

Chemical Process Control a First Course with Matlab
Chemical Process Control a First Course with Matlab
Chemical Process Control a First Course with Matlab

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2 - 26<br />
Let us try one simple example. Say if we keep the inlet temperature constant at our desired<br />
steady state, the statement in deviation variable (<strong>with</strong>out the apostrophe) is<br />
T i (t) = 0 , and T i (s) = 0<br />
Now we want to know what happens if the steam temperature increases by 10 °C. This change in<br />
deviation variable is<br />
T H = Mu(t) and T H (s) = M s<br />
, where M = 10 °C<br />
We can write<br />
T(s) =<br />
K p<br />
τ p s+1<br />
M<br />
s (2-50)<br />
After partial fraction expansion,<br />
1<br />
T(s) = MK p<br />
s –<br />
τ p<br />
τ p<br />
s+1<br />
Inverse transform via table look-up gives our time-domain solution for the deviation in T: 1<br />
T(t) = MK p 1 – e – t/τ p<br />
(2-51)<br />
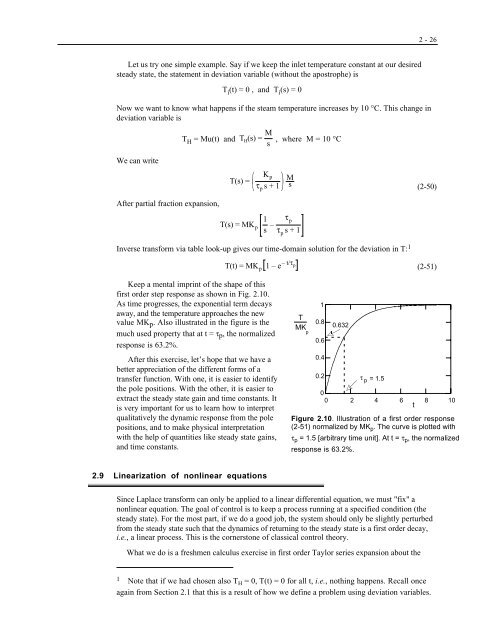
Keep a mental imprint of the shape of this<br />
first order step response as shown in Fig. 2.10.<br />
As time progresses, the exponential term decays<br />
away, and the temperature approaches the new<br />
value MK p . Also illustrated in the figure is the<br />
much used property that at t = τp, the normalized<br />
response is 63.2%.<br />
After this exercise, let’s hope that we have a<br />
better appreciation of the different forms of a<br />
transfer function. With one, it is easier to identify<br />
the pole positions. With the other, it is easier to<br />
extract the steady state gain and time constants. It<br />
is very important for us to learn how to interpret<br />
qualitatively the dynamic response from the pole<br />
positions, and to make physical interpretation<br />
<strong>with</strong> the help of quantities like steady state gains,<br />
and time constants.<br />
1<br />
p<br />
T<br />
MK<br />
0.8<br />
0.632<br />
0.6<br />
0.4<br />
0.2<br />
τ p = 1.5<br />
0<br />
0 2 4 6 8 10<br />
t<br />
Figure 2.10. Illustration of a first order response<br />
(2-51) normalized by MK p . The curve is plotted <strong>with</strong><br />
τ p = 1.5 [arbitrary time unit]. At t = τ p , the normalized<br />
response is 63.2%.<br />
2.9 Linearization of nonlinear equations<br />
Since Laplace transform can only be applied to a linear differential equation, we must "fix" a<br />
nonlinear equation. The goal of control is to keep a process running at a specified condition (the<br />
steady state). For the most part, if we do a good job, the system should only be slightly perturbed<br />
from the steady state such that the dynamics of returning to the steady state is a first order decay,<br />
i.e., a linear process. This is the cornerstone of classical control theory.<br />
What we do is a freshmen calculus exercise in first order Taylor series expansion about the<br />
1 Note that if we had chosen also T H = 0, T(t) = 0 for all t, i.e., nothing happens. Recall once<br />
again from Section 2.1 that this is a result of how we define a problem using deviation variables.