />
3.2.2), hence, without loss <strong>of</strong> generality, we can assume that<br />
σE = (1)(23)(45)(67).<br />
Remember that the equivalence we consider (∼1) amounts to finding a permutation<br />
π which preserves 1 and now that we have fixed σE, such π must<br />
also preserve σE. Any choices we now make for σR are made modulo such a<br />
permutation.<br />
Now, we know that σR has one fixed element and 2 3-cycles. Since the<br />
numbers 2,3,...,7 are now on equal footing we can assume that σR(2) = 2<br />
and we can write<br />
σR = (2)(1bc)(de f ),<br />
and we have to choose the 3-cycles in turn. The elements 4,5,6,7 are equivalent,<br />
while 3 is essentially different. There are thus 2 cases for b. Either b = 3<br />
or b = 4. If b = 3, then we can assume c = 4 (and without loss <strong>of</strong> generality<br />
d = 5) and we have<br />
= (2)(134)(5e f ).<br />
σR1<br />
In case b = 4, then 6,7 are equivalent, and we observe that since (σE,σR) must<br />
be transitive we can not have c = 5. Hence either c = 3, or c = 6 (and, wlog<br />
d = 5 in both cases). We have<br />
120<br />
σR2<br />
σR3<br />
= (2)(143)(5e f ), and<br />
= (2)(146)(3e f ).
We now have to choose the last 3-cycle. For the last cycle <strong>of</strong> σR1 and σR2 ,<br />
clearly 6 and 7 are equivalent, and wlog e = 6 and f = 7 and we get<br />
σR1<br />
σR2<br />
= (2)(134)(567), and<br />
= (2)(143)(567).<br />
For σR3 = (2)(146)(5e f ), on the other hand, there are two possible (inequivalent)<br />
choices e = 5, f = 7 or e = 7, f = 5, corresponding to<br />
σR3<br />
σR4<br />
= (2)(146)(357), and<br />
= (2)(146)(375).<br />
We thus have 4 inequivalent legitimate pairs: σE,σR j<br />
subgroups G j, j = 1,2,3,4. The corresponding σS j = σR j σE are<br />
σS1<br />
σS2<br />
σS3<br />
σS4<br />
= (132465)(7),<br />
= (146532)(7),<br />
= (147)(2563),<br />
= (14327)(56).<br />
, corresponding to 4<br />
And we see that the generalized levels are 6, 6, 12 and 10. Note that σ ∗ R1 =<br />
σEσ 2 R1 σE = π −1 σR2 π ∼1 σR2 where π = (32)(45). Hence G∗ 1 = G2. The corresponding<br />
groups in Table 3.1 are Γ7,6, Γ ∗ 7,6 , Γ7,12 and Γ7,10. Fundamental<br />
domains <strong>of</strong> these groups, with the combinatorial structure indicated, can be<br />
seen in Figure 3.1.<br />
3.4 Numerical Results<br />
3.4.1 Subgroups<br />
In this section we will give examples <strong>of</strong> results obtained. Table 3.1 contains<br />
lists <strong>of</strong> specifications <strong>of</strong> conjugacy classes <strong>of</strong> subgroups <strong>of</strong> PSL(2,Z) <strong>of</strong> index<br />
less than or equal to 12. For each conjugacy class we have chosen a representative<br />
group, Γµ,l;i, for which we have also given the corresponding permutations.<br />
Here µ is the index, l is the generalized level and i is an arbitrary (but<br />
fixed by the program) enumeration <strong>of</strong> the conjugacy classes.<br />
To show which groups have a reflectional symmetry (cf. Prop. 3.2.1) we<br />
also list the equivalence class <strong>of</strong> G ∗ = JGJ. In this column we use the notation<br />
(G ∗ ) to say that (G ∗ ) = (G), and (G) to say that (G ∗ ) = (G) for the given<br />
group G.<br />
121
Figure 3.1: Fundamental domains for groups <strong>of</strong> type (7;0,1,1)<br />
122<br />
1 3 2 4 6 5<br />
(a) Γ7,6<br />
1 4 6 5 3 2<br />
1 4 7<br />
6<br />
3<br />
5<br />
2<br />
(c) Γ7,12<br />
7<br />
(b) Γ ∗ 7,6<br />
1 4 3 2 6<br />
7<br />
5<br />
(d) Γ7,10<br />
7
3.4.2 Newforms<br />
We have checked for <strong>Maass</strong> <strong>waveforms</strong> (newforms) on all the listed groups<br />
with index ≤ 11. As expected we found newforms on all congruence subgroups<br />
and all cycloidal subgroups. 1<br />
We also found newforms on all noncongruence, noncycloidal subgroups<br />
which satisfy Proposition 3.2.1. In this case, the number <strong>of</strong> newforms that we<br />
found is approximately one half <strong>of</strong> what is indicated by Weyl’s law for the<br />
surface G\H, as is to be expected for the α-odd space L 2 − (G\H). (In this<br />
vein, cf. [88, pp. 448 (footnote 1), 670 (middle)].) Since our investigation has<br />
been directed at investigating as many groups as possible, we have generally<br />
not taken R beyond 10 or so for each group. (That the Weyl ratios are only<br />
approximately 50% is thus not very disturbing; taking R larger undoubtedly<br />
produces values much closer to 50%.)<br />
In the case <strong>of</strong> noncongruence, noncycloidal groups which do not satisfy<br />
Proposition 3.2.1, we found no newforms whatsoever. An example <strong>of</strong> a group<br />
satisfying (G ∗ ) = (G), but that violates the cusp class preserving condition<br />
is Γ10,8;3. This indicates that the Phillips-Sarnak conjecture is true even for<br />
subgroups <strong>of</strong> the modular group.<br />
When testing for existence/nonexistence <strong>of</strong> newforms we ran the program<br />
up to height R = 10 for indexes ≤ 10 and up to R = 5 for index 11.<br />
In all cases <strong>of</strong> non-congruence, non-cycloidal groups that we have checked,<br />
all newforms found have been <strong>of</strong> α−odd type. For cycloidal groups, we found<br />
both α-even and α-odd newforms, exactly as one would expect from the trace<br />
formula. Cf. footnote 1.<br />
Tables 3.2-3.6 contain examples <strong>of</strong> eigenvalues for various noncongruence<br />
subgroups.<br />
Further data than that which is presented in this section is available from<br />
the author upon request.<br />
3.4.3 Fourier coefficients<br />
We have also investigated the distribution <strong>of</strong> Fourier coefficients in a few examples.<br />
Figure 3.3 (b) gives a histogram <strong>of</strong> 12422 Fourier coefficients (they<br />
are real and we normalized them to have mean 0 and standard deviation 1) <strong>of</strong> a<br />
newform with eigenvalue R = 3.34168098977 on Γ7,12. In the same figure we<br />
also plotted the Gaussian curve with the same mean and standard deviation.<br />
We have also studied the Fourier coefficients <strong>of</strong> a newform on Γ10,8;1 with<br />
eigenvalue R = 2.40931877484576. Here one should notice that the symmetry<br />
J acts as a shifted reflection on Γ10,8;1 (i.e. Γ ∗ 10,8;1 ∼ S−5 Γ10,8;1S 5 ) and hence<br />
the Fourier coefficients will not be real in this case, but have arguments shifted<br />
1 The Eisenstein series and scattering determinant for cycloidal groups are readily seen to be<br />
essentially the same as for PSL(2,Z). Cf. [105] and see also [100].<br />
123
Figure 3.2: Plot <strong>of</strong> Fourier coefficients in the complex plane.<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
-0.5<br />
-1<br />
-1.5<br />
”14412 Coefficients for R = 2.0493 . . . on Γ10,8;1”<br />
-2<br />
-3 -2 -1 0 1 2 3 4<br />
by multiples π<br />
8 . The surprising thing here is that it seems that the different<br />
residue classes modulo 8 also have different standard deviation, as can be<br />
seen in figure 3.2, which shows a plot in the complex plane <strong>of</strong> the first 14412<br />
Fourier coefficients. The coefficients were shifted back to the real line and<br />
then normalized with appropriate standard deviation (according to the residue<br />
class n mod 8). Figure 3.3(a) contains a histogram and a Gaussian fit to the<br />
resulting sequence.<br />
In both <strong>of</strong> these cases the fit to the Gaussian looks good, but more data<br />
has to be analyzed before one can draw any conclusions. This is certainly<br />
something that needs further investigation.<br />
124
Figure 3.3: Distribution <strong>of</strong> Fourier Coefficients<br />
0.4<br />
0.35<br />
0.3<br />
0.25<br />
0.2<br />
0.15<br />
0.1<br />
0.05<br />
14412 Coefficients<br />
Γ 10,8;1<br />
R=2.0493<br />
0<br />
−4 −3 −2 −1 0 1 2 3 4 5<br />
0.4<br />
0.35<br />
0.3<br />
0.25<br />
0.2<br />
0.15<br />
0.1<br />
0.05<br />
(a) At the group Γ10,8;1<br />
12422 Coefficients<br />
Γ 7,12<br />
R=3.341...<br />
0<br />
−4 −3 −2 −1 0 1 2 3 4 5<br />
(b) At the group Γ7,12<br />
125
126<br />
Table 3.1: Conjugacy classes <strong>of</strong> subgroups <strong>of</strong> PSL(2,Z) with index ≤ 12<br />
Γµ,l,i h e2 e3 g G ∗ C a σE σR σS<br />
Index=1 (1 equivalence class)<br />
(Γ2,2) 1 0 2 0 (G) T (1 2) ( 1)( 2) ( 1 2)<br />
Index=3 (2 equivalence classes)<br />
(Γ3,3) 1 3 0 0 (G) T (1)(2)(3) (1 2 3) (1 2 3)<br />
(Γ3,2) 2 1 0 0 (G) T (1)(2 3) (1 2 3) (1 2)(3)<br />
Index=4 (2 equivalence classes)<br />
(Γ4,4) 1 2 1 0 (G) T (1)(2)(3 4) (1 2 4)(3) (1 2 4 3)<br />
(Γ4,3) 2 0 1 0 (G) T (1 2)(3 4) (1)(2 3 4) (1 3 2)(4)<br />
Index=5 (1 equivalence class)<br />
(Γ5,5) 1 1 2 0 (G) T (1)(2 3)(4 5) (1 3 5)(2)(4) (1 3 2 5 4)<br />
Index=6 (10 equivalence classes)<br />
(Γ6,6;1) 1 0 0 1 (G) T (1 2)(3 4)(5 6) (1 3 5)(2 4 6) (1 4 5 2 3 6)<br />
(Γ6,6;2) 1 0 3 0 (G) T (1 2)(3 4)(5 6) (1)(2 4 6)(3)(5) (1 4 3 6 5 2)<br />
(Γ6,6;3) 1 4 0 0 (G) T (1)(2)(3)(4)(5 6) (1 2 5)(3 4 6) (1 2 5 3 4 6)<br />
(Γ6,5) 2 2 0 0 (G) T (1)(2)(3 4)(5 6) (1 2 3)(4 5 6) (1 2 3 5 4)(6)<br />
(Γ6,3) 2 2 0 0 (G) T (1)(2)(3 4)(5 6) (1 3 5)(2 4 6) (1 3 6)(2 4 5)<br />
a This column shows if the listed group is a congruence subgroup (T) or not (F).
127<br />
Γµ,l,i h e2 e3 g G ∗ C a σE σR σS<br />
(Γ6,4;1) 2 2 0 0 (G) T (1)(2)(3 4)(5 6) (1 3 6)(2 5 4) (1 3 2 5)(4 6)<br />
(Γ6,4;2) 3 0 0 0 (G) T (1 2)(3 4)(5 6) (1 2 3)(4 5 6) (1 3 5 4)(2)(6)<br />
(Γ6,4;3) 3 0 0 0 (G) T (1 2)(3 4)(5 6) (1 3 2)(4 6 5) (1)( 2 3 6 4)(5)<br />
(Γ6,4;4) 3 0 0 0 (G) T (1 2)(3 4)(5 6) (1 4 3)(2 6 5) (1 6 2 4)(3)(5)<br />
(Γ6,2) 3 0 0 0 (G) T (1 2)(3 4)(5 6) (1 3 6)(2 5 4) (1 5)(2 3)(4 6)<br />
Index=7 (6 equivalence classes)<br />
(Γ7,7) 1 3 1 0 (G ∗ ) T (1)(2)(3)(4 5)(6 7) (1 2 6)(3 5 7)(4) (1 2 6 3 5 4 7)<br />
(Γ7,6) 2 1 1 0 (G ∗ ) F (1)(2 3)(4 5)(6 7) (1 3 4)(2)(5 6 7) (1 3 2 4 6 5)(7)<br />
(Γ7,12) 2 1 1 0 (G) F (1)(2 3)(4 5)(6 7) (1 4 6)(2)(3 5 7) (1 4 7)(2 5 6 3)<br />
(Γ7,10) 2 1 1 0 (G) F (1)(2 3)(4 5)(6 7) (1 4 7)(2)(3 6 5) (1 4 3 2 6)(5 7)<br />
Index=8 (6 equivalence classes)<br />
(Γ8,8;1) 1 2 2 0 (G) F (1)(2)(3 4)(5 6)(7 8) (1 2 7)(3)(4 6 8)(5) (1 2 7 4 3 6 5 8)<br />
(Γ8,8;2) 1 2 2 0 (G ∗ ) T (1)(2)(3 4)(5 6)(7 8) (1 4 7)(2 6 8)(3)(5) (1 4 3 7 2 6 5 8)<br />
(Γ8,8;3) 1 2 2 0 (G) F (1)(2)(3 4)(5 6)(7 8) (1 4 8)(2 7 6)(3)(5) (1 4 3 8 6 5 2 7)<br />
(Γ8,7) 2 0 2 0 (G) T (1 2)(3 4)(5 6)(7 8) (1)(2 4 5)(3)(6 7 8) (1 4 3 5 7 6 2)(8)<br />
(Γ8,4) 2 0 2 0 (G) T (1 2)(3 4)(5 6)(7 8) (1)(2 5 7)(3)(4 6 8) (1 5 8 2)(3 6 7 4)<br />
(Γ8,6) 2 0 2 0 (G) T (1 2)(3 4)(5 6)(7 8) (1)(2 5 8)(3)(4 7 6) (1 5 4 3 7 2)(6 8)<br />
a This column shows if the listed group is a congruence subgroup (T) or not (F).
128<br />
Γµ,l,i h e2 e3 g G ∗ C a σE σR σS<br />
Index=9 (14 equivalence classes)<br />
(Γ9,9;1) 1 1 0 1 (G) F (1)(2 3)(4 5)(6 7)(8 9) (1 2 4)(3 6 8)(5 7 9) (1 2 6 9 3 4 7 8 5)<br />
(Γ9,9;2) 1 1 3 0 (G ∗ ) F (1)(2 3)(4 5)(6 7)(8 9) (1 3 8)(2)(4)(5 7 9)(6) (1 3 2 8 5 4 76 9)<br />
(Γ9,9;3) 1 5 0 0 (G) T (1)(2)(3)(4)(5)(6 7)(8 9) (1 2 6)(3 4 8)(5 7 9) (1 2 6 9 3 4 8 5 7)<br />
(Γ9,8) 2 3 0 0 (G ∗ ) F (1)(2)(3)(4 5)(6 7)(8 9) (1 2 4)(3 5 6)(7 8 9) (1 2 4 6 8 7 3 5)(9)<br />
(Γ9,6;1) 2 3 0 0 (G) F (1)(2)(3)(4 5)(6 7)(8 9) (1 2 4)(3 6 8)(5 7 9) (1 2 4 7 8 5)(36 9)<br />
(Γ9,14) 2 3 0 0 (G) F (1)(2)(3)(4 5)(6 7)(8 9) (1 2 4)(3 6 8)(5 9 7) (1 2 4 9 3 6 5)(7 8)<br />
(Γ9,20) 2 3 0 0 (G) F (1)(2)(3)(4 5)(6 7)(8 9) (1 4 6)(2 5 8)(3 7 9) (1 4 8 3 7)(2 56 9)<br />
(Γ9,6;2) 2 3 0 0 (G) T (1)(2)(3)(4 5)(6 7)(8 9) (1 4 6)(2 7 9)(3 8 5) (1 4 3 8 2 7)(5 6 9)<br />
(Γ9,15) 3 1 0 0 (G) F (1)(2 3)(4 5)(6 7)(8 9) (1 2 4)(3 5 6)(7 8 9) (1 2 5)(3 4 6 8 7)(9)<br />
(Γ9,6;3) 3 1 0 0 (G) F (1)(2 3)(4 5)(6 7)(8 9) (1 2 4)(3 6 5)(7 8 9) (1 2 6 8 7 5)(3 4)(9)<br />
(Γ9,7) 3 1 0 0 (G) F (1)(2 3)(4 5)(6 7)(8 9) (1 2 4)(3 6 7)(5 8 9) (1 2 6 3 4 8 5)(7)(9)<br />
(Γ9,12) 3 1 0 0 (G) F (1)(2 3)(4 5)(6 7)(8 9) (1 2 4)(3 6 8)(5 9 7) (1 2 6 5)(3 4 9)(7 8)<br />
Index=10 (26 equivalence classes)<br />
(Γ10,10;1) 1 0 1 1 (G) F (1 2)(3 4)(5 6)(7 8)(9 10) (1)(2 3 5)(4 7 9)(6 8 10) (1 3 7 10 4 5 8 9 6 2)<br />
(Γ10,10;2) 1 0 4 0 (G) T (1 2)(3 4)(5 6)(7 8)(9 10) (1)(2 4 9)(3)(5)(6 8 10)(7) (1 4 3 9 6 5 8 7 10 2)<br />
(Γ10,10;3) 1 4 1 0 (G) F (1)(2)(3)(4)(5 6)(7 8)(9 10) (1 2 7)(3 4 9)(5)(6 8 10) (1 2 7 10 3 4 9 6 5 8)<br />
a This column shows if the listed group is a congruence subgroup (T) or not (F).
129<br />
Γµ,l,i h e2 e3 g G ∗ C a σE σR σS<br />
(Γ10,10;4) 1 4 1 0 (G ∗ ) F (1)(2)(3)(4)(5 6)(7 8)(9 10) (1 2 7)(3 6 9)(4 8 10)(5) (1 2 7 10 3 6 5 9 4 8)<br />
(Γ10,10;5) 1 4 1 0 (G ∗ ) F (1)(2)(3)(4)(5 6)(7 8)(9 10) (1 2 7)(3 6 10)(4 9 8)(5) (1 2 7 4 9 3 6 5 10 8)<br />
(Γ10,9;1) 2 2 1 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10) (1 2 5)(3)(4 6 7)(8 9 10) (1 2 5 7 9 8 4 3 6)(10)<br />
(Γ10,9;2) 2 2 1 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10) (1 4 7)(2 5 8)(3)(6 9 10) (1 4 3 7 2 5 9 6 8)(10)<br />
(Γ10,9;3) 2 2 1 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10) (1 4 5)(2 6 7)(3)(8 9 10) (1 4 3 5 7 9 8 2 6)(10)<br />
(Γ10,12;1) 2 2 1 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10) (1 2 5)(3)(4 7 9)(6 8 10) (1 2 5 8 9 6)(3 7 10 4)<br />
(Γ10,12;2) 2 2 1 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10) (1 5 7)(2 6 9)(3)(48 10) (1 5 9 4 3 8)(2 6 7 10)<br />
(Γ10,8;1) 2 2 1 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10) (1 2 5)(3)(4 7 10)(6 9 8) (1 2 5 9 4 3 7 6)(8 10)<br />
(Γ10,8;2) 2 2 1 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10) (1 4 7)(2 5 9)(3)(6 8 10) (1 4 3 7 10 2 5 8)(6 9)<br />
(Γ10,21;1) 2 2 1 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10) (1 4 7)(2 5 9)(3)(6 10 8) (1 4 3 7 6 9 8)(2 5 10)<br />
(Γ10,21;2) 2 2 1 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10) (1 5 7)(2 8 10)(3)(49 6) (1 5 4 3 9 2 8)(6 7 10)<br />
(Γ10,5) 2 2 1 0 (G) T (1)(2)(3 4)(5 6)(7 8)(9 10) (1 5 7)(2 8 10)(3)(4 6 9) (1 5 9 2 8)(3 6 7 10 4)<br />
(Γ10,20) 3 0 1 0 (G) F (1 2)(3 4)(5 6)(7 8)(9 10) (1)(2 3 5)(4 6 7)(8 9 10) (1 3 6 2)(4 5 7 9 8)(10)<br />
(Γ10,14) 3 0 1 0 (G) F (1 2)(3 4)(5 6)(7 8)(9 10) (1)(2 3 5)(4 7 6)(8 9 10) (1 3 7 9 8 6 2)(4 5)(10)<br />
(Γ10,8;3) 3 0 1 0 (G) a F (1 2)(3 4)(5 6)(7 8)(9 10) (1)(2 3 5)(4 7 8)(6 9 10) (1 3 7 4 5 9 6 2)(8)(10)<br />
(Γ10,30) 3 0 1 0 (G) F (1 2)(3 4)(5 6)(7 8)(9 10) (1)(2 3 5)(4 7 10)(6 9 8) (1 3 7 6 2)(4 5 9)(8 10)<br />
Index=11 (26 equivalence classes)<br />
a This column shows if the listed group is a congruence subgroup (T) or not (F).
130<br />
Γµ,l,i h e2 e3 g G ∗ C a σE σR σS<br />
(Γ11,11;1) 1 3 2 0 (G) F (1)(2)(3)(4 5)(6 7)(8 9)(10 11) (1 8 10)(2 9 7)(3 5 11)(4)(6) (1 8 7 6 2 9 10 3 5 4 11)<br />
(Γ11,11;2) 1 3 2 0 (G) F (1)(2)(3)(4 5)(6 7)(8 9)(10 11) (1 5 10)(2 11 8)(3 9 7)(4)(6) (1 5 4 10 8 7 6 3 9 2 11)<br />
(Γ11,11;3) 1 3 2 0 (G ∗ ) F (1)(2)(3)(4 5)(6 7)(8 9)(10 11) (1 5 10)(2 9 3)(4)(6)(7 11 8) (1 5 4 10 8 3 2 9 7 6 11)<br />
(Γ11,11;4) 1 3 2 0 (G ∗ ) T (1)(2)(3)(4 5)(6 7)(8 9)(10 11) (1 2 10)(3 5 9)(4)(6)(7 11 8) (1 2 10 8 3 5 4 9 7 6 11)<br />
(Γ11,11;5) 1 3 2 0 (G ∗ ) F (1)(2)(3)(4 5)(6 7)(8 9)(10 11) (1 2 8)(3 9 11)(4)(5 10 7)(6) (1 2 8 11 7 6 5 4 10 3 9)<br />
(Γ11,11;6) 1 3 2 0 (G ∗ ) F (1)(2)(3)(4 5)(6 7)(8 9)(10 11) (1 8 10)(2 11 7)(3 9 5)(4)(6) (1 8 5 4 3 9 10 7 6 2 11)<br />
(Γ11,28;1) 2 1 2 0 (G) F (1)(2 3)(4 5)(6 7)(8 9)(10 11) (1 8 6)(2)(3 9 11)(4)(5 10 7) (1 8 11 7)(2 9 6 5 4 10 3)<br />
(Γ11,28;2) 2 1 2 0 (G ∗ ) F (1)(2 3)(4 5)(6 7)(8 9)(10 11) (1 6 3)(2)(4)(5 10 8)(7 11 9) (1 6 11 8 7 3 2)(4 10 9 5)<br />
(Γ11,10;1) 2 1 2 0 (G ∗ ) F (1)(2 3)(4 5)(6 7)(8 9)(10 11) (1 3 6)(2)(4)(5 7 11)(8 10 9) (1 3 2 6 11 9 10 5 4 7)(8)<br />
(Γ11,10;2) 2 1 2 0 (G ∗ ) F (1)(2 3)(4 5)(6 7)(8 9)(10 11) (1 6 3)(2)(4)(5 7 11)(8 10 9) (1 6 11 9 10 5 4 7 3 2)(8)<br />
(Γ11,10;3) 2 1 2 0 (G ∗ ) F (1)(2 3)(4 5)(6 7)(8 9)(10 11) (1 6 8)(2)(3 7 5)(4)(9 11 10) (1 6 5 4 3 2 7 8 11 9)(10)<br />
(Γ11,18;1) 2 1 2 0 (G) F (1)(2 3)(4 5)(6 7)(8 9)(10 11) (1 8 6)(2)(3 5 11)(4)(7 9 10) (1 8 10 3 2 5 4 11 7)(6 9)<br />
(Γ11,18;2) 2 1 2 0 (G ∗ ) F (1)(2 3)(4 5)(6 7)(8 9)(10 11) (1 3 6)(2)(4)(5 9 11)(7 10 8) (1 3 2 6 10 5 4 9 7)(8 11)<br />
(Γ11,30) 2 1 2 0 (G ∗ ) F (1)(2 3)(4 5)(6 7)(8 9)(10 11) (1 6 8)(2)(3 9 10)(4)(5 7 11) (1 6 11 3 2 9)(4 7 8 10 5)<br />
(Γ11,24;1) 2 1 2 0 (G) F (1)(2 3)(4 5)(6 7)(8 9)(10 11) (1 8 6)(2)(3 5 10)(4)(7 11 9) (1 8 7)(2 5 4 10 9 6 11 3)<br />
(Γ11,24;2) 2 1 2 0 (G) F (1)(2 3)(4 5)(6 7)(8 9)(10 11) (1 6 8)(2)(3 9 11)(4)(5 10 7) (1 6 5 4 10 3 2 9)(7 8 11)<br />
Index=12 (81 equivalence classes)<br />
a This column shows if the listed group is a congruence subgroup (T) or not (F).
131<br />
Γµ,l,i h e2 e3 g G ∗ C a σE σR σS<br />
(Γ12,12;1) 1 2 0 1 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 2 3)(4 7 10)(5 8 11)(6 9 12) (1 2 3 7 11 6 8 10 12 5 9 4)<br />
(Γ12,12;2) 1 2 0 1 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 10 7)(4 11 8)(6 12 9) (1 3 11 9 7 4 5 12 8 2 10 6)<br />
(Γ12,12;3) 1 2 0 1 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 10 7)(4 12 9)(6 11 8) (1 3 12 8 2 10 4 5 11 9 7 6)<br />
(Γ12,12;4) 1 2 0 1 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 9 6)(4 12 8)(7 10 11) (1 3 12 7 4 5 2 9 11 8 10 6)<br />
(Γ12,12;6) 1 2 0 1 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 9 4)(6 12 8)(7 10 11) (1 3 2 9 11 8 10 4 5 12 7 6)<br />
(Γ12,12;7) 1 2 3 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 9 11)(2 10 8)(3)(4 6 12)(5)(7) (1 9 8 7 2 10 11 4 3 6 5 12)<br />
(Γ12,12;9) 1 2 3 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 9 11)(2 12 8)(3)(4 6 10)(5)(7) (1 9 4 3 6 5 10 11 8 7 2 12)<br />
(Γ12,12;11) 1 2 3 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 2 11)(3)(4 6 10)(5)(7)(8 12 9) (1 2 11 9 4 3 6 5 10 8 7 12)<br />
(Γ12,12;13) 1 2 3 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 4 11)(2 6 10)(3)(5)(7)(8 12 9) (1 4 3 11 9 2 6 5 10 8 7 12)<br />
(Γ12,12;15) 1 2 3 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 4 11)(2 10 6)(3)(5)(7)(8 12 9) (1 4 3 11 9 6 5 2 10 8 7 12)<br />
(Γ12,12;16) 1 2 3 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 4 11)(2 9 8)(3)(5)(6 10 12)(7) (1 4 3 11 6 5 10 8 7 2 9 12)<br />
(Γ12,12;17) 1 6 0 0 (G) F (1)(2)(3)(4)(5)(6)(7 8)(9 10)(11 12) (1 2 7)(3 12 6)(4 8 10)(5 9 11) (1 2 7 10 11 6 3 12 5 9 4 8)<br />
(Γ12,12;18) 1 6 0 0 (G ∗ ) F (1)(2)(3)(4)(5)(6)(7 8)(9 10)(11 12) (1 2 7)(3 811)(4 9 12)(5 10 6) (1 2 7 11 4 9 6 5 10 12 3 8)<br />
(Γ12,12;20) 1 6 0 0 (G) T (1)(2)(3)(4)(5)(6)(7 8)(9 10)(11 12) (1 2 7)(3 104)(5 12 6)(8 11 9) (1 2 7 11 6 5 12 9 4 3 10 8)<br />
(Γ12,8;1) 2 0 0 1 (G) T (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 10 7)(4 12 9)(6 11 8) (1 10 4 5 11 9 7 6)(2 3 12 8)<br />
(Γ12,6;1) 2 0 0 1 (G) T (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 11 9)(4 6 7)(8 12 10) (1 11 10 2 3 6)(4 5 7 12 9 8)<br />
(Γ12,10;1) 2 0 0 1 (G) T (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 10 12)(4 6 7)(8 11 9) (1 10 8 4 5 7 11 2 3 6)(9 12)<br />
a This column shows if the listed group is a congruence subgroup (T) or not (F).
132<br />
Γµ,l,i h e2 e3 g G ∗ C a σE σR σS<br />
(Γ12,11;1) 2 0 0 1 (G) T (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 9 6)(4 10 7)(8 11 12) (1 9 7 11 8 4 5 2 3 10 6)(12)<br />
(Γ12,9;1) 2 0 0 1 (G) T (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 10 8)(4 11 9)(6 7 12) (1 10 4 5 7 2 3 11 6)(8 12 9)<br />
(Γ12,35;1) 2 0 3 0 (G) F (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1)(2 10 7)(3)(4 11 8)(5)(6 12 9) (1 10 6 5 12 8 2)(3 11 9 7 4)<br />
(Γ12,11;2) 2 0 3 0 (G) F (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1)(2 9 6)(3)(4 10 7)(5)(8 11 12) (1 9 7 11 8 4 3 10 6 5 2)(12)<br />
(Γ12,11;3) 2 0 3 0 (G) F (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1)(2 6 9)(3)(4 7 10)(5)(8 12 11) (1 6 5 9 4 3 7 12 8 10 2)(11)<br />
(Γ12,10;2) 2 0 3 0 (G) F (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1)(2 10 4)(3)(5)(6 11 8)(7 12 9) (1 10 7 6 5 11 9 4 3 2)(8 12)<br />
(Γ12,8;2) 2 0 3 0 (G) F (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1)(2 9 6)(3)(4 12 8)(5)(7 10 11) (1 9 11 8 10 6 5 2)(3 12 7 4)<br />
(Γ12,9;2) 2 0 3 0 (G) T (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1)(2 8 10)(3)(4 9 11)(5)(6 12 7) (1 8 6 5 12 4 3 9 2)(7 10 11)<br />
(Γ12,11;4) 2 4 0 0 (G ∗ ) F (1)(2)(3)(4)(5 6)(7 8)(9 10)(11 12) (1 2 5)(3 6 8)(4 7 12)(9 11 10) (1 2 5 8 12 10 11 4 7 3 6)(9)<br />
(Γ12,9;3) 2 4 0 0 (G ∗ ) F (1)(2)(3)(4)(5 6)(7 8)(9 10)(11 12) (1 5 7)(2 11 9)(3 4 6)(8 12 10) (1 5 3 4 6 7 12 9 8)(2 11 10)<br />
(Γ12,8;3) 2 4 0 0 (G ∗ ) F (1)(2)(3)(4)(5 6)(7 8)(9 10)(11 12) (1 2 5)(3 10 7)(4 11 8)(6 12 9) (1 2 5 12 8 3 10 6)(4 11 9 7)<br />
(Γ12,35;2) 2 4 0 0 (G) F (1)(2)(3)(4)(5 6)(7 8)(9 10)(11 12) (1 2 5)(3 12 9)(4 10 7)(6 11 8) (1 2 5 11 9 7 6)(3 12 8 4 10)<br />
(Γ12,10;3) 2 4 0 0 (G ∗ ) F (1)(2)(3)(4)(5 6)(7 8)(9 10)(11 12) (1 5 7)(2 10 12)(3 4 6)(8 11 9) (1 5 3 4 6 7 11 2 10 8)(9 12)<br />
(Γ12,11;6) 2 4 0 0 (G ∗ ) F (1)(2)(3)(4)(5 6)(7 8)(9 10)(11 12) (1 5 7)(2 10 8)(3 4 6)(9 11 12) (1 5 3 4 6 7 2 10 11 9 8)(12)<br />
(Γ12,10;5) 2 4 0 0 (G) T (1)(2)(3)(4)(5 6)(7 8)(9 10)(11 12) (1 2 5)(3 10 4)(6 11 8)(7 12 9) (1 2 5 11 9 4 3 10 7 6)(8 12)<br />
(Γ12,35;3) 2 4 0 0 (G) F (1)(2)(3)(4)(5 6)(7 8)(9 10)(11 12) (1 5 7)(2 10 8)(3 6 12)(4 11 9) (1 5 12 9 8)(2 10 4 11 3 6 7)<br />
(Γ12,6;2) 2 4 0 0 (G) F (1)(2)(3)(4)(5 6)(7 8)(9 10)(11 12) (1 2 5)(3 11 4)(6 10 8)(7 12 9) (1 2 5 10 7 6)(3 11 9 8 12 4)<br />
a This column shows if the listed group is a congruence subgroup (T) or not (F).
133<br />
Γµ,l,i h e2 e3 g G ∗ C a σE σR σS<br />
(Γ12,6;3) 2 4 0 0 (G) T (1)(2)(3)(4)(5 6)(7 8)(9 10)(11 12) (1 5 7)(2 11 8)(3 12 9)(4 6 10) (1 5 10 3 12 8)(2 11 9 4 6 7)<br />
(Γ12,11;8) 2 4 0 0 (G) F (1)(2)(3)(4)(5 6)(7 8)(9 10)(11 12) (1 2 5)(3 4 7)(6 8 12)(9 11 10) (1 2 5 8 3 4 7 12 10 11 6)(9)<br />
(Γ12,9;5) 2 4 0 0 (G) F (1)(2)(3)(4)(5 6)(7 8)(9 10)(11 12) (1 2 5)(3 10 8)(4 11 9)(6 7 12) (1 2 5 7 3 10 4 11 6)(8 12 9)<br />
(Γ12,6;4) 2 4 0 0 (G) F (1)(2)(3)(4)(5 6)(7 8)(9 10)(11 12) (1 5 7)(2 12 6)(3 10 8)(4 11 9) (1 5 2 12 9 8)(3 10 4 11 6 7)<br />
(Γ12,8;5) 2 4 0 0 (G) T (1)(2)(3)(4)(5 6)(7 8)(9 10)(11 12) (1 5 7)(2 12 6)(3 8 10)(4 9 11) (1 5 2 12 4 9 3 8)(6 7 10 11)<br />
(Γ12,18;1) 3 2 0 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 2 3)(4 9 6)(5 10 7)(8 11 12) (1 2 3 9 7 11 8 5 4)(6 10)(12)<br />
(Γ12,30;1) 3 2 0 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 2 3)(4 7 9)(5 8 10)(6 12 11) (1 2 3 7 10 4)(5 12 6 8 9)(11)<br />
(Γ12,42;1) 3 2 0 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 2 3)(4 7 11)(5 8 10)(6 9 12) (1 2 3 7 10 12 4)(5 9)(6 8 11)<br />
(Γ12,6;5) 3 2 0 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 11 9)(4 6 7)(8 12 10) (1 3 6)(2 11 10)(4 5 7 12 9 8)<br />
(Γ12,12;21) 3 2 0 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 10 4)(6 11 8)(7 12 9) (1 3 2 10 7 6)(4 5 11 9)(8 12)<br />
(Γ12,42;2) 3 2 0 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 10 12)(4 6 7)(8 11 9) (1 3 6)(2 10 8 4 5 7 11)(9 12)<br />
(Γ12,24;1) 3 2 0 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 10 8)(4 6 7)(9 11 12) (1 3 6)(2 10 11 9 8 4 5 7)(12)<br />
(Γ12,28;1) 3 2 0 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 9 6)(4 10 7)(8 11 12) (1 3 10 6)(2 9 7 11 8 4 5)(12)<br />
(Γ12,4;1) 3 2 0 0 (G) T (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 11 8)(4 10 7)(6 12 9) (1 3 10 6)(2 11 9 7)(4 5 12 8)<br />
(Γ12,24;3) 3 2 0 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 9 4)(6 10 7)(8 11 12) (1 3 2 9 7 11 8 6)(4 5 10)(12)<br />
(Γ12,10;6) 3 2 0 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 2 3)(4 8 10)(5 9 6)(7 12 11) (1 2 3 8 12 7 10 6 9 4)(5)(11)<br />
(Γ12,60;1) 3 2 0 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 11 8)(4 12 9)(6 10 7) (1 3 12 8 6)(2 11 9 7)(4 5 10)<br />
a This column shows if the listed group is a congruence subgroup (T) or not (F).
134<br />
Γµ,l,i h e2 e3 g G ∗ C a σE σR σS<br />
(Γ12,10;7) 3 2 0 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 4 10)(6 11 8)(7 12 9) (1 3 10 7 6)(2 4 5 11 9)(8 12)<br />
(Γ12,30;2) 3 2 0 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 6 8)(4 7 12)(9 11 10) (1 3 7 2 6)(4 5 8 12 10 11)(9)<br />
(Γ12,10;9) 3 2 0 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 6 11)(4 7 8)(9 12 10) (1 3 7 4 5 11 10 12 2 6)(8)(9)<br />
(Γ12,10;10) 3 2 0 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 12 6)(4 7 8)(9 11 10) (1 3 7 4 5 2 12 10 11 6)(8)(9)<br />
(Γ12,6;6) 3 2 0 0 (G) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 11 9)(4 10 8)(6 7 12) (1 3 10 2 11 6)(4 5 7)(8 12 9)<br />
(Γ12,18;2) 3 2 0 0 (G ∗ ) F (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 11 9)(4 12 6)(7 10 8) (1 3 12 9 8 10 2 11 6)(4 5)(7)<br />
(Γ12,8;6) 3 2 0 0 (G) T (1)(2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 11 10)(4 8 6)(7 9 12) (1 3 8 9 2 11 7 6)(4 5)(10 12)<br />
(Γ12,6;7) 4 0 0 0 (G) T (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 4)(2 7 12)(5 8 10)(6 9 11) (1 7 10 11 2 3)(4)(5 9)(6 8 12)<br />
(Γ12,8;7) 4 0 0 0 (G) T (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 4)(2 9 6)(5 10 7)(8 11 12) (1 9 7 11 8 5 2 3)(4)(6 10)(12)<br />
(Γ12,9;6) 4 0 0 0 (G) T (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 4)(2 8 5)(6 9 10)(7 12 11) (1 8 12 7 5 9 6 2 3)(4)(10)(11)<br />
(Γ12,5;1) 4 0 0 0 (G) T (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 12 6)(4 7 8)(9 11 10) (1 12 10 11 6)(2 3 7 4 5)(8)(9)<br />
(Γ12,3;1) 4 0 0 0 (G) T (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 11 9)(4 10 8)(67 12) (1 11 6)(2 3 10)(4 5 7)(8 12 9)<br />
(Γ12,6;8) 4 0 0 0 (G) T (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 5 3)(2 9 11)(4 6 12)(7 8 10) (1 9 7 10 11 4)(2 5 12)(3 6)(8)<br />
(Γ12,4;2) 4 0 0 0 (G) T (1 2)(3 4)(5 6)(7 8)(9 10)(11 12) (1 3 5)(2 11 10)(4 8 6)(79 12) (1 11 7 6)(2 3 8 9)(4 5)(10 12)<br />
a This column shows if the listed group is a congruence subgroup (T) or not (F).
Table 3.2: Eigenvalues on Γ7,10 (2 cusps)<br />
R |c(−1) + 1| a h1<br />
2.98380890177954200 7E-12 2E-15<br />
4.25864509747714400 1E-12 4E-13<br />
4.89540660025545100 2E-13 4E-13<br />
5.28884863158980700 1E-12 6E-14<br />
6.15234838528998200 0E+00 2E-14<br />
6.27199072998424200 2E-13 4E-13<br />
6.76036517325738900 2E-13 2E-13<br />
7.20603858428835700 4E-13 1E-14<br />
7.55764967370570000 4E-13 7E-13<br />
7.77456459246736200 6E-14 3E-14<br />
8.50359685011489000 8E-13 8E-14<br />
8.77366479019266900 3E-13 2E-12<br />
8.88752983993304300 2E-13 2E-14<br />
9.29204073179663000 5E-14 6E-13<br />
9.53369526135354484 * 2E-14 3E-14<br />
9.67736151045037300 4E-13 6E-14<br />
10.04237676924058000 1E-10 2E-08<br />
All newforms listed are odd with respect to the symmetry α : z ↦→ −¯z + 5.<br />
* An oldform from PSL(2,Z).<br />
a See Remark 3.2.6 for an explanation <strong>of</strong> the term 1.<br />
135
Table 3.3: Eigenvalues on Γ9,20;1 (2 cusps)<br />
R |c(−1) − e 2πi<br />
10 | a h1<br />
2.05495976063979 6E-11 1E-15<br />
3.25563226951552 1E-12 2E-14<br />
4.01743421448455 8E-13 1E-12<br />
4.39990456866076 3E-13 9E-12<br />
4.92041181302557 1E-13 5E-14<br />
5.22354223285616 1E-11 6E-11<br />
5.70296517107618 2E-14 3E-13<br />
6.20783400944797 3E-12 6E-12<br />
6.52618304206566 8E-13 2E-12<br />
6.78783029888573 4E-13 5E-14<br />
7.07791461588707 2E-12 1E-14<br />
7.38877048107201 5E-15 8E-13<br />
8.02743455884534 3E-10 3E-09<br />
8.70656893384487 2E-13 7E-10<br />
8.81164911527479 6E-15 9E-13<br />
9.03359858422541 9E-11 3E-10<br />
9.50035839336283 2E-11 4E-11<br />
9.53369526135354 * 5E-09 7E-14<br />
9.66113248208174 3E-11 3E-12<br />
All newforms listed are odd with respect to the symmetry α : z ↦→ −¯z + 4.<br />
* An oldform from PSL(2,Z).<br />
a See Remark 3.2.6 for an explanation <strong>of</strong> the term e 2πi<br />
10 .<br />
136
Table 3.4: Eigenvalues <strong>of</strong> newforms on Γ9,15 (3 cusps)<br />
R |c(−1) + 1| a h1<br />
3.11274526127958 8E-13 2E-15<br />
3.79758314524666 8E-14 1E-14<br />
4.68277129730610 2E-14 3E-11<br />
5.61420134556306 9E-12 3E-11<br />
6.17840605444398 4E-14 1E-10<br />
6.28023134316972 2E-11 4E-10<br />
6.50085225008714 8E-10 2E-10<br />
6.87257413990397 8E-09 6E-10<br />
7.21783938535166 2E-10 9E-10<br />
7.41980107735753 2E-11 4E-11<br />
7.73811611339896 2E-12 4E-12<br />
7.89543101394190 3E-10 1E-10<br />
8.33429557635011 5E-11 6E-09<br />
8.82147607539715 4E-08 2E-10<br />
8.83035851126317 6E-09 2E-08<br />
9.17711548223084 3E-10 7E-10<br />
9.23041542661088 6E-08 3E-09<br />
9.53369526135299 * 4E-09 5E-11<br />
9.73675250028969 3E-09 3E-10<br />
All newforms listed are odd with respect to the symmetry α : z ↦→ −¯z + 3.<br />
* An oldform from PSL(2,Z).<br />
a See Remark 3.2.6 for an explanation <strong>of</strong> the term 1.<br />
137
Table 3.5: Eigenvalues <strong>of</strong> newforms on a cycloidal group <strong>of</strong> index 10<br />
Γ10,10,1<br />
R |c(−1) − e 9πi<br />
5 | a |c(−1) − e 4πi<br />
5 | a h1<br />
1.56460530796110 e 6E-11 3E-15<br />
2.11939343023923 o 1E-11 1E-12<br />
2.50414532509967 e 1E-09 2E-09<br />
2.91592762476298 e 6E-10 3E-14<br />
3.00023468927910 o 2E-11 4E-15<br />
3.10845111145684 o 1E-13 1E-11<br />
3.56237482722476 e 6E-11 2E-15<br />
3.65766022871834 o 1E-12 2E-13<br />
3.88274850431287 o 2E-12 5E-11<br />
4.10694094068138 e 6E-11 2E-14<br />
4.55947270613401 o 4E-12 4E-14<br />
4.74782424736486 o 3E-13 4E-15<br />
4.76752492536872 e 6E-11 2E-14<br />
4.84953817531720 e 1E-10 2E-12<br />
e Even with respect to the symmetry α : z ↦→ −¯z + 9.<br />
o Odd with respect to the symmetry α : z ↦→ −¯z + 9.<br />
a See Remark 3.2.6 for an explanation <strong>of</strong> the terms e 9πi<br />
5 and e 4πi<br />
5 .<br />
138
Table 3.6: Eigenvalues <strong>of</strong> newforms on groups <strong>of</strong> index 10<br />
Γ10,12,1 R |c(−1) − e 2πi<br />
3 | a h1<br />
2.78187318285282 7E-12 5E-16<br />
3.37184320841770 5E-11 7E-12<br />
3.76035106954282 3E-11 8E-12<br />
4.22985717336497 5E-13 6E-15<br />
4.85352368236249 3E-13 1E-12<br />
Γ10,8,1 R |c(−1) − e 3πi<br />
4 | a h1<br />
2.40931877484576 2E-10 3E-14<br />
3.29803900236809 5E-09 2E-10<br />
3.70953186018084 1E-11 3E-13<br />
4.27459659497848 2E-10 6E-11<br />
4.58646680301038 1E-12 2E-11<br />
Γ10,21,2 R |c(−1) − e 3πi<br />
7 | a h1<br />
1.90995590589148 5E-09 2E-14<br />
3.20456049497589 1E-08 6E-13<br />
3.50475869850690 5E-09 4E-12<br />
4.20753581320237 5E-09 6E-11<br />
4.77744371781533 5E-08 8E-10<br />
5.00937515698108 5E-09 3E-11<br />
Γ10,20 R |c(−1) − i| a h1<br />
3.08773394089329578 2E-10 1E-13<br />
3.50709021769279694 7E-10 2E-14<br />
4.34565944211539890 7E-10 3E-13<br />
Γ10,14 R |c(−1) − e 5πi<br />
7 | a h1<br />
2.57440388633114603 0E+00 2E-15<br />
3.79413397458154922 4E-11 2E-14<br />
4.06173226279882993 4E-11 2E-11<br />
4.68613704425140210 3E-11 1E-14<br />
Γ10,30 R |c(−1) − e 3πi<br />
5 | a h1<br />
2.68171983329039 2E-10 4E-16<br />
3.56451256590188 1E-10 4E-15<br />
4.44205124980089 7E-10 1E-12<br />
4.70189370885265 2E-10 1E-14<br />
4.97437106689348 2E-10 2E-15<br />
All newforms listed above are odd with respect to the action <strong>of</strong> J on the groups.<br />
a See Remark 3.2.6 for an explanation <strong>of</strong> the different terms e ·πi<br />
· .<br />
139
4 An Algorithm for Whittaker’s W-function<br />
4.1 Introduction<br />
We present a new algorithm for computing the Whittaker function Wl,iR(x)<br />
based on an integral representation similar to the integral representation <strong>of</strong> the<br />
K-Bessel function,<br />
KiR(x) = 1<br />
∞<br />
e<br />
2 −∞<br />
−xcosht · 1 · e iRt dt.<br />
In our case, the factor “1” in front <strong>of</strong> the exponential, e iRt , in the integrand is<br />
replaced with a confluent hypergeometric function, Ψ, with real parameters<br />
and complex argument. The advantage with this approach is that we avoid the<br />
computationally harder problem <strong>of</strong> evaluating the confluent hypergeometric<br />
functions with complex parameters. We then turn the path <strong>of</strong> the integral to<br />
a path <strong>of</strong> “almost stationary” phase, and the resulting integral turns out to be<br />
well-suited for standard quadrature techniques.<br />
It is clear that for this algorithm to be <strong>of</strong> any practical use we need efficient<br />
algorithms for the confluent hypergeometric function with real parameters.<br />
Fortunately there is an abundance <strong>of</strong> literature on this subject, and we will<br />
present three different methods.<br />
4.2 Presentation <strong>of</strong> the Algorithm<br />
We use the integral formula (cf. [39, p. 374]) to connect the confluent hypergeometric<br />
Ψ−function with complex parameters and real argument (occurring<br />
in the definition <strong>of</strong> the Whittaker W-function) to the same function with com-<br />
plex argument but real parameters:<br />
(2x) s− 1 2 e −x Ψ(s−l,2s;2x) = 1<br />
√ π<br />
∞<br />
0<br />
e −xcosht <br />
Ψ −l; 1<br />
2 ;ξ<br />
<br />
cosh s − 1<br />
<br />
t dt,<br />
2<br />
where ξ = x(1+cosht). The Whittaker W-function, Wl,iR(x), is the decreasing<br />
(as x → ∞) solution to Whittaker’s differential equation<br />
w ′′ <br />
+ − 1 l<br />
+<br />
4 x +<br />
1<br />
4 + R2<br />
x2 <br />
w = 0.<br />
141
We can express Wl,iR in terms <strong>of</strong> the Tricomi confluent hypergeometric function,<br />
Ψ, as (cf. [29, vol I, p. 264 (2)])<br />
Wl,iR(2x) = e −x (2x) 1 2 +iR <br />
1<br />
Ψ + iR − l, 1 + 2iR;2x .<br />
2<br />
With s = 1<br />
2<br />
+ iR we thus get the following integral representation:<br />
<br />
Wl,iR(2x) =<br />
−l; 1<br />
<br />
;x(1 + cosht) cosh[iRt]dt.<br />
2<br />
<br />
2x ∞<br />
e<br />
π 0<br />
−xcosht Ψ<br />
Hence the integral we want to evaluate is:<br />
∞<br />
I = e<br />
0<br />
−xcosht <br />
Ψ −l; 1<br />
<br />
;x(1 + cosht) cos(Rt)dt<br />
2<br />
= 1<br />
∞<br />
e<br />
2<br />
−xcosht <br />
Ψ −l; 1<br />
<br />
;x(1 + cosht) e<br />
2 iRt dt,<br />
that is we define<br />
−∞<br />
I = 1<br />
∞<br />
e<br />
2 −∞<br />
φ(t) ψ(t)dt, (4.1)<br />
where φ(t) = −xcosht + iRt and ψ(t) = Ψ −l; 1<br />
2 ;x(1 + cosht) .<br />
The trick is now to turn the contour out in the complex plane into a path <strong>of</strong><br />
“almost stationary” phase. The argument <strong>of</strong> ψ(t) is slowly varying compared<br />
to the argument <strong>of</strong> e φ(t) , hence a path <strong>of</strong> stationary phase for e φ(t) should<br />
provide a good approximation to the real path <strong>of</strong> stationary phase.<br />
The same integral, but with ψ(t) = e At has been studied extensively by<br />
Helen Avelin [10] in connection with the K-Bessel function and her notes<br />
have been very helpful.<br />
We now have to find the path <strong>of</strong> stationary phase for e φ(t) ; it will depend on<br />
the parameters x and R, or actually (as we will see) on the quotient<br />
4.3 The path<br />
T = R<br />
x .<br />
Along the desired path, the imaginary part <strong>of</strong> φ should be constant, and it<br />
should also pass through the point where the real part <strong>of</strong> φ has a maximum.<br />
This maximum is attained at the solutions <strong>of</strong><br />
142<br />
φ ′ (t) = −xsinht + iR = 0, (4.2)
which are the following points (depending on T ):<br />
<br />
t1 = ln(T +<br />
T ≥ 1 :<br />
√ T 2 − 1) + i π<br />
2 ,<br />
t2 = −ln(T + √ T 2 − 1) + i π<br />
2 ,<br />
T ≤ 1 : t = iarcsinT.<br />
We have to separate these two cases (T ≥ 1 and T ≤ 1), and for numerical<br />
reasons we will also treat the case <strong>of</strong> T ≈ 1 separately. We now view t as a<br />
complex variable, t = u + iv, and thus<br />
φ(t) = φ(u + iv)<br />
= −xcosh(u + iv) + iR(u + iv)<br />
= −x(coshucosv + isinhusinv) − Rv + iRu<br />
= −[xcoshucosv + Rv] − i[xsinhusinv − Ru].<br />
The desired path is determined by the equation<br />
ℑφ = Ru − sinhusinv = [constant], (4.3)<br />
where the constant must be the value <strong>of</strong> ℑφ at the solutions <strong>of</strong> (4.2). The<br />
path can be parametrized by u, hence we will sometimes use the notation<br />
φ(u) = φ(u + iv(u)) and ψ(u) = ψ(u + iv(u)). In the following sections we<br />
will detail the paths for the different cases <strong>of</strong> T .<br />
T ≥ 1 :<br />
There are two solutions <strong>of</strong> (4.2): t1 = u1 + iv1 and t2 = −u1 + iv1, where u1 =<br />
ln(T + √ T 2 − 1) and v1 = π<br />
2 . Hence we must split the path into two parts, but<br />
for numerical reasons we will actually split it into three parts.<br />
Consider first the critical point t1 = u1 + iv1. From (4.3) we see that<br />
ℑφ(u + iv) = ℑφ(v1)<br />
⇔<br />
Ru − xsinhusinv = Ru1 − xsinhu1 sinv1<br />
= Ru1 − xsinhu1 <br />
= Ru1 − x T 2 − 1,<br />
which, with S = Tu1 − √ T 2 − 1 = T ln(T + √ T 2 − 1)− √ T 2 − 1 is equivalent<br />
to<br />
Tu − S<br />
sinv =<br />
sinhu .<br />
143
This equation defines the path that goes through t1, and similarly the equation<br />
sinv =<br />
Tu + S<br />
sinhu<br />
determines the path through t2. We have to be careful now to make sure we get<br />
the correct branch <strong>of</strong> arcsinv. It turns out that we must make different choices<br />
for u < u1 and u > u1. A similar formula will hold for negative u.<br />
Set u0 = S<br />
T , and ∆ = u1 − u0. It can be shown that sinv is decreasing in<br />
[u0,∞) and we cut <strong>of</strong>f the integral at u0 and use the constant value <strong>of</strong> v = v0 = π<br />
between [−u0,u0]. Furthermore, the bulk part <strong>of</strong> the integral seems to be<br />
roughly contained in the interval [u1 − ∆,u1 + ∆] (from numerical experiments).<br />
We thus have five intervals:<br />
]∞,−u1 − ∆], [−u1 − ∆,−u0], [−u0,u0], [u0,u1 + ∆], [u1 + ∆,∞[,<br />
which will be treated separately. In the following sections arcsin always de-<br />
note the principal branch <strong>of</strong> arcsine, i.e. arcsinx ∈ [− π π<br />
2 , 2 ].<br />
In all <strong>of</strong> the intervals we need to find expressions in terms <strong>of</strong> u for the<br />
functions v, dv<br />
du , φ(u) and cosh(u + iv(u)).<br />
The interval u > u1<br />
Here we have<br />
and<br />
dv<br />
du<br />
v = arcsin<br />
<br />
Tu − S<br />
,<br />
sinhu<br />
T sinhu − (Tu − S)coshu<br />
= <br />
sinhu sinh 2 u − (Tu − S) 2<br />
.<br />
It is also clear that cosh(u + iv) = coshucosv + isinhusinv = coshucosv +<br />
i[Tu − S], hence<br />
The interval u < u1<br />
φ(u + iv) = −xcoshucosv − Rv − i[sinhusinv − Ru]<br />
= −xcoshucosv − Rv − i[x(Tu − S) − Ru]<br />
= −xcoshucosv − Rv + ixS.<br />
Note that v1 = π<br />
2 so in this interval we have to change the branch <strong>of</strong> arcsine,<br />
i.e.<br />
<br />
Tu − S<br />
v = π − arcsin ,<br />
sinhu<br />
144
and<br />
dv<br />
du<br />
T sinhu − (Tu − S)coshu<br />
= −<br />
sinhu sinh 2 .<br />
u − (Tu − S) 2<br />
As above, we also have cosh(u + iv) = coshucosv + i[Tu − S], and<br />
The interval −u0 ≤ u ≤ u0<br />
φ(u) = −xcoshucosv − Rv + ixS.<br />
In this interval we keep v = v0 = π constant, hence<br />
and<br />
Here cosh(u + iv) = −coshu, and<br />
v = π,<br />
dv<br />
= 0.<br />
du<br />
φ(u) = −xcoshucosπ − Rπ + iRu = −Rπ + xcoshu + iRu.<br />
The interval −u1 ≤ u ≤ u0<br />
Since we have π<br />
2 ≤ v ≤ π here also we have to stick to the same branch <strong>of</strong><br />
arcsine, hence<br />
<br />
Tu + S<br />
v = π − arcsin ,<br />
sinhu<br />
and<br />
dv<br />
du<br />
T sinhu − (Tu + S)coshu<br />
=<br />
sinhu sinh 2 .<br />
u − (Tu + S) 2<br />
We get cosh(u + iv) = coshucosv + i[Tu + S], and<br />
φ(u+iv) = −xcoshucosv−Rv−i[x(Tu+S)−Ru] = −xcoshucosv−Rv−ixS.<br />
The interval u ≤ −u1<br />
Now v ≤ π<br />
2 and we can get back to the principal branch:<br />
and<br />
dv<br />
du<br />
v = arcsin<br />
<br />
Tu + S<br />
,<br />
sinhu<br />
T sinhu − (Tu + S)coshu<br />
= −<br />
sinhu sinh 2 .<br />
u − (Tu + S) 2<br />
145
We have cosh(u + iv) = coshucosv + i[Tu + S], and<br />
T ≤ 1 :<br />
φ(u + iv) = −xcoshucosv − Rv − i[xsinhusinv − Ru]<br />
= −xcoshucosv − Rv − i[x(Tu + S) − Ru]<br />
= −xcoshucosv − Rv − ixS.<br />
If T ≤ 1 we define T = R<br />
x = sinα, and we can see that φ ′ (t) = 0⇔ t = iα, that<br />
is, the stationary point is on the imaginary axis. We also see that φ ′′ (iα) =<br />
−xcosh(iα) = −xcosα = −x √ 1 − T 2 = − √ x 2 − R 2 ≤ 0. Since the point t =<br />
iα is a maximum (i.e. φ ′′ (iα) < 0) we see that there might be trouble as<br />
T → 1; numerically it turns out that a safe restriction is<br />
|R − x| > 5 2 3 R 1 3 ,<br />
and for |R − x| < 5 2 3 R 1 3 we will use the path in the next section instead. The<br />
path <strong>of</strong> stationary phase that passes through iα is given by ℑφ(u + iv) =<br />
ℑφ(iα) ⇔ Ru − xsinhusinv = 0, that is<br />
and<br />
dv<br />
du<br />
sinv = Ru Tu<br />
=<br />
xsinh sinhu ,<br />
sinhu − ucoshu<br />
= ±R<br />
sinhu (xsinhu − Ru)(xsinhu + Ru) ,<br />
where +is for u > 0 and − for u < 0. We also have<br />
and<br />
The case T ≈ 1 :<br />
cosh(u + iv) = coshucosv + iTu,<br />
φ(u) = iR(u + iv) − xcoshucosv<br />
= −xcoshucosv − Rv + i[−xsinhusinv + Ru]<br />
= −xcoshucosv.<br />
This case is considered separately because <strong>of</strong> the numerical reasons hinted at<br />
above, and we will treat T close to 1 as if exactly 1. If we didn’t do that we<br />
might for example end up with sinv > 1. The test used to indicate that T is<br />
close to 1 is that<br />
|x − R| < min( R<br />
3 ,52 3 R 1 3 ).<br />
146
We get<br />
and as before<br />
and<br />
sinv = u<br />
sinhu ,<br />
dv<br />
du =<br />
sinhu − ucoshu<br />
sinhu (sinhu − u)(sinhu + u) ,<br />
φ(u) = −xcoshucosv − Rv + i[−xsinhusinv + Ru]<br />
= −xcoshucosv − Rv + iu[R − x].<br />
We also get cosh(u + iv) = coshucosv + iu.<br />
4.4 The integrand<br />
When we review the previous sections, we see directly that in all cases we<br />
have v(−u) = v(u), dv dv<br />
du (−u) = du (u) and φ(−u) = φ(−u). Using<br />
cosh(−u + iv) = cosh(u + iv),<br />
and the fact that we see that Ψ is analytic in its third argument we have<br />
<br />
ψ(−u) =Ψ −l, 1<br />
<br />
,x(1 + cosh(−u + iv(−u)) = Ψ −l,<br />
2 1<br />
<br />
,x(1 + cosh(u + iv)<br />
2<br />
=ψ(u).<br />
Note that when using this formula we must be careful since Ψ is also in general<br />
multi-valued in its third argument (e.g. Ψ − 1 1<br />
2 , 2 ,z = √ z). It is customary to<br />
use the principal branch, i.e. with a branch-cut along the negative real-axis,<br />
but in the case T ≥ 1 however, the argument x(1 + cosh(−u + iv(−u)) passes<br />
through the negative real axis at u = ±u0 and we must make sure we get the<br />
correct branch choice.<br />
We thus have the following reflectional symmetries:<br />
v(−u) = v(u),<br />
dv<br />
(−u)<br />
du<br />
=<br />
dv<br />
du ,<br />
φ(−u) = φ(u),<br />
ψ(−u) = ψ(u),<br />
and using these we can rewrite the complex integral (4.1) as a real integral. To<br />
147
simplify the following equations we introduce the notation<br />
where<br />
We now have<br />
I = 1<br />
2<br />
= 1<br />
2<br />
= 1<br />
2<br />
= 1<br />
2<br />
=<br />
=<br />
∞<br />
−∞<br />
∞<br />
−∞<br />
0<br />
−∞<br />
∞<br />
0<br />
∞<br />
0<br />
∞<br />
0<br />
e φ(u) ψ(u) = P(u) = R(u)e iΘ(u) ,<br />
Θ(u) = ℑφ(u) + Argψ(u), and<br />
R(u) = |ψ(u)|e ℜφ(u) .<br />
e φ(t) ψ(t)dt<br />
<br />
P(u) 1 + i dv<br />
<br />
du<br />
du<br />
<br />
P(u) 1 + i dv<br />
<br />
du +<br />
du<br />
1<br />
<br />
∞<br />
P(u) 1 + i<br />
2 0<br />
dv<br />
<br />
du<br />
du<br />
<br />
P(−u) 1 − i dv<br />
<br />
+ P(u) 1 + i<br />
du<br />
dv<br />
<br />
du<br />
du<br />
1<br />
i<br />
dv<br />
(P(u) + P(−u)) + (P(u) − P(−u))<br />
2 2 du du<br />
<br />
R(u) cos(Θ(u)) − sin(Θ(u)) dv<br />
<br />
du,<br />
du<br />
which is now a completely real integral. When we split it up for the different<br />
cases we get explicit expressions for the various factors.<br />
T ≥ 1 :<br />
Here we have<br />
where now<br />
and<br />
148<br />
I1 =<br />
u0<br />
0<br />
= e −Rπ<br />
I =<br />
u0<br />
0<br />
= I1 + I2,<br />
∞<br />
+<br />
u0<br />
<br />
R(u) cos(Θ(u)) − sin(Θ(u)) dv<br />
<br />
du<br />
du<br />
u0<br />
0<br />
e xcoshu |ψ(u)|{cos(Ru + Argψ(u))}du,<br />
<br />
∞<br />
I2 = R(u) cos(Θ(u)) − sin(Θ(u))<br />
u0<br />
dv<br />
<br />
du,<br />
du
where <br />
Θ(u) = xS + Argψ(u),<br />
T ≤ 1 :<br />
Here<br />
T ≈ 1 :<br />
I =<br />
=<br />
=<br />
−∞<br />
∞<br />
∞<br />
−∞<br />
∞<br />
0<br />
∞<br />
0<br />
<br />
P(u)<br />
R(u)<br />
e φ(u) |ψ(u)|<br />
R(u) = |ψ(u)|e −xcoshucosv−Rv .<br />
1 + i dv<br />
du<br />
The relevant integral is given by<br />
<br />
∞<br />
I = P(u) 1 + i dv<br />
<br />
du =<br />
du<br />
=<br />
=<br />
0<br />
∞<br />
0<br />
R(u)<br />
e φ(u) |ψ(u)|<br />
<br />
du =<br />
<br />
cos(Θ(u)) − sin(Θ(u)) dv<br />
du<br />
<br />
du.<br />
<br />
cos(Argψ(u)) − sin(Argψ(u)) dv<br />
<br />
du.<br />
du<br />
<br />
cos(Θ(u)) − sin(Θ(u)) dv<br />
du<br />
<br />
du.<br />
<br />
cos(uδ + Argψ(u)) − sin(uδ + Argψ(u)) dv<br />
<br />
du.<br />
du<br />
These integrals we have obtained can now be dealt with using standard<br />
methods for numerical integration, e.g. Gaussian quadrature once we have<br />
satisfying algorithms to compute the function ψ.<br />
T ≥ 1 :<br />
Here we have<br />
where now<br />
I1 =<br />
u0<br />
0<br />
= e −Rπ<br />
I =<br />
u0<br />
0<br />
= I1 + I2,<br />
∞<br />
+<br />
u0<br />
<br />
R(u) cos(Θ(u)) − sin(Θ(u)) dv<br />
<br />
du<br />
du<br />
u0<br />
0<br />
e xcoshu |ψ(u)|{cos(Ru + Argψ(u))}du,<br />
149
and<br />
<br />
∞<br />
I2 = R(u) cos(Θ(u)) − sin(Θ(u))<br />
u0<br />
dv<br />
<br />
du,<br />
du<br />
where <br />
Θ(u) = xS + Argψ(u),<br />
T ≤ 1 :<br />
Here<br />
T ≈ 1 :<br />
I =<br />
=<br />
=<br />
−∞<br />
∞<br />
∞<br />
−∞<br />
∞<br />
0<br />
∞<br />
0<br />
<br />
P(u)<br />
R(u)<br />
e φ(u) |ψ(u)|<br />
R(u) = |ψ(u)|e −xcoshucosv−Rv .<br />
1 + i dv<br />
du<br />
The relevant integral is given by<br />
<br />
∞<br />
I = P(u) 1 + i dv<br />
<br />
du =<br />
du<br />
=<br />
=<br />
0<br />
∞<br />
0<br />
R(u)<br />
e φ(u) |ψ(u)|<br />
<br />
du =<br />
<br />
cos(Θ(u)) − sin(Θ(u)) dv<br />
du<br />
<br />
du.<br />
<br />
cos(Argψ(u)) − sin(Argψ(u)) dv<br />
<br />
du.<br />
du<br />
<br />
cos(Θ(u)) − sin(Θ(u)) dv<br />
du<br />
<br />
du.<br />
<br />
cos(uδ + Argψ(u)) − sin(uδ + Argψ(u)) dv<br />
<br />
du.<br />
du<br />
These integrals we have obtained can now be dealt with using standard<br />
methods for numerical integration, e.g. Gaussian quadrature once we have<br />
satisfying algorithms to compute the function ψ.<br />
4.5 Evaluation <strong>of</strong> the Integrand<br />
As a final step to be able to evaluate the integrals in the previous section we<br />
need efficient algorithms for the function Ψ −l; 1<br />
2 ,z where l is real and z is<br />
a complex number. In most papers on numerical algorithms for Ψ(a,c,z) the<br />
values <strong>of</strong> z are restricted to the reals, cf. e.g. [96]. Algorithms without this<br />
restriction can be found in e.g. [102].<br />
150
In this chapter we will outline the three different approaches which seems<br />
to yield the most efficient algorithms in different z-domains. The methods<br />
include power-series for small |z|, backward-recursion for middle range |z|<br />
and an asymptotic series expansion for large |z|. Each <strong>of</strong> them is evaluated to<br />
at least 12-14 significant digits in the relevant interval.<br />
It should also be noted that for the special case when l = 1<br />
2 (which will be<br />
used later) we have <br />
Ψ − 1 1<br />
,<br />
2 2 ,z<br />
<br />
= √ z,<br />
and another special case is (<strong>of</strong> course) weight 0, that is l = 0, where we have<br />
for all c<br />
Ψ[0,c,z] = Φ[0,c,z] = 1.<br />
These special cases can be easily deduced from the power series expression in<br />
the next subsection.<br />
4.5.1 The power series<br />
It is known that we can express Ψ as a sum <strong>of</strong> two Φ functions (cf. [99, p. 20]<br />
or [29, p. 257]):<br />
Ψ(a,c,z) =<br />
Γ(1 − c)<br />
Γ(c − 1)<br />
Φ(a,c,z) + z<br />
Γ(a − c + 1) Γ(a)<br />
1−c Φ(a − c + 1,2 − c,z),<br />
hence we actually only need an algorithm for Φ (the algorithm for Γ, using<br />
Stirling’s formula is standard). We know that Φ has a power-series expansion<br />
valid for all a, z and c not a negative integer (if c is a negative integer it is valid<br />
if a = c)<br />
Φ(a,c,z) =<br />
∞<br />
∑<br />
n=0<br />
(a)n<br />
where (a)n is the Pochammer symbol, defined as (a)k = a(a+1)···(a+k−1),<br />
for a complex (not a negative integer > −k +1) and k a positive integer. It can<br />
also be written as (a)k = Γ(a+k)<br />
Γ(a) . We see that for non-exceptional a and c (i.e.<br />
c not very close to a negative integer) the power series should converge in a<br />
similar manner as the power series for the exponential function. A few special<br />
(c)n<br />
z n<br />
n! ,<br />
151
cases worth mentioning are<br />
Φ(0,c,z) = 1,<br />
Φ(a,a,z) = e z ,<br />
Φ(−1, 1<br />
,z)<br />
<br />
2<br />
Φ 1,<br />
= 1 − 2z,<br />
1<br />
2 ,z<br />
<br />
= √ π<br />
∞<br />
∑<br />
n=0<br />
z n<br />
Γ 1<br />
2 + n.<br />
To evaluate the power series one can use for example a direct formula, recursion,<br />
or a continued-fraction method (c.f. [71, p. 185]). We set<br />
A−1 = A0 = 1, A1 = 1 + az<br />
c ,<br />
ri =<br />
(a + i − 1)<br />
, i > 1,<br />
i(c + i − 1)<br />
Ai = Ai−1 + (Ai−1 − Ai−2)riz, for i > 1.<br />
Then the i − thapproximation to Φ(a,c,z) is given by Ai, and we quit the<br />
summation whenever |Ai − Ai−1| < ε.<br />
The special case <strong>of</strong> c = 1<br />
2<br />
Since what we in general want to evaluate is Ψ(a, 1<br />
2 ,z) we can formulate the<br />
specific formula for this case,<br />
<br />
Ψ a, 1<br />
2 ,z<br />
<br />
Γ<br />
=<br />
<br />
1<br />
2<br />
Γ a + 1<br />
<br />
Φ a,<br />
2<br />
1<br />
2 ,z<br />
<br />
+ Γ− 1<br />
<br />
2 √<br />
zΦ a +<br />
Γ(a)<br />
1 3<br />
,<br />
2 2 ,z<br />
<br />
Γ<br />
=<br />
<br />
1<br />
2<br />
Γ a + 1<br />
∞ (a)n<br />
∑ <br />
1<br />
2 n=0 2 n n!zn + Γ− 1<br />
<br />
2 √ ∞ 1 a + 2<br />
z<br />
Γ(a) ∑ n<br />
zn<br />
3<br />
n=0 2 n! n<br />
Γ<br />
=<br />
<br />
1<br />
2<br />
Γ a + 1<br />
∞ Γ(a + n)Γ<br />
∑<br />
2 n=0<br />
<br />
1<br />
2<br />
Γ(a)Γ 1<br />
2 + nΓ(n + 1) zn<br />
+ Γ− 1<br />
<br />
2 √ ∞ Γ<br />
z<br />
Γ(a) ∑<br />
n=0<br />
a + 1<br />
2 + nΓ <br />
3<br />
2<br />
Γ a + 1<br />
<br />
3<br />
2 Γ 2 + nΓ(n + 1) zn<br />
Γ<br />
=<br />
<br />
1 2<br />
2<br />
Γ a + 1<br />
<br />
∞<br />
∑ Γ(a + n) −<br />
2 Γ(a) n=0<br />
√ z Γa + 1<br />
<br />
2 + n<br />
×<br />
1<br />
2 + n<br />
×<br />
z n<br />
Γ(n + 1)Γ n + 1<br />
.<br />
2<br />
This sum can now be evaluated by any standard method. Define<br />
152<br />
an =<br />
Γ(a + n)<br />
Γ(n + 1)Γ n + 1<br />
, bn =<br />
2<br />
Γ a + 1<br />
2<br />
Γ(n + 1)Γ n + 1<br />
2<br />
+ n<br />
<br />
1<br />
2 + n,
and compute the sum<br />
∞ <br />
∑ an −<br />
n=0<br />
√ n<br />
zbn z .<br />
Since the an and bn are independent <strong>of</strong> z and this sum is evaluated many times<br />
it is preferable to make a table <strong>of</strong> an and bn. These can either be computed<br />
by recursion to get good speed, or since we need only tabulate them once by<br />
direct evaluation.<br />
Reflection<br />
The power series is obviously valid in a circular region in the plane, but experimentally<br />
it seems more efficient to use Kummer’s transformation for values<br />
<strong>of</strong> z in the left half-plane:<br />
Φ(a,c,z) = e z Φ(c − a,c,−z),<br />
which gives the following formula for Ψ:<br />
Ψ(a,c,−z) =<br />
e −z<br />
<br />
Γ(1 − c)<br />
Γ(c − 1)<br />
Φ(c − a,c,z) + (−z)1−c Φ(1 − a,2 − c,z) ,<br />
Γ(a − c + 1) Γ(a)<br />
where Φ can be evaluated as above.<br />
4.5.2 Recursion<br />
It is well-known that both confluent hypergeometric functions satisfy many<br />
recursion relations (cf. [29, pp. 254, 257-258]), and one can use these to<br />
formulate recurrence equations, cf. e.g. [96, pp. 64-65]. If we set un =<br />
(a)nΨ(a + n,c,z) we get the following equation:<br />
(a + n − 1)un−1 + (c − 2a − z − 2n)un + (a + n + 1 − c)un+1 = 0, (4.4)<br />
which is valid for all values <strong>of</strong> a,c,z and for all integers n ≥ 1. What we want<br />
to compute is now u0, the first term in the recursion, hence we can’t use regular<br />
forward-recursion. What we have to do is basically to start with some values<br />
<strong>of</strong> uN and uN−1 and then go backwards. The standard way to do this is by a so<br />
called Miller algorithm (cf. e.g. [32, 73, 74] or in this particular case [96] and<br />
[102]). In order to use this kind <strong>of</strong> algorithm we need a normalization, and in<br />
this case we use<br />
S =<br />
∞<br />
∑ λnun = z<br />
n=0<br />
−a ,<br />
153
where λn = (−1) n<br />
<br />
c − a − 1<br />
n<br />
<br />
= (−1) n Γ(c−a)<br />
Γ(c−a−n)n! . This follows from the<br />
binomial theorem for general exponents. What we do next is to rewrite the<br />
recursion equation (4.4) as<br />
where<br />
an =<br />
un+1 + anun + bnun−1 = 0,<br />
c − 2a − z − 2n<br />
1 + n + a − c<br />
and bn =<br />
a + n − 1<br />
1 + n + a − c .<br />
There are several choices in the implementation and the one we use is basically<br />
[32, p. 37]. This is actually a continued-fraction method for the quotients<br />
un+1/un. For a fixed positive integer N > 0 we set<br />
and then recursively set<br />
s (N)<br />
N<br />
r (N)<br />
n−1 =<br />
= r(N)<br />
N<br />
−bn<br />
an + rn<br />
= 0,<br />
, and<br />
s (N)<br />
n−1 = rn−1(λn + s (N)<br />
n ),<br />
for n = N,N − 1,N − 2,...1. In the final step we get an approximation to u0:<br />
u (N)<br />
0 =<br />
S<br />
λ0 + s (N)<br />
0<br />
To get an approximation to u0 with an error smaller than ε we choose a starting<br />
integer M and repeat the process for the sequence <strong>of</strong> N = M,M +1,... and stop<br />
when the difference |u (N)<br />
0 − u(N+1)<br />
0 | < ε. To avoid unnecessary computations<br />
the choice <strong>of</strong> M is important, and should be tabulated in advance.<br />
Note that λn satisfies a recursion relation: λ0 = 1, and λn = − c−a−n<br />
n λn−1,<br />
and if we compute {λ j} M 1 in advance we only need to compute an additional<br />
λN in each step.<br />
From the formula for an and bn we see that the only points we should avoid<br />
are those where 1 + a − c is a negative integer. Hence this method should be<br />
used for the sake <strong>of</strong> precision when c is close to an integer but 1 + a − c is not<br />
a negative integer.<br />
154<br />
.
4.5.3 Asymptotic series<br />
The following asymptotic expansion for Ψ is well-known (see [29, p. 278])<br />
Ψ(a,c,z) =z −a<br />
<br />
N<br />
∑ (−1)<br />
n=0<br />
n (a)n(a − c + 1)n<br />
n!zn + O(z −N−1 <br />
) , as |z| → ∞,<br />
for |Argz| ≤ 3π<br />
2 ,<br />
and when evaluated by forward-recursion on the coefficients the convergence<br />
is fast for large |z|. As is usual when evaluating asymptotic series we sum<br />
the series up to the term N = N0 where the terms starts to increase in absolute<br />
value.<br />
4.5.4 Comparison<br />
We made a spot-check <strong>of</strong> the methods for computing Ψ(−l, 1<br />
2<br />
,x + iy) over<br />
a grid where |l| ≤ 1 and 1 ≤ x ≤ 100 and for each (l,x) we let y vary between<br />
1 and lnx to simulate the behaviour <strong>of</strong> cosh(x + iy) at the paths above,<br />
where basically the imaginary part is sinvsinhu = O(u) and the real part is<br />
cosvcoshu = O(eu ). In this region we first <strong>of</strong> all compared the three methods<br />
with each other with respect to speed and we also made spot-check against<br />
Maple and PARI (with internal precision set to 100 decimal places). We found<br />
that the program was accurate up to 12-13 significant digits in the entire region<br />
when we choose the algorithms as follows:<br />
0 ≤ x ≤ 25 Power series<br />
25 ≤ x ≤ 35 Recursion<br />
35 ≤ x Asymptotic series<br />
It should be noted that the recursive algorithm actually provides 12-13 decimal<br />
places (depending on the termination condition <strong>of</strong> course) for x ≥ 0.1, but is<br />
in general very slow for small x. By further sporadic spot-checking we also<br />
drew the conclusion that the Asymptotic series is accurate up to at least 12-<br />
13 decimal places when |z| ≥ 35. Negative values <strong>of</strong> x was checked against<br />
positive values by the reflection relation stated above that relates Ψ(a,c,−x)<br />
with Ψ(a,c,x).<br />
4.6 Evaluation <strong>of</strong> the Integrals<br />
The infinite integrals I were first truncated to finite integrals using the fact that<br />
,x) grows at most like a polynomial in x <strong>of</strong> degree ≤ |l| and that eℜφ<br />
Ψ(−l, 1<br />
2<br />
155
is decreasing like e−ex. To obtain the bound on Ψ(−l, 1<br />
2 ,x) study the integral<br />
representation<br />
Ψ(−l, 1<br />
<br />
1 ∞<br />
,x) = e<br />
2 Γ(−l) 0<br />
−xt t −l−1 (1 +t) l− 1 2 dt,<br />
do a variable substitution u = xt and compare with the integral representation<br />
and known bounds for the Γ function.<br />
The actual bounds we use are verified by the numerical experiments. The<br />
finite interval is then divided up in to smaller intervals (according to the value<br />
<strong>of</strong> R) and on each <strong>of</strong> the smaller intervals we evaluate the integral using a<br />
16-point Gaussian quadrature rule.<br />
4.7 Remarks on the K-Bessel function<br />
We know that the special case l = 0 in Wl,iR(x) gives us essentially the K-<br />
Bessel function, KiR(x) (i.e. W0,iR(2x) =<br />
2x<br />
π KiR(x)). The algorithm de-<br />
scribed in this paper is then identical to Hejhal’s algorithm ([42]), generalized<br />
by Avelin to Ks(x) for complex s ([9]).<br />
Note that<br />
KiR(x) =<br />
<br />
π<br />
2x e−x (2x) 1 2 +iR <br />
1<br />
Ψ + iR,1 + 2iR;2x ,<br />
2<br />
but even though the arguments to the Ψ−function are complex it turns out that<br />
in this special case most <strong>of</strong> the algorithms we used to compute the Ψ-function<br />
with real arguments can be trivially modified and actually show good convergence<br />
properties. Hence we can use both the backwards recursion (Millertype)<br />
algorithm and the power series to compute the K-Bessel function.<br />
One particularly nice power series method for K-Bessel function is the following.<br />
From the expression <strong>of</strong> KiR as a sum <strong>of</strong> IrR and I−iR it is easy to see the<br />
power series defining KiR from the known power series for IiR. From [33, pp.<br />
399-400], and breaking out the dominating factors from the expansion we see<br />
that<br />
with<br />
156<br />
1 π<br />
KiR(x) =<br />
|Γ(1 + iR)| 2sinh(πR)<br />
fk = −i|Γ(1 + iR)|<br />
∞<br />
∑ ck fk<br />
k=0<br />
<br />
x −iR<br />
2<br />
Γ(k + 1 − iR) −<br />
<br />
x iR<br />
<br />
2<br />
Γ(k + 1 + iR)
and<br />
and<br />
rk = R|Γ(1 + iR)|<br />
<br />
x −iR<br />
2<br />
Γ(k + 1 − iR) +<br />
<br />
x iR<br />
<br />
2<br />
Γ(k + 1 + iR)<br />
,<br />
ck = 1<br />
k!<br />
x 2<br />
4<br />
k<br />
.<br />
The recursive relations are not affected by this scaling and are still<br />
fk = k fk−1 + rk−1<br />
k2 + R2 rk =<br />
1<br />
k2 + R2 [(2k − 1)rk−1 − rk−2]<br />
ck = x2 ck−1<br />
4 k<br />
for k ≥ 1 where the initial data now are<br />
f0 = −2sinθ,<br />
r0 = 2Rcosθ, and<br />
r1 =<br />
R<br />
(cosθ + Rsinθ)<br />
1 + R2 with θ = Rln( x<br />
2 ) − ArgΓ(1 + iR). Now we can just compute the sum by standard<br />
forward-recursion and multiply with the Γ and sinh factors at the end.<br />
(And for large R avoid cancellation and division by infinity by simply take<br />
both factors into account simultaneously). (See also [98, pp. 377-379].)<br />
4.8 Numerical verification<br />
The numerical verification <strong>of</strong> the algorithm has been done by comparing the<br />
values <strong>of</strong> Wl,iR(x) against Maple with 25 digits precision. The comparison has<br />
been done over 2 separate grids in the (R,x,l) space:<br />
1. 200000 pseudo random points (Ri,xi,li) in the cube<br />
[0,20] × [0,20] × [0,6], and<br />
2. 100000 pseudo random points (Ri,xi,li) in the cube<br />
[20,100] × [0,20] × [0,6].<br />
The reason for the choice <strong>of</strong> [0,6] as the l-interval is because that is the range<br />
we will use in the application <strong>of</strong> this algorithm to the problem <strong>of</strong> computing<br />
<strong>Maass</strong> <strong>waveforms</strong> with nonzero weight.<br />
157
We consider the relative errors<br />
εi = Wli,iRi (xi) Fortran −Wli,iRi (xi) Maple <br />
Wli,iRi (xi) Maple −1<br />
as corresponding to a set <strong>of</strong> (pseudo)random variables. As such we consider<br />
their mean and variance, apart from the obvious study <strong>of</strong> their absolute maximum.<br />
We also consider the mean and standard deviance <strong>of</strong> the absolute values<br />
|εi|.<br />
1. In the first grid we have<br />
2. In the second grid we have<br />
max{|εi|} = 5.3E − 10,<br />
mean{εi} = −2.0E − 15,<br />
mean{|εi|} = 4.2E − 14,<br />
std{|εi|} = 3.5E − 12,<br />
std{εi} = 3.5E − 12.<br />
max{|εi|} = 1.7E − 09,<br />
mean{εi} = 2.2E − 14,<br />
mean{|εi|} = 8.1E − 14,<br />
std{|εi|} = 5.5E − 12,<br />
std{εi} = 5.5E − 12.<br />
In connection with this it might also be enlightening to know that CPU time<br />
required for Maple to make the computations over the first grid is approximately<br />
27 hours, where my Fortran program only need about 15 minutes (on<br />
a 1533MHz CPU). Over the second grid the needed CPU times are approximately<br />
25h45m for Maple and 33m for Fortran (on a 1533MHz CPU). These<br />
figures are not exact since there were other programs running simultaneously<br />
on this computer too, but they serve well as a hint <strong>of</strong> the effectiveness <strong>of</strong> the<br />
algorithm.<br />
158<br />
,
Swedish Summary<br />
<strong>Maass</strong>vågfunktioner ur ett beräkningsperspektiv<br />
Detta är en avhandling i experimentell matematik, och vi befinner oss således<br />
i en situation där den “rena” matematiken drar nytta av numeriska resultat för<br />
att bygga hypoteser.<br />
En kortfattad beskrivning av vad som kännetecknar experimentell matematik<br />
är att man med hjälp av teoretiska resonemang konstruerar numeriska<br />
modeller (algoritmer) vilka sedan används för att generera information. Utifrån<br />
de numeriska resultaten bygger man sedan upp hypoteser och förmodanden<br />
(för en mer detaljerad beskrivning se [16]).<br />
Förhoppningen är naturligtvis att hypoteserna sedan skall kunna bevisas<br />
strikt matematiskt, men även i de fall då det nuvarande matematiska maskineriet<br />
inte förmår detta kan de numeriska resultaten ge värdefulla insikter<br />
och inspirera till fortsatta studier.<br />
Avhandlingens tre huvudkapitel är alla utformade på samma sätt; merparten<br />
ägnas åt att presentera den teori som sedan används för att konstruera algoritmer.<br />
Efter en beskrivning av hur algoritmerna kan utformas presenteras de<br />
experimentella resultat vi kommit fram till.<br />
Det problem vi studerat är att konstruera de matematiska objekt som kallas<br />
“<strong>Maass</strong>vågfunktioner” (efter Hans <strong>Maass</strong> (1911-1992)). Matematiska tillämpningar<br />
av dessa vågfunktioner finns främst inom analytisk talteori. Det finns<br />
även fysikaliska kopplingar, främst då till matematiska modeller av kvantkaos<br />
([35, 14]), men även till kosmologi ([8]).<br />
Något om den fysikaliska bakgrunden<br />
Betrakta en (kvantmekanisk) partikel med massa m0 som rör sig fritt på en<br />
yta, S . Enligt kvantmekaniken beskrivs detta system av en vågfunktion, ψ,<br />
vilken talar om för oss hur stor sannolikheten är att påträffa partikeln i ett visst<br />
område. Vågfunktionens utbredning, för en partikel med energin E = ¯hv, ges<br />
i sin tur av Schrödingerekvationen:<br />
i¯h ∂ψ<br />
∂t<br />
¯h2<br />
= − ∆ψ = Eψ,<br />
2m0<br />
159
där ∆ är den så kallade Laplace-Beltramioperatorn på ytan. (T.ex. ges den i<br />
planet av ∆ψ = ψ ′′<br />
xx + ψ ′′<br />
yy). Vi antar nu att det går att skriva ψ som en produkt<br />
av en tidsberoende del, e−ivt , och en tidsoberoende del, φ(P), P ∈ S . Vi<br />
får då en ekvation för den tidsoberoende delen (den tidsoberoende Schrödingerekvationen,<br />
eller Laplaces ekvation):<br />
∆φ + λφ = 0, (⋆)<br />
där vi har satt λ = 2m0E<br />
¯h 2 (egenvärdet), och eftersom sannolikheten för att partikeln<br />
befinner sig på ytan är ett måste vi dessutom ha<br />
<br />
|φ| 2 dP = 1.<br />
S<br />
Om partikeln är laddad och vi kopplar på ett konstant magnetiskt fält, B, på<br />
ytan kommer den tidsoberoende delen av vågfunktionen att få ett “tvist” (spin)<br />
och φ måste nu uppfylla en variant av Laplaces ekvation:<br />
∆Bφ + λφ = 0, (⋆⋆)<br />
där ∆B är en modifierad Laplaceoperator, (i vårt fall blir den ∆B = ∆ − iyB ∂<br />
∂x<br />
med B proportionell mot den magnetiska fältstyrkan).<br />
Observera att vågekvationen, (⋆) är “universell”, i den meningen att den<br />
beskriver många olika former av vågrörelse. T.ex. om S får beskriva ett<br />
trumskinn, så kommer (⋆) att beskriva utseendet hos en stående våg på trumskinnet,<br />
med en frekvens proportionell mot √ λ. Bastoner svarar alltså mot<br />
små värden på λ och ljusare toner mot högre värden på λ.<br />
I den här avhandlingen betraktar vi ekvationerna (⋆) och (⋆⋆) för vissa<br />
speciella ytor S , nämligen sådana med konstant negativ krökning (vi säger<br />
att ytan är hyperbolisk), ändlig area samt ett ändligt (positivt) antal “punkteringar”<br />
eller “spetsar” (dvs vi har plockat bort ett ändligt antal punkter från<br />
ytan och “dragit ut dem” till oändligheten). Dessutom måste ytorna vara<br />
speciella på ett “aritmetiskt” sätt, vilket i det här fallet betyder att de ges av en<br />
delgrupp till den modulära gruppen. Vi tillåter också ytor med en sorts “hörn”.<br />
Lösningarna till (⋆) och (⋆⋆) på sådana ytor kallas för <strong>Maass</strong>vågfunktioner.<br />
En orsak till att hyperboliska ytor, är intressanta i detta sammanhang är<br />
att den klassiska dynamiken för en fri partikel på sådana är (starkt) kaotisk.<br />
Genom att studera lösningarna till (⋆) på en sådan yta kan vi sålunda komma<br />
till insikt om det finns “spår” av detta klassiska kaos kvarlämnat i det kvantiserade<br />
systemet. Denna typ av undersökningar är en del av det forskningsområde<br />
som kallas kvantkaos. Då vågfunktionerna i sig inte är kaotiska visar sig<br />
det klassiska kaoset i bl.a. energinivåernas (egenvärdenas) fördelning samt<br />
utseendet hos de vågfunktioner φ som svarar mot höga energier. I Figur 2<br />
ser du ett exempel på en <strong>Maass</strong>vågfunktion, ϕ med ett egenvärde λ ≈ 10000.<br />
160
(a) visar nodlinjerna (dvs. de punkter där ϕ(z) = 0), och i (b) kan du se sannolikhetsfunktionen<br />
som associeras till ϕ, dvs |ϕ(z)| 2 . De ljusa områdena i<br />
(b) visar de platser i planet där den kvantmekaniska partikeln gärna hänger<br />
omkring.<br />
Det huvudsakliga syftet med arbetet som ligger till grund för denna avhandling<br />
var att ta fram stabila algoritmer för att beräkna egenvärden, λ, samt<br />
motsvarande vågfunktioner, φ, till ovanstående problem.<br />
Kort om Hyperbolisk Geometri<br />
För att åskådliggöra negativ krökning (hyperbolisk geometri) brukar man som<br />
matematiker arbeta i t.ex. övrehalvplansmodellen, dvs<br />
H = {x + iy ∈ C|y > 0},<br />
och där införa ett avstånds- samt areabegrepp med hjälp av bågelementet<br />
och areaelementet<br />
ds = |dz|<br />
y ,<br />
dµ = dxdy<br />
.<br />
y2 Den kortaste vägen mellan två punkter z1,z2 ∈ H får man genom att följa<br />
den geodet som passerar genom dessa. I vanliga fall (dvs då vi inte har någon<br />
krökning) så är geodeten den unika räta linje som går mellan punkterna. I det<br />
hyperboliska övre halvplanet ges geodeterna istället av halvcirklar samt räta<br />
linjer (vilka kan betraktas som generaliserade halvcirklar), vilka står vinkelrätt<br />
mot x-axeln. Se Figur S1 för en illustration av geodeterna γ1 och γ2 som<br />
Figure S1: Övre halvplanet<br />
H<br />
γ3<br />
y<br />
z4<br />
z3<br />
γ1<br />
γ2<br />
z2<br />
z1<br />
(a) Geodeter och en horocykel<br />
x<br />
S<br />
F1 F4 F7<br />
E<br />
e2<br />
e3 e ′ 3<br />
F6<br />
F3<br />
F5<br />
F2<br />
(b) Fundamentalområde<br />
förbinder z1 med z2 respektive z3 med z4. I figuren ger vi även ett exempel på<br />
161
en så kallad horocykel, γ3.<br />
En konsekvens av detta sätt att mäta på i det övre halvplanet är t.ex. att man<br />
inte kan ta sig ända ner till den reella linjen (dvs avståndet från varje punkt i<br />
H till reella linjen är oändligt).<br />
Ett något mer fysikaliskt sätt att tänka sig detta hyperboliska rummet på är<br />
följande (fritt efter Poincaré [82]):<br />
"Tänk dig att du lever i ett sfäriskt universum begränsad av ett “skal”. Antag att<br />
temperaturen i detta universum är proportionellt mot avståndet till skalet, dvs<br />
det är varmast i mitten och på skalet råder den absoluta nollpunkten. Föreställ<br />
dig nu att du rör dig med en hastighet proportionell mot temperaturen (detta<br />
är vad man fysikaliskt förväntar sig av på molekylär/atomär nivå). Dvs, ju<br />
närmare skalet man kommer, desto kallare blir det, desto saktare färdas man.<br />
Det är då ganska enkelt att inse att om man bestämmer sig för att försöka åka till<br />
“universums ände” (skalet) så kommer man aldrig fram hur länge man än åker<br />
(inom ändlig tid). Matematiskt sett kan man beräkna att r(t) = R(1 − e −ct ),<br />
där r(t) är avståndet från centrum vid tiden t, R är radien på skalet och c är en<br />
positiv konstant."<br />
En isometri i ett rum (där vi har ett avståndsbegrepp) är en avbildning som<br />
bevarar avstånd och areor. I vanliga “okrökta” fallet är translationer, rotationer<br />
och speglingar exempel på isometrier. Spegling är ett exempel på en<br />
orienteringsreverserande isometri, medan translation och rotation är orienteringsbevarande.<br />
I det övre hyperboliska övre halvplanet så kan varje orienteringsbevarande<br />
isometri skrivas som en Möbiusavbildning:<br />
T : z ↦→<br />
az + b<br />
, där a,b,c,d ∈ R, ad − bc = 1.<br />
cz + d<br />
En sådan avbildning associeras sedan till ett par av matriser:<br />
<br />
±<br />
a<br />
c<br />
b<br />
d<br />
,<br />
och gruppen av alla sådana isometrier skriver vi <strong>of</strong>tast som PSL(2,R) =gruppen<br />
av alla matriser <br />
a b<br />
c d , med a,b,c,d ∈ R, ad − bc = 1, och där vi identifierar<br />
matriserna <br />
a b −a −b<br />
c d och −c −d .<br />
Man vet nu att alla hyperboliska ytor kan beskrivas med hjälp av diskreta<br />
undergrupper till PSL(2,R), dvs vi kan skriva vår yta S som S = Γ\H , där<br />
Γ är en Fuchsisk grupp (en diskret grupp av Möbiusavbildningar). De ytor, S ,<br />
vi är intresserade av har dels “horn” (punkter utdragna till oändligheten, och<br />
vi tillåter dessutom att de har “hörn”. I den motsvarande gruppen, Γ, visar<br />
sig hornen som fixpunkter till paraboliska avbildningar, dvs de svarar mot<br />
matriser med absolutbeloppet av spåret = 2 (kom ihåg att spåret av en matris<br />
162
a b<br />
c d definieras som a + d). Hörnen är å andra sidan fixpunkter till elliptiska<br />
avbildningar (|spåret| < 2). Man brukar därför även säga att punkterna är<br />
paraboliska respektive elliptiska. (De paraboliska fixpunkterna kallas också<br />
spetsar). I PSL(2,R) finns förutom elliptiska och paraboliska avbildningar<br />
(som geometriskt svarar mot rotationer och translationer) även hyperboliska<br />
(|spåret| > 2). Då de andra typerna har unika fixpunkter har hyperboliska<br />
avbildningar i regel två fixpunkter i R ∪ {∞} (och de beskriver geometriskt en<br />
förflyttning (skalning) längs den geodet som förbinder dessa).<br />
För att illustrera ytan S = Γ\H brukar man ta hjälp av ett fundamentalområde,<br />
vilket i vårt fall, kan tas som ett sammanhängande område F ⊂ H vilket<br />
har två egenskaper: för det första får inga punkter inuti F avbildas till varandra<br />
med avbildningar i Γ, och för det andra så ska Γ-bilderna av F tesselera H<br />
(dvs ∪γ∈Γγ(F ) = H). Ett exempel på fundamentalområde är standardfundamentalområdet<br />
för den modulära gruppen, PSL(2,Z) (de matriser i PSL(2,R)<br />
som endast innehåller heltal) F1 = {z = x + iy ∈ H||z| ≥ 1, |x| ≤ 1<br />
2 }.<br />
I Figur S1(b) kan vi se F1 tillsammans med 6 stycken “kopior”. Observera<br />
att alla bilder, F j, har samma hyperboliska area. (Just den här samlingen<br />
av kopior “råkar” också vara ett fundamentalområde till en grupp, Γ7,12, som<br />
återkommer i kapitel 3). Om vi identifierar sidorna i F1 med avbildningarna<br />
S : z ↦→ z + 1 och E : z ↦→ −1<br />
z får vi (topologiskt sett) en sfär med en spets<br />
(i∞) samt två hörn (e2 samt e3 som identifieras med e ′ 3<br />
). Man kan visa att de<br />
sidparandeavbildningarna E och S genererar PSL(2,Z), och faktum är att i de<br />
fall vi betraktar går det alltid att välja fundamentalområdet så att de sidparande<br />
avbildningarna genererar gruppen.<br />
Sammanfattning av Kapitlen i Avhandlingen<br />
I kapitel ett studerar vi det problem som i övrehalvplansmodellen kan skrivas<br />
som:<br />
y 2 φ ′′<br />
xx(z) + φ ′′<br />
yy(z) + λφ(z) = 0, z = x + iy ∈ H , (1)<br />
φ (T z) = χ(T )φ(z),<br />
<br />
T ∈ Γ, z ∈ H , (2)<br />
|φ| 2 dµ = 1, (3)<br />
Γ\H<br />
där χ : Γ → S1 är en jämn Dirichlet karaktär (dvs χ(AB) = χ(A)χ(B) och<br />
χ(−1) = 1), och Γ är en Hecke-kongruensundergrupp till den modulära gruppen.<br />
För ett givet positivt heltal, N, definieras Hecke-kongruensgruppen,<br />
Γ0(N), på följande sätt:<br />
<br />
<br />
Γ0(N) =<br />
a<br />
c<br />
b<br />
d<br />
|a,b,c,d ∈ Z, ad − bc = 1, c ≡ 0 mod N .<br />
163
Vi beskriver kortfattat algoritmen. Givet ett egenvärde, λ = 1<br />
4 + R2 , så vet vi<br />
att φ kan skrivas som en Fourierserie:<br />
φ(x + iy) = ∑ c(n)<br />
n=0<br />
√ yKiR(2π|n|y)e 2πinx ,<br />
där KiR(y) är en K-Besselfunktion, och om vi approximerar funktionen φ med<br />
en trunkerad Fourierserie kan denna inverteras som en diskret Fouriertransform.<br />
Genom att använda (2) kan vi åstadkomma ett icke-trivialt, välkonditionerat<br />
linjärt ekvationssystem vilket vi kan lösa för att få fram Fourierkoefficienterna<br />
c(n).<br />
Om vi gör detta för ett godtyckligt värde på λ kommer den resulterade<br />
funktionen φ naturligtvis inte vara invariant under Γ. Men om λ är nära ett<br />
riktigt egenvärde så kommer de uträknade Fourierkoefficienterna att vara nära<br />
koefficienterna till en riktig egenfunktion. Med hjälp av vissa egenskaper som<br />
vi vet att en genuin egenfunktion har så bildar vi en “funktional” h(R) som har<br />
egenskapen att den är väldigt nära noll ifall R är nära ett korrekt egenvärde.<br />
Denna funktion används sedan för att lokalisera egenvärden till önskad noggrannhet.<br />
När vi väl har ett egenvärde och en tillhörande uppsättning Fourierkoefficienter<br />
kan vi med hjälp av en ytterligare algoritm (Fas 2) beräkna<br />
ytterligare Fourierkoefficienter på ett väldigt enkelt sätt.<br />
I kapitel 2 studerar vi ett liknande problem, där vi istället för (1) har ekvationen<br />
y 2 φ ′′<br />
xx(z) + φ ′′<br />
yy(z) − iymφ ′ x + λφ(z) = 0,z = x + iy ∈ H , (1’)<br />
där vikten, m, är ett reellt tal, och där villkoret (2) ersätts med<br />
φ(T z) = v(T ) jT (z;m)φ(z), (2’)<br />
där v : Γ → C är ett så kallat multiplikatorsystem, och<br />
jT (z;m) = exp(2πimArg(cz + d)),<br />
för T = <br />
a b<br />
c d och m ∈ R.<br />
Fysikaliskt kan ekvationen (1’) tolkas som att vi nu har en laddad (kvantmekanisk)<br />
partikel som rör sig i ett konstant magnetiskt fält på ytan Γ\H. Den<br />
magnetiska fältstyrkan är proportionell mot m, och multiplikatorsystemet kan<br />
användas för att beskriva flödet genom olika delar av ytan (“hornen”, “handtagen”<br />
etc.) Se t.ex. [2, 1, 11]. (För den som är insatt i fysiken så svarar (1’)<br />
mot vi väljer Landaugaugen, A = c m<br />
y dx för någon lämplig konstant.)<br />
Det visar sig att den metod som infördes i kapitel 1 fortfarande fungerar,<br />
med vissa smärre förändringar. Det (ur beräkningssynpunkt) svåraste problemet<br />
är att Fourierutvecklingen innehåller Whittaker-W- istället för K-Bessel<br />
funktioner. W-funktionen är svårare att beräkna, och vi var tvungna att utveckla<br />
164
en ny algoritm för denna. Algoritmen presenteras i kapitel 4.<br />
I kapitel 3 undersöker vi samma problem som i kapitel 1, men vi betraktar<br />
här även undergrupper Γ ⊆ PSL(2,Z) som inte är kongruensundergrupper.<br />
Den främsta skillnaden mellan kongruens- och icke-kongruensgrupper är<br />
att man inte har lika många “symmetrier” tillgängliga i icke-kongruensfallet.<br />
Detta innebär t.ex. att man inte har så mycket a priori kännedom om vare<br />
sig spektrat eller egenfunktionerna. Man kan därför ställa sig flera frågor<br />
som är mer eller mindre besvarade i kongruensfallet: finns det några “nya”<br />
<strong>Maass</strong>vågfunktioner? hur många finns det i så fall? hur fördelar sig Fourierkoefficienterna?<br />
Uppvisar de några symmmetrier?<br />
Vi bevisar existensen av nya vågfunktioner för grupper Γ som har vissa<br />
specifika egenskaper, vilka på ytorna Γ\H motsvarar olika former av spegelsymmetrier.<br />
(För att systematiskt verifiera dessa egenskaper måste man dock<br />
använda datorer i alla utom de enklaste fallen).<br />
165
Acknowledgements<br />
I would like to express my deep gratitude towards my supervisor, Pr<strong>of</strong>. Dennis<br />
A. Hejhal. He has been my constant guide in this exciting world <strong>of</strong> hyperbolic<br />
geometry, quantum chaos and analytic number theory. I wouldn’t have missed<br />
this for anything! I am also very thankful for all the work he has put in by<br />
pro<strong>of</strong>reading all my manuscripts for this thesis.<br />
I would also like to thank my assistant advisor, Dr. Andreas Strömbergsson<br />
for the many discussions, which have been truly invaluable. My fellow graduate<br />
student, Helen Avelin has also contributed to many <strong>of</strong> these discussions,<br />
and I would like to thank her too, especially in connection with the work in<br />
Chapter 4.<br />
The computational parts <strong>of</strong> my work would not have been possible without<br />
the care <strong>of</strong> the computer system that has been provided by all competent<br />
and friendly computer administrators here at the department and at NSC in<br />
Linköping.<br />
When widening the area <strong>of</strong> gratefulness, I would also like to thank all my<br />
co-workers at the department for being around and providing a nice atmosphere<br />
for me to work and drink c<strong>of</strong>fee in. I mention no one in particular,<br />
since that’s the only way I won’t forget anyone.<br />
Close by the department, I should also thank Möbius (the student organization)<br />
for providing me with a constant supply <strong>of</strong> cc-light for the last 12 years<br />
or so.<br />
Thanks to all my friends and acquaintances in Uppsala for providing nonmathematical<br />
reasons to stay here.<br />
While I am at it, I would also like to thank my parents and family for this<br />
(once in a lifetime) opportunity to exist.<br />
And, finally, I would like to thank ............... (insert your name here if you<br />
feel left out).<br />
167
References<br />
[1] M. Antoine, A. Comtet, and M. Knecht, Heat kernel expansion for<br />
fermionic billiards in an external magnetic field, J. Phys. A: Math. Gen.<br />
23 (1990), L35–L41.<br />
[2] M. Antoine, A. Comtet, and S. Ouvry, Scattering on a hyperbolic torus in<br />
a constant magnetic field, J. Phys. A: Math. Gen. 23 (1990), 3699–3710.<br />
[3] T. M. Apostol, Modular Functions and Dirichlet Series in Number Theory,<br />
Springer-Verlag, 1976.<br />
[4] T. Arakawa, Shimura correspondence for <strong>Maass</strong> wave forms and Selberg<br />
zeta functions, Proceedings <strong>of</strong> the conference "automorphic forms and representations<br />
<strong>of</strong> algebraic groups over local fields" (Hiroshi Saito and Tetusya<br />
Takahashi, eds.), RIMS Kyoto Univ., 2003, pp. 1–14.<br />
[5] A. O. L. Atkin and J. Lehner, Hecke operators on Γ0(M), Math. Ann. 185<br />
(1970), 134–160.<br />
[6] A. O. L. Atkin and W.-C. W. Li, Twists <strong>of</strong> newforms and pseudoeigenvalues<br />
<strong>of</strong> W-operators, Invent. Math. 48 (1978), no. 3, 221–243.<br />
[7] A. O. L. Atkin and H. P. F. Swinnerton-Dyer, Modular forms on noncongruence<br />
subgroups, Combinatorics (Proc. Sympos. Pure Math., Vol. XIX,<br />
Univ. California, Los Angeles, Calif., 1968), Amer. Math. Soc., Providence,<br />
R.I., 1971, pp. 1–25.<br />
[8] R. Aurich, F. Steiner, and H. Then, Numerical computation <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong><br />
and an application to cosmology, Proceedings <strong>of</strong> the "International<br />
School on Mathematical <strong>Aspects</strong> <strong>of</strong> Quantum Chaos II", Lecture Notes in<br />
Physics, Springer, 2004, to appear.<br />
[9] H. Avelin, On the Deformation <strong>of</strong> Cusp Forms, 2003, Filos<strong>of</strong>ie Licentiat<br />
avhandling.<br />
[10] , Working notes on an algorithm for the K-bessel function with<br />
complex order, 2004, Personal Communication.<br />
169
[11] J. E. Avron, M. Klein, and A. Pnueli, Hall Conductance and Adiabatic<br />
Charge Transport <strong>of</strong> Leaky Tori, Physical Review Letters 69 (1992), no. 1,<br />
128–131.<br />
[12] E. Balslev and A. Venkov, Spectral theory <strong>of</strong> Laplacians for Hecke groups<br />
with primitive character, Acta Math. 186 (2001), 155–217.<br />
[13] A. Biró, Cycle integrals <strong>of</strong> <strong>Maass</strong> forms <strong>of</strong> weight 0 and fourier coefficients<br />
<strong>of</strong> <strong>Maass</strong> forms <strong>of</strong> weight 1/2, Acta Arithmetica 94 (2000), no. 2,<br />
103–152.<br />
[14] E. Bogomolny et al., Arithmetical Chaos, Physics Reports 291 (1997), 219–<br />
324.<br />
[15] A. Booker, A. Strömbergsson, and A. Venkatesh, Effective Computations<br />
with <strong>Maass</strong> Forms, In preparation.<br />
[16] J. Borwein and D. Bailey, Mathematics by experiment, A K Peters Ltd.,<br />
Natick, MA, 2004, Plausible reasoning in the 21st century.<br />
[17] R. W. Bruggeman, Modular forms <strong>of</strong> varying weight. III, J. Reine Angew.<br />
Math. 371 (1986), 144–190.<br />
[18] , Families <strong>of</strong> automorphic forms, Birkhäuser, 1994.<br />
[19] D. Bump, The Rankin-Selberg method: a survey, Number Theory, Trace<br />
Formulas and Discrete Groups (K.E. Aubert et al, ed.), Academic Press, 1989,<br />
pp. 49–109.<br />
[20] , Automorphic Forms and Representations, Cambridge Studies in<br />
Advanced Mathematics, no. 55, Cambridge University Press, 1996.<br />
[21] D. Bump and J. H<strong>of</strong>fstein, On Shimura’s correspondence, Duke Math. J. 55<br />
(1987), no. 3, 661–691.<br />
[22] ˙I. N. Cangül and O. Bizim, Cycloidal normal subgroups <strong>of</strong> Hecke groups<br />
<strong>of</strong> finite index, Turkish J. Math. 23 (1999), no. 2, 345–354.<br />
[23] ˙I. N. Cangül and D. Singerman, Normal subgroups <strong>of</strong> Hecke groups and<br />
regular maps, Math. Proc. Cambridge Philos. Soc. 123 (1998), no. 1, 59–74.<br />
[24] Y. Chuman, Generators and Relations <strong>of</strong> Γ0(N), J. Math. Kyoto Univ.<br />
(1973), 381–390.<br />
[25] H. Cohn, Advanced Number Theory, Dover, 1980.<br />
170
[26] M. Conder and P. Dobcsányi, Normal Subgroups <strong>of</strong> Low Index in the Modular<br />
Group and other Hecke Groups, Research Report Series 496, Dept. <strong>of</strong><br />
Math., Univ. <strong>of</strong> Auckland, 2003.<br />
[27] D. Davenport, Multiplicative Number Theory, 2 ed., Graduate Texts in<br />
Mathematics, no. 74, Springer-Verlag, 1980.<br />
[28] W. Duke, Hyperbolic distribution problems and half-integral weight<br />
<strong>Maass</strong> forms, Invent. Math. 92 (1988), 73–90.<br />
[29] A. Erdélyi, W. Magnus, F. Oberhettinger, and F. G. Tricomi, Higher Transcendental<br />
Functions. Vols. I, II, McGraw-Hill, 1953.<br />
[30] D.W. Farmer and S. Lemurell, Deformations <strong>of</strong> <strong>Maass</strong> forms,<br />
http://xxx.lanl.gov/abs/math.NT/0302214.<br />
[31] L. R. Ford, Automorphic Functions, 2nd ed., Chelsea Publishing, 1972.<br />
[32] W. Gautschi, <strong>Computational</strong> aspects <strong>of</strong> three-term recurrence relations,<br />
SIAM Review 9 (1967), no. 1, 24–82.<br />
[33] A. Gil, J. Segura, and N. M. Temme, Evaluation <strong>of</strong> the modified Bessel function<br />
<strong>of</strong> the third kind <strong>of</strong> imaginary orders, J. Comput. Phys. 175 (2002),<br />
no. 2, 398–411.<br />
[34] R. C. Gunning, Lectures on Modular Forms, Princeton University Press,<br />
1962.<br />
[35] M. C. Gutzwiller, Chaos in classical and quantum mechanics, Interdisciplinary<br />
Applied Mathematics, vol. 1, Springer-Verlag, New York, 1990.<br />
[36] E. Hecke, Matematische Werke, Vandhoeck & Ruprecht, Göttingen, 1970.<br />
[37] D. A. Hejhal, Some Dirichlet series with coefficients related to periods<br />
<strong>of</strong> automorphic eigenforms. I,II, Proc. Japan Acad. Ser. A, 58 (1982), pp.<br />
413–417; 59 (1983), pp. 335-338.<br />
[38] , The Selberg Trace Formula for PSL(2,R), Vol.1, Lecture Notes<br />
in Mathematics, vol. 548, Springer-Verlag, 1976.<br />
[39] , The Selberg Trace Formula for PSL(2,R), Vol.2, Lecture Notes<br />
in Mathematics, vol. 1001, Springer-Verlag, 1983.<br />
[40] , A continuity method for spectral theory on Fuchsian groups,<br />
Modular forms (R.A. Rankin, ed.), Ellis-Horwood, Chichester, 1984, pp. 107–<br />
140.<br />
171
[41] , Regular b-groups, degenerating Riemann surfaces, and spectral<br />
theory, Mem. Amer. Math. Soc. 88 (1990), no. 437, iv+138.<br />
[42] , Eigenvalues <strong>of</strong> the Laplacian for Hecke triangle groups, Mem.<br />
Amer. Math. Soc. 97 (1992), no. 469, vi+165.<br />
[43] , On eigenfunctions <strong>of</strong> the Laplacian for Hecke triangle groups,<br />
Emerging applications <strong>of</strong> number theory (D. Hejhal, J. Friedman, et al., eds.),<br />
IMA Vol. Math. Appl., vol. 109, Springer, New York, 1999, pp. 291–315.<br />
[44] , On the Calculation <strong>of</strong> <strong>Maass</strong> Cusp Forms, Proceedings <strong>of</strong> the<br />
"International School on Mathematical <strong>Aspects</strong> <strong>of</strong> Quantum Chaos II", Lecture<br />
Notes in Physics, Springer, 2004, to appear.<br />
[45] D. A. Hejhal and S. Arno, On Fourier coefficients <strong>of</strong> <strong>Maass</strong> <strong>waveforms</strong> for<br />
PSL(2,Z), Math. Comp. 61 (1993), no. 203, 245–267, S11–S16.<br />
[46] D. A. Hejhal and A. Strömbergsson, On quantum chaos and <strong>Maass</strong> <strong>waveforms</strong><br />
<strong>of</strong> CM-type, Foundations <strong>of</strong> Physics 31 (2001), 519–533.<br />
[47] T. Hsu, Identifying congruence subgroups <strong>of</strong> the modular group, Proc.<br />
Amer. Math. Soc. 124 (1996), no. 5, 1351–1359.<br />
[48] M. N. Huxley, Scattering matrices for congruence subgroups, Modular<br />
forms (R. Rankin, ed.), Ellis Horwood, Chichester, 1984, pp. 141–156.<br />
[49] F. M. Ives, Permutation enumeration: four new permutation algorithms,<br />
Commun. ACM 19 (1976), no. 2, 68–72.<br />
[50] H. Iwaniec, Introduction to the Spectral Theory <strong>of</strong> Automorphic Forms,<br />
Revista Matemaática Iberoamericana, 1995.<br />
[51] , Topics in Classical Automorphic Forms, American Mathematical<br />
Society, 1997.<br />
[52] S. Katok, Fuchsian Groups, The University <strong>of</strong> Chicago Press, 1992.<br />
[53] S. Katok and P. Sarnak, Heegner points, cycles and <strong>Maass</strong> forms, Israel<br />
Journal <strong>of</strong> Mathematics 84 (1993), 193–227.<br />
[54] K. Khuri-Makdisi, On the Fourier coefficients <strong>of</strong> nonholomorphic Hilbert<br />
modular forms <strong>of</strong> half-integral weight, Duke Math. J. 64 (1996), 399–452.<br />
[55] M.I. Knopp, Modular Functions in Analytic Number Theory, Markham<br />
Publishing Company, 1970.<br />
[56] W. Kohnen, Modular forms <strong>of</strong> half-integral weight on Γ0(4), Math. Ann.<br />
248 (1980), no. 3, 249–266.<br />
172
[57] , Newforms <strong>of</strong> half-integral weight, J. Reine Angew. Math. 333<br />
(1982), 32–72.<br />
[58] H. Kojima, Shimura correspondence <strong>of</strong> <strong>Maass</strong> wave forms with half integral<br />
weight, Acta Arithmetica 69 (1995), no. 4, 367–385.<br />
[59] , On the fourier coefficients <strong>of</strong> <strong>Maass</strong> wave forms <strong>of</strong> half integral<br />
weight over an imaginary quadratic field, J. reine angew. Math. 526 (2000),<br />
155–179.<br />
[60] S.L. Krushkal, B.N. Apanasov, and N.A. Gusevskii, Kleinian Groups and<br />
Uniformization in Examples and Problems, Translations <strong>of</strong> Mathematical<br />
Monographs, AMS, 1986.<br />
[61] S. Lang, Algebraic Number Theory, second ed., Graduate Texts in Mathematics,<br />
vol. 110, Springer-Verlag, New York, 1994.<br />
[62] H. <strong>Maass</strong>, Über eine neue Art von nichtanalytischen automorphen Funktionen<br />
und die Bestimmung Dirichletscher Reihen durch Funktionalgleichungen,<br />
Math. Annalen 121 (1949), 141–183.<br />
[63] , Lectures on Modular Functions <strong>of</strong> One Complex Variable, second<br />
ed., Tata Institute <strong>of</strong> Fundamental Research Lectures on Mathematics and<br />
Physics, vol. 29, Tata Institute <strong>of</strong> Fundamental Research, Bombay, 1983.<br />
[64] W. Magnus and R. Oberhettinger, F. Soni, Formulas and Theorems for<br />
the Special Functions <strong>of</strong> Mathematical Physics, Third enlarged edition,<br />
Springer-Verlag, 1966.<br />
[65] B. Maskit, Kleinian Groups, Springer-Verlag, 1988.<br />
[66] M. H. Millington, On cycloidal subgroups <strong>of</strong> the modular group, Proc.<br />
London Math. Soc. (3) 19 (1969), 164–176.<br />
[67] , Subgroups <strong>of</strong> the classical modular group, J. London Math. Soc.<br />
(2) 1 (1969), 351–357.<br />
[68] T. Miyake, On automorphic forms on GL2 and Hecke operators, Ann. <strong>of</strong><br />
Math. (2) 94 (1971), 174–189.<br />
[69] , Modular Forms, Springer-Verlag, 1997.<br />
[70] T. Mühlenbruch, Systems <strong>of</strong> Automorphic Forms and Period Functions,<br />
Ph.D. thesis, Mathematisch Instituut, Universitet Utrecht, 2003.<br />
[71] K. E. Muller, Computing the confluent hypergeometric function,<br />
M(a,b,x), Numer. Math. 90 (2001), no. 1, 179–196.<br />
173
[72] S. Niwa, Modular forms <strong>of</strong> half integral weight and the integral <strong>of</strong> certain<br />
theta-functions, Nagoya Math. J. 56 (1975), 147–161.<br />
[73] F. W. J. Olver, Error analysis <strong>of</strong> Miller’s recurrence algorithm, Math.<br />
Comp. 18 (1964), 65–74.<br />
[74] , Error bounds for linear recurrence relations, Math. Comp. 50<br />
(1988), no. 182, 481–499.<br />
[75] A. Orihara, On the Eisenstein series for the principal congruence subgroups,<br />
Nagoya Math. J. 34 (1969), 129–142.<br />
[76] A. L. Orive, Some Presentations for Γ0(N), Conformal Geometry and Dynamics<br />
6 (2002), 33–60.<br />
[77] H. Petersson, Zur analytischen Theorie der Grenzkreisgruppen. I. Grenzkreisgruppen<br />
und Riemannsche Flächen; Theorie der Faktoren- und<br />
Multiplikatorsysteme komplexer Dimension, Math. Ann. 115 (1937), 23–<br />
67.<br />
[78] , Über einen einfachen Typus von Untergruppen der Modulgruppe,<br />
Arch. Math. 4 (1953), 308–315.<br />
[79] , Über die Konstruktion zykloider Kongruenzgruppen in der rationalen<br />
Modulgruppe, J. Reine Angew. Math. 250 (1971), 182–212.<br />
[80] R. S. Phillips and P. Sarnak, On cusp forms for co-finite subgroups <strong>of</strong><br />
PSL(2,R), Invent. Math. 80 (1985), 339–364.<br />
[81] , The Weyl Theorem and the Deformation <strong>of</strong> Discrete Groups,<br />
Comm. on Pure and Appl. Math. 38 (1985), 853–866.<br />
[82] H. Poincaré, Science and hypothesis, Dover Publications Inc., New York,<br />
1952.<br />
[83] H. Rademacher, Über die Erzeugenden von Kongruenzuntergruppe der<br />
Modulgruppe, Abhandlungen Hamburg 7 (1929), 134–148.<br />
[84] R. A. Rankin, Modular Forms and Functions, Cambridge University Press,<br />
1976.<br />
[85] J. G. Ratcliffe, Foundations <strong>of</strong> Hyperbolic Manifolds, Springer-Verlag,<br />
1994.<br />
[86] M. S. Risager, Asymptotic densities <strong>of</strong> <strong>Maass</strong> newforms, J. Number Theory<br />
109 (2004), no. 1, 96–119.<br />
174
[87] P. Sarnak, Additive number theory and <strong>Maass</strong> forms, Number theory<br />
(New York, 1982), Lecture Notes in Math., vol. 1052, Springer, Berlin, 1984,<br />
pp. 286–309.<br />
[88] A. Selberg, Collected papers, vol. 1, Springer-Verlag, 1989.<br />
[89] G. Shimura, Introduction to the Arithmetic Theory <strong>of</strong> Automorphic Forms,<br />
Princeton Univ Press, 1971.<br />
[90] , On modular forms <strong>of</strong> half integral weight, Annals <strong>of</strong> Math. 97<br />
(1973), 440–481.<br />
[91] , On the Fourier coefficients <strong>of</strong> Hilbert modular forms <strong>of</strong> halfintegral<br />
weight, Duke Math. J. 71 (1993), 501–557.<br />
[92] T. Shintani, On construction <strong>of</strong> holomorphic cusp forms <strong>of</strong> half integral<br />
weight, Nagoya Math. J. 58 (1975), 83–126.<br />
[93] A. Strömbergsson, The Selberg Trace Formula for SL(2,R) and arbitrary<br />
real weight, unpublished manuscript.<br />
[94] A. Strömbergsson, Studies in the analytical and spectral theory <strong>of</strong> automorphic<br />
forms, Ph.D. thesis, Uppsala University, Dept. <strong>of</strong> Math., 2001.<br />
[95] A. Strömbergsson and B. Selander, Sextic coverings <strong>of</strong> genus two which are<br />
branched at three points, Preprint, 2002.<br />
[96] N. M. Temme, The numerical computation <strong>of</strong> the confluent hypergeometric<br />
function U(a, b, z), Numer. Math. 41 (1983), no. 1, 63–82.<br />
[97] A. Terras, Harmonic Analysis on Symmetric Spaces and Applications,<br />
vol. I, Springer-Verlag, New York, 1985.<br />
[98] H. Then, <strong>Maass</strong> cusp forms for large eigenvalues, Math. Comp. 74 (2005),<br />
no. 249, 363–381.<br />
[99] F. G. Tricomi, Fonctions hypergéométriques confluentes, Gauthier-Villars,<br />
1960.<br />
[100] A. B. Venkov, A remark on the discrete spectrum <strong>of</strong> the automorphic<br />
Laplacian for a generalized cycloidal subgroup <strong>of</strong> a general Fuchsian<br />
group, J. Soviet Math. 52 (1990), no. 3, 3016–3021.<br />
[101] J. Von Neumann and E. Wigner, Über das Verhalten von Eigenwerten bei<br />
adiabatischen Processen, Phys. Zeit. 30 (1929), 467–470.<br />
[102] J. Wimp, On the Computation <strong>of</strong> Tricomi’s Ψ Function, Computing 13<br />
(1974), 195–203.<br />
175
[103] K. Wohlfahrt, Über Operatoren Heckescher Art bei Modulformen reeller<br />
Dimension, Math. Nachr. 16 (1957), 233–256.<br />
[104] , An extension <strong>of</strong> F. Klein’s level concept, Illinois J. Math. 8 (1964),<br />
529–535.<br />
[105] P. G. Zograf, The spectrum <strong>of</strong> automorphic Laplacians in spaces <strong>of</strong><br />
parabolic functions, Dokl. Akad. Nauk SSSR 269 (1983), no. 4, 802–805.<br />
[106] , Small eigenvalues <strong>of</strong> automorphic Laplacians in spaces <strong>of</strong> cusp<br />
forms, Zap. Nauchn. Sem. Leningrad. Otdel. Mat. Inst. Steklov. (LOMI) 134<br />
(1984), 157–168, Automorphic functions and number theory, II.<br />
176