

Routh-Hurwitz criterion (review) - UBC Mechanical Engineering ...
Routh-Hurwitz criterion (review) - UBC Mechanical Engineering ...
Routh-Hurwitz criterion (review) - UBC Mechanical Engineering ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
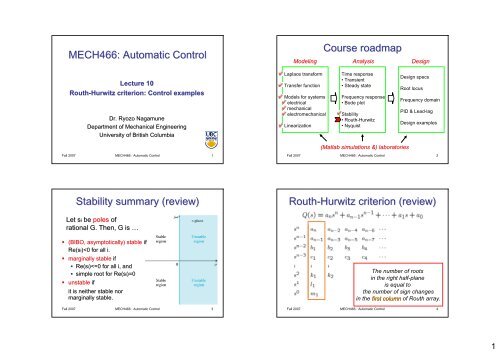
MECH466: Automatic Control<br />
Modeling<br />
Course roadmap<br />
Analysis<br />
Design<br />
Lecture 10<br />
<strong>Routh</strong>-<strong>Hurwitz</strong> <strong>criterion</strong>: Control examples<br />
Dr. Ryozo Nagamune<br />
Department of <strong>Mechanical</strong> <strong>Engineering</strong><br />
University of British Columbia<br />
Laplace transform<br />
Transfer function<br />
Models for systems<br />
• electrical<br />
• mechanical<br />
• electromechanical<br />
Linearization<br />
Time response<br />
• Transient<br />
• Steady state<br />
Frequency response<br />
• Bode plot<br />
Stability<br />
• <strong>Routh</strong>-<strong>Hurwitz</strong><br />
• Nyquist<br />
Design specs<br />
Root locus<br />
Frequency domain<br />
PID & Lead-lag<br />
Design examples<br />
(Matlab<br />
simulations &) laboratories<br />
Fall 2007 MECH466 : Automatic Control 1<br />
Fall 2007 MECH466 : Automatic Control 2<br />
Stability summary (<strong>review</strong>)<br />
<strong>Routh</strong>-<strong>Hurwitz</strong> <strong>criterion</strong> (<strong>review</strong>)<br />
Let si be poles of<br />
rational G. Then, G is …<br />
• (BIBO, asymptotically) stable if<br />
Re(si)
Why no proof in textbooks?<br />
An Elementary Derivation of the <strong>Routh</strong>–<strong>Hurwitz</strong> Criterion<br />
Ming-Tzu Ho, Aniruddha Datta, and S. P. Bhattacharyya<br />
IEEE Transactions on Automatic Control<br />
vol. 43, no. 3, 1998, pp. 405-409.<br />
“most undergraduate students are exposed to the<br />
<strong>Routh</strong>–<strong>Hurwitz</strong> <strong>criterion</strong> in their first introductory<br />
controls course. This exposure, however, is at the<br />
purely algorithmic level in the sense that no attempt<br />
is made whatsoever to explain why or how such an<br />
algorithm works.”<br />
Why no proof in textbooks? (cont’d)<br />
“The principal reason for this is that the classical<br />
proof of the <strong>Routh</strong>-<strong>Hurwitz</strong> <strong>criterion</strong> relies on the<br />
notion of Cauchy indexes and Sturm’s s theorem,<br />
both of which are beyond the scope of<br />
undergraduate students.”<br />
“<strong>Routh</strong>-<strong>Hurwitz</strong> <strong>criterion</strong> has become one of the few<br />
results in control theory that most control engineers<br />
are compelled to accept on faith.”<br />
Fall 2007 MECH466 : Automatic Control 5<br />
Fall 2007 MECH466 : Automatic Control 6<br />
Example 1<br />
Example 1: K(s)=K<br />
• Characteristic equation<br />
• Design K(s) ) that stabilizes the closed-loop<br />
loop<br />
system for the following cases.<br />
• K(s) ) = K (constant)<br />
• K(s) ) = KP+KK<br />
+KI/s (PI (Proportional-Integral) controller)<br />
• <strong>Routh</strong> array<br />
Fall 2007 MECH466 : Automatic Control 7<br />
Fall 2007 MECH466 : Automatic Control 8<br />
2
Example 1: K(s)=K<br />
)=KP+KI/s<br />
• Characteristic equation<br />
Example 1: Range of (KP,K<br />
,KI)<br />
• From <strong>Routh</strong> array,<br />
• <strong>Routh</strong> array<br />
3.5<br />
3<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
-1 0 1 2 3 4 5 6 7 8 9<br />
Fall 2007 MECH466 : Automatic Control 9<br />
Fall 2007 MECH466 : Automatic Control 10<br />
Example 1: K(s)=K<br />
)=KP+KI/s (cont’d)<br />
• Select KP=3 K<br />
(
Announcements<br />
• Midterm exam: October 19 (Friday) 12-12:50pm<br />
12:50pm<br />
• New lab dates<br />
• Group B, Lab #2 (for Thanksgiving holiday):<br />
• B4-B6: B6: Oct.10 (Wed), 4pm-6pm (Report due: Oct.24)<br />
• B1-B3: B3: Oct.10 (Wed), 6pm-8pm (Report due: Oct.24)<br />
• Group A, Lab #5 (for Remembrance day):<br />
• A1-A6: A6: Nov. 21 (Wed), 4pm-6pm (Report due: Dec.4)<br />
• Contact Mr. Roland Lang (hxlang@mech.ubc.ca(<br />
hxlang@mech.ubc.ca) ) if you<br />
need time rearrangement.<br />
• To hand in lab report other than lab time, hand in it to the<br />
instructor (In such cases, due time is 6pm).<br />
Fall 2007 MECH466 : Automatic Control 13<br />
Example 2<br />
• Determine the range of K and a that stabilize the<br />
closed-loop loop system.<br />
Fall 2007 MECH466 : Automatic Control 14<br />
Example 2 (cont’d)<br />
Example 2 (cont’d)<br />
• Characteristic equation<br />
Fall 2007 MECH466 : Automatic Control 15<br />
Fall 2007 MECH466 : Automatic Control 16<br />
4
• <strong>Routh</strong> array<br />
Example 2 (cont’d)<br />
• If K=35, oscillation frequency is obtained by the<br />
auxiliary equation<br />
Summary and Exercises<br />
• Control examples for <strong>Routh</strong>-<strong>Hurwitz</strong> <strong>criterion</strong><br />
• P controller gain range for stability<br />
• PI controller gain range for stability<br />
• Oscillation frequency<br />
• Characteristic equation<br />
• Next<br />
• Time domain specifications<br />
• Exercises<br />
• Read Section 6-56<br />
5 again.<br />
• Problems 6-9, 6<br />
6-10. 6<br />
Fall 2007 MECH466 : Automatic Control 17<br />
Fall 2007 MECH466 : Automatic Control 18<br />
More example 1<br />
More example 2<br />
<strong>Routh</strong> array<br />
Derivative of auxiliary poly.<br />
<strong>Routh</strong> array<br />
Derivative of auxiliary poly.<br />
2<br />
(Auxiliary poly. is a factor of Q(s).)<br />
4<br />
4<br />
No sign changes<br />
in the first column<br />
No root in OPEN(!) RHP<br />
2<br />
No sign changes<br />
in the first column<br />
No root in OPEN(!) RHP<br />
Fall 2007 MECH466 : Automatic Control 19<br />
Fall 2007 MECH466 : Automatic Control 20<br />
5
More example 3<br />
<strong>Routh</strong> array<br />
Derivative of auxiliary poly.<br />
4 0<br />
One sign changes<br />
in the first column<br />
One root in OPEN(!) RHP<br />
Fall 2007 MECH466 : Automatic Control 21<br />
6














