


Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
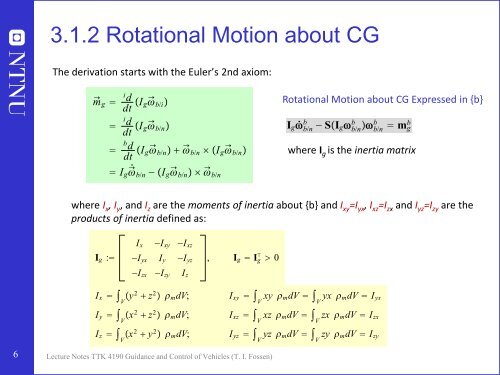
3.1.2 Rotational Motion about CG<br />
The derivation starts with the Euler’s 2nd axiom:<br />
m g i d<br />
dt<br />
I g b/i <br />
i d<br />
dt<br />
I g b/n <br />
b d<br />
dt<br />
I g b/n b/n I g b/n <br />
I g b/n I g b/n b/n #<br />
Rotational Motion about CG Expressed in {b}<br />
b<br />
I g b/n<br />
SI g b b<br />
b/n b/n<br />
m g<br />
b<br />
where I g is the inertia matrix<br />
where I x , I y , and I z are the moments of inertia about {b} and I xy =I yx , I xz =I zx and I yz =I zy are the<br />
products of inertia defined as:<br />
I g :<br />
I x I xy I xz<br />
I yx I y I yz , I g I g 0 #<br />
I zx I zy I z<br />
I x V<br />
y 2 z 2 m dV;<br />
I y V<br />
x 2 z 2 m dV;<br />
I z V<br />
x 2 y 2 m dV;<br />
I xy V<br />
xy m dV V<br />
yx m dV I yx<br />
I xz V<br />
xz m dV V<br />
zx m dV I zx<br />
I yz V<br />
yz m dV V<br />
zy m dV I zy<br />
6<br />
Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)














