ROTATIONS AND THE MOMENT OF INERTIA TENSOR 1. Rotation ...
ROTATIONS AND THE MOMENT OF INERTIA TENSOR 1. Rotation ...
ROTATIONS AND THE MOMENT OF INERTIA TENSOR 1. Rotation ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>ROTATIONS</strong> <strong>AND</strong> <strong>THE</strong> <strong>MOMENT</strong> <strong>OF</strong> <strong>INERTIA</strong> <strong>TENSOR</strong><br />
JACOB HUDIS<br />
Abstract. This is my talk for second year physics seminar taught by Dr.<br />
Henry. In it I will explain the moment of inertia tenssor. I explain what the<br />
tensor is used for and how it is used. I will also explain both physically and<br />
mathematically how and why an object can precess.<br />
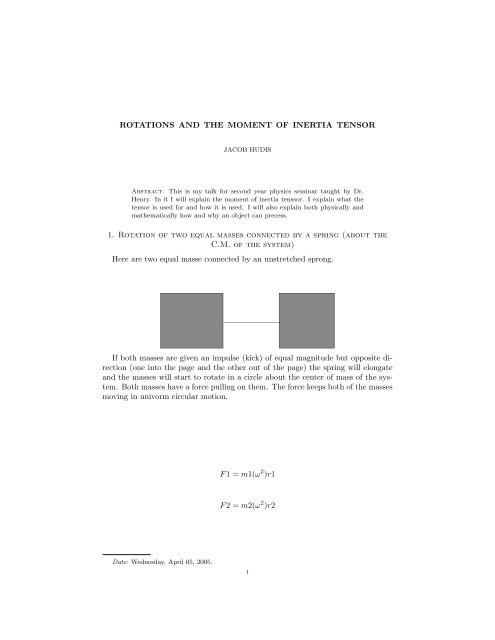
<strong>1.</strong> <strong>Rotation</strong> of two equal masses connected by a spring (about the<br />
C.M. of the system)<br />
Here are two equal masse connected by an unstretched sprong.<br />
If both masses are given an impulse (kick) of equal magnitude but opposite direction<br />
(one into the page and the other out of the page) the spring will elongate<br />
and the masses will start to rotate in a circle about the center of mass of the system.<br />
Both masses have a force pulling on them. The force keeps both of the masses<br />
moving in univorm circular motion.<br />
F 1 = m1(ω 2 )r1<br />
F 2 = m2(ω 2 )r2<br />
Date: Wednesday, April 05, 2005.<br />
1
2 JACOB HUDIS<br />
It is important to note the the angular momentum L and the angular velocity ω<br />
are in the same direction. (They point up to the top of the screen.)<br />
If this system of two masses connected by a massless spring was put in space<br />
(far from external forces) and given the correct initial conditions, it would rotate<br />
in uniform circular motion forever (unless acted on by and external torque).<br />
2. <strong>Rotation</strong> of a thin plate<br />
Imagine a plate is rotated about its lower edge with omege (fix) in the y-direction.
PBS 3<br />
One can ask the question ”What is the angular momentum of the plate about its<br />
lower left hand corner?” (you can ask that question about any point on the plate,<br />
but I will calculate it for the angular momentum about the lower left hand corner.<br />
Remember, L = rxp where r is a vector from one point in space.) The way you<br />
calculate the angular momentum of an extended object is to brake the object (plate<br />
in our case) up into many small area (or mass) elements and sum the angular momentum<br />
of each one. This gives the angular moment of the entire object about a<br />
given point.<br />
For the plate<br />
L = ∑ n<br />
i=0 r ixp i<br />
In the above equation, x is the cross product. At this instance in time (the previous<br />
picture), p i = mv i = mz i ω in the x direction. (You have to imagine braking<br />
the plate up into N small squares and labeling each one 1 to N where i is the index<br />
of the square you are talking about).<br />
And equation for angular momentum turns out to be<br />
n∑<br />
L = (y i ŷ + z i ẑ)x(mz i ωˆx)<br />
i=0<br />
n∑<br />
[m i ω(z i x i ŷ − y i x i ẑ)]<br />
i=0<br />
You can see from the above equation that L (angular momentum) and ω (angular<br />
velocity) are not in the same direction.
4 JACOB HUDIS<br />
If a plate is given the initial conditions that it is being spun about its lower edge<br />
with /omega in the /haty direction, the book will not continue spinning that way.<br />
Someone has to put an external torque on the book to keep it spinning that way.<br />
You can see this because L is not constant in time. As the plate spins (assuming it<br />
keeps spinning with /omega in the y-direction /omega will form a cone about the<br />
y-axis. The net torque is equal to the time derivative of the angular momentum and<br />
because the angular momentum would be changing in time, someone or something<br />
would have to exert and external torque on the book for it to keep spinning that way.<br />
To sum it up, if a book is given the initial conditions such that it is being spun<br />
about its lower edge with ω in the ŷ direction, the book would not continue spinning<br />
that way; something else would happen.<br />
3. The inertia tensor<br />
The inertia tensor allows one to calculate the angular momentum of an object<br />
when that object is spun about any axis (i.e. about any point). To use the inertia<br />
tensor, you must specify the orientation of a coordinate system (thus it is a tensor).<br />
The form of the inertia tensor is the volume integral of the below matrix times<br />
the density (look it up in any mechanics book).<br />
⎡<br />
⎤<br />
⎣ (x2 + y 2 ) −xy −xz<br />
−yx (x 2 + z 2 ) −yz ⎦<br />
−zx −zy (x 2 + y 2 )
PBS 5<br />
3.<strong>1.</strong> an example. Here I am going to calculate the moment of inertia tensor for a<br />
plate. I will pick a yx-cartesian system with the origin at the left hand side of the<br />
plate.<br />
I will show how to calculate the I zz component of the above matrix and the<br />
others are done the same way.<br />
I zz = ∫ (x 2 + y 2 )dv this is = 2a 2 m/3<br />
The inter inertia tensor is as follows.<br />
⎡<br />
⎣<br />
1/3 −1/4 0<br />
−1/4 1/3 0<br />
0 0 2/3<br />
Notice that the inertia tensor (for this example) is not diagonal. This means that<br />
if you rotate the plate along x or y, L and omega won’t be in the same direction.<br />
For the given cartesian system, x and y are not principle axis.<br />
another way to see this is if you multiply the above matrix by the vector<br />
and you will get<br />
⎡<br />
⎣<br />
⎡<br />
⎣ wx<br />
⎤<br />
0 ⎦<br />
0<br />
1/3wx<br />
−1/4wx<br />
0<br />
This demonstrates mathematically that L and W are not in the same direction.<br />
It is possable to diagonalize the inertia tensor and find the principle axis. If you<br />
do diagonalize the above matrix (you should try it out) one of the eigenvalues you<br />
will get (moment of inertia value) is I=1/12. The eigenvalue corresponding to the<br />
moment of inertia you get is:<br />
⎤<br />
⎦<br />
⎤<br />
⎦
6 JACOB HUDIS<br />
⎡<br />
⎣ frac12.5<br />
−1/4wx<br />
0<br />
⎤<br />
⎦<br />
If the plate is rotated by ω = frac12(x+y) L and W will be in the same direction<br />
and I (the moment of inertia) will equal 1/12.<br />
The picture of this is given below.
PBS 7
8 JACOB HUDIS<br />
Every point on the plate is kept in circular motion by a force pulling it to the<br />
center. The net force on the plate is zero because there is an equal and opposite<br />
force balencing each particle on the plate. This is because there is another particle<br />
on the oppside of the plate (mirror symetry) that is also moving in univorm circle<br />
motion. If the plate is set up such that it is spinning along its diagonal (or any<br />
of its principle axis; the diagonal is not the only one) it would rotate, in uniform<br />
circular motion, forever, unless acted on my an external torque.<br />
3.2. precession. The idea of precession is simply this: IF AN OBJECT IS NOT<br />
ROTATING ABOUT ONE <strong>OF</strong> ITS PRINCIPLE AXIS ITS ANGULAR VELOC-<br />
ITY WILL BE CHANGING WITH TIME EVEN THOUGH NO TORQUE WILL<br />
BE APPLIED TO <strong>THE</strong> OBJECT. This seems to violate the formula T = Iω However,<br />
that is not correct because this formula only works if I is a principle moment<br />
of inertia and the torque is parallel to the principle axis. Below I give an example<br />
to illestrate this idea.
PBS 9<br />
A massless rod connects 2 equal masses. <strong>THE</strong> COORDINATE SYSTEM WE<br />
ARE WORKING IN IS Z-UP/DOWN, Y RIGHT/LEFT <strong>AND</strong> X INTO <strong>AND</strong> OUT<br />
<strong>OF</strong> <strong>THE</strong> PAGE.<br />
Imagine the<br />
ω = w xˆx + w z ẑ<br />
(obviously w y = 0)<br />
L (angular momentum can always be written in the following form<br />
L = I 1 w 1 + I 2 w 2 + I 3 w 3<br />
In this formula I i where i can be 1, 2 or 3 are the moments of inertia of an<br />
object about a STATIONARY REFERENCE FRAME (CARTESIAN SYSTEM).<br />
It is easiest to use 3 principle moments of inertia.<br />
So, for the given example<br />
L = I 1 w 1 + I 3 w 3<br />
You can see from the picture that<br />
I 1 = 2mr 2 (the rod is 2r in length) and I 3 = e where e is a very small number<br />
This is the moment of inertia of the rod at time t=0 seconds. A small time<br />
later, the rod has rotated a little about x and a little about z and it has changed<br />
positions. It will look something like this:
10 JACOB HUDIS<br />
This picture is exagerated so you can see what is happening (In real life after a<br />
short time the angle wouldn’t be anywhere as near as large as I have drawn it to<br />
be.). This object has been given an angular velocity<br />
W = w x hatx + w z hatz<br />
in a location far from any external influences. The net torque acting on this object<br />
is zero therefore the angular momentum L must be constant. As I stated before,<br />
the angular moment of this object with the above given angular velocity is<br />
L = I 1 w 1 + I 3 w 3<br />
At time t=0 seconds I 1 = 2mr 2 and I 3 = e Now, look at the above figure. Later<br />
in time, I 1 = 2mr 2 , it has not changed but what about I 3 ? You can see from the<br />
picture that I 3 has increased. The perpendicular distence from the z-axis to one of
PBS 11<br />
the masses has increased. ( I 3 >> e)<br />
There is no torque acting on the two masses. So, angular momentum L has<br />
to be constant in time. But, as I have just shown the moment of inertia of the<br />
object(about its center of mass) is changing with time. The moment of inertia is<br />
given by the formula<br />
L = I 1 w 1 + I 3 w 3<br />
So, even though the net external torque on the system is =0, the angular momentum<br />
of the system is not a constant but rather changes with time.<br />
The main poing: If an object is not rotated about a principle axis, its angular<br />
velocity will not remain constant in time even though its angular momentum and<br />
torque are.