

Multifolded torus chaotic attractors: Design and implementation
Multifolded torus chaotic attractors: Design and implementation
Multifolded torus chaotic attractors: Design and implementation

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
013118-8 Yu, Lu, <strong>and</strong> Chen Chaos 17, 013118 2007<br />
For N2, we can transform the multifolded <strong>torus</strong> system<br />
1 with 3 into two basic linear systems 9 <strong>and</strong> 11 by<br />
using a simple linear transformation. In the following, we<br />
only select N=5 as an example to explain how to construct<br />
the linear transformation. When N=5, construct the following<br />
linear transformation:<br />
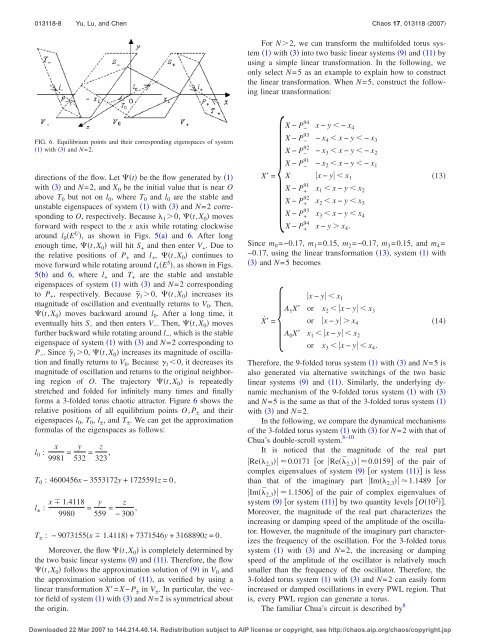
FIG. 6. Equilibrium points <strong>and</strong> their corresponding eigenspaces of system<br />
1 with 3 <strong>and</strong> N=2.<br />
directions of the flow. Let t be the flow generated by 1<br />
with 3 <strong>and</strong> N=2, <strong>and</strong> X 0 be the initial value that is near O<br />
above T 0 but not on l 0 , where T 0 <strong>and</strong> l 0 are the stable <strong>and</strong><br />
unstable eigenspaces of system 1 with 3 <strong>and</strong> N=2 corresponding<br />
to O, respectively. Because 1 0, t,X 0 moves<br />
forward with respect to the x axis while rotating clockwise<br />
around l 0 E U , as shown in Figs. 5a <strong>and</strong> 6. After long<br />
enough time, t,X 0 will hit S + <strong>and</strong> then enter V + . Due to<br />
the relative positions of P + <strong>and</strong> l + , t,X 0 continues to<br />
move forward while rotating around l + E S , as shown in Figs.<br />
5b <strong>and</strong> 6, where l + <strong>and</strong> T + are the stable <strong>and</strong> unstable<br />
eigenspaces of system 1 with 3 <strong>and</strong> N=2 corresponding<br />
to P + , respectively. Because ¯ 10, t,X 0 increases its<br />
magnitude of oscillation <strong>and</strong> eventually returns to V 0 . Then,<br />
t,X 0 moves backward around l 0 . After a long time, it<br />
eventually hits S − <strong>and</strong> then enters V − . Then, t,X 0 moves<br />
further backward while rotating around l − , which is the stable<br />
eigenspace of system 1 with 3 <strong>and</strong> N=2 corresponding to<br />
P − . Since ¯ 10, t,X 0 increases its magnitude of oscillation<br />
<strong>and</strong> finally returns to V 0 . Because 1 0, it decreases its<br />
magnitude of oscillation <strong>and</strong> returns to the original neighboring<br />
region of O. The trajectory t,X 0 is repeatedly<br />
stretched <strong>and</strong> folded for infinitely many times <strong>and</strong> finally<br />
forms a 3-folded <strong>torus</strong> <strong>chaotic</strong> attractor. Figure 6 shows the<br />
relative positions of all equilibrium points O, P ± <strong>and</strong> their<br />
eigenspaces l 0 , T 0 , l ± , <strong>and</strong> T ± . We can get the approximation<br />
formulas of the eigenspaces as follows:<br />
l 0 :<br />
x<br />
9981 = y<br />
532 = z<br />
323 ,<br />
T 0 : 4600456x − 3553172y + 1725591z =0,<br />
l ± : x 1.4118<br />
9980<br />
= y<br />
559 = z<br />
− 300 ,<br />
T ± : − 9073155x 1.4118 + 7371546y + 3168890z =0.<br />
Moreover, the flow t,X 0 is completely determined by<br />
the two basic linear systems 9 <strong>and</strong> 11. Therefore, the flow<br />
t,X 0 follows the approximation solution of 9 in V 0 <strong>and</strong><br />
the approximation solution of 11, as verified by using a<br />
linear transformation X=X− P ± in V ± . In particular, the vector<br />
field of system 1 with 3 <strong>and</strong> N=2 is symmetrical about<br />
the origin.<br />
94<br />
− P − x − y − x 4<br />
93<br />
X − P − − x 4 x − y − x 3<br />
92<br />
X − P − − x 3 x − y − x 2<br />
91<br />
X − P − − x 2 x − y − x 1<br />
X =X X x − y x 1<br />
91<br />
X − P + x 1 x − y x 2<br />
92<br />
X − P + x 2 x − y x 3<br />
93<br />
X − P + x 3 x − y x 4<br />
94<br />
X − P + x − y x 4 .<br />
13<br />
Since m 0 =−0.17, m 1 =0.15, m 2 =−0.17, m 3 =0.15, <strong>and</strong> m 4 =<br />
−0.17, using the linear transformation 13, system 1 with<br />
3 <strong>and</strong> N=5 becomes<br />
=<br />
x − y x 1<br />
A 1 X or x 2 x − y x 3<br />
Ẋ or x − y x 4<br />
A 0 X x 1 x − y x 2<br />
or x 3 x − y x 4 .<br />
14<br />
Therefore, the 9-folded <strong>torus</strong> system 1 with 3 <strong>and</strong> N=5 is<br />
also generated via alternative switchings of the two basic<br />
linear systems 9 <strong>and</strong> 11. Similarly, the underlying dynamic<br />
mechanism of the 9-folded <strong>torus</strong> system 1 with 3<br />
<strong>and</strong> N=5 is the same as that of the 3-folded <strong>torus</strong> system 1<br />
with 3 <strong>and</strong> N=2.<br />
In the following, we compare the dynamical mechanisms<br />
of the 3-folded <strong>torus</strong> system 1 with 3 for N=2 with that of<br />
Chua’s double-scroll system. 8–10<br />
It is noticed that the magnitude of the real part<br />
Re 2,3 0.0171 or Re¯ 2,30.0159 of the pair of<br />
complex eigenvalues of system 9 or system 11 is less<br />
than that of the imaginary part Im 2,3 1.1489 or<br />
Im¯ 2,31.1506 of the pair of complex eigenvalues of<br />
system 9 or system 11 by two quantity levels O10 2 .<br />
Moreover, the magnitude of the real part characterizes the<br />
increasing or damping speed of the amplitude of the oscillator.<br />
However, the magnitude of the imaginary part characterizes<br />
the frequency of the oscillation. For the 3-folded <strong>torus</strong><br />
system 1 with 3 <strong>and</strong> N=2, the increasing or damping<br />
speed of the amplitude of the oscillator is relatively much<br />
smaller than the frequency of the oscillator. Therefore, the<br />
3-folded <strong>torus</strong> system 1 with 3 <strong>and</strong> N=2 can easily form<br />
increased or damped oscillations in every PWL region. That<br />
is, every PWL region can generate a <strong>torus</strong>.<br />
The familiar Chua’s circuit is described by 8<br />
Downloaded 22 Mar 2007 to 144.214.40.14. Redistribution subject to AIP license or copyright, see http://chaos.aip.org/chaos/copyright.jsp










