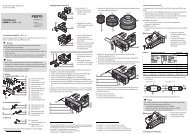
Standard grippers HGP/HGD/HGR/HGW Micro grippers ... - Festo
Standard grippers HGP/HGD/HGR/HGW Micro grippers ... - Festo
Standard grippers HGP/HGD/HGR/HGW Micro grippers ... - Festo

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
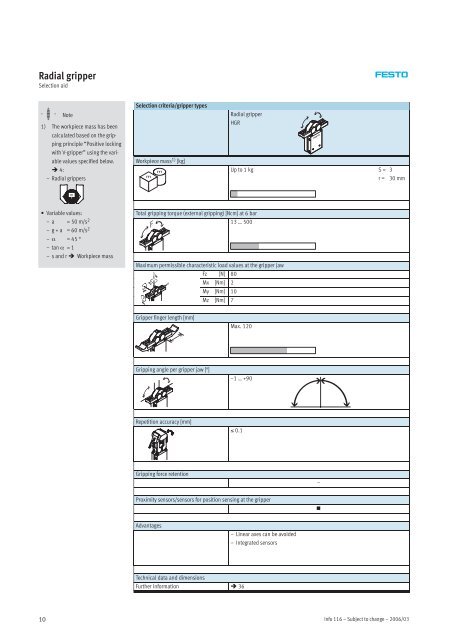
Radial gripper<br />
Selection aid<br />
-H- Note<br />
1) The workpiece mass has been<br />
calculated based on the gripping<br />
principle “Positive locking<br />
with V-gripper” using the variable<br />
values specified below.<br />
4:<br />
–Radial<strong>grippers</strong><br />
10<br />
Variable values:<br />
–a =50m/s 2<br />
–g+a =60m/s 2<br />
– α =45°<br />
–tanα =1<br />
–sandr Workpiece mass<br />
Selection criteria/gripper types<br />
Workpiece mass 1) [kg]<br />
Radial gripper<br />
<strong>HGR</strong><br />
Total gripping torque (external gripping) [Ncm] at 6 bar<br />
13 … 500<br />
Maximum permissible characteristic load values at the gripper jaw<br />
Fz [N] 80<br />
Mx [Nm] 2<br />
My [Nm] 10<br />
Mz [Nm] 7<br />
Gripperfingerlength[mm]<br />
Gripping angle per gripper jaw [°]<br />
Repetition accuracy [mm]<br />
Gripping force retention<br />
Up to 1 kg S= 3<br />
r= 30mm<br />
Max. 120<br />
–1 … +90<br />
≤ 0.1<br />
Proximity sensors/sensors for position sensing at the gripper<br />
Advantages<br />
Technical data and dimensions<br />
Further information 36<br />
– Linear axes can be avoided<br />
– Integrated sensors<br />
–<br />
<br />
Info 116 – Subject to change – 2006/03