倒立振子のモデル化と制御
倒立振子のモデル化と制御
倒立振子のモデル化と制御

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1 <br />
, , <br />
<br />
, . , <br />
, , <br />
. , <br />
, <br />
<br />
.<br />
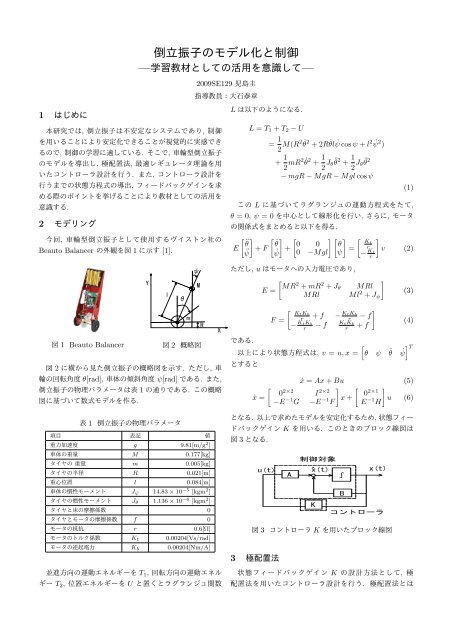
2 <br />
, <br />
Beauto Balancer 1 [1].<br />
1 Beauto Balancer<br />
<br />
——<br />
<br />
<br />
<br />
<br />
2009SE129 <br />
<br />
<br />
<br />
2 <br />
2 . , <br />
θ[rad], ψ[rad] . ,<br />
1 . <br />
.<br />
<br />
<br />
L .<br />
L = T 1 + T 2 − U<br />
= 1 2 M(R2 ˙θ2 + 2R ˙θl ˙ψ cos ψ + l 2 ˙ψ 2 )<br />
+ 1 2 mR2 ˙θ2 + 1 2 J θ ¨θ 2 + 1 2 J θ ¨θ 2<br />
− mgR − MgR − Mgl cos ψ<br />
(1)<br />
L ,<br />
θ = 0, ψ = 0 , , <br />
.<br />
[ [ [ [ ] [ ¨θ¨ψ] ˙θ˙ψ]<br />
0 0 θ<br />
Kt<br />
]<br />
E + F +<br />
= r<br />
0 −Mgl]<br />
ψ − K v (2)<br />
t<br />
r<br />
, u ,<br />
[ ]<br />
MR<br />
E =<br />
2 + mR 2 + J θ MRl<br />
MRl Ml 2 + J ψ<br />
.<br />
F =<br />
[ Kt K b<br />
r<br />
+ f − K ]<br />
tK b<br />
r<br />
− f<br />
− f + f<br />
− K tK b<br />
r<br />
K t K b<br />
r<br />
, v = u, x =<br />
<br />
[<br />
ẋ =<br />
0 2×2 I 2×2<br />
−E −1 G −E −1 F<br />
(3)<br />
(4)<br />
[<br />
θ ψ ˙θ<br />
] T<br />
˙ψ<br />
ẋ = Ax + Bu (5)<br />
] [ ]<br />
0<br />
2×1<br />
x + u (6)<br />
E −1 H<br />
1 <br />
<br />
g 9.81[m/g 2 ]<br />
M 0.177[kg]<br />
m 0.005[kg]<br />
R 0.021[m]<br />
l 0.084[m]<br />
J ψ 14.83 × 10 −5 [kgm 2 ]<br />
J θ 1.136 × 10 −6 [kgm 2 ]<br />
0<br />
f 0<br />
r 0.6[Ω]<br />
K t 0.00204[Vs/rad]<br />
K b 0.00204[Nm/A]<br />
T 1 , <br />
T 2 , U <br />
. , <br />
K . <br />
3 .<br />
<br />
<br />
<br />
<br />
<br />
<br />
3 K <br />
3 <br />
K , <br />
.
A + BK . <br />
, .<br />
, <br />
K .<br />
, Beauto Balancer 3.3[V] <br />
, .<br />
<br />
<br />
.<br />
<br />
(−30 −20 −4 −5) (7)<br />
K<br />
K = [−0.21 −14.85 −0.115 −0.78] (8)<br />
<br />
(−1 −1 −1 −1) (9)<br />
K<br />
K = [0.00 −7.34 −0.002 −0.02] (10)<br />
t[s], θ = 0, ψ = π/12, ˙θ = 0,<br />
˙ψ = 0 . <br />
.<br />
, R <br />
. ,<br />
Q, R <br />
. .<br />
K<br />
⎛<br />
⎞<br />
3 0 0 0<br />
⎜0 1 0 0⎟<br />
Q = ⎝<br />
0 0 1.5 0<br />
⎠ , R = 100 (12)<br />
0 0 0 2<br />
K = [−0.17 −20.14 −0.17 −1.17] (13)<br />
<br />
K<br />
⎛ ⎞<br />
1 0 0 0<br />
⎜0 1 0 0⎟<br />
Q = ⎝<br />
0 0 1 0<br />
⎠ , R = 10000 (14)<br />
0 0 0 1<br />
K = [−0.01 −14.62 −0.025 −0.49] (15)<br />
. <br />
t[s], θ = 0, ψ = π/12, ˙θ = 0, ˙ψ = 0<br />
.<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
u[V]<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
t [s]<br />
[(a) ]<br />
<br />
ψ[V]<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
t [s]<br />
[(b) ]<br />
4 <br />
, <br />
. , <br />
K .<br />
4 <br />
<br />
. [2] , <br />
J (8) .<br />
J =<br />
∫ ∞<br />
0<br />
(x(t) T Qx(t) + u(t) T Ru(t))dt (11)<br />
<br />
, .<br />
, 3.3[V] <br />
<br />
u[V]<br />
<br />
<br />
<br />
t [s]<br />
[(a) ]<br />
ψ[V]<br />
<br />
<br />
<br />
<br />
t [s]<br />
[(b) ]<br />
5 <br />
<br />
, <br />
.<br />
5 <br />
, , <br />
. <br />
<br />
, , <br />
. , <br />
.<br />
<br />
<br />
[1] Beauto Balancer http://www.vstone.co.jp/robot/<br />
[2] : MATLAB/Simulink ,