二車輪型倒立振子の姿勢制御
二車輪型倒立振子の姿勢制御
二車輪型倒立振子の姿勢制御

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2009SE136 <br />
:<br />
1 <br />
Vstone <br />
BeatoBalancerDuo(<br />
BBD) .<br />
2 <br />
BBD <br />
, <br />
. <br />
1<br />
BeautoBalancerDuo <br />
, <br />
, [1]. BBD 2 <br />
, 1.2[V] <br />
.<br />
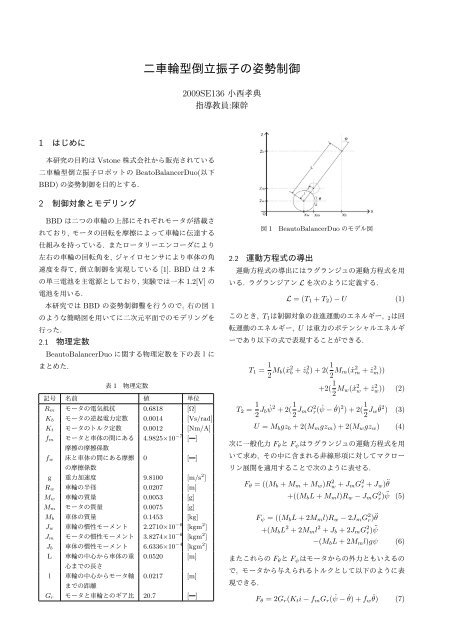
BBD , 1<br />
<br />
.<br />
2.1 <br />
2.2 <br />
<br />
. L .<br />
L = (T 1 + T 2 ) − U (1)<br />
, T 1 , 2 <br />
, U <br />
.<br />
BeautoBalancerDuo <br />
.<br />
1<br />
<br />
<br />
R m 0.6818 [Ω]<br />
K b 0.0014 [Vs/rad]<br />
K t 0.0012 [Nm/A]<br />
4.9825×10 −7 [ ]<br />
f m<br />
f w<br />
<br />
<br />
<br />
0 [ ]<br />
g 9.8100 [m/s 2 ]<br />
R w 0.0207 [m]<br />
M w 0.0053 [g]<br />
M m 0.0075 [g]<br />
M b 0.1453 [kg]<br />
J w 2.2710×10 −6 [kgm 2 ]<br />
J m 3.8274×10 −6 [kgm 2 ]<br />
J b 6.6336×10 −4 [kgm 2 ]<br />
L 0.0520 [m]<br />
l<br />
<br />
<br />
<br />
0.0217 [m]<br />
G r 20.7 [ ]<br />
T 1 = 1 2 M b(ẋ 2 b + żb 2 ) + 2( 1 2 M m(ẋ 2 m + żm))<br />
2<br />
+2( 1 2 M w(ẋ 2 w + żw)) 2 (2)<br />
T 2 = 1 2 J ˙ψ b 2 + 2( 1 2 J mG 2 r( ˙ψ − ˙θ) 2 ) + 2( 1 2 J ˙θ w 2 ) (3)<br />
U = M b gz b + 2(M m gz m ) + 2(M w gz w ) (4)<br />
F θ F ψ <br />
, <br />
.<br />
F θ = ((M b + M m + M w )Rw 2 + J m G 2 r + J w )¨θ<br />
+((M b L + M m l)R w − J m G 2 r) ¨ψ (5)<br />
F ψ = ((M b L + 2M m l)R w − 2J m G 2 r)¨θ<br />
+(M b L 2 + 2M m l 2 + J b + 2J m G 2 r) ¨ψ<br />
−(M b L + 2M m l)gψ (6)<br />
F θ F ψ <br />
, <br />
.<br />
F θ = 2G r (K t i − f m G r ( ˙ψ − ˙θ) + f w ˙θ) (7)
F ψ = −2G r (K t i − f m G r ( ˙ψ − ˙θ)) (8)<br />
.<br />
v = L m˙i + R m i + K b G r ( ˙ψ − ˙θ) (9)<br />
L m <br />
, L m = 0 .<br />
(9), (10), (11) <br />
F θ , F ψ .<br />
4 <br />
, x = [2π 0 0 0] <br />
, <br />
2, 3, 4 . <br />
10[s] .<br />
F θ = 2G 2 r( K tK b<br />
R m<br />
+ f m )( ˙θ − ˙ψ) + 2G r<br />
2K t<br />
R m<br />
v (10)<br />
F ψ = −2G 2 r( K tK b<br />
R m<br />
2.3 <br />
+ f m )( ˙θ − ˙ψ) − 2G r<br />
2K t<br />
R m<br />
v (11)<br />
(5), (6), (10), (11) (12) <br />
E<br />
[ ] ¨θ<br />
+ F<br />
¨ψ<br />
[ ] [ ˙θ θ<br />
+ G = Hv (12)<br />
˙ψ ψ]<br />
2<br />
<br />
, E, F, G, H .<br />
[ ]<br />
e11 e 12<br />
E =<br />
e 21 e 22<br />
e 11 = ((M b + 2M m + 2M w )Rw 2 + 2(J m G 2 r + J w ))<br />
e 12 = e 21 = ((M b L + 2M m l)R w − 2J m G 2 r)<br />
e 22 = (M<br />
[ b L 2 + 2M m l 2 + J b + 2J m G 2 r)<br />
]<br />
2(fm + K tK b<br />
R<br />
F =<br />
m<br />
)G 2 r −2( K tK b<br />
R m<br />
+ f m )G 2 r<br />
−2( K tK b<br />
R m<br />
+ f m )G 2 r 2(f m + K tK b<br />
R m<br />
)G 2 r<br />
[ ] [ ]<br />
0 0<br />
2Kt<br />
R<br />
G =<br />
, H = m<br />
0 −(M b L + M m l)g − 2K t<br />
R m<br />
(12) (13) <br />
A, B, C, x .<br />
{<br />
ẋ = Ax + Bu<br />
y = Cx<br />
[ ]<br />
O2×2 I 2×2<br />
A =<br />
, B =<br />
−E −1 G −E −1 F<br />
[<br />
C = I 2×2 , x = θ ψ ˙θ<br />
]<br />
˙ψ<br />
3 <br />
[<br />
O2×1<br />
E −1 H<br />
]<br />
(13)<br />
, <br />
[2].<br />
K <br />
Q,<br />
[<br />
R .<br />
]<br />
K = −0.1000 −39.6322 −0.1905 −5.2626<br />
[<br />
]<br />
Q = diag 1 1 0.7 1 , R = 100<br />
3 <br />
4 <br />
5 <br />
BBD . <br />
BBD <br />
. <br />
. <br />
.<br />
<br />
[1] :H8 <br />
, (2009)<br />
[2] :MATLB/Simulink ,<br />
, (2011)