

Multifolded torus chaotic attractors: Design and implementation
Multifolded torus chaotic attractors: Design and implementation
Multifolded torus chaotic attractors: Design and implementation

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
013118-6 Yu, Lu, <strong>and</strong> Chen Chaos 17, 013118 2007<br />
TABLE I. Parameters a ij , b ij ,<strong>and</strong>c ij 1i, j3.<br />
a 11 a 12 a 13 a 21 a 22 a 23 a 31 a 32 a 33<br />
1.0299 −0.7954 0.3863 0.0549 −0.0424 0.0206 0.0333 −0.0257 0.0125<br />
b 11 b 12 b 13 b 21 b 22 b 23 b 31 b 32 b 33<br />
−0.0299 0.7954 −0.3863 −0.0549 1.0424 −0.0206 −0.0333 0.0257 0.9875<br />
c 11 c 12 c 13 c 21 c 22 c 23 c 31 c 32 c 33<br />
−0.0469 0.4557 0.6980 −0.0315 0.0391 0.9075 0.0602 −1.1345 0.0078<br />
Ẋ = m 0 − m 0 0<br />
m 0 − m 0 −1<br />
0 0<br />
x y<br />
z A 0X,<br />
where X=x,y,z T . The corresponding characteristic equation<br />
of O is<br />
3 + m 0 1− 2 + − m 0 =0.<br />
9<br />
10<br />
Let =14.5, =1.25, m 0 =0.15, <strong>and</strong> m 1 =−0.17. Solving<br />
10 gives 1 2.0592, 2,3 −0.0171±1.1489i, <strong>and</strong> the corresponding<br />
eigenvectors are v 1 0.9981,0.0532,0.0323 T<br />
<strong>and</strong><br />
Denote<br />
0.2440<br />
v 2 = w 2 ± w 3 i 0.0086<br />
− 0.6328 − 0.4492<br />
± − 0.5816 i.<br />
0<br />
= m 1 − m 1 0<br />
x<br />
z<br />
Ẋ m 1 − m 1 −1 y A 1X,<br />
0 0<br />
11<br />
where X=x,y,z T , <strong>and</strong> its corresponding eigenvalues are<br />
¯ 1−2.3269, ¯ 2,30.0159±1.1506i. The corresponding<br />
eigenvectors are<br />
<strong>and</strong><br />
Denote<br />
v¯1 0.9980,0.0559,− 0.03<br />
0.2258<br />
v¯2 = w¯ 2 ± w¯ 3i 0.0080<br />
0.6279 0.4696<br />
± 0.5780 i.<br />
0<br />
0.9981 0.2440 − 0.4492<br />
P = v 1 ,w 1 ,w 2 0.0532 0.0086 − 0.5816<br />
.<br />
0.0323 − 0.6328 0<br />
Thus, the solution of linear system 9 with initial value X 0 is<br />
XtP s 11 0 0<br />
<br />
0 s 22 − s 32 P−1 X 0<br />
0 s 32 s 22<br />
t 11 t 12 t 13<br />
t 21 t 22 t 23<br />
t 31 t 32 t 33 X 0,<br />
where s 11 =e 2.0592t , s 22 =e −0.0171t cos1.1489t, s 32<br />
=e −0.0171t sin1.1489t, <strong>and</strong> t ij =a ij e 2.0592t +b ij e −0.0171t<br />
cos1.1489t+c ij e −0.0171t sin1.1489t1i, j3, in<br />
which a ij ,b ij ,c ij 1i, j3 are given in Table I.<br />
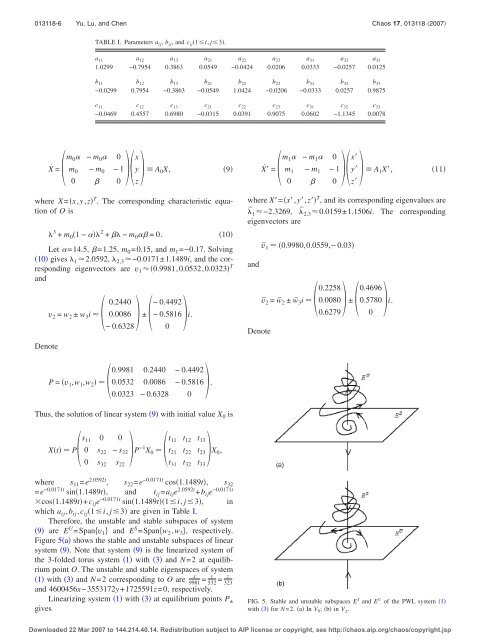
Therefore, the unstable <strong>and</strong> stable subspaces of system<br />
9 are E U =Spanv 1 <strong>and</strong> E S =Spanw 2 ,w 3 , respectively.<br />
Figure 5a shows the stable <strong>and</strong> unstable subspaces of linear<br />
system 9. Note that system 9 is the linearized system of<br />
the 3-folded <strong>torus</strong> system 1 with 3 <strong>and</strong> N=2 at equilibrium<br />
point O. The unstable <strong>and</strong> stable eigenspaces of system<br />
x<br />
9981 = y<br />
532 = z<br />
323<br />
1 with 3 <strong>and</strong> N=2 corresponding to O are<br />
<strong>and</strong> 4600456x−3553172y+1725591z=0, respectively.<br />
Linearizing system 1 with 3 at equilibrium points P ±<br />
gives<br />
FIG. 5. Stable <strong>and</strong> unstable subspaces E S <strong>and</strong> E U of the PWL system 1<br />
with 3 for N=2. a In V 0 ; b in V ± .<br />
Downloaded 22 Mar 2007 to 144.214.40.14. Redistribution subject to AIP license or copyright, see http://chaos.aip.org/chaos/copyright.jsp










