

MECH550F: Multivariable Feedback Control Today's topics Why ...
MECH550F: Multivariable Feedback Control Today's topics Why ...
MECH550F: Multivariable Feedback Control Today's topics Why ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
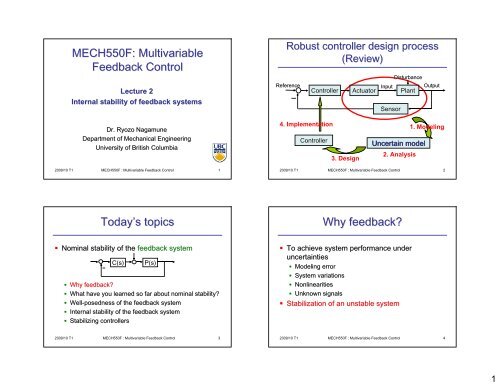
<strong>MECH550F</strong>: <strong>Multivariable</strong><br />
<strong>Feedback</strong> <strong>Control</strong><br />
Lecture 2<br />
Internal stability of feedback systems<br />
Robust controller design process<br />
(Review)<br />
Reference<br />
<strong>Control</strong>ler<br />
Actuator<br />
Input<br />
Sensor<br />
Disturbance<br />
Plant<br />
Output<br />
Dr. Ryozo Nagamune<br />
Department of Mechanical Engineering<br />
University of British Columbia<br />
4. Implementation<br />
<strong>Control</strong>ler<br />
3. Design<br />
Uncertain model<br />
2. Analysis<br />
1. Modeling<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 1<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 2<br />
Today’s s <strong>topics</strong><br />
<strong>Why</strong> feedback?<br />
• Nominal stability of the feedback system<br />
C(s)<br />
P(s)<br />
• <strong>Why</strong> feedback?<br />
• What have you learned so far about nominal stability?<br />
• Well-posedness<br />
of the feedback system<br />
• Internal stability of the feedback system<br />
• Stabilizing controllers<br />
• To achieve system performance under<br />
uncertainties<br />
• Modeling error<br />
• System variations<br />
• Nonlinearities<br />
• Unknown signals<br />
• Stabilization of an unstable system<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 3<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 4<br />
1
Issue in stabilization<br />
by series connection<br />
• Consider three stable open-loop systems:<br />
• Pole/zero cancellation in unstable region by series<br />
connection is VERY BAD!<br />
• Unstable system MUST be stabilized by feedback!!!<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 5<br />
Issue in stabilization<br />
by series connection (cont’d)<br />
• <strong>Why</strong> is unstable cancellation by series<br />
connection not allowed?<br />
• Plant model is never exact! (and hence cancellation<br />
will not occur in real world.)<br />
• Neither nonzero initial condition nor input disturbance<br />
is allowed. (very fragile)<br />
• Some internal signal may go unbounded, even if<br />
output is bounded.<br />
• Internal stability (that we define later) can detect<br />
such cancellation!<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 6<br />
Today’s s <strong>topics</strong><br />
Nyquist stability criterion (Review)<br />
• Nominal stability of the feedback system<br />
C(s)<br />
P(s)<br />
• <strong>Why</strong> feedback?<br />
• What have you learned so far about nominal stability?<br />
• Well-posedness<br />
of the feedback system<br />
• Internal stability of the feedback system<br />
• Stabilizing controllers<br />
• P: # OL poles in open RHP<br />
(given)<br />
• N: # of clockwise<br />
encirclement of -11 by<br />
Nyquist plot of OL transfer<br />
function L(s) ) (counted by<br />
using Nyquist plot of L(s))<br />
15<br />
10<br />
5<br />
0<br />
-5<br />
-10<br />
-15<br />
-5 0 5 10 15<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 7<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 8<br />
2
Observer-based based control (review)<br />
Comments<br />
Plant<br />
Observer<br />
Closed-loop loop A-matrixA<br />
• Nyquist stability criterion<br />
• Graphical method to decide NS<br />
of feedback (FB) system in s-<br />
domain.<br />
• An assumption: No hidden<br />
unstable pole/zero cancellation.<br />
• Algebraic method to decide<br />
NS of FB system in s-domain,<br />
even with hidden unstable<br />
pole/zero cancellation?<br />
C(s)<br />
P(s)<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 9<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 10<br />
Today’s s <strong>topics</strong><br />
Some terminologies<br />
• Nominal stability of the feedback system<br />
• Real rational transfer function<br />
YES<br />
NO<br />
C(s)<br />
P(s)<br />
• Proper transfer function<br />
• <strong>Why</strong> feedback?<br />
• What have you learned so far about nominal stability?<br />
• Well-posedness<br />
of the feedback system<br />
• Internal stability of the feedback system<br />
• Stabilizing controllers<br />
• Strictly proper transfer function<br />
• Biproper: : Inverse is also proper<br />
• Real rational proper transfer matrix<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 11<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 12<br />
3
A feedback structure<br />
Well-posedness<br />
posedness: : Definition<br />
P1 & P2: P : real rational proper<br />
• A feedback system is called well-posed<br />
if all closed-loop loop transfer matrices are<br />
• well-defined (inverses exist) and<br />
• proper.<br />
(The argument “s” is omitted.)<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 13<br />
Remark: Any meaningful feedback system has<br />
to be well-posed!<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 14<br />
Physical meanings<br />
Examples<br />
• If not well-defined, for an external signal, the<br />
internal signal is not uniquely determined.<br />
• If not proper, for high frequency signals, the gain<br />
goes to infinity. (Physically unrealizable!)<br />
• Roughly speaking, not-well<br />
well-posed feedback<br />
system does not make sense.<br />
Ex.1<br />
Ex.2<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 15<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 16<br />
4
Examples (cont’d)<br />
Well-posedness<br />
posedness: : Condition<br />
Ex.3<br />
• The feedback system<br />
is well-posed<br />
if and only if<br />
Remark:<br />
Non-proper!<br />
because<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 17<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 18<br />
Well-posedness<br />
condition in SS<br />
Examples (cont’d)<br />
Notation:<br />
• The feedback system is well-posed if and only if<br />
Ex.4<br />
<strong>Feedback</strong> system is NOT well-posed!<br />
• A sufficient condition (We often use this!)<br />
If one of P1(s) P (s) or P2(s) P<br />
is strictly proper (i.e. D1=0 D<br />
or<br />
D2=0), =0), the feedback system is well-posed.<br />
Ex.5<br />
<strong>Feedback</strong> system is well-posed!<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 19<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 20<br />
5
Today’s s <strong>topics</strong><br />
Internal stability: Definition<br />
• Nominal stability of the feedback system<br />
C(s)<br />
P(s)<br />
• <strong>Why</strong> feedback?<br />
• What have you learned so far about nominal stability?<br />
• Well-posedness<br />
of the feedback system<br />
• Internal stability of the feedback system<br />
• Stabilizing controllers<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 21<br />
• Assume that the CL<br />
system is well-posed.<br />
• The CL system is called<br />
internally stable if<br />
All the poles are in the open LHP.<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 22<br />
Example<br />
Remarks<br />
CL system is well-posed! <strong>Why</strong>?<br />
CL system is NOT internally stable!<br />
• Internal stability is a basic requirement for a<br />
practical feedback system.<br />
• Internal stability guarantees that all signals in the<br />
CL system are bounded, provided that the<br />
exogenous signals (w) are bounded.<br />
• Exogenous signals (w) are models of, for<br />
example, initial conditions, noises, and modeling<br />
errors.<br />
• Roughly speaking, not-internally<br />
internally-stable feedback<br />
system does not work fine.<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 23<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 24<br />
6
Today’s s <strong>topics</strong><br />
Stabilizing controllers for a stable plant<br />
• Nominal stability of the feedback system<br />
C(s)<br />
P(s)<br />
• All stabilizing negative FB controllers C(s) ) for a<br />
stable plant P(s) ) is parameterized as<br />
• <strong>Why</strong> feedback?<br />
• What have you learned so far about nominal stability?<br />
• Well-posedness<br />
of the feedback system<br />
• Internal stability of the feedback system<br />
• Stabilizing controllers<br />
• Q(s) ) is any stable proper rational transfer function<br />
matrix, i.e.,<br />
• Youla parameterization (Q-parameterization)<br />
• A class of all the stabilizing controllers (even for an<br />
unstable plant: omitted in the lecture)<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 25<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 26<br />
Example<br />
Comments<br />
• Plant<br />
• All the stabilizing controllers<br />
• How to select Q?<br />
• Ex. If we want C to have an integrator,<br />
• Advantages of Youla parameterization<br />
• For a stable plant, the structure of the controller is<br />
identical to the one for (well-studied classical!)<br />
Internal Model <strong>Control</strong> (IMC).<br />
• Search over all stabilizing controllers is replaced by a<br />
search over stable Q(s).<br />
• All CL transfer functions are linear (or affine) in Q,<br />
simplifying optimization problems.<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 27<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 28<br />
7
Internal model control (IMC)<br />
Summary<br />
Q(s)<br />
Real plant<br />
P(s)<br />
• <strong>Feedback</strong> only the new information.<br />
• Design of Q(s) ) is relatively easy. (Proper and<br />
stable approximation of the inverse of P(s))<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 29<br />
• Well-posedness<br />
• Internal stability in s-domains<br />
• Stabilizing controllers<br />
• Announcements<br />
• No lecture on Sept 22 (Tue).<br />
• Today’s s HW is due Sept 22 (Tue) 5pm.<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 30<br />
Homework<br />
Homework (cont’d)<br />
• HW1: Prove<br />
• HW2: Check the well-posedness<br />
posedness, , as well as internal<br />
stability (if well-posed), for the following feedback<br />
systems. If unstable, stabilize the feedback system by<br />
modifying P2 P (P1 is fixed).<br />
•<br />
•<br />
• HW3: For MIMO feedback system (stable P(s)),<br />
verify that the following transfer functions are<br />
affine in Q(s) ) by using Youla parameterization.<br />
• From r to e<br />
• From r to u<br />
• From r to y<br />
• From d to e<br />
• From d to u<br />
• From d to y<br />
C(s)<br />
P(s)<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 31<br />
2009/10 T1 <strong>MECH550F</strong> : <strong>Multivariable</strong> <strong>Feedback</strong> <strong>Control</strong> 32<br />
8














