Order No. 4451 Fuselage kit Order No. 4451.K ... - Graupner
Order No. 4451 Fuselage kit Order No. 4451.K ... - Graupner
Order No. 4451 Fuselage kit Order No. 4451.K ... - Graupner

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
UNI-STAR<br />
60<br />
<strong>Order</strong> <strong>No</strong>. <strong>4451</strong> <strong>Fuselage</strong> <strong>kit</strong><br />
<strong>Order</strong> <strong>No</strong>. <strong>4451</strong>.K Helicopter <strong>kit</strong>, including fuselage <strong>kit</strong> and<br />
preassembled UNI- EXPERT-Mechanics<br />
with<br />
installed Motor<br />
<strong>Order</strong> <strong>No</strong>. <strong>4451</strong>.KL Helicopter <strong>kit</strong>, including fuselage <strong>kit</strong><br />
and unassembled UNI-EXPERT-Mechanics,<br />
Motor not included<br />
<strong>Order</strong> <strong>No</strong>. 4457 Electric Helicopter <strong>kit</strong> „TRAINER UNI-E“,<br />
including fuselage <strong>kit</strong> and preassembled UNI-<br />
EXPERT-Mechanics (electric version),<br />
Motor not included<br />
WarnIng!<br />
The RC helicopter which can be built based from this <strong>kit</strong> is by no means a toy! It is a<br />
complex flying machine which is capable of causing serious personal injury and damage<br />
to property if handled and operated incompetently.<br />
You alone are responsible for completing the model correctly and operating it with due<br />
regard for safety. Please be sure to read and observe the enclosed sheets SHW3 and<br />
SHW7 which include full safety information. They should be considered as an integral<br />
part of these instructions.<br />
GRAUPNER GmbH & Co. KG D-73230 KIRCHHEIM/TECK GERMANY<br />
Änderungen vorbehalten 4/05
UNI-STAR 60<br />
Foreword<br />
The UNI-STAR 60 fuselage <strong>kit</strong> complements the UNI-EXPERT- Mechanics or Uni-Mechanics<br />
2000 to form an elegant helicopter of open construction which is as suitable for beginner’s<br />
training as it is for unlimited aerobatics and the extreme style of flying known as "3-D".<br />
The lightweight vacuum-moulded fuselage fairing for the mechanics is mounted on rubber<br />
grommets for optimum vibration suppression, and it can be fitted and removed quickly and<br />
simply. This makes for excellent accessibility to the radio control components and mechanics<br />
for checking and maintenance. The black eloxided tail boom is amply braced by means of two<br />
long CFRP struts, and can be replaced extremely quickly and straightforwardly if damaged. The<br />
boom’s length has been chosen with two factors in mind: to ensure that the beginner can learn<br />
the basic flying skills with short, low-cost wooden blades, and to allow the expert to indulge in<br />
unlimited "3-D" aerobatics by fitting longer symmetrical-section GRP or CFRP rotor blades.<br />
With its long skid tubes the landing gear provides a stable base for the helicopter, and the<br />
system is designed in such a way that the main rotor shaft is vertical when the model is on the<br />
ground. This makes it much easier to take-off and land the model accurately. Sets of wider<br />
reinforced skid bars are available for initial training under <strong>Order</strong> <strong>No</strong>. 4447.106 and <strong>4451</strong>.14.<br />
An electric version of the UNI-STAR 60, named „TRAINER UNI-E“, is available under <strong>Order</strong> <strong>No</strong>.<br />
4457 as a complete helicopter <strong>kit</strong>. While the mechanics is different the body <strong>kit</strong> is identical.<br />
Therefore this manual covers the body of the „TRAINER UNI-E“ as well; differences to the<br />
normal Version are mentioned in the text.<br />
Specification<br />
Length excl. rotor approx. 1414 mm<br />
Width excl. rotor approx. 240 mm<br />
Height approx.<br />
430 mm<br />
Rotor Ø range 1410...1550 mm<br />
All-up weight min. approx. 4000 g<br />
2
UNI-STAR 60<br />
Warning notes<br />
• The contents of this <strong>kit</strong> can be assembled to produce a working model helicopter, but<br />
the model is by no means a harmless plaything. If assembled incorrectly or handled<br />
incompetently or carelessly it can cause serious injury to persons and damage to<br />
property.<br />
• When the model helicopter’s engine is running, the two rotors are spinning at high<br />
speed and contain an enormous quantity of rotational energy. Anything and<br />
everything that gets into the rotational plane of the rotors is either damaged or destroyed<br />
- and that includes parts of your body. Please take extreme care at all times<br />
with this machine.<br />
• If any object obstructs the rotational plane of the revolving rotors, severe damage will<br />
probably be caused to the rotor blades as well as the object. Broken parts may fly off<br />
and result in enormous imbalance; the whole helicopter then falls into sympathetic<br />
vibration, you lose control and have no way of predicting what the model will do next.<br />
• You may also lose control if a problem arises in the radio control system, perhaps as<br />
a result of outside interference, component failure or flat or faulty batteries, but in any<br />
case the result is the same: the model helicopter’s response is entirely unpredictable.<br />
Without prior warning it may move off in any direction.<br />
• Helicopters have many parts which are naturally subject to wear, including gearbox<br />
components, motor, ball-links etc., and as a result it is absolutely essential to check<br />
and maintain the model regularly. It is standard practice with full-size aircraft to give<br />
the machine a thorough “pre-flight check” before every flight, and this is equally important<br />
with your model helicopter. Constant checking gives you the opportunity to<br />
detect and correct any faults which may develop before they are serious enough to<br />
cause a crash.<br />
• The <strong>kit</strong> also includes two additional information sheets - SHW 3 and SHW 7 - which include<br />
safety notes and warnings. Please be sure to read them and keep to our recommendations.<br />
They are an essential part of these instructions.<br />
• This helicopter is designed to be constructed and operated by adults, although young<br />
people of 16 years or more may do so under the instruction and supervision of competent<br />
adults.<br />
• The model features sharp points and edges which may cause injury.<br />
• Flying model aircraft is subject to certain legal restrictions, and these must be observed<br />
at all times. For example, it is essential to take out third party insurance, you must<br />
obtain permission to use the flying site, and you may have to obtain a licence to use<br />
your radio control system (regulations vary from country to country).<br />
• It is important to transport your model helicopter (e.g. to the flying site) in such a way<br />
that there is no danger of damaging the machine. Particularly vulnerable areas are the<br />
rotor head linkages and the tail rotor generally.<br />
3
UNI-STAR 60<br />
• Controlling a model helicopter successfully is not easy; you will need persistence and<br />
determination to learn the skills, and good hand-eye co-ordination is a basic requirement.<br />
• Before you attempt to fly the model you should study the subject of helicopters in<br />
depth, so that you have a basic understanding of how the machines work. Read<br />
everything you can on the theory of helicopters, and spend as much time as you can<br />
watching other model helicopter pilots flying. Talk to chopper pilots, ask their advice,<br />
and enrol at a specialist model flying school if you need to. Many model shops will<br />
also be prepared to help you.<br />
• Please be sure to read right through these instructions before you start work on the<br />
model. It is important that you clearly understand each individual stage of assembly<br />
and the correct sequence of events before you begin building.<br />
• Don’t make modifications to the model’s construction by using parts other than those<br />
specifically recommended, unless you are certain of the quality and suitability of<br />
these other components for the task.<br />
• We have made every effort to point out to you the dangers inherent in operating this<br />
model helicopter. Since neither we, the manufacturer, nor the model shop that sold<br />
you the <strong>kit</strong> have any influence over the way you build and operate your model, we are<br />
obliged to disclaim any liability in connection with it.<br />
Liability exclusion / Compensation<br />
As manufacturers, we at GRAUPNER are not in a position to influence the way you build<br />
and set up the model, nor how you install, operate and maintain the radio control system<br />
components. For this reason we are obliged to deny all liability for loss, damage or costs<br />
which are incurred due to the incompetent or incorrect use and operation of our products,<br />
or which are connected with such operation in any way.<br />
Unless otherwise prescribed by binding law, the obligation of the GRAUPNER company<br />
to pay compensation, regardless of the legal argument employed, is limited to the invoice<br />
value of that quantity of GRAUPNER products which was immediately and directly<br />
involved in the event which caused the damage. This does not apply if GRAUPNER is<br />
found to be subject to unlimited liability according to binding legal regulation on account<br />
of deliberate or gross negligence.<br />
4
UNI-STAR 60<br />
Contents<br />
• Foreword ......................................... P.2<br />
• Warnings ......................................... P.3<br />
• Accessories, additional parts required .................... P.6<br />
• 1. Assembly ....................................... P.7<br />
• Preparing the tail boom struts ......................... P.7<br />
• Preparing the mechanics to accept the tail boom ........... P.7<br />
• Preparing the tail boom ............................. P.7<br />
• Completing the tail boom ............................ P.8<br />
• Checking and adjustig the tail rotor drive shaft ............ P.8<br />
• Attaching the tail boom to the mechanics ................ P.9<br />
• Installing the skids ................................. P.10<br />
• Tail rotor linkage .................................. P.10<br />
• Mounting the Body................................. P.11<br />
• 2. Setting up ....................................... P.12<br />
• 3. Pre-flight checks .................................. P.15<br />
• 4. Maintenance ..................................... P.15<br />
• 5. Fitting the starter adaptor ............................ P.15<br />
• 6. Adjustments during the first flight, blade tracking ........... P.16<br />
• Adjusting the motor ................................ P.17<br />
• 7. General safety measures ............................ P.18<br />
• 8. Basic helicopter terminology ......................... P.19<br />
The instructions<br />
We have invested considerable effort in producing these instructions to ensure that you are able<br />
to build and fly your new model helicopter safely and without problems. Whether you are a<br />
beginner or an expert, please be sure to follow these instructions, step by step, exactly as<br />
described in the text.<br />
• Some parts, like the mechanics set, are supplied largely factory-preassembled, but the<br />
system is not set up or adjusted ready to fly. It is entirely the modeller’s responsibility to<br />
check that all screws and other joints are tight and secure, and to carry out the essential<br />
adjustments thoroughly and conscientiously.<br />
• The process of completing the mechanics is carried out by referring to the illustrations and<br />
the explanatory texts which accompany them.<br />
• The joints marked with this symbol must be secured with thread-lock fluid, e.g.<br />
<strong>Order</strong> <strong>No</strong>. 952 or bearing adhesive, <strong>Order</strong> <strong>No</strong>. 951; be sure to remove all traces of grease<br />
before applying the fluid.<br />
• Parts list, replacement parts list and exploded drawings are included at the end of the<br />
manual.<br />
5
UNI-STAR 60<br />
Accessories<br />
(use the instructions in the manual of the mechanics if building the electric version „TRAINER UNI-E“)<br />
Suitable mechanics:<br />
<strong>Order</strong> <strong>No</strong>. 4448.LN UNI-MECH. 2000 with OS MAX 91 motor Red. ratio 7.7 : 1<br />
<strong>Order</strong> <strong>No</strong>. 4448.LN UNI-MECH. 2000 with OS MAX 61 motor Red. ratio 9 : 1<br />
<strong>Order</strong> <strong>No</strong>. 4449.RXN, 4450.L UNI-Expert mech. with OS MAX 61 Red. ratio 9 : 1<br />
Recommended main rotor blades:<br />
<strong>Order</strong> <strong>No</strong>. 1246B GRP, reflex 688 mm long Rotor Ø 1551 mm (Starlet: 1533 mm)<br />
<strong>Order</strong> <strong>No</strong>. 1266 CFRP, symm. 686 mm long Rotor Ø 1547 mm (Starlet: 1529 mm)<br />
Adhesives<br />
UHU plus schnellfest, <strong>Order</strong> <strong>No</strong>. 962, fast-setting<br />
UHU plus endfest 300, <strong>Order</strong> <strong>No</strong>. 950, slow-setting, for gluing GRP to wood<br />
UHU Blitz, thin cyano-acrylate, <strong>Order</strong> <strong>No</strong>. 5803<br />
Thick cyano-acrylate, <strong>Order</strong> <strong>No</strong>. 1101, for tacking parts together<br />
Filler agent, e.g. <strong>Order</strong> <strong>No</strong>. 963, for thickening resin<br />
Tools required:<br />
Minimum set: assortment of files (round, half-round, flat), set of twist drills, light tin-snips,<br />
fretsaw, various screwdrivers, allen keys and general-purpose pliers. Coarse abrasive paper,<br />
e.g. 100-grit, <strong>Order</strong> <strong>No</strong>. 1068.1, for roughening joint surfaces and for sanding the GRP<br />
mouldings.<br />
Radio control system (see Mechanics manual and main <strong>Graupner</strong> catalogue)<br />
The model requires a radio control system equipped with special helicopter options, or a microcomputer<br />
radio control system such as the mc-12, mc-14, mc-15, mc-16/20, mc-22, mx-22 or<br />
mc-24.<br />
Servos (high-quality servos must be used), e.g.<br />
C 4421, <strong>Order</strong> <strong>No</strong>. 3892<br />
Gyro:<br />
G490T SRVS gyro, <strong>Order</strong> <strong>No</strong>. 5137, with NES-8700G super-servo, <strong>Order</strong> <strong>No</strong>. 5156, or<br />
PIEZO 550 gyro system, <strong>Order</strong> <strong>No</strong>. 5147.<br />
Electronic speed governor:<br />
mc-HELI-CONTROL, <strong>Order</strong> <strong>No</strong>. 3286<br />
Receiver power supply:<br />
For safety reasons it is essential to use a pack of at least 2000 mAh capacity. We also<br />
recommend a voltage monitor module, <strong>Order</strong> <strong>No</strong>. 3138, which allows you to monitor the battery<br />
voltage constantly.<br />
Switch harness:<br />
<strong>Order</strong> <strong>No</strong>. 3050; suitable receiver battery: <strong>Order</strong> <strong>No</strong>. 2568.<br />
6
UNI-STAR 60<br />
1. Assembly<br />
The following instructions describe how to assemble the tail boom from its component parts.<br />
Although the parts are supplied largely factory-assembled, you may need to know this<br />
information if repairs become necessary. Some components in this set are supplied factoryassembled.<br />
Nevertheless, it is up to the builder to check that the assembly work has been<br />
carried out correctly and that all joints are tight. Final adjustment is also left up to the builder.<br />
1.1 Preparing the tail boom struts<br />
Glue the strut sockets 4447.8A into both ends of the two CFRP struts 1292.108 using slowsetting<br />
epoxy, e.g. UHU-plus endfest 300, <strong>Order</strong> <strong>No</strong>. 950. Check that the sockets are exactly<br />
parallel to each other, then leave the epoxy to set hard.<br />
1.2 Preparing the mechanics to accept the tail boom<br />
Screw the mounting flange 1292.5 to the bearing holder 4448.14 on the mechanics using two<br />
M3 x 16 socket-head cap screws. At the same time fit the two M3 x 30 strut attachment screws<br />
to the mechanics side frames, together with the aluminium mounting bolts <strong>4451</strong>.12. To do this<br />
you will have to unscrew the top rotor shaft bearing temporarily and slide it down; the M3 x 30<br />
screws can then be fitted from the inside and screwed in to the point where their heads<br />
disappear almost completely into the side frames. Install the top rotor shaft bearing again.<br />
1.3 Tail boom<br />
The front end of the tail boom is curved, and the effect of this is that the tail boom rises towards<br />
the tail. This feature increases tail rotor ground clearance, and also ensures that the tail rotor<br />
drive shaft runs in a broad, smooth curve, and therefore has no tendency to oscillate.<br />
1.4 Preparing the tail boom<br />
Push the two tail rotor drive shaft supports 1292.10A into the tail boom <strong>4451</strong>.109 using a length<br />
of beech dowel or similar. The front support should be located 200 mm from the front end of the<br />
boom, and the rear support 300 mm from the tail end; in both cases the spherical cavities<br />
should face forward. Working from the front end press the guide ring <strong>4451</strong>.7 into the tail boom to<br />
a depth of exactly 27 mm, with the conical opening facing the rear; when the parts are<br />
assembled this ring guides the retaining sleeve accurately onto the coupling yoke.<br />
The front shaft coupling can now be prepared: when completed the coupling should<br />
automatically engage correctly inside the tail boom, without requiring you to align it or use any<br />
tool. This in turn means that the brass coupling sleeve 4618.58 needs to be an easy sliding fit<br />
over the coupling yoke 4618.57. If necessary remove any rough edges from the yoke and<br />
7
UNI-STAR 60<br />
reduce it slightly with fine abrasive paper. Push the tail rotor shaft <strong>Order</strong> <strong>No</strong>. <strong>4451</strong>.19 into the<br />
coupling sleeve completely, so that the pre-formed end is located inside the sleeve. <strong>No</strong>w fit a<br />
grubscrew in the collet 56.0 and slide it onto the tail rotor shaft after the sleeve. Push the tail<br />
rotor shaft into the coupling yoke as far as it will go, then slide the sleeve over the yoke in the<br />
same way. Position the collet about 1 mm from the sleeve and tighten the grubscrew onto the<br />
shaft.<br />
1.5 Completing the tail boom<br />
Fit the tail rotor flange 1292.7 on the rear end of the tail boom, and fit two strut supports 1292.6<br />
and the tail rotor linkage support <strong>4451</strong>.6 on the boom from the front as shown in the drawing.<br />
<strong>No</strong>te that the clamp clearance gap should be at the top of the strut supports. The hole for the tail<br />
rotor pushrod should be on the left-hand side of the rear support and the right-hand side of the<br />
front support; alternatively remove the front bored lug with a fretsaw. Attach the silencer holder<br />
<strong>4451</strong>.4 to the front strut support as shown below. <strong>No</strong>te: the front support 1296.6 and the silencer<br />
holder are not required if you are making the electric version "TRAINER UNI-E".<br />
1.6 Checking and adjustig the tail rotor drive shaft<br />
Withdraw the tail rotor drive shaft from the mechanics, oil it lightly and slip it through the shaft<br />
supports in the tail boom, rotating it all the while, until the rear end projects out of the tail boom<br />
far enough to allow you to insert it in the tail rotor coupling. Push the shaft in as far as it will go,<br />
then pull it back by 1 mm and temporarily tighten the grubscrews in the coupling to hold it in this<br />
position. <strong>No</strong>te: for normal operations the tail rotor shaft must have this 1 mm clearance in the<br />
front coupling yoke, and this is obtained later by pushing the shaft into the rear coupling as far<br />
as it will go. The tail boom can now be inserted temporarily in the mounting flange 1292.5; at the<br />
same time slide the tail boom completely onto the bearing holder 4448.14 and secure it with the<br />
flange. Push the tail rotor into the rear of the tail boom, rotating the tail rotor drive shaft to<br />
ensure that it engages correctly in the quick-release coupling at the main gearbox at the front. It<br />
should now be possible to slide the tail rotor into the tail boom to the point where it rests flush<br />
against the flange, without the drive shaft striking the end inside the quick-release coupling. If<br />
this is not the case you will have to shorten the tail rotor drive shaft, or alternatively move the tail<br />
rotor gearbox flange 1292.7 slightly further aft. When you are satisfied, remove the tail boom<br />
from the mechanics again.<br />
8
UNI-STAR 60<br />
1.7 Attaching the tail boom to the mechanics<br />
Withdraw the tail rotor from the tail boom to the point where the shaft coupling is accessible.<br />
Undo the grubscrews in the shaft coupling so that the tail rotor drive shaft <strong>4451</strong>.119 can be<br />
pulled out of it. <strong>No</strong>w carefully remove all traces of grease from the shaft, slip it into the shaft<br />
coupling as far as it will go and tighten the grubscrews to fix the shaft coupling in this position.<br />
This joint must be secure, and we recommend the following procedure: first unscrew the<br />
grubscrews from the coupling completely, apply thread-lock fluid <strong>Order</strong> <strong>No</strong>. 952 or bearing<br />
retainer fluid <strong>Order</strong> <strong>No</strong>. 951 to the internal threaded holes, then fit the grubscrews again and<br />
tighten them fully. If possible we recommend that you file a flat in the shaft on one side where<br />
the screws engage, as this ensures that the joint cannot slip. Fix the tail rotor to the tail rotor<br />
gearbox flange 1292.7 using three 2.9 x 13 mm self-tapping screws. Apply a little grease to the<br />
quick-release coupling sleeve and the tail rotor drive shaft at the front end.<br />
Attach the tail boom struts to the screws (installed in Stage 1.2) on either side of the mechanics<br />
side frames, and secure them with the bolts <strong>4451</strong>.12.<br />
The complete tail boom assembly can now be pushed into the mounting flange 1292.5 as far as<br />
it will go, taking care to check that the quick-release coupling engages correctly. Rotate the tail<br />
boom until the curve in the boom is on top, and the change in direction lies exactly in the vertical<br />
plane; rotate the tail rotor flange until the tail rotor shaft is at right-angles to the main rotor shaft<br />
when viewed from the tail of the model looking forward. With the boom correctly aligned, fix it in<br />
position with the M3 x 12 socket-head cap screw and an M3 nut in the mounting flange. We<br />
suggest that you hold the tail boom pointing vertically up when you tighten the clamping screw.<br />
Adjust the position of the rear support 1292.6 to the point where the struts 1292.108 can be<br />
attached to it with an M3 x 30 socket-head cap screw and an M3 self-locking nut.<br />
Place the mechanics flat on a level table top and adjust the position of the strut support until the<br />
distance between the bottom edge of the tail rotor flange 1292.7 and the table surface is ** mm.<br />
Tighten the strut support well in this position. Drill 1.5 mm Ø holes through the rear strut support<br />
1292.6 and the tail boom, and the mounting flange 1292.5 and the tail boom, and fit 2.2 x 6.5<br />
mm self-tapping screws to prevent the parts drifting out of alignment. Screw the vertical<br />
stabiliser 1292.4 to the tail rotor flange using 2.9 x 13 self-tapping screws and fix the horizontal<br />
stabiliser to the tail boom using the clip, wire guide and 2.9 x 19 self-tapping screws. Set the<br />
horizontal stabiliser at right-angles to the vertical stabiliser, and position the horizontal stabiliser<br />
clamp at a point 205 mm from the tail rotor flange. Tighten the screws fully.<br />
9
UNI-STAR 60<br />
1.8 Installing the skids<br />
Check that the front and rear skid clips 1291.2 are fixed to the mechanics in such a way that the<br />
countersunk holes which take the M3 nuts are on top; if necessary turn them over. Press M3<br />
nuts into the rear skid clips from above. Fit a spacer in each front bracket as shown in the<br />
drawing using an M3 x 12 socket-head cap screw, with a drop of thread-lock fluid to secure the<br />
joint.<br />
Slide the skid tubes 4447.7 through the skid bars 4447.6 and adjust the position of the bars until<br />
the distance between the fixing screw holes is 207 mm.<br />
Fix the skid bars 4447.6 to the mechanics using socket-head cap screws: M3 x 16 (rear) and<br />
M3 x 10 (front). Push the skid tubes 4447.7 into the skid bars 4447.6 as shown in the drawing<br />
and set them parallel to each other. The bars should project by about 50 mm at the rear. Drill<br />
1.5 mm Ø pilot-holes through the bars and skids from the inside, then fit 2.2 x 6.5 mm selftapping<br />
screws to prevent the skids shifting. Apply epoxy to the ends of the skid tubes and push<br />
the end-plugs into place.<br />
1.9 Silencer support (not required for "TRAINER UNI-E")<br />
Install the silencer as described in the mechanics instructions. Fit the front flange 1292.6 and<br />
the silencer holder on the tail boom and rotate it until the holder can support and secure the<br />
silencer tail pipe. Push a length of silicone exhaust hose on the tail pipe then tighten the M3 x<br />
16 socket-head cap screw.<br />
1.10 Tail rotor linkage<br />
Fit a piece of plastic tube about 5 cm long into the pushrod guide in the rear flange 1292.6, and<br />
push 5 mm lengths of silicone fuel tubing on both ends to hold it in place. To connect the tail<br />
rotor pushrod <strong>4451</strong>.3 you must first loosen the screw in the tail rotor bellcrank 4618.60, then<br />
introduce the pushrod from the tail end, plain end first, and slip it through the guide holes in the<br />
tail rotor gearbox flange, the horizontal stabiliser clip, the strut support and the guide clip on the<br />
tail linkage support <strong>4451</strong>.6. If the pushrod is stiff where it passes through the tail rotor gearbox<br />
flange, open up the hole in the flange using a 2 - 2.5 mm Ø twist drill. Connect the pushrod to<br />
the outermost hole in the bellcrank, then re-tighten the screw. The pushrod is connected to the<br />
tail rotor servo at the front end using a clevis screwed on a soldered-on threaded coupler (both<br />
included with the mechanics). You will need to shorten the pushrod before soldering it into the<br />
threaded coupler; at the centre setting of collective pitch the output arm of the tail rotor servo<br />
10
UNI-STAR 60<br />
should point straight down, and the bellcrank on the tail rotor should be at right-angles to the tail<br />
boom.<br />
Adjust and rotate the position of the linkage support <strong>4451</strong>.6 on the tail boom until the pushrod<br />
runs in as straight a line as possible, or at least in a broad, smooth curve.<br />
1.11 Installing the front cabin holder<br />
Fix the front cabin bolt to the battery holder together with the remaining spacer using an M3x25<br />
screw fitted from behind.<br />
1.12 Attaching the cabin<br />
Press rubber grommets into the three pre-cut holes in the cabin. Place the cabin on the model<br />
and push the grommets over the three mounting bolts (top both sides, bottom front) to secure<br />
the cabin.<br />
Tape the clear canopy <strong>4451</strong>.1 to the main fuselage moulding and then carefully glue it in place<br />
using cyano or Stabilit express.<br />
11
UNI-STAR 60<br />
2. Setting up<br />
The following sections can be found in the same or a similar form in the manuals of the<br />
mechanics. They are included here, too, if the mechanics used to be combined with this<br />
fuselage <strong>kit</strong> is one of the older UNI-EXPERT-Mechanics, fitted with the older plans. When<br />
building „TRAINER UNI-E“ in any case follow the instructions that come with the mechanics.<br />
2.1 Setting up the cyclic control system<br />
The basic settings of the roll and pitch-axis control systems should already be correct if you<br />
have fitted the pushrods exactly as described in these instructions. The pushrod linkage points<br />
on the servo output arms are pre-defined, so any servo travel adjustment required must be<br />
carried out via the transmitter’s electronic adjustment facilities. Please note that servo travel<br />
must not be set at too high a value; the swashplate must not foul the main rotor head when the<br />
roll and pitch-axis stick is at its end-points, as this would mean that smooth collective pitch<br />
control would no longer be possible, since the swashplate could not move any further along the<br />
shaft.<br />
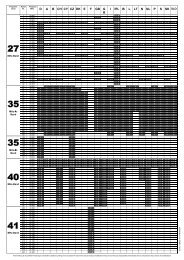
2.2 Main rotor collective pitch settings<br />
The collective pitch values are measured using a rotor blade pitch gauge (not included in the<br />
<strong>kit</strong>). The following table shows good starting points; the optimum values may vary according to<br />
the rotor blades you are using and the model itself.<br />
Minimum Hover Maximum<br />
Hovering, practice flying -2° 5,5°...6° 12°<br />
Aerobatics -4° 5°... 5,5° 8°... 9°<br />
Auto-rotation -4° 5,5° 13°<br />
The collective pitch settings are adjusted at the transmitter. This is the procedure:<br />
1. Measure the setting for hovering collective pitch and set it correctly;<br />
2. Measure collective pitch maximum and minimum, and adjust the values using the collective<br />
pitch adjustment facility on your transmitter, following the diagrams shown below:<br />
2.3 Adjusting the carburettor control system<br />
The following diagrams show two possible carburettor control curves:<br />
• The hover-optimised throttle curve produces smooth, gentle control response in the hovering<br />
range.<br />
• The values stated here vary greatly according to the motor, fuel, silencer etc. you are using.<br />
The only means of establishing the ideal settings is to carry out your own series of practical<br />
test-flights.<br />
12
UNI-STAR 60<br />
2.4 Further adjustments<br />
If you have made up all the linkages exactly as described in the previous sections, no changes<br />
to the mechanical arrangements will be necessary. The following adjustments can all be carried<br />
out at the transmitter:<br />
1. Servo direction<br />
Set the "sense" (direction of rotation) of all servos as stated in the instructions. Check the<br />
throttle servo in particular!<br />
2. Dual-Rates<br />
You can set switchable travels for roll, pitch-axis and tail rotor. As a starting point we<br />
recommend 100% and 75% as the two settings.<br />
3. Exponential<br />
For the basic set-up you should leave all control systems set to "linear".<br />
4. Sub trim<br />
Do not make any adjustments to this point. At a later stage you may wish to make minor<br />
corrections here.<br />
5. Adjusting servo travel<br />
This is where you can adjust the maximum servo travel. <strong>No</strong>te that the travels should always<br />
be the same on either side of neutral, otherwise you will end up with unwanted differential<br />
effects:<br />
For the throttle and swashplate servos (collective pitch function) it is important to check that<br />
servo travels are symmetrical, i.e. with the same values for both directions, and that the<br />
throttle servo can move the carburettor barrel from the completely closed position (motor<br />
stopped) to full throttle, without being mechanically stalled at any point. The collective pitch<br />
function of the swashplate servos should produce a range of blade pitch angles covering -5°<br />
to +13°, also with symmetrical travels; you may find it necessary to remove the servo output<br />
arm, move it round by one spline and fit the retaining screw again.<br />
The mechanics should now be set up virtually perfectly. When the throttle/collective stick is<br />
at centre (hover point) collective pitch should be about 5.5°, and the carburettor barrel should<br />
be half-open.<br />
<strong>No</strong>te:<br />
The collective pitch and throttle curves can be adjusted later to meet your exact personal<br />
requirements. However, if you have already set differential travels in the basic set-up<br />
procedure, as shown in diagram "B" above, any fine adjustments required subsequently will<br />
be more difficult!<br />
6. Collective pitch and throttle curves<br />
These adjustments are of fundamental importance to the flight performance of any model<br />
helicopter. The aim of the procedure is to maintain a constant rotor speed when the model is<br />
climbing and descending, i.e. regardless of load. This then represents a stable basis for<br />
further fine-tuning, e.g. of the torque compensation system etc. (see also P. 21, collective<br />
pitch and throttle curves).<br />
7. Static torque compensation<br />
The tail rotor servo is coupled to the collective pitch function via a mixer in the transmitter in<br />
order to compensate for torque changes when you operate the collective pitch control. On<br />
most transmitters the mixer input can be set separately for climb and descent.<br />
Recommended values for the basic settings are: climb: 35%, descent: 15%.<br />
13
UNI-STAR 60<br />
8. Gyro adjustment<br />
Gyro systems damp out unwanted rotational movements around the vertical (yaw) axis of the<br />
model helicopter. They do this by detecting the unwanted motion and injecting a<br />
compensatory signal into the tail rotor control system, and in order to achieve this effect the<br />
gyro electronics are connected between the tail rotor servo and the receiver. Many gyro<br />
systems also allow you to set two different values for gyro effect and switch between them<br />
from the transmitter via a supplementary channel. Some gyros even offer proportional<br />
control. The extra channel is controlled via a proportional slider or rotary knob, or a switch,<br />
depending on the gyro system.<br />
If your gyro system features an adjustor box with two rotary pots for two fixed settings, and<br />
you can switch between them from the transmitter, it is best to set one adjustor<br />
approximately to centre (50%), and the other to 25%. If the gyro system provides<br />
proportional control between the two set values, then the one pot should be set to "0", the<br />
other to about 80%.<br />
If you have a gyro system whose effect cannot be adjusted from the transmitter, i.e. there is<br />
only a single adjustor on the gyro electronics itself, the pot should be set to 50%<br />
effectiveness as a starting point.<br />
Check that the direction of the gyro’s compensatory action is correct, i.e. that it responds to a<br />
movement of the tail boom with a tail rotor response in the opposite direction. If this is not the<br />
case, any yaw movement of the model would be amplified by the gyro! Most gyro systems<br />
are fitted with a change-over switch which reverses its direction, and this must then be<br />
moved to the appropriate position. However, some systems have no such switch, and in this<br />
case the solution is to mount the gyro inverted.<br />
One factor which all gyro systems have in common is that flight testing is necessary in order<br />
to establish the optimum settings, as so many different influences affect the settings.<br />
The aim of the gyro adjustment process is to achieve as high a level of gyro stabilisation as<br />
possible, without the gyro causing the tail boom to oscillate.<br />
14
UNI-STAR 60<br />
3. Pre-flight checks<br />
When you have completed the model, run through the final checks listed below before the first<br />
flight:<br />
• Study the manual again and ensure that all the steps of assembly have been carried out<br />
correctly.<br />
• Check that all the screws in the ball-links and brackets are tightened fully after you have<br />
adjusted gear meshing clearance.<br />
• Can all the servos move freely, without mechanical obstruction at any point? Do they all<br />
rotate in the correct direction? Are the servo output arm retaining screws in place and tight?<br />
• Check the direction of effect of the gyro system.<br />
• Ensure that the transmitter and receiver batteries are fully charged. We recommend using a<br />
voltage monitor module (e.g. <strong>Order</strong> <strong>No</strong>. 3157) to check the state of the receiver battery on<br />
the flying field.<br />
Don’t attempt to start the motor and fly the helicopter until you have successfully checked<br />
everything as described above.<br />
Bear in mind that the running qualities of your motor will vary greatly according to the fuel in<br />
use, the glowplug, the height of your flying site above sea level and atmospheric conditions.<br />
Please read the notes on motor set-up which you will find later in this manual.<br />
4. Maintenance<br />
Helicopters, whether large or small, place considerable demands on maintenance. Whenever<br />
you notice vibration in your model, take immediate steps to reduce or eliminate it. Rotating<br />
parts, important screwed joints, control linkages and linkage junctions should be checked before<br />
every flight. If repairs become necessary be sure to use original replacement parts exclusively.<br />
Never attempt to repair damaged rotor blades; replace them with new ones.<br />
9. Fitting the starter adaptor<br />
The starter adaptor supplied with the mechanics consists of three parts which have to be fitted<br />
to your electric starter as shown in the drawing below:<br />
First push the pin 4450.5C through the aluminium shaft 4450.5B. Push the plastic adaptor<br />
4450.5A onto the aluminium shaft, checking that the projecting ends of the pin 4450.5C<br />
engages in the slots in the adaptor.<br />
Remove the holder for the rubber insert from the starter. Push the aluminium shaft onto the<br />
starter shaft until the cross-pin in the shaft engages in the channel of the adaptor. Apply threadlock<br />
fluid to the two grubscrews and tighten them fully to secure the aluminium shaft.<br />
Ensure that the adaptor runs "true", i.e. does not wobble from side to side.<br />
To start the motor engage the starter adaptor in the cooling fan from the underside, holding the<br />
starter vertical. Please note:<br />
• Do not switch the starter on until you are sure that the teeth in the cooling fan are<br />
correctly engaged with the teeth on the adaptor.<br />
• When the motor has started, switch off the starter before withdrawing it.<br />
15
UNI-STAR 60<br />
6. Adjustments during the first flight<br />
6.1 Blade tracking<br />
"Blade tracking" refers to the height of the two rotor blades when they are spinning. The<br />
adjustment procedure aims at fine-tuning the pitch of the main rotor blades to exactly the same<br />
value, so that the blades rotate at the same level.<br />
Incorrectly set blade tracking, with the blades revolving at different heights, will cause<br />
the helicopter to vibrate badly in flight.<br />
When you are adjusting blade tracking you are exactly in the "firing line" of the blades,<br />
so it is important to keep at least 5 metres away from the model in the interests of safety.<br />
You can only check blade tracking if you are able to see clearly which blade is higher and which<br />
is lower. The best method is to mark the blades with coloured tape as follows:<br />
There are two alternative methods: figure "A" shows the use of different colours on the blade<br />
tips; fig. "B" shows the use of the same colour, but applied at different distances from the blade<br />
tip.<br />
Procedure for adjusting blade tracking<br />
1. Set the helicopter to the point where it is almost lifting off, then sight directly along the rotor<br />
plane.<br />
2. If you can see that the rotor blades are running in the same plane, no adjustment is required;<br />
however, if one blade is running higher than the other, the settings must be corrected.<br />
3. Locate the pushrods between the swashplate and the mixer levers; the adjustment is made<br />
at the ball-links on both ends of these pushrods: unscrew the links to raise the blade, screw<br />
them in to lower it.<br />
16
UNI-STAR 60<br />
6.2 Adjusting the motor (skip for TRAINER UNI-E)<br />
Please be sure to read the operating instructions supplied with your motor before you<br />
start this section.<br />
The correct matching of collective pitch and throttle when the helicopter is hovering is of crucial<br />
importance to the model’s flying characteristics and performance. For example, if the pitch of<br />
the main rotor blades is too high, the motor may not reach the rotational speed intended, and<br />
this may cause you to think that the motor is not powerful enough for the job. The fact that the<br />
motor will overheat and thereby lose more power tends to reinforce that idea. For this reason<br />
first set the hovering collective pitch value exactly as described earlier in these instructions, then<br />
match the motor settings to that.<br />
Although most motors nowadays are supplied with the carburettor adjusted to approximately the<br />
right settings, final adjustment of the needle valves can only be made under practical test<br />
conditions. Most motors now feature twin-needle carburettors, and in this case the starting point<br />
for adjusting the idle / mid-range needle is to screw it in to the point where it just dips into the<br />
needle valve on the opposite side when the carburettor is half-open.<br />
Typical twin-needle carburettor<br />
For your first attempt at starting the motor open the needle valve 1½ to 2 full turns from closed,<br />
connect the glowplug to the plug battery and start the motor by engaging the adaptor on the<br />
electric starter in the teeth of the fan and switching the starter on.<br />
Caution: when the motor starts withdraw the electric starter from the fan teeth<br />
immediately, otherwise you could damage the model.<br />
When the motor is running, slowly increase throttle/collective pitch. If the fuel mixture is too<br />
"rich" and the model fails to lift off, close (screw in) the needle valve in small stages. In order to<br />
set the motor correctly for hovering you will need to adjust the idle needle, which also governs<br />
the mid-range settings. <strong>No</strong>te that any adjustment you make here is also influenced by the<br />
needle valve setting. Carefully close (screw in) the idle needle until the motor runs smoothly at<br />
hover, without any tendency to stop through too rich a mixture. If motor speed is then too low,<br />
increase the hover throttle setting at the transmitter. Never attempt to increase the motor speed<br />
for hovering by setting the idle needle too lean. The final needle valve setting can only be made<br />
with the model flying under power with "full collective", and for this reason you are bound to start<br />
by "feeling your way" slowly to the correct setting.<br />
If in any doubt, always set the mixture on the "rich" side. Initial hovering flights should<br />
always be carried out with the motor set distinctly rich.<br />
17
UNI-STAR 60<br />
7. General safety measures<br />
• Take out adequate third-party insurance cover.<br />
• Wherever possible join the local model flying club.<br />
7.1 At the flying site:<br />
• Never fly your model above spectators.<br />
• Do not fly models close to buildings or vehicles.<br />
• Avoid flying over agricultural workers in neighbouring fields.<br />
• Do not fly your model in the vicinity of railway lines, major roads or overhead cables.<br />
7.2 Pre-flight checks, flying safety:<br />
• Before you switch on the transmitter check carefully that no other model flyer is using the<br />
same frequency.<br />
• Carry out a range check with your RC system.<br />
• Check that the transmitter and receiver battery are fully charged.<br />
• Whenever the motor is running take particular care that no item of clothing can get caught on<br />
the throttle stick.<br />
• Do not let the model fly out of safe visual range.<br />
• There should always be a safe reserve of fuel in the tank. Never keep flying until the fuel<br />
runs out.<br />
7.3 Post-flight checks:<br />
• Clean oil residues and dirt from the model and check that all screws etc. are still tight.<br />
• Look for wear and damage to the helicopter, and replace worn parts in good time.<br />
• Ensure that the electronic components such as battery, receiver, gyro etc. are still securely<br />
fixed. Remember that rubber bands deteriorate with age and may fail.<br />
• Check the receiver aerial. Conductor fractures inside the flex are often not visible from the<br />
outside.<br />
• If the main rotor should touch the ground when spinning, replace the blades. Internal blade<br />
damage may not be visible from the outside.<br />
• Never carry the model by the tail boom: too firm a grip will easily deform the tail rotor<br />
pushrod.<br />
18
19<br />
UNI-STAR 60<br />
8. A few basic terms used in model helicopter flying<br />
The term "rotary wing machine" indicates that the helicopter’s lift is derived from rotating "wings"<br />
which take the form of rotor blades. As a result, a helicopter does not require a minimum<br />
forward speed in order to fly, i.e. it can hover.<br />
8.1 Cyclic pitch<br />
Cyclic pitch variation is used to steer the machine around the roll and pitch axes. Changing<br />
cyclic pitch has the effect of altering blade pitch depending on its position in the circle. The<br />
effect is caused by tilting the swashplate, which then effectively tilts the helicopter in the<br />
required direction.<br />
8.2 Collective pitch<br />
Collective pitch provides control over vertical movement, i.e. for climb and descent. The pitch of<br />
both rotor blades is altered simultaneously.<br />
8.3 Torque compensation<br />
The spinning rotor produces a moment which tends to turn the whole helicopter in the opposite<br />
direction. This effect must be accurately neutralised, and this is the task of the tail rotor. Tail<br />
rotor blade pitch is altered to vary torque compensation. The tail rotor is also used to control the<br />
model around the vertical (yaw) axis.<br />
8.4 Hovering<br />
This is the state in which the helicopter flies in a fixed position in the air, without moving in any<br />
direction.<br />
8.5 Ground effect<br />
This occurs only when the machine is close to the ground, and it falls off as altitude rises. At an<br />
altitude of about 1 - 1.5 times the rotor diameter ground effect is completely absent. <strong>No</strong>rmally<br />
the revolving airflow from the main rotor is able to flow away freely, but in ground effect the air<br />
strikes an obstacle (the ground) and forms an "air cushion". In ground effect a helicopter can lift<br />
more weight, but its positional stability is reduced, with the result that it tends to "break away" in<br />
an unpredictable direction.<br />
8.6 Climb<br />
Any excess power above that required for hovering can be exploited to make the helicopter<br />
climb. <strong>No</strong>te that a vertical climb requires more energy than an angled climb which includes<br />
forward motion. For this reason a model with a given amount of motor power will climb more<br />
rapidly at an angle than vertically.<br />
8.7 Level flight<br />
A helicopter absorbs least power when flying straight and level at about half-power. If you have<br />
trimmed the machine carefully for a steady hover, it will tend to turn to one side when flown<br />
forward. The reason for this phenomenon is that the rotor blade which is moving forward<br />
encounters an increased airflow caused by the wind, and this increases its upthrust compared<br />
with the blade which is moving downwind, where the same airflow has to be subtracted. The net<br />
result is a lateral inclination of the helicopter.<br />
8.8 Descent<br />
If the helicopter’s rotor speed is relatively low and you place the helicopter in a fast vertical<br />
descent, the result can be that insufficient air flows through the rotor. This can cause what is<br />
known as a "turbulent ring stage", when the airflow over the blade airfoil breaks away. The<br />
helicopter is then uncontrollable and will usually crash. A high-speed descent is therefore only<br />
possible if the helicopter is moving forward, or if the rotor is spinning at high speed. For the<br />
same reason care should be exercised when turning the model helicopter downwind after flying<br />
into wind.<br />
8.9 Flapping motion of the rotor blades<br />
As we have already seen, the forward-moving blade produces greater upthrust than the other<br />
blade. This effect can be minimised by allowing the forward-moving blade to rise and the other
UNI-STAR 60<br />
blade to fall. The rotor head is fitted with what is known as a flapping hinge to allow this<br />
movement, and this prevents the rotor plane tilting excessively in forward flight. In model<br />
helicopters a single hinge shared by both blades has proved a good solution to the problem.<br />
8.10 Auto-rotation<br />
This term refers to a helicopter flying without motor power. The rotational speed of the main<br />
rotor can be kept high by setting both blades to negative pitch, and the airflow through the rotor<br />
as it descends then keeps the blades turning. The rotational energy stored in the rotor by this<br />
means can be converted into upthrust when the helicopter is close to the ground, by the pilot<br />
applying positive collective pitch. Of course, this can only be done once, and it has to be done at<br />
the correct moment. Auto-rotation allows a model helicopter to land safely when the motor fails,<br />
just like a full-size machine.<br />
However, auto-rotation places considerable demands on the pilot’s judgement and reflexes; you<br />
can only halt the machine’s descent once, and you must not "flare" too early or too late. Much<br />
practice is required to get it right.<br />
20
<strong>Order</strong> <strong>No</strong>. <strong>4451</strong><br />
Uni-Star 60<br />
since ’98 series<br />
Replacement<br />
parts<br />
Date of issue 4/05<br />
GRAUPNER GmbH & Co. KG D-73230 KIRCHHEIM/TECK GERMANY
UNI-STAR 60<br />
since ’98 series<br />
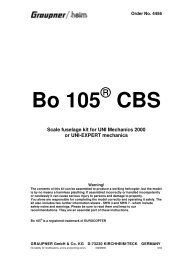
Tail boom<br />
2
UNI-STAR 60<br />
since ’98 series<br />
<strong>Graupner</strong><br />
<strong>Order</strong> <strong>No</strong>.<br />
Description<br />
Dimensions<br />
[mm]<br />
<strong>No</strong>. off<br />
Reqd./Pack<br />
1291.13 Bracket, plastic 1 / 1<br />
1292.5 Connecting flange 1<br />
1292.6 Strut support flange 2/1<br />
1292.7 Tail rotor gearbox flange 1<br />
1292.10A Tail rotor driveshaft guide 2 / 2<br />
1292.108 CFRP strut 2 / 2<br />
4447.8A Strut sockets 4<br />
<strong>4451</strong>.3 Tail rotor control rod 1,5mm Ø 1 / 2<br />
<strong>4451</strong>.4 Tuned pipe holder 2/2<br />
<strong>4451</strong>.6 Tail rotor control rod holder 1 / 1<br />
<strong>4451</strong>.7 ring guide, plasic 1 / 1<br />
<strong>4451</strong>.12 Mounting bolt (short) 8Ø x 27lg, M3 2/2<br />
<strong>4451</strong>.109 Tail boom, curved, aluminium, eloxided black 880 lg. 1 / 1<br />
<strong>4451</strong>.119 Tail rotor driveshaft 2Ø x 872 lg. 1 / 1<br />
565.10 Socket-head cap screw M3x10 1/20<br />
565.12 Socket-head cap screw M3x12 3/20<br />
565.16 Socket-head cap screw M3x16 4/20<br />
565.30 Socket-head cap screw M3x30 2/20<br />
706.30 Cheesehead screw M3x30 2/20<br />
712 Hexagon nut M3 5/20<br />
713 Self-locking nut M3 3/20<br />
747.7 Self-tapping screw 2,2x6,5 3/20<br />
746.13 Self-tapping screw 2,9x13 3/20<br />
3
UNI-STAR 60<br />
since ’98 series<br />
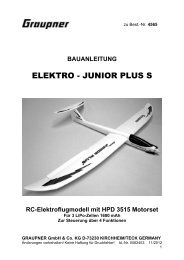
<strong>Fuselage</strong>, tail fins, skids<br />
4
UNI-STAR 60<br />
since ’98 series<br />
<strong>Graupner</strong><br />
<strong>Order</strong> <strong>No</strong>.<br />
Description<br />
Dimensions<br />
[mm]<br />
<strong>No</strong>. off<br />
Reqd./Pack<br />
1292.3 horizontal stabiliser, plastic<br />
Bracket, plastic<br />
Pushrod guide, plastic<br />
1 / 1<br />
1 / 1<br />
1 / 1<br />
1292.4 vertical stabiliser, plastic 1 / 1<br />
4447.5<br />
<strong>4451</strong>.12<br />
1292.12<br />
Set of mounting bolts, consisting of:<br />
Spacers<br />
Mounting bolts (short)<br />
Mounting bolts (long)<br />
10Øx9lg, M3<br />
8Øx27lg, M3<br />
8Øx33lg, M3<br />
3<br />
2<br />
1/2<br />
4447.6 Skid bar, black 2 / 2<br />
4447.7<br />
4447.7A<br />
Skid tubes, eloxided black<br />
End-plug, black<br />
2<br />
4<br />
<strong>4451</strong>.1 Cabin glazing 1 / 1<br />
<strong>4451</strong>.2 Cabin sides (r/l) (glued together) 1 / 1<br />
565.10 Socket-head cap screw M3x10 2 / 20<br />
565.12 Socket-head cap screw M3x12 2 / 20<br />
565.16 Socket-head cap screw M3x16 2 / 20<br />
706.25 Cheesehead screw M3x25 1 / 20<br />
712 Hexagon nut M3 2 / 20<br />
747.7 Self-tapping screw 2,2x6,5 4 / 20<br />
746.13 Self-tapping screw 2,9x13 2 / 20<br />
746.19 Self-tapping screw 2,9x19 2 / 20<br />
3513.3 Grommet 3 / 10<br />
Accessories:<br />
<strong>Graupner</strong><br />
<strong>Order</strong> <strong>No</strong>.<br />
Description<br />
Dimensions<br />
[mm]<br />
<strong>No</strong>. off<br />
Reqd./Pack<br />
<strong>4451</strong>.97 Decor pink/blue/yellow 1<br />
<strong>4451</strong>.98 Decor dark blue/medium blue/light blue 1<br />
<strong>4451</strong>.99 Decor red/green/gray 1<br />
2239A Stainless steel manifold (rear exhaust) 1<br />
2238A Stainless steel manifold (side exhaust) 1<br />
2240 Stainless steel tuned muffler 1<br />
2250 Aluminium tuned pipe, for maximum power 1<br />
60 Main rotor blades, wood, Standard 60 625x65 1 Paar<br />
1266 Main rotor blades, CFRP, symmetr. 686x60 1 Paar<br />
5