18 Geissler TU-Dresden
18 Geissler TU-Dresden
18 Geissler TU-Dresden

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
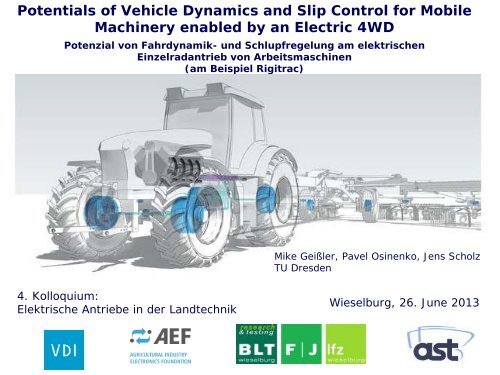
Potentials of Vehicle Dynamics and Slip Control for Mobile<br />
Machinery enabled by an Electric 4WD<br />
Potenzial von Fahrdynamik- und Schlupfregelung am elektrischen<br />
Einzelradantrieb von Arbeitsmaschinen<br />
(am Beispiel Rigitrac)<br />
Mike Geißler, Pavel Osinenko, Jens Scholz<br />
<strong>TU</strong> <strong>Dresden</strong><br />
4. Kolloquium:<br />
Elektrische Antriebe in der Landtechnik<br />
Wieselburg, 26. June 2013
Content<br />
• Short overview on existing control systems<br />
• Brief description of tire-ground dynamics<br />
• Features of Rigitrac EWD120, simulation and experimental<br />
tests<br />
•Results<br />
• Summary<br />
26.06.2013 Potential of vehicle dynamics and slip control 2<br />
2
Controlled Systems for Traction Drives<br />
in Mobile Machinery<br />
Tractor<br />
• 3pt hitch draft control (EHR)<br />
Objective: - Pulling force, position and combined control<br />
- Slip-control in pulling force control mode<br />
- Vibration damping system for transport<br />
• Adjustment of drive power (injection quantity)<br />
Self propelled machines<br />
• Pressure or volume flow control of the axle/wheel motors<br />
26.06.2013 Potential of vehicle dynamics and slip control 3<br />
3
Drive Train Concepts<br />
Fixed speed ratio of axles<br />
with leading<br />
Mechanical tension<br />
in drive train<br />
Disengagement of allwheel-drive<br />
on streets<br />
and large steering angles<br />
Transfer of motor<br />
power to one wheel<br />
Adjustment of axle<br />
speeds<br />
Lower tire wear and<br />
stress in drive train<br />
Lockable differential for<br />
all-wheel drive<br />
Torque vectoring<br />
Reduction of mech. parts<br />
within the drive train<br />
Individual vehicle<br />
traction<br />
optimized chassis<br />
concepts<br />
Oversizing (M) of the<br />
wheel motors<br />
Cost<br />
Fusion of the systems to combine the advantages<br />
26.06.2013 Potential of vehicle dynamics and slip control 4<br />
4
Advantages of Electrical Drives<br />
• High efficiency, especially in partial load range<br />
• 4 – quadrant operation (motor / generator)<br />
• Very good controllability, variable limit of the characteristic<br />
• Space optimized structure<br />
• Short-term overload capability of the motors<br />
•Low-wear<br />
26.06.2013 Potential of vehicle dynamics and slip control 5<br />
5
Tire-Ground Contact and Power<br />
Transmission<br />
direction<br />
tangential<br />
wheel<br />
force<br />
rolling resistance<br />
forces<br />
tractive/pulling<br />
force<br />
F ground<br />
F ground F ground<br />
slip<br />
a – driven wheel<br />
b – driven wheel w/o long. force<br />
c – pulling wheel<br />
Wheel efficiency<br />
power loss<br />
effective power<br />
Source: Renius K. Th.: Traktoren – Technik und ihre Anwendung. BLV Verlagsgesellschaft mbH, München, 1987.<br />
26.06.2013 Potential of vehicle dynamics and slip control 6<br />
6<br />
slip
Utilization of a Tractor<br />
power<br />
auxiliary loss<br />
gearbox<br />
loss<br />
rolling<br />
loss<br />
engine power<br />
I<br />
II<br />
slip<br />
loss<br />
drawbar<br />
power<br />
I highest energy efficiency<br />
II max. draw bar power<br />
Optimization of fuel cost<br />
and time<br />
slip increase<br />
tractor effici.<br />
drawbar force<br />
total efficiency<br />
Source: Renius K. Th.: Traktoren – Technik und ihre Anwendung. BLV Verlagsgesellschaft mbH, München, 1987.<br />
26.06.2013 Potential of vehicle dynamics and slip control 7<br />
7
Control Approach<br />
Steering, Different soil conditions, non-zero draft force angle (γ)<br />
- Slip control by wheel torque adjustment<br />
- Yaw control by torque vectoring<br />
lift<br />
yaw<br />
wheel forces during plugging<br />
force for each wheel<br />
wheel in<br />
furrow<br />
wheel not in<br />
furrow<br />
pitch<br />
drift<br />
roll<br />
drag<br />
slip<br />
Verification in simulation model and on test stand<br />
Source: Renius K. Th.: Traktoren – Technik und ihre Anwendung. BLV Verlagsgesellschaft mbH, München, 1987.<br />
26.06.2013 Potential of vehicle dynamics and slip control 8<br />
8
Diesel Electric Single-Wheel Drive<br />
combustion engine<br />
95 kW at 2000 1/min<br />
brake resistor<br />
P nenn<br />
= 40 kW<br />
P max<br />
= 200 kW<br />
liquid cooling<br />
suspension<br />
4-wheel steering with hydropneumatic<br />
single wheel<br />
suspension<br />
generator<br />
90 kW at 2000 1/min<br />
liquid cooling<br />
DC Link<br />
350 – 650 V<br />
max. 700 V<br />
4 wheel drives<br />
tire 540/60 R28<br />
v max<br />
= 65 km/h<br />
M nenn<br />
= 8200 Nm<br />
M max<br />
= 14000 Nm<br />
P nenn<br />
= 33 kW<br />
P max<br />
= 44 kW<br />
liquid cooling<br />
26.06.2013 Potential of vehicle dynamics and slip control 9<br />
9
Simulation Model<br />
input signals<br />
vehicle body and<br />
wheels<br />
contact dynamics<br />
Engine and<br />
Generator<br />
electric motors<br />
output of result<br />
identification,<br />
control,<br />
logic<br />
26.06.2013 Potential of vehicle dynamics and slip control 10<br />
10
Rigitrac in Test Environment<br />
Objectives:<br />
• handling of the system<br />
• reproduce defined loads<br />
• robust system controller<br />
(static and dynamic)<br />
• efficiency of drive system<br />
• 2 x 90 kW asynchronous motors at<br />
front axle for load simulation<br />
• additional gearboxes are available<br />
for high torques<br />
Measurements:<br />
• diesel motor: n, M<br />
optional: fuel consumption<br />
• DC Link: current and voltage<br />
• 2 wheel motors: n, M<br />
• component temperatures<br />
26.06.2013 Potential of vehicle dynamics and slip control 11<br />
11
Results – Torque Vectoring<br />
yaw rate during steering from 0° to 4° at 7 km/h<br />
yaw rate [deg/s]<br />
angle<br />
steering angle [deg]<br />
with control<br />
w/o control<br />
time [s]<br />
26.06.2013 Potential of vehicle dynamics and slip control 12<br />
12
Results – Torque Vectoring<br />
with Yaw Control<br />
yaw rate and torque difference during<br />
cornering at 10 km/h<br />
slip of rear axle and steering angle<br />
change during cornering at 10 km/h<br />
yaw rate [deg/s]<br />
yaw rate<br />
torque diff.<br />
torque difference [Nm]<br />
slip rear axle [%]<br />
slip left<br />
slip right<br />
steer. angle<br />
steering angle [deg]<br />
time [s]<br />
time [s]<br />
26.06.2013 Potential of vehicle dynamics and slip control 13<br />
13
Results – Slip Control at Constant Speed<br />
torque [Nm]<br />
slip [%] and controller status<br />
speed [m/s]<br />
motor speed [rpm]<br />
26.06.2013 Potential of vehicle dynamics and slip control 14<br />
14
Results – Slip with Yaw Rate Control<br />
slip and drawbar force - 12 kN and γ=20° at<br />
7 km/h - w/o control<br />
slip and drawbar force - 12 kN and γ=20° at<br />
7 km/h - with control<br />
slip rear axle [%]<br />
slip left<br />
slip right<br />
force<br />
drawbar force [s]<br />
slip rear axle [%]<br />
slip left<br />
slip right<br />
force<br />
drawbar force [s]<br />
time [s]<br />
yaw rate at different drawbar forces – 7 km/h<br />
time [s]<br />
yaw rate [deg/s]<br />
w/o control<br />
time [s]<br />
26.06.2013 Potential of vehicle dynamics and slip control 15<br />
15
Summary<br />
- Electric drives enables more accurate control strategies for<br />
mobile machinery<br />
- Electric single wheel drives allows dynamic power<br />
distribution to handle any particular situation<br />
- Torque vectoring improves motion stability and vehicle<br />
handling<br />
- Single wheel slip control coupled with torque vectoring<br />
allows to optimally utilize drive train power<br />
26.06.2013 Potential of vehicle dynamics and slip control 16<br />
16
Thank you for your<br />
attention!<br />
<strong>TU</strong> <strong>Dresden</strong><br />
Lehrstuhl Agrarsystemtechnik<br />
01062 <strong>Dresden</strong><br />
e-mail: geissler@ast.mw.tu-dresden.de<br />
26.06.2013 Potential of vehicle dynamics and slip control 17<br />
17